СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ вводится в действие с 01.01.2026.
Название документа
"ГОСТ Р 72226-2025. Национальный стандарт Российской Федерации. Фототопография. Сканирование лазерное воздушное. Технические требования"
(утв. и введен в действие Приказом Росстандарта от 05.08.2025 N 841-ст)
"ГОСТ Р 72226-2025. Национальный стандарт Российской Федерации. Фототопография. Сканирование лазерное воздушное. Технические требования"
(утв. и введен в действие Приказом Росстандарта от 05.08.2025 N 841-ст)
Содержание
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 5 августа 2025 г. N 841-ст
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФОТОТОПОГРАФИЯ
СКАНИРОВАНИЕ ЛАЗЕРНОЕ ВОЗДУШНОЕ
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
Phototopography. Airborne laser scanning.
Technical requirements
ГОСТ Р 72226-2025
ОКС 07.040
Дата введения
1 января 2026 года
1 РАЗРАБОТАН Публично-правовой компанией "Роскадастр" (ППК "Роскадастр")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 404 "Геодезия и картография"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 5 августа 2025 г. N 841-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Воздушное лазерное сканирование является важным источником информации о местности и объектах при создании цифровых топографических карт и планов, получении пространственных данных для выполнения кадастровых работ, решения проектных, инженерных и других задач.
Технические характеристики материалов воздушного лазерного сканирования определяют качество конечной продукции в виде цифровых моделей поверхности, цифровых моделей рельефа, цифровых моделей местности, цифровых топографических карт и планов, единой электронной картографической основы, а также новых видов продукции, таких как 3D-модели объектов и информационные модели строительных объектов ТИМ/BIM. Документ разработан в целях получения конечной продукции с требуемыми характеристиками на основе использования технологий воздушного лазерного сканирования.
Предметом стандартизации являются технические требования к процессам воздушного лазерного сканирования, используемому съемочному оборудованию, программным средствам получения и обработки материалов воздушного лазерного сканирования.
Область применения настоящего стандарта связана с предметной областью ГОСТ Р 8.794, ГОСТ Р 59328, ГОСТ Р 59562, ГОСТ Р 70078, ГОСТ Р 71863.
В процессе разработки стандарта использованы положения Федеральных законов [1], [2] и нормативных правовых документов, регламентирующих выполнение аэрофототопографических, картографических, инженерно-геодезических и кадастровых работ [3] - [7].
Настоящий стандарт распространяется на комплекс работ по воздушному лазерному сканированию, выполняемому с пилотируемых и беспилотных воздушных судов в целях топографических и инженерных съемок, производства кадастровых работ.
Настоящий стандарт предназначен для применения субъектами геодезической и картографической деятельности, а также кадастровой и градостроительной деятельности при организации и выполнении работ по воздушному лазерному сканированию местности и объектов местности.
Стандарт устанавливает технические требования к съемочному оборудованию, программным средствам, технологическим процессам и условиям получения и обработки материалов воздушного лазерного сканирования, получаемых в ходе работ.
В настоящем стандарте использованы нормативные ссылки на следующие документы:
ГОСТ 32453-2017 Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек
ГОСТ Р 51833 Фотограмметрия. Термины и определения
ГОСТ Р 52369 Фототопография. Термины и определения
ГОСТ Р 52928 Система спутниковая навигационная глобальная. Термины и определения
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: ГОСТ Р 56122 имеет название "Воздушный транспорт. Беспилотные авиационные системы. Общие требования". |
ГОСТ Р 56122 Беспилотные авиационные системы. Общие требования
ГОСТ Р 57258 Системы беспилотные авиационные. Термины и определения
ГОСТ Р 59328-2021 Аэрофотосъемка топографическая. Технические требования
ГОСТ Р 59562-2021 Съемка аэрофототопографическая. Технические требования
ГОСТ Р 70078-2022 Программно-аппаратный комплекс аэрофототопографической съемки с использованием беспилотного воздушного судна. Технические требования
ГОСТ Р 70174 Картография цифровая. Процессы создания элемента содержания "Рельеф" цифровых топографических карт масштаба 1:25 000. Общие требования
ГОСТ Р 70689 Дороги автомобильные общего пользования. Лазерное сканирование. Общие требования к проведению работ
ГОСТ Р 70690-2023 Дороги автомобильные общего пользования. Лазерное сканирование. Требования к данным лазерного сканирования на различных этапах жизненного цикла автомобильной дороги
ГОСТ Р 71863-2024 Фототопография. Лазерное сканирование. Общие положения
СП 47.13330.2016 "СНиП 11-02-96 Инженерные изыскания для строительства. Основные положения"
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов (сводов правил) в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный документ, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого документа с учетом всех внесенных в данную версию изменений. Если заменен ссылочный документ, на который дана датированная ссылка, то рекомендуется использовать версию этого документа с указанным выше годом утверждения (принятия). Если после утверждения настоящего документа в ссылочный документ, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку. Сведения о действии сводов правил целесообразно проверить в Федеральном фонде стандартов.
В настоящем стандарте применены термины по ГОСТ Р 51833, ГОСТ Р 52369, ГОСТ Р 52928, ГОСТ Р 57258, а также следующие термины с соответствующими определениями:
3.1
аэросъемка (топографическая): Съемка местности, выполняемая аэросъемочной системой того или иного типа или одновременно двумя или более съемочными системами с воздушного судна с целью создания и обновления топографических карт и планов и иных пространственных данных о местности. [ГОСТ Р 59562-2021, пункт 3.1] |
3.2
беспилотное воздушное судно: Воздушное судно, управляемое в полете пилотом, находящимся вне борта такого ВС, или выполняющее автономный полет по заданному предварительно маршруту. [ГОСТ Р 57258-2016, статья 3.1.1] |
3.3
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: имеется в виду п. 3.1.3 СП 317.1325800.2017, а не СП 47.13330.2016. |
воздушное лазерное сканирование; ВЛС: Вид работ в составе топографической съемки, выполняемый с применением лазерных сканеров (лазерных локаторов или лидаров), воздушных судов и лазерно-локационных технологий. [СП 47.13330.2016, пункт 3.1.3] |
3.4
дивергенция лазерного излучения сканера (расходимость пучка/луча сканера): Угловое расхождение диаметра пучка/луча лазерного излучения на выходе сканера по мере удаления его от оптической апертуры источника излучения, измеряемое в миллирадианах. [Адаптировано из ГОСТ Р 71863-2024, пункт 3.7] |
3.5
инерциальное измерительное устройство: Жестко связанное с аэрофотокамерой или воздушным лазерным сканером (лидаром) устройство, основанное на сочетании акселерометров и гироскопов, предназначенное для определения углов ориентации фотокамеры или лидара во время выполнения аэрофотосъемки. [ГОСТ Р 59328-2021, пункт 3.1.8] |
3.6 лазерный луч: Лазерное излучение, которое характеризуется направлением и расходимостью.
3.7 калибровочные параметры лидара: Углы выставки и координаты положения лидара относительно системы координат инерциального измерительного устройства.
3.8
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: имеется в виду п. 3.1.11 СП 317.1325800.2017, а не п. 3.1.10 СП 47.13330.2016. |
калибровочный полет: Аэросъемочный полет над территорией калибровочного полигона в соответствии с полетным планом для калибровки аэросъемочного комплекса. [СП 47.13330.2016, пункт 3.1.10] |
3.9
классификация точек лазерных отражений: Отнесение точек лазерных отражений к определенной классификационной группе по характерным признакам элементов местности и объектов. [ГОСТ Р 71863-2024, пункт 3.9] |
3.10 координатная зона: Часть земной поверхности, ограниченная меридианами с долготой, кратной 6°, при ее изображении на плоскости в картографической проекции.
3.11
лидар: Система воздушного лазерного сканирования местности, в результате которого определяются пространственные координаты точек отражения лазерного луча от поверхностей объектов местности. [ГОСТ Р 59328-2021, пункт 3.1.9] |
3.12
лидарная съемка (аэросъемка): Аэросъемка, выполняемая с помощью лидара с целью определения пространственных координат точек местности в виде облака точек лазерных отражений. [ГОСТ Р 59562-2021, пункт 3.11] |
3.13 материалы воздушного лазерного сканирования: Отвечающие установленным требованиям облака точек лазерных отражений, траектория движения воздушного судна, калибровочный сертификат и иные данные и документы, предусмотренные настоящими требованиями и требованиями технического задания, предоставляемые в результате воздушного лазерного сканирования.
