СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ введен в действие с 01.01.2025.
Название документа
"ГОСТ Р 60.5.3.2-2024 (ИСО 18646-3:2021). Национальный стандарт Российской Федерации. Роботы и робототехнические устройства. Рабочие характеристики и соответствующие методы испытаний сервисных роботов. Часть 3. Манипулирование"
(утв. и введен в действие Приказом Росстандарта от 18.12.2024 N 1935-ст)
"ГОСТ Р 60.5.3.2-2024 (ИСО 18646-3:2021). Национальный стандарт Российской Федерации. Роботы и робототехнические устройства. Рабочие характеристики и соответствующие методы испытаний сервисных роботов. Часть 3. Манипулирование"
(утв. и введен в действие Приказом Росстандарта от 18.12.2024 N 1935-ст)
Утвержден и введен в действие
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 18 декабря 2024 г. N 1935-ст
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
РОБОТЫ И РОБОТОТЕХНИЧЕСКИЕ УСТРОЙСТВА
РАБОЧИЕ ХАРАКТЕРИСТИКИ И СООТВЕТСТВУЮЩИЕ МЕТОДЫ
ИСПЫТАНИЙ СЕРВИСНЫХ РОБОТОВ
ЧАСТЬ 3
МАНИПУЛИРОВАНИЕ
Robots and robotic devices. Performance criteria and related
test methods for service robots. Part 3. Manipulation
(ISO 18646-3:2021, Robotics - Performance criteria
and related test methods for service robots - Part 3:
Manipulation, MOD)
ГОСТ Р 60.5.3.2-2024
(ИСО 18646-3:2021)
ОКС 25.040.30
Дата введения
1 января 2025 года
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) совместно с Обществом с ограниченной ответственностью "Открытая Робототехника" (ООО "Открытая Робототехника") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 18 декабря 2024 г. N 1935-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 18646-3:2021 "Робототехника. Рабочие характеристики и соответствующие методы испытаний сервисных роботов. Часть 3. Манипулирование" (ISO 18646-3:2021 "Robotics - Performance criteria and related test methods for service robots - Part 3: Manipulation", MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту. Технические отклонения выделены в тексте курсивом.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы моделирования и программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисные манипуляционные роботы.
Настоящий стандарт определяет рабочие характеристики манипулирования для сервисных роботов, а также методы испытаний для их оценки. Подразумевается, что пользователи настоящего стандарта выберут для проведения оценочных испытаний рабочие характеристики, соответствующие их конкретным требованиям.
В ГОСТ Р 60.3.3.1-2016 определены испытания по оценке погрешности позиционирования и погрешности отработки траектории для манипуляторов, которые могут быть выполнены в дополнение к испытаниям, определенным в настоящем стандарте.
Испытания по перемещению мобильных роботов, предназначенные для оценки рабочих характеристик, таких как номинальная скорость и параметры торможения, определены в ГОСТ Р 60.6.3.14-2019. Испытания мобильных роботов по оценке погрешности и повторяемости достижения заданного пространственного расположения определены в ГОСТ Р 60.6.3.15-2021.
Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 18646-3:2021.
В настоящий стандарт внесены следующие технические отклонения по отношению к ИСО 18646-3:2021:
- настоящий стандарт оформлен с соблюдением правил, установленных в ГОСТ Р 1.5, в соответствии с ГОСТ Р 1.7-2014, 7.2;
- в связи с опубликованием новой редакции международного стандарта ИСО 8373:2021, все ссылки на ИСО 8373:2012 заменены ссылками на ГОСТ Р 60.0.0.46:2022, идентичный ИСО 8373:2021;
- нормативная ссылка на ИСО 9379:2005 исключена вместе с частью положений, в которых она приведена в качестве пояснения, в соответствии с ГОСТ 1.3-2014, 7.6.5;
- добавлены нормативные ссылки на ГОСТ 475-2016 и ГОСТ 5089-2011;
- в разделе 3 определения терминов приведены в соответствии с идентичными национальными стандартами;
- элемент "Библиография" исключен из настоящего стандарта в соответствии с ГОСТ 1.3-2014, 7.6.6.
Настоящий стандарт устанавливает методы определения и оценки следующих рабочих характеристик манипулирования для сервисных роботов:
- размер захватываемого образца;
- сила сжатия;
- сопротивление проскальзыванию в захватном устройстве;
- открывание откидной двери;
- открывание раздвижной двери.
Существуют и другие характеристики захватывания образцов и вариантов использования манипуляционных возможностей сервисных роботов. Предполагается, что они будут определены в последующих изданиях настоящего стандарта.
Требования настоящего стандарта распространяются только на сервисные роботы, эксплуатируемые в закрытых помещениях. Однако определенные в нем методики испытаний могут также быть применены и к роботам, работающим на открытом воздухе.
Область применения настоящего стандарта не распространяется на верификацию или валидацию требований безопасности.
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 475-2016 Блоки дверные деревянные и комбинированные. Общие технические условия
ГОСТ 5089-2011 Замки, защелки, механизмы цилиндровые. Технические условия
ГОСТ Р 60.2.2.1/ИСО 13482:2014 Роботы и робототехнические устройства. Требования безопасности для роботов по персональному уходу
В настоящем стандарте применены термины по ГОСТ Р 60.2.2.1, а также следующие термины с соответствующими определениями:
3.1
робот (robot): Программируемый исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования. Примечание 1 - В состав робота входит система управления. Примечание 2 - Примерами конструктивных разновидностей роботов являются манипулятор, мобильная платформа и носимый робот. [ГОСТ Р 60.0.0.4-2023, статья 3.1] |
3.2
сервисный робот (service robot): Робот для персонального или профессионального использования, который выполняет задания, полезные для людей или оборудования. Примечание 1 - Задания при персональном использовании включают перемещение или обслуживание объектов, транспортировку, физическую поддержку, предоставление руководств или информации, уход, приготовление пищи и обработку продуктов, уборку. Примечание 2 - Задания при профессиональном использовании включают осмотр, наблюдение, манипулирование объектами, перевозку людей, предоставление руководств или информации, приготовление пищи и обработку продуктов, уборку. [ГОСТ Р 60.0.0.4-2023, статья 3.7] |
3.3
мобильная платформа (mobile platform): Совокупность компонентов, обеспечивающих передвижение. Примечание 1 - Мобильная платформа может включать шасси, которое может быть использовано для поддержки нагрузки. Примечание 2 - Мобильная платформа может иметь конструкцию для установки манипулятора. Примечание 3 - Мобильная платформа, следующая по предварительно заданному маршруту, указанному маркерами или внешними командами управления, обычно используется для решения логистических задач в промышленной автоматизации и часто называется автоматической самоходной тележкой (AGV) или промышленной самоходной платформой. Стандарты для подобных машин разрабатывает ИСО/ТК 110. [ГОСТ Р 60.0.0.4-2023, статья 4.16] |
3.4
манипулятор (manipulator): Механизм, состоящий из последовательности сочлененных сегментов, перемещающихся вращательно или поступательно друг относительно друга. Примечание 1 - В состав манипулятора входят приводы робота. Примечание 2 - В состав манипулятора не входит рабочий орган. Примечание 3 - Манипулятор обычно состоит из руки и запястья. [ГОСТ Р 60.0.0.4-2023, статья 4.14] |
3.5
рабочий орган (end-effector): Устройство, специально разработанное для закрепления на механическом интерфейсе с целью обеспечить выполнение задания роботом. Пример - Захватное устройство, сварочный пистолет, краскопульт. [ГОСТ Р 60.0.0.4-2023, статья 4.12] |
3.6
захватное устройство (gripper): Рабочий орган, сконструированный для захватывания и удержания объектов. [ГОСТ Р 60.0.0.4-2023, статья 4.13] |
3.7
ладонь (palm): Жесткий элемент в основной механической конструкции захватного устройства, на котором закреплены первые шарниры пальцев. Примечание - Ладонь может вступать в непосредственный контакт с объектами. [ГОСТ Р 60.3.0.2-2020, статья 4.2.1.2] |
3.8
нормальные условия эксплуатации (normal operating conditions): Диапазон условий внешней среды и других параметров, в которых предполагается эксплуатация робота в соответствии с указаниями изготовителя. Примечание 1 - К условиям внешней среды относятся температура и влажность. Примечание 2 - К другим параметрам внешней среды относятся нестабильность источника электропитания и электромагнитные поля. [ГОСТ Р 60.0.0.4-2023, статья 7.1] |
3.9
автономный режим (autonomous mode): Рабочий режим, при котором робот выполняет задание без непосредственного вмешательства человека. Пример - Сервисный робот, ожидающий взаимодействия (команды). [ГОСТ Р 60.0.0.4-2023, статья 6.13.4] |
3.10 тестовая конфигурация (test configuration): Конкретное расположение образцов, участвующих в испытании.
3.11 попытка (trial): Однократное выполнение процедуры испытания при идентичной тестовой конфигурации.
Примечание - Попытка может быть выполнена несколько раз.
4.1 Общие положения
Сервисный робот (далее - робот) должен быть собран, имея в своем составе мобильную платформу, если требуется, манипулятор и захватное устройство, полностью заряжен и работоспособен. Если предусмотрены диагностические тесты, которые должны быть выполнены до начала работы, то они должны быть успешно завершены. Необходимые меры предосторожности должны быть предприняты для защиты персонала во время испытаний. Испытаниям должна предшествовать предусмотренная изготовителем подготовка робота к эксплуатации.