3.14
облако точек лазерных отражений: Совокупность фиксируемых лазерным сканером точек земной поверхности и объектов, характеризуемых пространственными координатами и интенсивностью отражения. [ГОСТ Р 70174-2022, пункт 3.1.3] |
3.15 объект лидарной съемки: Территория площадного характера с заданными в техническом задании границами (населенный пункт, район), или совокупность территорий с определенными границами (конкретные населенные пункты района или субъекта Российской Федерации), или линейно протяженный объект (трасса, граница, береговая линия и пр.), для которых проектируется и выполняется лидарная съемка.
3.16
опознавательный знак (опознак): Точка объекта фотограмметрической съемки с известными пространственными координатами, опознанная на фотограмметрическом снимке. Примечания 1 Опознак может быть плановым (известны координаты X, Y), планово-высотным (известны все три координаты X, Y, Z) и высотным (известна только высота Z). 2 Опознак может быть использован в качестве опорной или контрольной точки при фотограмметрической обработке фотограмметрического снимка. [Адаптировано из ГОСТ Р 51833-2001, статья 34] |
3.17 область низкой достоверности: Область в облаке точек лазерных отражений от поверхности земли и/или объектов местности, где отсутствуют отражения от поверхности земли и/или объектов местности, или средняя плотность точек ниже проектируемой (минимально допустимой для конкретного вида продукции).
3.18
параметры редукции лидара: Измеренные линейные поправки для приведения фазового центра антенны спутникового приемника к началу системы координат воздушного лазерного сканера. [ГОСТ Р 59562-2021, пункт 3.18] |
3.19 первичные данные лазерного сканирования: Облака точек лазерных отражений в формате производителя оборудования, данные измерений глобальной навигационной спутниковой системы и инерциального измерительного устройства, калибровочные параметры.
3.20
плотность облака ТЛО: Количество точек лазерных отражений, приходящихся на единицу площади поверхности сканируемого объекта. [ГОСТ Р 71863-2024, пункт 3.17] |
3.21
спутниковые определения: Определения пространственных координат точек или приращений координат между точками, включающие процессы спутниковых наблюдений (измерений) и обработки измерительной информации, поступающей с навигационных спутников. [ГОСТ Р 59328-2021, пункт 3.1.19] |
3.22
точка лазерного отражения: Центр отражения лазерного луча, посылаемого и принимаемого лазерным сканером от поверхности земли и предметов на местности, точка, характеризующаяся плановым и высотным положениями, порядком отражения, интенсивностью отражения, углом отправки лазерного луча, временем регистрации, классом объекта. [СП 317.1325800.2017, пункт 3.1.12] |
3.23 угол сканирования лидара: Удвоенное значение максимального отклонения луча от среднего положения.
3.24
угловая калибровка лидара: Совокупность процессов и операций по определению углов выставки системы координат лидара относительно системы координат инерциального измерительного устройства, а также других параметров в зависимости от типа воздушного лазерного сканера, выполняемых с целью настройки аппаратуры. [Адаптировано из ГОСТ Р 59328-2021, пункт 3.1.26] |
3.25
углы выставки (аэрофотокамеры, лидара): Углы ориентации системы координат аэрофотокамеры или лидара относительно системы координат инерциального измерительного устройства, жестко связанного с аэрофотокамерой или лидаром. [ГОСТ Р 59328-2021, пункт 3.1.27] |
3.26
цифровая модель поверхности: Набор данных или файл, содержащий определенным образом представленные пространственные координаты (в определенной системе координат) множества точек, лежащих на всех открытых видимых с точек фотографирования поверхностях: поверхности земли, сооружений и проч. [ГОСТ Р 59562-2021, пункт 3.29] |
3.27
цифровая модель рельефа: Файл или набор данных, содержащий определенным образом представленные пространственные координаты множества точек земной поверхности в определенной системе отсчета. [ГОСТ Р 59562-2021, пункт 3.30] |
В стандарте применены следующие сокращения:
АФС - аэрофотосъемка;
БВС - беспилотное воздушное судно;
БС - базовая станция;
ВЛС - воздушное лазерное сканирование;
ВС - воздушное судно;
ГИС - географическая информационная система;
ГНСС - глобальная навигационная спутниковая система как обобщающее понятие, включая ГЛОНАСС, GPS и пр.;
ГСК - государственная система координат;
ЕГРН - единый государственный реестр недвижимости;
ИИУ - инерциальное измерительное устройство;
КТ - контрольная точка;
ПВС - пилотируемое воздушное судно;
ПО - программное обеспечение;
СК - система координат;
СКО - среднеквадратическое отклонение;
СКП - среднеквадратичная погрешность;
ТЗ - техническое задание;
ТИМ - технология информационного моделирования;
ТЛО - точка лазерного отражения;
ЦМР - цифровая модель рельефа;
ЦПГ - цифровой план города;
ЦТК - цифровая топографическая карта;
ЦТП - цифровой топографический план;
BIM - информационная модель строительного объекта (Building Information Model);
GPS - система глобального позиционирования США (Global Positioning System);
ITRF - международная земная (геодезическая) отсчетная основа, реализация системы координат ITRS сетью опорных пунктов на Земле (International Terrestrial Reference Frame);
LAS - открытый двоичный формат, определенный Американским обществом фотограмметрии и дистанционного зондирования (ASPRS) для обмена и архивирования данных облака точек лидара (LiDAR Aerial Survey);
LAZ - сжатая версия формат LAS (LASzip);
MPiA - режим обработки множества импульсов, находящихся в воздухе одновременно (Multiple Pulses in Air);
PDOP - геометрический фактор точности определения местоположения, выражаемый коэффициентом потери точности (Position Dilution of Precision);
PPP - метод точного абсолютного спутникового определения местоположения (Precise Point Positioning);
RINEX - формат обмена данными для файлов исходных данных спутниковых навигационных приемников (Receiver Independent Exchange Format);
TIN - нерегулярная сеть триангуляции (Triangulated Irregular Network);
UTC - шкала всемирного координированного времени (Coordinated Universal Time);
XML - расширяемый язык разметки, предназначенный для создания, хранения и передачи логической структуры данных (eXtensible Markup Language).
5.1.1 Состав системы ВЛС в общем случае должен соответствовать 5.1 ГОСТ Р 71863-2024. Дополнительно в ее состав должны входить аппаратно-программные средства навигации, включая монитор пилота для ПВС. Конструкция системы должна обеспечивать постоянство взаимного положения системы координат ИИУ и системы координат воздушного лазерного сканера на весь период установки данной платформы на борту ВС.
5.1.2 Лидар должен иметь паспорт или иной документ (сертификат, протокол, отчет о калибровке), предоставленный производителем или поставщиком оборудования, в котором указаны значения параметров калибровки лазерного сканирования.
5.1.3 Требования к лидару
Лидары, используемые для измерений в сфере государственного регулирования, должны быть утвержденного типа и иметь запись о поверке, с неистекшим сроком поверки в Федеральном информационном фонде по обеспечению единства измерений.
Характеристики лидара, устанавливаемого на БВС, должны соответствовать требованиям ГОСТ Р 70078-2022 (раздел 9).
Характеристики лидара, устанавливаемого на ПВС, должны соответствовать следующим требованиям:
- максимальная рабочая высота полета над уровнем земной поверхности не менее 2000 м (при коэффициенте отражения поверхности более 20%);
- СКО определения плановых координат не более 1/5000 от высоты полета для максимальной высоты;
- СКО определения высот точек местности не более 1/20 000 от высоты полета; для максимальной высоты полета;
- максимальная частота импульсов - не менее 50 кГц;
- максимальная частота сканирования - не менее 100 Гц;
- дивергенция - не более 0,25 мрад;
- количество отражений на один импульс - не менее 4;
- фиксация интенсивности отраженного сигнала.
5.1.4 Требования к ГНСС/ИИУ
Характеристики бортового ГНСС-приемника, используемого для определения координат ТЛО, должны соответствовать требованиям ГОСТ Р 59328-2021 (пункт 5.5.1).
Для инерциального измерительного устройства, используемого совместно с лидаром на борту пилотируемого воздушного судна, СКО по крену и тангажу не должны превышать 0,005°, по курсу - не более 0,01°.
Характеристики бортового ГНСС-приемника и инерциального измерительного устройства, используемого совместно с лидаром на борту беспилотного воздушного судна, должны соответствовать требованиям ГОСТ Р 70078-2022 (раздел 8).
Программное средство обработки бортовых ГНСС/ИИУ-измерений должно соответствовать требованиям ГОСТ Р 59328-2021 (пункт 8.2.5).