Все рабочие характеристики должны быть измерены при нормальных условиях эксплуатации, указанных в протоколе испытаний.
Все датчики, используемые при испытаниях, установленных в настоящем стандарте, должны быть откалиброваны до начала любого испытания.
Робот может использовать любые датчики и средства распознавания для идентификации образца в каждом испытании, которые должны быть указаны в протоколе испытаний.
При проведении испытаний, установленных в настоящем стандарте, должны быть соблюдены все условия, определенные в данном разделе, если иное не указано в конкретных пунктах.
4.2 Рабочий режим
Каждое испытание, установленное в настоящем стандарте, должно быть выполнено при работе сервисного робота в автономном режиме.
4.3 Тестовые конфигурации и попытки
Каждое испытание, установленное в настоящем стандарте, может предусматривать разные тестовые конфигурации, для которых может потребоваться разная методика испытания. Для каждой тестовой конфигурации должно быть выполнено несколько попыток, если это определено в методике испытания.
5.1 Общие положения
Целью испытаний, установленных в данном разделе, является определение характеристик захватывания. В данном разделе определены три характеристики, хотя существуют и другие. Предполагается, что большее число характеристик захватывания и подробных методик испытаний для их оценки будет определено в последующих изданиях настоящего стандарта.
5.2 Способность захвата образца
5.2.1 Цель
Целью данного испытания является подтверждение способности робота захватывать и перемещать образцы с предельными размерами.
5.2.2 Испытательный стенд
Компоновка испытательного стенда показана на рисунке 1. В испытании используют три образца - цилиндр, параллелепипед и сферу, представленные в таблице 1, которые должны быть изготовлены из поливинилхлорида (ПВХ). Если изготовитель робота выберет материал, отличный от ПВХ, то наименование этого материала и его физические характеристики (например, вес) должны быть указаны в протоколе испытания.
 | |
a) цилиндр или параллелепипед | b) сфера |
a - D или W
для подтверждения способности робота захватывать
и перемещать образцы с предельными размерами
Таблица 1
Наименование | Геометрия | Описание |
Цилиндр | 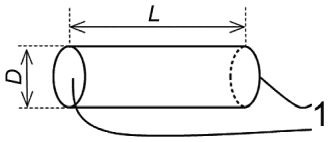 | L - длина D - диаметр |
Параллелепипед | 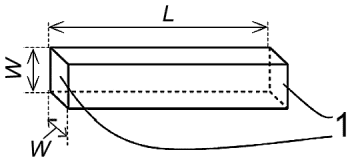 | L - длина W - ширина |
Сфера | 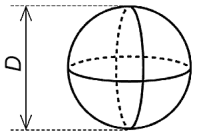 | D - диаметр |
Образцы могут иметь внутри пустотелость для того, чтобы общий вес захватного устройства и образца не превышал максимально допустимую нагрузку для робота. При этом форма, размеры и вес образцов должны быть указаны в протоколе испытаний. 1 - торцевая поверхность | ||
Испытания проводят на образцах всех типов с максимальными и минимальными размерами диаметра (D) для цилиндра и сферы и ширины (W) для параллелепипеда. Данные размеры могут быть указаны изготовителем робота или испытателем исходя из размера захватного устройства.
Длина (L) цилиндра и параллелепипеда должна быть больше поперечного размера захватного устройства. При захвате цилиндра или параллелепипеда захватное устройство должно быть расположено перпендикулярно его длинной стороне, т.е. захватывание образца за его торцевые поверхности, показанные в таблице 1, запрещено.
Образец должен быть размещен таким образом, чтобы число точек контакта между захватным устройством и образцом было максимальным. Например, контакт с ладонью захватного устройства по возможности должен обеспечивать надежное удержание образца.
Для обеспечения устойчивого вертикального расположения образца может быть использована опора или другая оснастка, как показано на рисунке 1.
Робот должен быть способен во время испытания удерживать образец без проскальзывания. Скорость и ускорение перемещения объекта во время испытания задает изготовитель или испытатель.
5.2.3 Методика испытания
В испытании используют шесть тестовых конфигураций, включающих образцы всех трех типов с максимальными и минимальными размерами.
При выполнении каждой попытки необходимо соблюдать следующий порядок действий:
a) Робота, оснащенного надлежащим манипулятором и захватным устройством, устанавливают в начальное пространственное расположение, при котором захватное устройство расположено вокруг геометрического центра образца (рисунок 1).
b) Захватное устройство захватывает образец, после чего манипулятор перемещает образец на 100 мм вверх с заданными скоростью и ускорением (позиция A).
c) Манипулятор перемещает захватное устройство с образцом в наиболее неблагоприятное пространственное расположение, заявленное изготовителем, (позиция B) с заданными скоростью и ускорением и останавливается в этой позиции на 1 с. Позиция B должна быть расположена на таком расстоянии от позиции A, чтобы робот успел развить заданную скорость.
Примечание - Если изготовитель не определил "наиболее неблагоприятное пространственное расположение" для захватного устройства, то за позицию B может быть выбрано пространственное расположение, при котором закрытое захватное устройство направлено вниз так, чтобы сила тяжести выталкивала образец из захватного устройства.
d) Робот перемещается обратно в позицию A с заданными скоростью и ускорением.
e) Робот возвращается в начальное пространственное расположение и отпускает образец.
Испытание повторяют по 10 раз для каждого размера образца. Испытание считают успешным, если захватное устройство удерживает образец без проскальзывания во всех 10 попытках. В противном случае, испытание считают неудачным.
Если испытание было неудачным для каких-либо тестовых конфигураций, то его можно повторить с другими максимальным и минимальным размерами образца.
5.2.4 Результаты испытания
Результаты испытания должны быть представлены в протоколе испытания. Протокол испытания должен содержать размеры образцов и конкретные условия проведения испытания, включая вес образцов, пространственные расположения робота и информацию о том, было ли испытание успешным или неудачным. Пример формата протокола испытания приведен в таблице 2.
Таблица 2
и перемещения образцов с предельными размерами
Образец | Материал | Размер образца | Значение | Вес | Успех/неудача |
Цилиндр | Максимальный | L: D: | |||
Минимальный | L: D: | ||||
Параллелепипед | Максимальный | L: W: | |||
Минимальный | L: W: | ||||
Сфера | Максимальный | D: | |||
Минимальный | D: | ||||
Здесь должна быть представлена информация о позициях A и B, а также о заданных значениях скорости и ускорения. | |||||
5.3.1 Цель
Целью данного испытания является определение силы сжатия захватного устройства. В испытании измеряют максимальное усилие, которое захватное устройство может приложить к образцу. Величина силы сжатия коррелирована с полезной нагрузкой захватного устройства, а также с его способностью сопротивляться внешним силам при выполнении операций захватывания.
5.3.2 Испытательный стенд
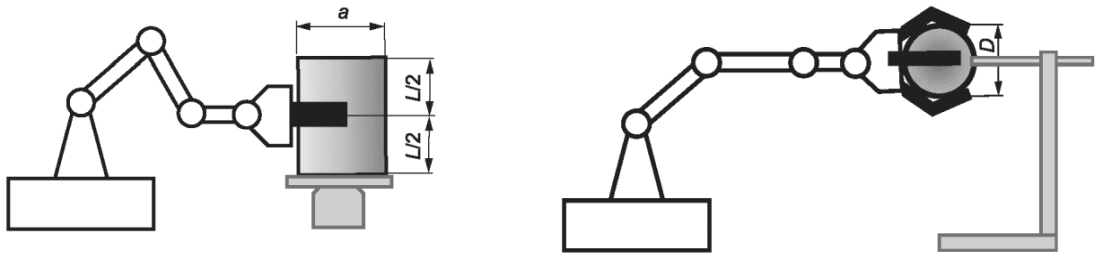
Компоновка испытательного стенда показана на рисунке 2. Для измерения силы сжатия в качестве образцов следует использовать цилиндры, диаметры которых соответствуют максимальной, приведенной в таблице 1, и средней величине раскрытия захватного устройства. Длина L образца должна быть больше поперечного размера захватного устройства.
Примечание - В испытании используют не минимальную, а среднюю величину раскрытия захватного устройства, так как минимальная величина раскрытия может быть слишком мала для выполнения данного испытания. Среднюю величину раскрытия определяют, как (максимальная величина раскрытия + минимальная величина раскрытия)/2.