5.1.6 Требования к ПО обработки данных лазерного сканирования
Программное средство обработки данных лазерного сканирования должно иметь функциональные возможности выполнения требований ГОСТ Р 59562-2021 (пункты 9.4.2 - 9.4.11) и обеспечивать обработку, анализ, визуализацию и контроль данных, полученных с помощью системы лазерного сканирования.
Визуализация данных лазерного сканирования для анализа должна иметь формы 2D- и 3D-представления облака ТЛО различными способами: в виде интенсивности отраженного сигнала, визуализации высоты в цветовом кодировании, плотности ТЛО, цветового разделения по классам и маршрутам.
5.2.1 Если ВЛС выполняется совместно с АФС по технологической схеме комбинированной стереотопографической съемки или комбинированной аэрофотопографической съемки местности, ТЗ на аэросъемочные работы разрабатывается с учетом требований ГОСТ Р 59328-2021 (раздел 6). При выполнении ВЛС для решения иных задач в ТЗ указывается цель работ, требования к процессу и результатам ВЛС с приложением в виде перечня материалов, получаемых в результате выполнения работ.
В ТЗ должны быть приведены требования к количеству отражений, регистрируемых в процессе ВЛС. При использовании лидара с отсутствием данной опции требуется согласование с заказчиком и отражение этого условия в техническом задании.
Вариант использования лидаров без возможности регистрации интенсивности излучения также должен быть отражен в ТЗ и согласован с заказчиком.
5.2.2 Если ТЗ предусматривается выполнение классификации облака ТЛО, то должны быть представлены требования к классификации точек лазерных отражений с указанием номеров или типов классов и их описание.
5.2.3 В ТЗ должны быть указаны следующие дополнительные и/или специфические требования (в дополнение к 6.1 ГОСТ Р 59328-2021):
а) требования к параметрам ВЛС:
- протяженность маршрута за границей съемочного участка лидарной съемки, м;
- перекрытие маршрутов, %, наличие поперечного маршрута при расположении контрольных точек вне объекта съемки;
- сезонно-погодные условия для объекта лидарной съемки, условия съемки при наличии паводка;
- требования к геодезическому обеспечению съемки (системы координат и системы высот, в которых представляются ТЛО);
б) требования к качеству материалов, создаваемых на всех этапах выполнения работ:
- плотность ТЛО;
- точность определения пространственных координат ТЛО;
- виды и формат материалов ВЛС;
- состав и форма представления облака ТЛО (по маршрутам, по блокам).
5.3.1 При совмещении ВЛС с АФС проектирование ВЛС выполняют в ходе проектирования АФС в соответствии с требованиями ГОСТ Р 59328-2021 (подраздел 6.2) и дополнительными требованиями к проектированию ВЛС (5.2.3).
Параметры аэросъемки проектируют с учетом технических требований к минимальной плотности точек, точности определения их пространственного положения для конкретного вида продукции, а также с учетом технических характеристик оборудования и особенностей рельефа местности. В проекте аэросъемки должны быть учтены все требования к АФС и ВЛС. Требования к высоте полета ВС следует определять с учетом характеристик совместно используемой цифровой аэрофотокамеры в соответствии с ГОСТ Р 59328 в отношении обеспечения требуемого номинального пространственного разрешения фотоизображения.
5.3.2 Проектируемая высота съемки для используемого лазерного сканера должна обеспечивать получение ТЛО от поверхности земли с коэффициентом отражения 20% и более с требуемой точностью и плотностью.
5.3.3 Маршруты ВЛС следует проектировать в границах объекта лидарной съемки с учетом обеспечения выступающих за границы зон. Маршруты ВЛС при совместном проектировании с АФС должны выходить за границы съемочного участка в соответствии с требованиями ГОСТ Р 59328-2021 (подраздел 6.2) с учетом согласованности покрытий АФС и ВЛС. При проектировании ВЛС без АФС маршруты должны выходить за границы съемочного участка не менее чем на 20% ширины полосы сканирования.
5.3.4 Длина маршрутов L, км, должна выбираться с учетом параметров используемого ИИУ (дрейфа гироскопов), скорости воздушного судна и не должна превышать значения, рассчитанного по формуле
 , (1)
, (1)где V - скорость воздушного судна, км/ч;
G - дрейф ИИУ, мрад/ч.
5.3.5 Результатом проектирования ВЛС должны являться: положение и направление маршрутов ВЛС, высота полета воздушного судна, длина маршрутов, частота импульсов, частота сканирования, количество зон MPiA, угол сканирования лидара, тип применяемой развертки (если оборудование позволяет использовать разные типы развертки), летное время.
5.3.6 Для топографической съемки, по возможности, требуется равномерное распределение ТЛО. Сканирование следует проектировать и выполнять для получения данных о первых отражениях, которые должны быть максимально приближены к равномерному расположению точек (расстояние между соседними точками вдоль и поперек направления полета не должны отличаться более чем в два раза).
В отдельных случаях по согласованию с заказчиком допускается неравномерное в пространстве распределение ТЛО в областях с холмистым и горным рельефом, для которых поддержание равномерного распределения точек нецелесообразно или трудно реализуемо.
5.3.7 Проектирование ВЛС следует выполнять с учетом анализа областей низкой достоверности, в которых, как правило, идентификация поверхности земли на облаке ТЛО маловероятна или невозможна. Такими областями могут являться, например, густые леса, непроходимые болота, водные поверхности. В них не должно быть запланировано создание точек планово-высотной подготовки лидарной съемки, не должна проводиться оценка точности облака ТЛО. Для обеспечения требуемой проектируемой плотности ТЛО лидарной съемки следует принимать во внимание снижение плотности точек ЦМР (точек земной поверхности) относительно плотности исходного облака точек для залесенной местности с учетом требований 6.2.6 ГОСТ Р 59562-2021.
5.3.8 При проектировании ВЛС следует учитывать требования к числу отражений. Рекомендуется проводить сканирование с обеспечением не менее четырех отражений на один импульс для лидаров, устанавливаемых на ПВС и БВС (если позволяют рабочая высота съемки и характеристики оборудования).
5.3.9 Значения интенсивности должны быть записаны в LAS-формате для каждого многократного отражения.
5.3.10 При проектировании воздушного лазерного сканирования с целью топографической съемки местности плотность и точность определения координат и высот ТЛО с учетом масштаба картографирования и высоты сечения рельефа следует проектировать в соответствии с [5], приложением Г (таблицы Г.1 и Г.2) ГОСТ Р 59562-2021 и 5.1.17 и 5.1.19 СП 47.13330.2016.
5.3.11 Проектирование воздушного лазерного сканирования для определения координат объектов недвижимости следует выполнять с учетом требований [6].
5.3.12 Минимальная плотность облака ТЛО для дешифрирования и векторизации зданий и строений при создании ЦТК, ЦПГ и ЦТП, а также других объектов местности (при необходимости) должна соответствовать требованиям проводимых работ в соответствии с ГОСТ Р 59562-2021 (пункт 9.5.16), определяемым средним расстоянием между точками не более 0,5 мм в масштабе картографирования.
5.3.13 Минимальная плотность облака ТЛО, используемого с целью определения координат точек границ и контуров объектов недвижимости, создания 3D-моделей объектов и участков местности для кадастровых работ с СКП пространственных координат, не превышающей 0,1 м, с учетом 5.9 ГОСТ Р 70690-2023 должна быть не менее 100 т/м2.
5.3.14 Требования к межмаршрутному перекрытию для площадных и линейных объектов для разных видов рельефа необходимо устанавливать исходя из технических характеристик всего съемочного комплекса в целях обеспечения плотности ТЛО, исключения теней от высотных объектов, контроля качества данных ВЛС по координатной сходимости смежных маршрутов на четких контурах, обеспечения требуемого перекрытия аэрофотоснимков (в случае совместного выполнения ВЛС и АФС). Рекомендуемое поперечное перекрытие ВЛС должно составлять не менее 20% для площадных объектов. При проведении съемки линейно-протяженных объектов одним маршрутом рекомендуется увеличивать ширину полосы сканирования на 25% от границ съемочного участка (ширины объекта съемки). При ВЛС для разных видов рельефа и высотной застройки поперечное перекрытие рекомендуется проектировать по номинальным значениям проектируемых перекрытий аэрофотоснимков в соответствии с положениями ГОСТ Р 59328-2021 (приложение Б).
5.3.15 Требования к выбору воздушного судна и аппаратно-программных средств проектирования, съемки и обработки результатов ВЛС необходимо устанавливать в соответствии с положениями ГОСТ Р 71863-2024 (подразделы 5.3 и 6.1), а также положениями ГОСТ Р 56122, ГОСТ Р 59328, ГОСТ Р 70078. Условия выбора между ПВС и БВС приведены в ГОСТ Р 71863-2024 (подраздел 5.3).