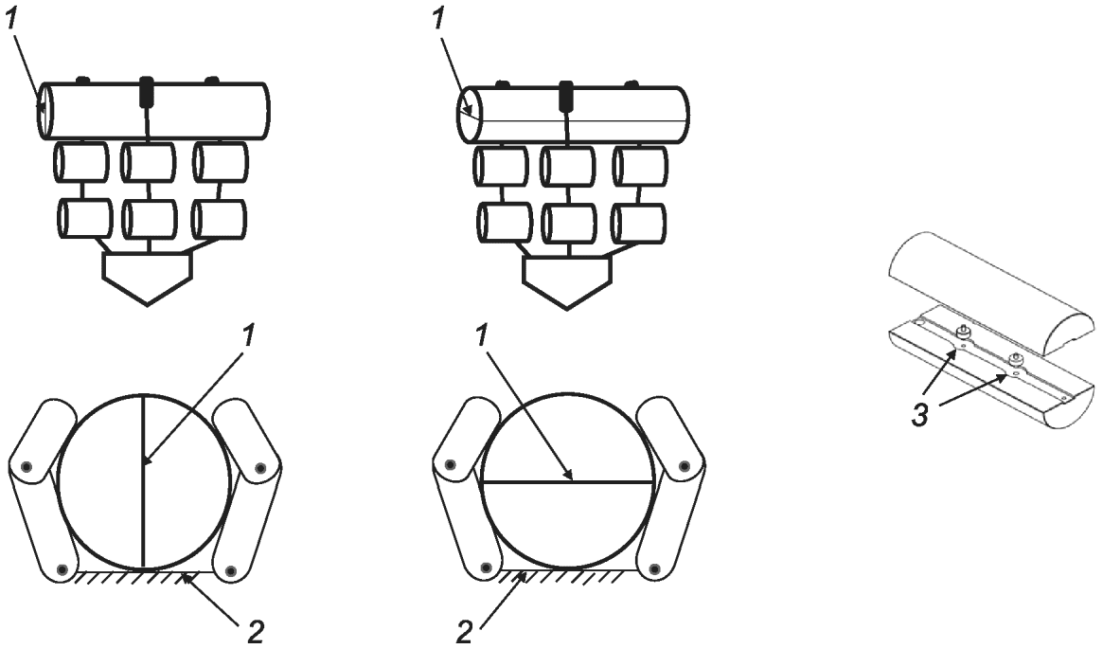 | ||
a) перпендикулярная ориентация | b) параллельная ориентация | |
1 - торцевая плоскость; 2 - ладонь; 3 - датчики усилия
Цилиндр должен быть разделен на два полуцилиндра, как показано на рисунке 2 с), и по середине плоской поверхности двух полуцилиндров должны быть установлены два датчика усилия. Датчики расположены на расстояниях 1/3 и 2/3 длины цилиндра.
Цилиндр должен быть установлен либо с перпендикулярной ориентацией, либо с параллельной ориентацией относительно захватного устройства, как показано на рисунке 2. При перпендикулярной ориентации плоская поверхность полуцилиндра перпендикулярна ладони захватного устройства. При параллельной ориентации плоская поверхность полуцилиндра параллельна ладони захватного устройства.
5.3.3 Методика испытания
В испытании используют четыре тестовые конфигурации, включающие цилиндры максимального и среднего диаметра с перпендикулярной и параллельной ориентацией.
При выполнении каждой попытки необходимо соблюдать следующий порядок действий:
a) Робота, оснащенного надлежащим манипулятором и захватным устройством, устанавливают в начальное пространственное расположение, при котором захватное устройство расположено около геометрического центра образца заданного размера. Образец с заданной ориентацией размещают горизонтально над захватным устройством.
b) Захватное устройство захватывает образец с максимальной силой.
c) После того, как захватное устройство достигнет максимального устойчивого усилия сжатия, снимают показания с каждого датчика усилия в течение 10 с. Среднее значение силы сжатия получают сложением всех показаний датчиков за 10 с и делением на число показаний. За силу сжатия принимают сумму средних значений показаний двух датчиков.
d) Робот отпускает образец.
Испытание повторяют по 30 раз для каждого размера и ориентации образца. Должны быть вычислены среднее значение силы сжатия и среднеквадратическое отклонение за 30 попыток.
Примечание - 30 попыток выбрано для того, чтобы обеспечить статистическую значимость результата. При приближении числа попыток к 30, t-распределение Стьюдента приближается к нормальному распределению с доверительным интервалом 95%. При увеличении числа измерений достоверность полученной характеристики силы сжатия захватного устройства робота повышается.
5.3.4 Результаты испытания
Результаты испытания должны быть представлены в протоколе испытания. Протокол испытания должен содержать размер образца, вес, пространственное расположение робота и результаты измерения для данного образца, а также статистические данные. Пример формата протокола испытания приведен в таблице 3.
Таблица 3
Образец | Материал | Размеры образца | Значение | Вес | Ориентация | Сила сжатия | |
Среднее значение | Среднеквадратическое отклонение | ||||||
Цилиндр | Максимальный | L: D: | Перпендикулярная | ||||
Параллельная | |||||||
Средний | L: D: | Перпендикулярная | |||||
Параллельная | |||||||
Здесь должна быть представлена информация о начальном пространственном расположении робота. | |||||||
5.4 Сила трения скольжения
5.4.1 Цель
Целью данного испытания является определение силы трения скольжения в захватном устройстве, обеспечивающей удержание образца.
5.4.2 Испытательный стенд
Компоновка испытательного стенда показана на рисунке 3. Для измерения силы трения скольжения в захватном устройстве в качестве образцов следует использовать цилиндры, диаметры которых соответствуют максимальной, приведенной в таблице 1, и средней величине раскрытия захватного устройства. Длина L образца должна быть больше поперечного размера захватного устройства.