Требования к пилотируемому воздушному судну должны определяться техническими особенностями используемого лидара. Могут быть использованы как негерметичные ПВС (возможность применения до высоты полета 3000 м в зависимости от наличия дополнительного оборудования), так и герметичные ПВС (возможность применения при высоте полета свыше 3000 м), со стеклянным фотолюком, требования к которому и возможность такого использования оборудования регламентируются производителем лидара. Высоту полета ВС следует выбирать исходя из соблюдения требований к плотности ТЛО и характеристик лидара. Частоту сканирования и частоту импульсов следует рассчитывать в процессе проектирования воздушного лазерного сканирования под используемое оборудование и требуемую плотность ТЛО. Примеры технических характеристик используемых аппаратных средств представлены в ГОСТ Р 71863-2024 (приложения Б, В).
5.4.1 ВЛС должно сопровождаться работами по планово-высотному геодезическому обеспечению. Эти работы должны быть выполнены в соответствии ГОСТ Р 59562-2021 (подразделы 8.1, 8.2, пункты 8.3.5, 8.3.7, 8.3.14, 8.3.15), если иное не указано в технических требованиях к ВЛС.
5.4.2 Материалы воздушного лазерного сканирования и все сопутствующие или производные данные и продукты должны быть обработаны и представлены в системе координат и системе высот, согласованной до начала выполнения работ с заказчиком и всеми исполнителями проекта. При необходимости представления результатов в местной системе координат определение параметров преобразования, связывающих систему координат ГСК с референцной системой координат, следует выполнять в соответствии с требованиями ГОСТ Р 59562-2021 (подраздел 8.4) и ГОСТ 32453-2017 (пункт 5.2).
Каждый объект ВЛС должен быть представлен в одной СК, за исключением случаев, когда объект съемки располагается в нескольких координатных зонах, а обработка в одной зоне приведет к недопустимым искажениям, не соответствующим техническим требованиям. В таких случаях объект съемки должен быть разделен на участки, соответствующие каждой из координатных зон. К участкам предъявляются следующие требования:
- каждый участок должен быть представлен как отдельный проект с собственной СК;
- для каждого участка все пространственные данные с перекрытием не менее полосы сканирования с соседней зоной должны быть представлены в одной СК.
5.4.3 Контрольные точки, определяемые в процессе геодезического обеспечения ВЛС, предназначаются для оценки точности ТЛО и могут использоваться для оценки результирующей точности конечной продукции, создаваемой с использованием материалов ВЛС.
Для оценки точности ТЛО используются контрольные точки двух видов:
- точки для оценки точности ТЛО по высоте;
- точки для оценки точности планового положения ТЛО.
5.4.3.1 Для оценки точности ТЛО по высоте контрольные точки должны размещаться на твердых ровных плоских поверхностях, расположенных на открытых участках объекта съемки, которые обычно обеспечивают одиночные отражения лазерного импульса. Не допускается размещение контрольных точек на проезжей части улиц, дворов, на перепаханной, покрытой растительностью или иным образом нарушенной земной поверхности.
На открытой твердой, ровной и плоской поверхности должен быть выбран участок прямоугольной формы размером не менее 5 x 5 м, на котором должны быть определены пространственные координаты 20 - 25 равномерно расположенных немаркированных контрольных точек, как указано в приложении А. Значение погрешности определения высот контрольных точек должно составлять не более 0,5 от СКО, заявленного в паспорте используемого лидара.
Количество участков с контрольными точками должно соответствовать количеству базовых станций, но не менее двух на объект. Места расположения участков следует выбирать максимально удаленными друг от друга, с учетом конфигурации объекта сканирования.
При съемке линейно-протяженных объектов участки с контрольными точками должны располагаться в начале и в конце полета на пересечении маршрутов и, при необходимости, на углах поворота трассы.
При отсутствии участков с требуемой поверхностью в границах объекта допускается размещение участков вне границ объекта при обязательном выполнении поперечного маршрута, проходящего через объект съемки и участок с контрольными точками.
5.4.3.2 Для оценки точности планового положения ТЛО рекомендуется размещение контрольных точек в местах, где наблюдается разница значений интенсивности, высот в облаке ТЛО (например, края дорожной разметки, угол границы газона и асфальта, угол объекта с отвесным перепадом высоты). Допускается использование специальных светоотражающих материалов для маркирования. КТ должна определяться как угол векторизованного объекта на классифицированном облаке ТЛО и однозначно дешифрироваться на сопроводительных аэрофотоснимках.
Количество КТ для оценки точности планового положения ТЛО должно соответствовать количеству базовых станций, но не менее двух на объект. Места расположения таких КТ следует выбирать на максимальном удалении друг от друга с учетом конфигурации объекта сканирования.
При отсутствии контурных точек, надежно выделяемых на классифицированном облаке ТЛО, необходима их маркировка. Форму, типы и размеры маркировки контрольных точек требуется выбирать в зависимости от метода проводимых работ и параметров лидара, рекомендаций производителя лидара, масштаба картографирования или плановой точности создаваемой продукции с учетом дивергенции лазерного луча. При этом геометрические контуры КТ должны достоверно идентифицироваться на классифицированном облаке ТЛО. Примеры рекомендуемых КТ представлены в ГОСТ Р 70689, но не ограничиваются ими.
5.4.4 Планово-высотную привязку контрольных точек выполняют путем относительных спутниковых определений от пунктов съемочной сети двухчастотным ГНСС-приемником статическим методом или иным - в зависимости от допустимой погрешности определения положения КТ, при удалении от базовой станции не более чем указано в ГОСТ Р 59562-2021 (таблица Д.1 приложения Д).
Значение погрешностей определения планового положения и высот контрольных точек не должно превышать 0,5 от СКО в плане и по высоте, заявленных в паспорте используемого лидара.
5.4.5 Количество КТ, используемых для оценки точности конечной продукции, создаваемой с использованием материалов ВЛС, и точность определения координат КТ должны соответствовать требованиям 8.3 ГОСТ Р 59562-2021, а именно: средние погрешности определения планового положения не должны превышать значения 0,1 мм в масштабе карты (плана) и 1/5 допускаемой погрешности координат определяемых характерных точек границ и контуров объектов недвижимости. Средние погрешности высот контрольных точек не должны превышать 1/10 высоты сечения рельефа и 1/2 допускаемой погрешности координат определяемых характерных точек границ и контуров объектов недвижимости.
5.5.1 Воздушное лазерное сканирование следует выполнять с учетом требований [3].
5.5.2 При проведении воздушного лазерного сканирования совместно с аэрофотосъемкой методика выполнения работ должна соответствовать ГОСТ Р 59562 и ГОСТ Р 59328-2021 (подраздел 8.1).
5.5.3 ВЛС должно выполняться в отсутствие атмосферных осадков (дождя, тумана, снега). Допускается выполнение ВЛС в облачную погоду, если высота полета ниже высоты облаков, а также в ночное время, если предполагаемый проект не требует сбора и использования данных аэрофотосъемки.
На земной поверхности не должно быть сезонного снежного покрова (за исключением многолетних снегов - "фирновых полей"), если иное не оговорено техническими требованиями.
5.5.4 Перед началом выполнения ВЛС объекта должны быть определены параметры редукции фазового центра антенны бортового ГНСС-приемника в соответствии с ГОСТ Р 59328-2021 (подраздел 7.1) и калибровочные параметры воздушного лазерного сканера, полученные в результате выполнения калибровочного полета, если в руководстве к лидару содержатся требования его выполнения и определена периодичность и методика калибровки. Условия выполнения калибровочного полета приведены в ГОСТ Р 59328-2021 (подраздел 7.3).
5.5.5 Для выполнения ВЛС могут использоваться как пилотируемые, так и беспилотные воздушные суда, которые должны соответствовать требованиям положений ГОСТ Р 59328 и ГОСТ Р 70078.
5.5.6 Воздушное лазерное сканирование может выполняться как со специализированных аэрофотосъемочных самолетов, так и с оснащаемых аэросъемочным оборудованием многоцелевых самолетов и вертолетов, находящихся на эксплуатации в гражданской авиации.
5.5.7 В процессе предполетной подготовки ВЛС следует:
- убедиться в отсутствии загрязнений на защитном стекле лидара, в готовности ГНСС/ИИУ в соответствии с руководством по эксплуатации системы воздушного лазерного сканирования лидара;
- выполнить процедуру наземного тестирования (проверку настроек режимов ВЛС, параметров редукции лидара).
Перед началом ВЛС и по его завершении необходимо выполнить инициализацию лидара в соответствии с рекомендациями производителя, а также ГОСТ Р 59328-2021 (пункт 8.1.5). Инициализацию необходимо выполнять при благоприятных условиях приема спутниковых сигналов и вдали от возможных источников электромагнитного излучения.
5.5.8 Воздушное лазерное сканирование должно выполняться при соблюдении следующих требований:
- частота записи спутниковых статистических измерений базовых станций должна быть не менее 10 Гц;
- высота полета не должна отличаться от заданной более чем на 5%;
- боковое отклонение траектории ВС от линии маршрута не должно превышать 10% от высоты полета ВС. В случае образования участка земной поверхности без ТЛО вследствие бокового отклонения должна быть выполнена повторная съемка этого участка;
- количество видимых спутников ГНСС должно быть не менее шести при значении PDOP не более 4 (маршрутные линии, на которых эти показатели превышают пороговые значения, должны быть сняты повторно).
5.6.1 Исходными данными для обработки материалов ВЛС являются:
- лидарные данные, записанные на бортовые носители информации;
- данные ГНСС/ИИУ-измерений, записанные на бортовые носители информации;
- данные ГНСС-измерений на базовых станциях;
- служебные файлы с параметрами системы лазерного сканирования;
- калибровочные параметры лидара, полученные в результате калибровочного полета.
Результатом обработки данных ВЛС должны являться:
- уравненное классифицированное облако ТЛО;
- результаты обработки ГНСС/ИИУ-измерений;
- иные данные и документы, предусмотренные требованиями ТЗ, предоставляемые в результате воздушного лазерного сканирования.
5.6.2 Процессы послеполетной обработки данных ВЛС должны соответствовать 6.6.1 ГОСТ Р 71863-2024 и должны включать:
- обработку данных калибровочного полета и определение параметров калибровки лидара, если таковой выполнялся;
- входной контроль (проверка целостности и корректности записи данных лидара и бортовых ГНСС/ИИУ-измерений);
- обработку ГНСС/ИИУ-измерений;
- обработку исходных лидарных данных с использованием полученных параметров калибровки и результатов ГНСС/ИИУ-измерений, формирование файлов ТЛО в LAS/LAZ формате.
5.6.3 Процессы первичной обработки данных ВЛС должны включать:
- объединение ТЛО съемочных маршрутов в единое облако ТЛО;
- классификацию облака ТЛО;
- контроль точности ТЛО по расхождениям в межмаршрутных перекрытиях;
- уравнивание данных ТЛО многомаршрутной съемки;
- контроль точности в плане и по высоте ТЛО по контрольным геодезическим и/или фотограмметрическим (при их наличии) точкам;
- контроль плотности ТЛО;
- контроль полноты покрытия территории объекта съемки ТЛО;
- преобразование облака ТЛО в систему координат и высот, экспорт в формат, определяемый техническими требованиями к создаваемой продукции;
- формирование отчета о выполнении лазерного сканирования в виде текстового файла;
- подготовку комплекта материалов, передаваемых в камеральную обработку.
5.6.4 Послеполетную обработку исходных лидарных данных с формированием ТЛО в системе координат ITRF или иной, указанной в ТЗ, следует выполнять в специальном ПО производителя лидара.
5.6.4.1 Обработку данных калибровочного полета и определение параметров калибровки лидара следует выполнять в соответствии с ГОСТ Р 59562-2021 (пункт 9.4.2).
5.6.4.2 Исходными данными для обработки ГНСС/ИИУ-измерений являются:
- координаты БС в системе координат ITRF, система высот геодезическая/над эллипсоидом ITRF;
- "сырые" файлы спутниковых наблюдений на базовых станциях в RINEX-формате;
- полевые журналы;
- схема развития сети БС;
- бортовые данные ГНСС и ИИУ в формате используемого оборудования.
5.6.4.3 При использовании базовых станций расчет положения ВС выполняется в специальном ПО на основе дифференциального метода обработки ГНСС-измерений. Метод PPP используется в случае выполнения ВЛС без базовых станций. При использовании метода PPP для обработки бортовых спутниковых измерений общая продолжительность бортовых ГНСС-измерений должна быть не менее 50 мин.
5.6.4.4 Точность вычисленного положения ВС должна определяться по разности в пространственном положении между результатами прямого и обратного решений (разность на участках траектории, совпадающих со съемочными маршрутами, не должна превышать 0,1 м для дифференциального метода и 0,2 м для метода PPP).
5.6.4.5 В результате обработки ГНСС/ИИУ-измерений в программном обеспечении должны формироваться графики (приложение Б) и/или текстовые отчеты по качеству обработки ГНСС/ИИУ-измерений:
- разность положения ВС при прямом и обратном решениях;
- среднеквадратическое отклонение положения ВС;
- разность положения ВС по углам ориентации (курс, крен, тангаж) между результатами прямого и обратного решения.
5.6.4.6 В результате послеполетной обработки в специальном ПО производителя лидара должно быть сформировано облако ТЛО в формате LAS/LAZ. Время в файле LAS/LAZ должно записываться как скорректированное время сигналов ГНСС: стандартное (спутниковое) время сигналов ГНСС минус 1·109 с точностью, достаточной для обеспечения уникальных временных меток для каждой ТЛО.
5.6.5 Первичная обработка выполняется с помощью специальных программных продуктов, удовлетворяющих требованиям 5.1.5.
5.6.5.1 Классификация ТЛО включает процессы присвоения номеров и типов классов точкам лазерных отражений и удаления отдельных точек или групп точек, находящихся заведомо ниже земной поверхности или "висящих" в воздухе при отсутствии рядом высотных объектов местности. При необходимости после автоматической классификации проводится ручная корректировка.
5.6.5.2 При классификации точек используется перечень классов для отнесения к ним ТЛО, приведенный в таблице В.1 приложения В. ТЛО должны быть классифицированы по классам, достаточным для обработки данных ВЛС и последующего применения, например, класс "земля" для создания ЦМР, класс "здания" для определения координат объектов. Дополнительные классы могут использоваться в конкретных проектах по согласованию с заказчиком.
Коды классификации ТЛО не должны использоваться вместо битового флага перекрытия для идентификации точек перекрытия. Классификация ТЛО должна быть единообразной для всего проекта.
5.6.5.3 Контроль точности ТЛО по разности высот между маршрутами проводят на твердых открытых поверхностях (двускатные крыши, участки местности без растительности и т.п.) с уклоном не менее 10°. К выбору контролируемых поверхностей предъявляются следующие требования:
- включение в контроль всех зон перекрытий от смежных и пересекающихся маршрутов;
- равномерное распределение контролируемых поверхностей по всей ширине и длине каждой зоны перекрытия маршрутов;
- отсутствие растительности (открытая местность, городские территории);
- удаление контролируемой поверхности на расстояние не менее трех метров от любых вертикальных объектов или резких перепадов высоты;
- при использовании склонов обязателен их постоянный уклон;
- количество контролируемых поверхностей должно быть не менее трех в каждом полете и не менее двух в зоне перекрывающихся полетов.
5.6.5.4 Оценку точности по высоте между маршрутами следует выполнять в соответствии с методикой, представленной в приложении Г.
По результатам контроля точности ТЛО по расхождениям в межмаршрутных перекрытиях выполняется уравнивание ТЛО всех съемочных полетов, если среднее значение расхождений между маршрутами не превышает 1,4 значения допустимой средней погрешности съемки рельефа в соответствии с ГОСТ Р 59562-2021 (приложение В). Если расхождение превышает это значение, следует выполнить дополнительную калибровку системы лазерного сканирования.
Карты-схемы границ областей, на которых выполнялась оценка точности, в виде векторного файла должны быть переданы заказчику.
5.6.5.5 Оценка точности определения высоты ТЛО должна выполняться по точкам контрольных участков (5.4.3.1) до и после уравнивания ТЛО между маршрутами и/или других операций по изменению положения ТЛО, а также перед передачей ТЛО в камеральную обработку. Оценка выполняется средствами специального программного обеспечения после фильтрации выпадающих и случайных отдельных и групповых точек на контролируемом участке по TIN-модели, вершинами которой являются ТЛО класса "земля", и контрольным точкам ровной (гладкой) поверхности в соответствии с методикой, представленной в приложении Д.
СКО определения высоты ТЛО должна соответствовать заявленной точности лидара (5.1.2) и не должна превышать значений допустимых СКП съемки рельефа в соответствии с ГОСТ Р 59562-2021 (приложение В) при использовании лазерного сканирования в целях картографирования.