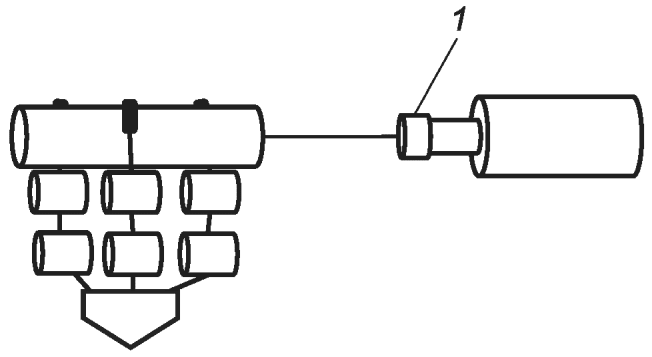
1 - приспособление с датчиком усилия
силы трения скольжения
Примечание - В испытании используют не минимальную, а среднюю величину раскрытия захватного устройства, так как минимальная величина раскрытия может быть слишком мала для выполнения данного испытания. Среднюю величину раскрытия определяют, как (максимальная величина раскрытия + минимальная величина раскрытия)/2.
Образец соединяют с приспособлением металлической проволокой, которая должна быть достаточно прочной, чтобы выдерживать максимальное ожидаемое усилие при испытании. Датчик, измеряющий прикладываемое усилие, должен быть установлен либо на приспособлении, либо на образце. Направление перемещения образца должно проходить вдоль линии, соединяющей цилиндр с приспособлением, как показано на рисунке 3. Натяжение проволоки может осуществляться за счет перемещения робота или приспособления.
5.4.3 Методика испытания
В испытании используют две тестовые конфигурации, включающие цилиндры максимального и среднего диаметра, удерживаемые захватным устройством.
При выполнении каждой попытки необходимо соблюдать следующий порядок действий:
a) Робота, оснащенного надлежащим манипулятором и захватным устройством, устанавливают в начальное пространственное расположение, при котором захватное устройство расположено около геометрического центра образца, размещенного горизонтально относительно захватного устройства.
b) Захватное устройство робота захватывает образец с максимальной силой.
c) Начинают регистрировать приложенное усилие. Затем осуществляют перемещение робота или приспособления вдоль продольной оси образца до фиксации проскальзывания образца в захватном устройстве.
d) После того, как будет зафиксировано заметное проскальзывание образца, перемещение останавливают и прекращают регистрацию усилия.
e) Анализируя график изменения зарегистрированного усилия, определяют силу трения скольжения как установившееся значение усилия после некоторого колебательного процесса, как показано на рисунке 4.
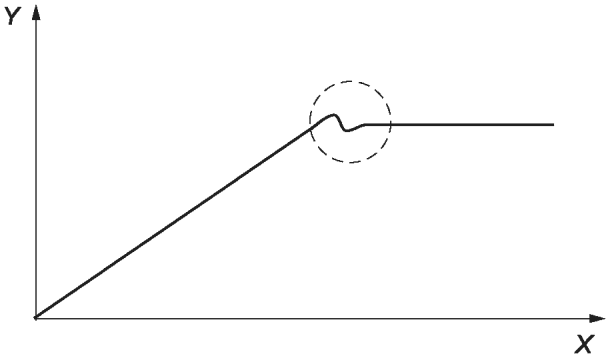
X - время, с; Y - усилие, Н
в захватном устройстве, отмеченное штриховой окружностью
Для определения силы трения скольжения в ньютонах данное испытание повторяют по 30 раз для каждого диаметра образца. Должны быть вычислены среднее значение и среднеквадратическое отклонение за 30 попыток.
5.4.4 Результаты испытания
Сила трения скольжения в захватном устройстве и конкретные условия проведения испытания, например диаметр и вес образцов, должны быть представлены в протоколе испытания. Кроме того, должен быть указан коэффициент трения, рассчитанный как (сила трения скольжения/сила сжатия, определенная по 5.3). Пример формата протокола испытания приведен в таблице 4.
Таблица 4
Образец | Материал | Коэффициент трения | Размеры образца | Значение | Вес | Сила трения скольжения | |
Среднее значение | Среднеквадратическое отклонение | ||||||
Цилиндр | Максимальный | L: D: | |||||
Средний | L: D: | ||||||
Здесь следует представить информацию о силе сжатия. | |||||||
6.1 Общие положения
Целью испытаний, определенных в данном разделе, является подтверждение манипуляционных способностей сервисных роботов при их использовании по назначению. В настоящем стандарте данные испытания ограничены открыванием дверей. Предполагается, что испытания для других вариантов использования сервисных роботов будут определены в последующих редакциях настоящего стандарта.