Результаты оценки точности определения высотного положения ТЛО по контрольным точкам с подробным описанием метода проверки должны быть приведены в техническом отчете.
5.6.5.6 Оценку точности планового положения ТЛО следует выполнять с использованием соответствующих контрольных точек (5.4.3.2). При невозможности идентификации КТ по интенсивности оценку планового положения ТЛО следует выполнять по данным, имеющим более высокую точность и детальность (стереоскопические модели, ортофотопланы, цифровые крупномасштабные топографические планы, данные инженерных съемок, тест-объекты из состава эталонных пространственных полигонов). При отсутствии такой возможности следует выполнять в полевых условиях определение положения четких контуров, которые могут быть идентифицированы по облаку ТЛО (угол здания, контур надземного трубопровода, угол забора и т.п.).
СКО определения планового положения ТЛО должно соответствовать заявленной точности лидара (5.1.2) и требованиям [6] при выполнении ВЛС для целей определения координат объектов недвижимости, а при выполнении ВЛС в целях картографирования - соответствовать требованиям [5].
5.6.6 Контроль плотности облака ТЛО на объекте съемки выполняется средствами специального программного обеспечения по ТЛО на неперекрывающихся с соседними маршрутами участках на ровных твердых поверхностях, имеющих одно единственное отражение.
Для этого используются первые (если иное не оговорено заказчиком) отражения в случае регистрации нескольких отражений, которые должны быть расположены в средней части полосы сканирования.
5.6.7 По результатам первичной обработки данных воздушного лазерного сканирования должен быть выполнен контроль полноты покрытия объекта съемки точками лазерных отражений. Пропуском данных ТЛО считается площадь, превышающая или равная площади квадрата со стороной, равной четырехкратному допустимому среднему расстоянию между ТЛО. Пропуски данных в пределах одного маршрута съемки недопустимы, за исключением следующих случаев:
- наличие водоемов;
- наличие зеркальных поверхностей (глянцевая черепичная кровля здания, стеклянная поверхность теплицы и т.п.);
- наличие лидарной тени от зданий или других объектов, в том числе от выбросов в атмосферу производственных дымов предприятий;
- пропуск заполнен данными с другого маршрута ВЛС.
5.6.8 Файлы с данными облаков ТЛО должны быть записаны на цифровой носитель в формате LAS, версия не ниже 1.4-R15, если иное не указано в ТЗ.
5.6.9 Дублирование лидарных точек (X, Y, Z и отметка времени) по результатам первичной обработки ТЛО не допускается.
5.6.10 Схема наименования файлов должна быть одинаковой внутри одного объекта ВЛС. Названия для каждого файла должны быть уникальными внутри одного проекта.
Данные сканирования могут быть представлены по маршрутам. Для однозначного определения маршрутов в названии файла должно быть указано: идентификатор проекта, номер маршрута, отметка времени (UTC+0), дата съемки.
Пример - ORB_035_030557_20220505.las
При необходимости данные могут быть представлены по блокам одинаковой формы (предпочтительно квадратной) и размера в произвольной разграфке. Размер блока зависит от объема данных и используемых технических средств для работы с данными. Название файла блока может состоять из: идентификатора проекта, порядкового номера блока.
Пример - ORB_000001.las
Техническими требованиями могут определяться иные варианты представления данных сканирования. Границы блоков в виде векторного файла должны быть переданы заказчику в качестве приложения к отчету.
5.7.1 Первичные данные ВЛС и/или производные конечные материалы должны быть представлены заказчику в полном объеме, в соответствии с техническими требованиями, включая указанные в 5.7.1.1, 5.7.1.2.
5.7.1.1 Материалы по геодезическому обеспечению в соответствии с перечислением 2 раздела 12 ГОСТ Р 59562-2021, в том числе:
- каталоги координат пунктов съемочной сети (базовых станций) в системе координат ITRF и требуемой системе координат и высот с информацией о выполненных преобразованиях координат и высот;
- каталоги координат контрольных точек в системе координат ITRF и требуемой системе координат и высот;
- файлы абрисов и описаний КТ.
- файл ТЛО в формате LAS в требуемой системе координат и высот в соответствии с ТЗ. Допускается использование других версий формата LAS и других выходных форматов продукции ВЛС по согласованию с заказчиком, что отражается в ТЗ и перечне выходной продукции. Значения интенсивности, записанные в файлах формата LAS, должны быть нормализованы до 16 бит, как того требует спецификация LAS. Нормализация интенсивности должна быть строго линейной;
- файл с результатами обработки ГНСС/ИИУ-измерений по каждому полету в ПО производителя;
- сертификат калибровки или иной документ в соответствии с 5.1.1;
- файл с материалами аэрофотосъемки при их совместном использовании с системами лазерного сканирования;
- карты-схемы границ объекта съемки и схемы покрытий ВЛС в согласованном ГИС-формате с описанием в виде метаданных, схема блоков ВЛС в согласованном ГИС-формате с описанием имен файлов блоков ВЛС;
- технический отчет;
- метаданные в формате XML.
5.7.2 Описание метаданных передаваемых результатов ВЛС может содержать (но не ограничивается этим):
- название (шифр) объекта ВЛС;
- субъект Российской Федерации, район, населенный пункт;
- номер контракта и дату;
- организацию-заказчика;
- организацию-исполнителя;
- количество маршрутов;
- носитель данных и общий объем данных ВЛС;
- систему координат и проекцию;
- порядок формирования блоков (разделение по границе объекта съемки из ЕГРН, по разграфке карты/плана, произвольный, без разделения);
- номер или наименование блока;
- название и формат записи файлов ВЛС;
- дату съемки ВЛС;
- сведения о классификации ТЛО;
- программно-аппаратные средства проектирования, выполнения и обработки ВЛС;
- фактические параметры ВЛС и характеристики лидара (плотность ТЛО, межмаршрутные перекрытия, СКП координат и высот ТЛО, частота сканирования, частота импульсов, количество отражений, вид оптической развертки сканера, дивергенция и другие параметры в зависимости от модели лидара).
5.7.3 Технический отчет о выполнении воздушного лазерного сканирования должен включать разделы в соответствии с ГОСТ Р 59562-2021 (раздел 11).
Дополнительно в технический отчет должны быть включены:
а) общие сведения, включая любые сведения, возникшие в ходе выполнения ВЛС и обработки данных, которые привели к отклонениям от требований к результатам ВЛС, например:
- неблагоприятные условия окружающей среды (сильное задымление, снегопад, затопление, плотный растительный покров);
- особенности сбора данных (изменения условий полета, помехи ГНСС/ИИУ-измерений);
- ссылки на любые вспомогательные файлы, такие как файлы с площадными объектами области низкой достоверности, которые используются для определения отклонения данных ВЛС от проектных;
б) сведения по геодезическому обеспечению - в соответствии с разделом 11.7 ГОСТ Р 59562-2021;
в) сведения по обработке ГНСС/ИИУ-измерений:
- описание процесса обработки с указанием используемого ПО;
- схема траекторий ВС с обозначением на ней местоположения БС для каждого полета (если траектория вычислялась методом PPP, то без отображения БС);
- схема местоположений БС на весь проект;
- графики по результатам обработки ГНСС/ИИУ-измерений на каждый полет - такие, как: разность в пространственном и угловом положении между результатами прямого и обратного решений, линейная и угловая точность и любые другие графики, подтверждающие результат обработки и соблюдение технических требований;
г) сведения по формированию облаков точек:
- описание процесса обработки данных лидара с использованием вычисленной траектории движения ВС;
- указание используемого формата данных облаков ТЛО и версии формата;
- система координат и высот ТЛО;
- иные материалы, отражающие результат обработки ТЛО;
д) сведения о точности определения пространственных координат ТЛО:
- сведения о поверке лидара;
- отчет о калибровке системы в случае, если предусмотрена руководством по эксплуатации и выполнялась;
- методика и результаты оценки точности ТЛО;
- оценка плотности ТЛО;
- картограмма границ объекта съемки, содержащая информацию о воздушном лазерном сканировании в ГИС-формате на весь проект, с информацией для каждого маршрута:
- название маршрута, который должен соответствовать названию файла облака ТЛО (строковое поле);
- тип маршрута: калибровочный, поперечный или иной другой (строковое поле);
- время начала сканирования;
- время окончания сканирования;
е) сведения о техническом контроле полевых и камеральных работ (заключение о приемке и контроле качества продукции, акт технического контроля):
- результаты контроля полноты покрытия съемочных участков, обеспечение границ съемочных участков;
- результаты контроля комплектности материалов и правильности их оформления;
- результаты контроля точности материалов воздушного лазерного сканирования.