6.2 Открывание распашного дверного блока
6.2.1 Цель
Целью данного испытания является определение способности манипулятора с захватным устройством сервисного робота открывать распашной дверной блок. Данное испытание может быть выполнено с помощью движения мобильной платформы.
6.2.2 Испытательный стенд
Компоновка испытательного стенда показана на рисунке 5. На стенде могут быть установлены датчики для измерения движения двери.
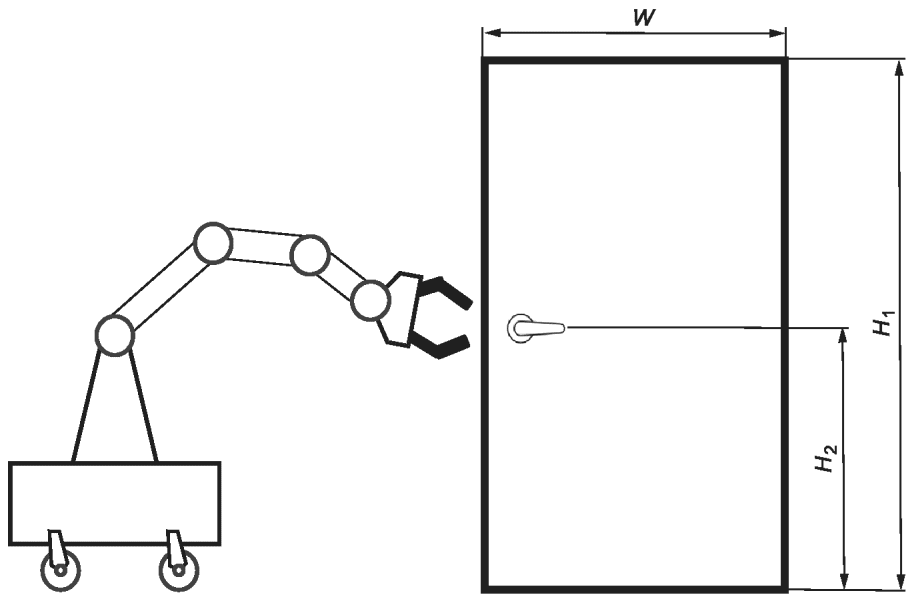
W - ширина двери; H1 - высота двери;
H2 - высота расположения дверной ручки
с распашным дверным блоком
Дверь должна иметь высоту от 1870 до 2370 мм, ширину W от 810 до 1210 мм, и толщину T от 30 до 60 мм в соответствии с ГОСТ 475-2016, приложение Б. Высота расположения дверной ручки от низа двери H2 должна составлять от 800 до 1200 мм. Роботу может быть известна информация о размерах двери до начала испытания. Данная информация может быть использована программой выполнения задания при проведении испытания.
Динамическое усилие открывания двери должно составлять не менее 0,5 Н.
Момент силы, прикладываемый к дверной ручке для воздействия на защелку, 0,6 - 2,0 Н·м в соответствии с ГОСТ 5089-2011, 5.7.3.1. Дверная ручка должна быть изготовлена из металла. Длина рукоятки дверной ручки должна составлять от 100 до 200 мм.
6.2.3 Методика испытания
В испытании используют одну тестовую конфигурацию с распашным дверным блоком, открывающимся наружу, и с ручкой рычажного типа.
При выполнении каждой попытки необходимо соблюдать следующий порядок действий:
a) Дверь закрыта, но не заперта. Робота, оснащенного манипулятором и захватным устройством, устанавливают в начальное пространственное расположение перед дверью, при этом захватное устройство должно быть расположено так, чтобы зажать дверную ручку.
b) Захватное устройство зажимает дверную ручку, и робот поворачивает ее до положения "открыто".
c) Робот открывает дверь на 90°.
d) Робот отпускает дверную ручку.
e) Измеряют угол раскрытия двери.
Данное испытание повторяют 10 раз. Испытание считают успешным, если угол раскрытия распашной двери равен (90 +/- 5)° во всех 10 попытках. В противном случае испытание считают неудачным.
6.2.4 Результаты испытания
Результаты испытания должны быть внесены в протокол испытания. Протокол должен содержать конкретные условия проведения испытания, включая динамическое усилие открывания и размеры двери, а также сведения об успехе или неудаче испытания. Кроме того, в протоколе следует указать величину момента вращения и диапазон поворота дверной ручки. Пример формата протокола испытания приведен в таблице 5.
Таблица 5
Тип двери | Материал | Размеры | Динамическое усилие открывания | Дверная ручка | Успех/неудача | |
Момент вращения | Диапазон поворота | |||||
Распашная дверь, открывающаяся наружу | H1: H2: W: T: | |||||
6.3 Открывание раздвижного дверного блока
6.3.1 Цель
Целью данного испытания является определение способности манипулятора с захватным устройством сервисного робота открывать раздвижной дверной блок. Данное испытание может быть выполнено с помощью движения мобильной платформы.