5.7.4 Акт технического контроля ВЛС должен содержать:
- наименование контракта или производственного задания;
- перечень отчетных материалов, проверенных в процессе контроля;
- перечень использованных нормативных документов;
- критерии оценки результатов выполненных работ на соответствие объема, состава, комплектности и качества требованиям технического задания и нормативных документов;
- объем выполненных работ;
- информацию о выявленных несоответствиях в виде ведомости с критериями проверки данных, отметками о соответствии, выводом о соответствии данных;
- заключение о соответствии отчетных материалов техническим требованиям.
5.7.5 В технический отчет включают информацию об использованном составе технических и программных средств на всех этапах выполнения работ.
(рекомендуемое)
ТОЧЕК ЛАЗЕРНЫХ ОТРАЖЕНИЙ ПО ВЫСОТЕ
На рисунке А.1 показан пример расположения контрольных точек для оценки точности ТЛО по высоте.
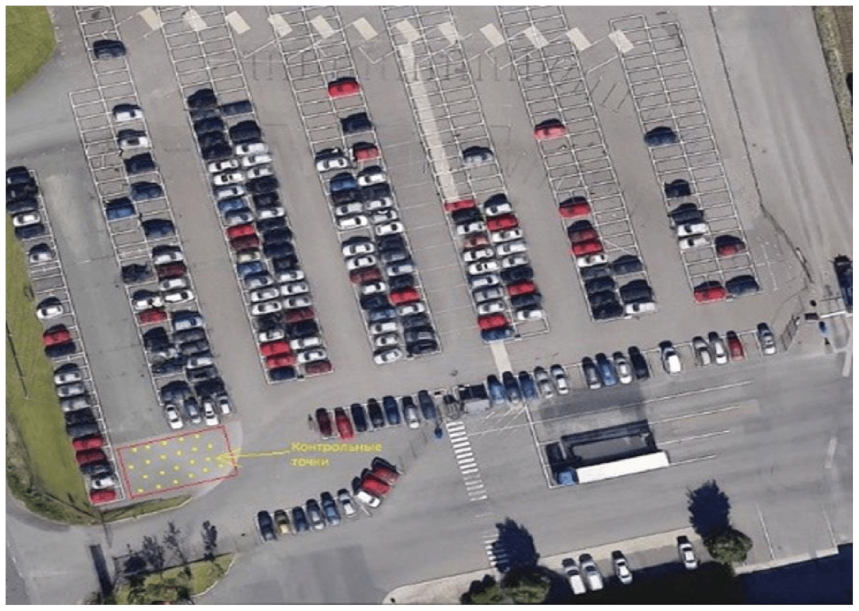
для оценки точности ТЛО по высоте
Рекомендуемый участок с контрольными точками может использоваться для оценки точности ТЛО по высоте при работах по картографированию в масштабах 1:500 - 1:10 000 и по определению координат характерных точек границ и контуров объектов недвижимости.
(справочное)
ВОЗДУШНОГО СУДНА
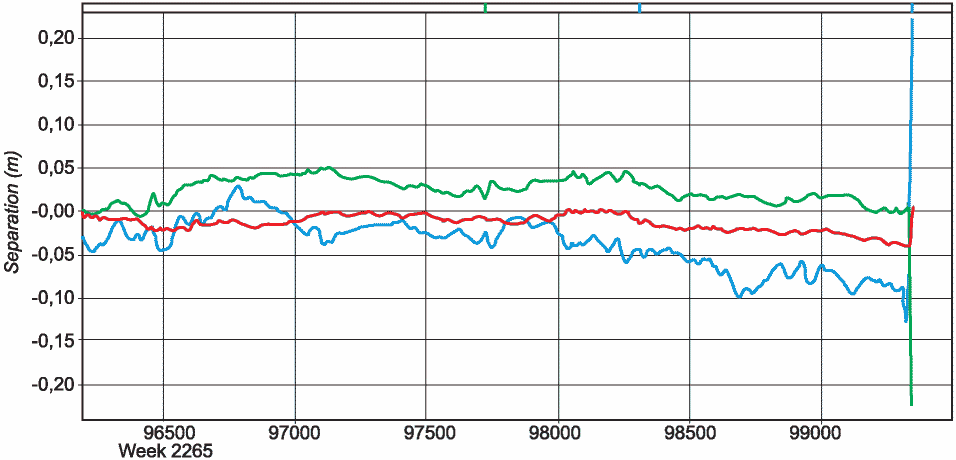
 - разность положения ВС по координате H при прямом и обратном решениях;
- разность положения ВС по координате H при прямом и обратном решениях; - разность положения ВС по координате X при прямом и обратном решениях;
- разность положения ВС по координате X при прямом и обратном решениях; - разность положения ВС по координате Y при прямом и обратном решениях;
- разность положения ВС по координате Y при прямом и обратном решениях;96500 - 99000 - стандартное (спутниковое) время сигналов ГНСС (неделя 2265)
Рисунок Б.1 - Пример графиков обработки данных траектории
полета воздушного судна. Разность координат прямого
и обратного решений (м)
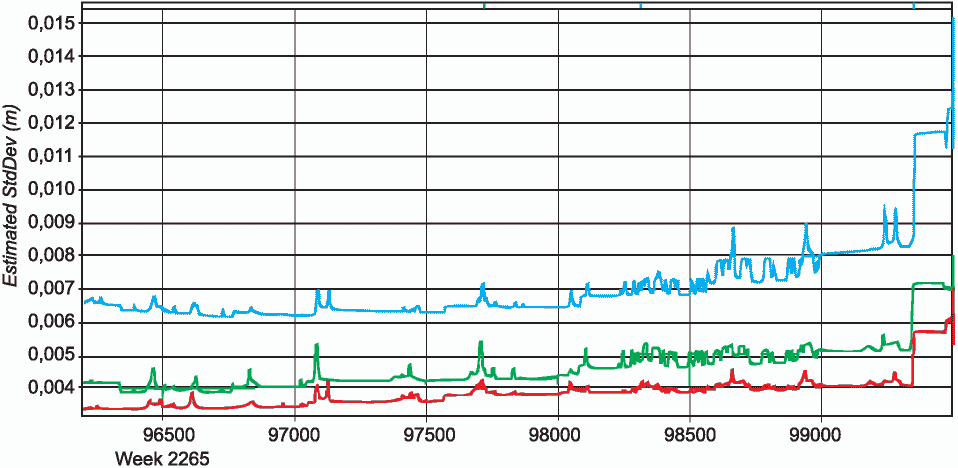
 - среднеквадратическое отклонение положения ВС по координате H;
- среднеквадратическое отклонение положения ВС по координате H; - среднеквадратическое отклонение положения ВС по координате X;
- среднеквадратическое отклонение положения ВС по координате X; - среднеквадратическое отклонение положения ВС по координате Y;
- среднеквадратическое отклонение положения ВС по координате Y;96500 - 99000 - стандартное (спутниковое) время сигналов ГНСС (неделя 2265)
Рисунок Б.2 - Пример графиков обработки данных траектории
полета воздушного судна. Среднеквадратическое отклонение
положения ВС (м)
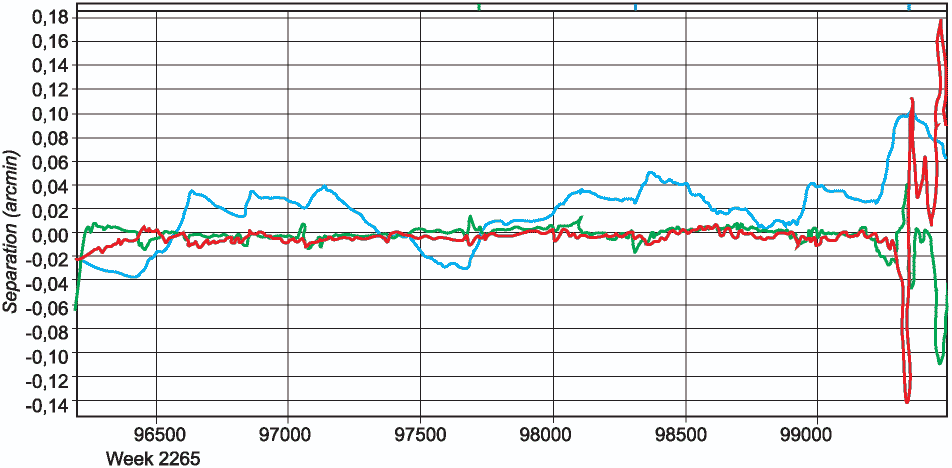
 - разность положения ВС по углу курса при прямом и обратном решениях;
- разность положения ВС по углу курса при прямом и обратном решениях; - разность положения ВС по углу крена при прямом и обратном решениях;
- разность положения ВС по углу крена при прямом и обратном решениях; - разность положения ВС по углу тангажа при прямом и обратном решениях;
- разность положения ВС по углу тангажа при прямом и обратном решениях;96500 - 99000 - стандартное (спутниковое) время сигналов ГНСС (неделя 2265)
Рисунок Б.3 - Пример графиков обработки данных траектории
полета воздушного судна. Разность углового положения ВС
при прямом и обратном решениях (угловые минуты)
(рекомендуемое)
ПЕРЕЧЕНЬ КЛАССОВ ТОЧЕК ЛАЗЕРНЫХ ОТРАЖЕНИЙ
Таблица В.1
Класс | Описание |
1 | Обработано, но не классифицировано |
2 | Земля |
3 | Строения |
(рекомендуемое)
ПО ВЫСОТЕ МЕЖДУ МАРШРУТАМИ
Для оценки точности по высоте (расхождениям высот) между ТЛО смежных маршрутов следует выбрать в классе "строения" объекты с уклонами в виде двухскатной крыши с плоской ровной поверхностью. На поверхности с уклонами строится профиль шириной, в 3 - 5 раз превышающей среднее расстояние между ТЛО, как показано на рисунке Г.1.
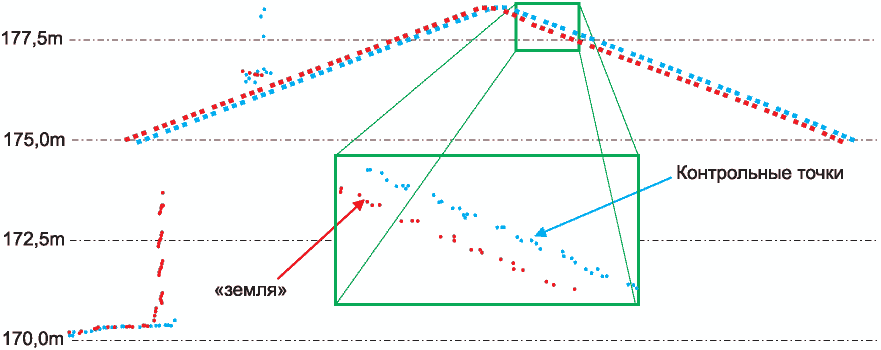
Рисунок Г.1 - Расхождение по высоте между ТЛО смежных
маршрутов ВЛС на участке ровной поверхности
Вычисление погрешности расхождения положения ТЛО по высоте между маршрутами выполняется средствами специального ПО. Среднее значение расхождений между маршрутами не должно превышать допустимой средней погрешности съемки рельефа в соответствии с ГОСТ Р 59562-2021 (приложение В).
(рекомендуемое)
ПО КОНТРОЛЬНЫМ ТОЧКАМ
Для оценки точности определения высоты ТЛО по контрольным точкам выбирается участок плоской, ровной, твердой поверхности с контрольными точками в соответствии с 5.4.3.1 и как показано на рисунке А.1 приложения А.
Погрешность определения высот ТЛО оценивается средствами специального ПО обработки лидарных данных методом сравнения высот контрольных точек относительно TIN-модели, построенной по классу "земля", как показано на рисунке Д.1.
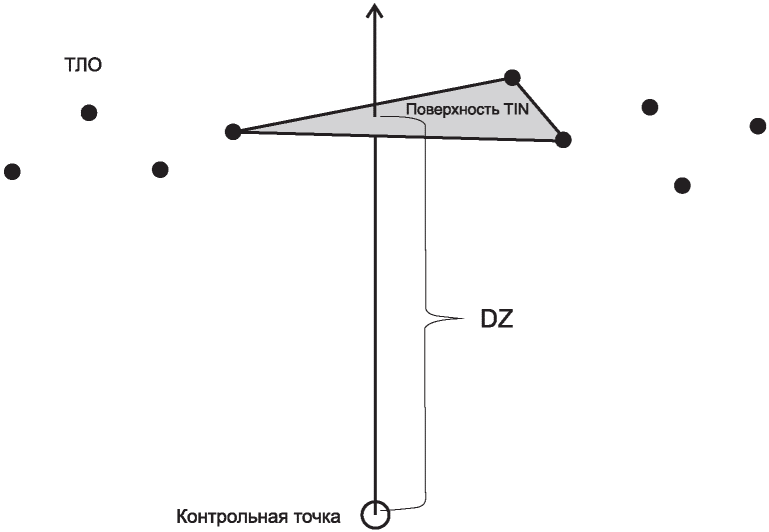
Рисунок Д.1 - Измерение разности высот DZ
между контрольными точками и поверхностью TIN-модели
Пример оценки точности высотного положения точек лазерных отражений по контрольным точкам приведен на рисунке Д.2.
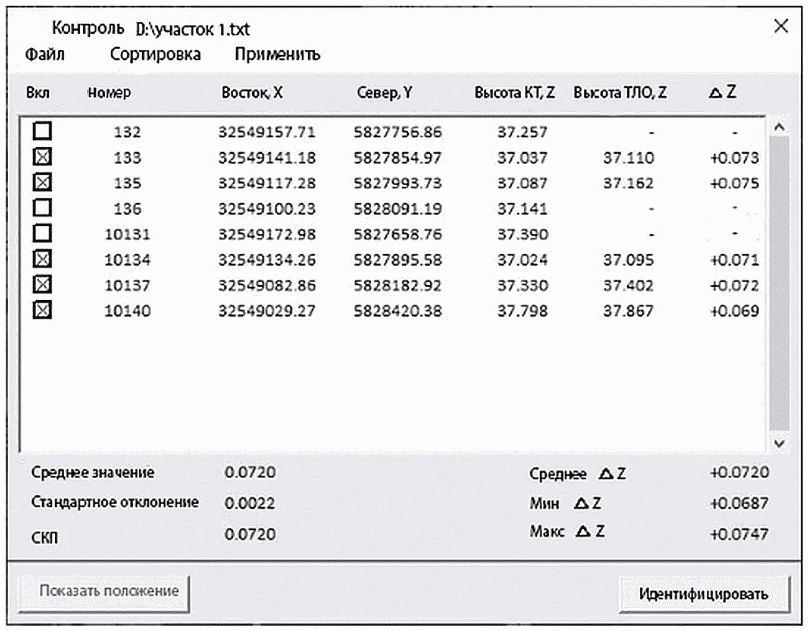
Рисунок Д.2 - Экранное отображение таблицы оценки точности
высотного положения ТЛО
Федеральный закон от 30 декабря 2015 г. N 431-ФЗ "О геодезии, картографии и пространственных данных и о внесении изменений в отдельные законодательные акты Российской Федерации" | |
Федеральный закон от 26 июня 2008 г. N 102-ФЗ "Об обеспечении единства измерений" | |
Постановление Правительства Российской Федерации от 11 марта 2010 г. N 138 "Об утверждении Федеральных правил использования воздушного пространства Российской Федерации" (ред. от 2 декабря 2020 г.) | |
[4] | Постановление Правительства Российской Федерации от 16 ноября 2020 г. N 1847 "Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений (с изменениями и дополнениями) |
Приказ Минэкономразвития России от 6 июня 2017 г. N 271 "Об утверждении требований к государственным топографическим картам и государственным топографическим планам, включая требования к составу сведений, отображаемых на них, к условным обозначениям указанных сведений, требования к точности государственных топографических карт и государственных топографических планов, к формату их представления в электронной форме, требований к содержанию топографических карт, в том числе рельефных карт" | |
Приказ Федеральной службы государственной регистрации, кадастра и картографии от 23 октября 2020 г. N П/0393 "Об утверждении требований к точности и методам определения координат характерных точек границ земельного участка, требований к точности и методам определения координат характерных точек контура здания, сооружения или объекта незавершенного строительства на земельном участке, а также требований к определению площади здания, сооружения, помещения, машино-места" | |
Постановление Правительства Российской Федерации от 3 ноября 2016 г. N 1131 (ред. от 17 августа 2022 г.) "Об утверждении Правил создания и обновления единой электронной картографической основы" |
УДК 528.71:006.354 | ОКС 07.040 |
Ключевые слова: фототопография, воздушное лазерное сканирование, воздушное судно, съемочная система, облако точек лазерных отражений | |