6.3.2 Испытательный стенд
Компоновка испытательного стенда показана на рисунке 6. В испытательной среде могут быть установлены датчики для измерения движения двери.
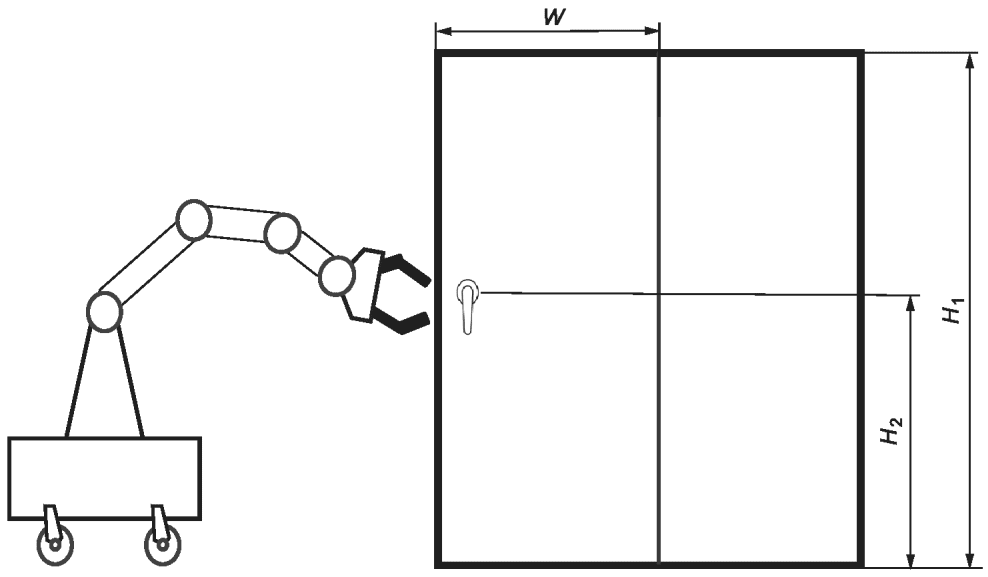
W - ширина двери; H1 - высота двери;
H2 - высота расположения дверной ручки
с раздвижным дверным блоком
Дверь должна иметь высоту H1 от 1870 до 2370 мм, ширину W от 810 до 1210 мм, и толщину T от 30 до 60 мм в соответствии с ГОСТ 475-2016, приложение Б. Высота расположения дверной ручки от низа двери, H2, должна составлять от 800 до 1200 мм. Роботу может быть известна информация о размерах двери до начала испытания. Данная информация может быть использована программой выполнения задания при проведении испытания.
Динамическое усилие открывания двери должно составлять не менее 0,5 Н.
Ручка может быть рычажного типа с вертикальной ориентацией, как показано на рисунке 6, или любого фиксированного типа, подходящего для открывания раздвижной двери. Дверная ручка должна быть изготовлена из металла. Длина рукоятки дверной ручки рычажного типа или длина ручки фиксированного типа должна составлять от 100 до 200 мм.
6.3.3 Методика испытания
В испытании используют одну тестовую конфигурацию с раздвижным дверным блоком.
При выполнении каждой попытки необходимо соблюдать следующий порядок действий:
a) Дверь закрыта, но не заперта. Робота, оснащенного манипулятором и захватным устройством, устанавливают в начальное пространственное расположение перед дверью, при этом захватное устройство должно быть расположено так, чтобы зажать дверную ручку.
b) Захватное устройство зажимает дверную ручку, и робот поворачивает ее до положения "открыто", если это применимо.
c) Робот открывает дверь на 600 мм.
d) Робот отпускает дверную ручку.
e) Измеряют расстояние раскрытия раздвижной двери.
Данное испытание повторяют 10 раз. Испытание считают успешным, если расстояние раскрытия раздвижной двери равно (600 +/- 10) мм во всех 10 попытках. В противном случае испытание считают неудачным.
6.3.4 Результаты испытания
Результаты испытания должны быть зафиксированы в протоколе испытания. Протокол должен содержать конкретные условия проведения испытания, такие как динамическое усилие открывания и размеры двери, а также сведения об успехе или неудаче испытания. Пример формата протокола испытания приведен в таблице 6.
Таблица 6
Тип двери | Материал | Размеры | Динамическое усилие открывания | Успех/неудача |
Раздвижная дверь | H1: H2: W: T: |
УДК 621.865:8:007.52:006.86:006.354 | ОКС 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, рабочие характеристики, методы испытаний, сервисные роботы, манипулирование | |