СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ введен в действие с 01.02.2025 на период до 01.02.2028 (Приказ Росстандарта от 28.12.2024 N 129-пнст).
Название документа
"ПНСТ 996-2024. Предварительный национальный стандарт Российской Федерации. Информационные технологии. Интернет вещей. Сети связи интернета вещей. Протокол низкоскоростного обмена данными по спутниковым каналам связи. Часть 2. Протокол низкоскоростного обмена данными для систем интернета вещей реального времени на основе протокола LoRaWAN"
(утв. и введен в действие Приказом Росстандарта от 28.12.2024 N 129-пнст)
"ПНСТ 996-2024. Предварительный национальный стандарт Российской Федерации. Информационные технологии. Интернет вещей. Сети связи интернета вещей. Протокол низкоскоростного обмена данными по спутниковым каналам связи. Часть 2. Протокол низкоскоростного обмена данными для систем интернета вещей реального времени на основе протокола LoRaWAN"
(утв. и введен в действие Приказом Росстандарта от 28.12.2024 N 129-пнст)
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 28 декабря 2024 г. N 129-пнст
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ
ИНТЕРНЕТ ВЕЩЕЙ
СЕТИ СВЯЗИ ИНТЕРНЕТА ВЕЩЕЙ.
ПРОТОКОЛ НИЗКОСКОРОСТНОГО ОБМЕНА
ДАННЫМИ ПО СПУТНИКОВЫМ КАНАЛАМ СВЯЗИ
ЧАСТЬ 2
ПРОТОКОЛ НИЗКОСКОРОСТНОГО ОБМЕНА ДАННЫМИ ДЛЯ СИСТЕМ
ИНТЕРНЕТА ВЕЩЕЙ РЕАЛЬНОГО ВРЕМЕНИ НА ОСНОВЕ
ПРОТОКОЛА LoRaWAN
Information technology. Internet of things.
IoT communication networks. Protocol for low-speed data
exchange over satellite communication channels. Part 2.
Low-speed data exchange protocol for real-time Internet
of Things systems based on the LoRaWAN protocol
ПНСТ 996-2024
ОКС 35.020
Срок действия
с 1 февраля 2025 года
до 1 февраля 2028 года
1 РАЗРАБОТАН Федеральным государственным бюджетным учреждением "Ордена Трудового Красного Знамени Российский научно-исследовательский институт радио имени М.И. Кривошеева"
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 194 "Кибер-физические системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 декабря 2024 г. N 129-пнст
4 В настоящем стандарте реализованы требования Положения о порядке создания, производства и эксплуатации (применения) ракетных и космических комплексов (РК-11-КТ)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 105064 Москва, ул. Казакова, д. 16, email: info@niir.ru, и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д. 10, стр. 2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Настоящий стандарт определяет протокол низкоскоростного обмена данными в низкоорбитальной спутниковой сети для систем интернета вещей (ИВ) реального времени (РВ). Ключевой основой типового технического решения для систем ИВ РВ является условие бесшовной работы низкоскоростной спутниковой сети и наземных сетей, в том числе энергоэффективных сетей дальнего радиуса действия (LPWAN), что подразумевает идентичность технических параметров абонентских средств потребителей (стационарных и мобильных), функционирующих в том числе в составе беспилотных и роботизированных средств в режиме реального времени, и использование полос радиочастот на совместной основе, если это предусмотрено в системе. Нормативные технические параметры абонентских средств потребителей, функционирующих в режиме реального времени (АСП РВ), являются исходными для их аналогов в спутниковой сети систем ИВ РВ, если используется совместная полоса радиочастот.
Он является вторым из группы стандартов, устанавливающих требования к структуре, формату и правилам применения протокола низкоскоростного обмена данными по спутниковым каналам связи применительно к системам ИВ с учетом достижения реакции на событие, максимально близкое к реальному времени.
В данном стандарте представлены рекомендации по адаптации технологии и протокола LoRa/LoRaWAN для обработки информации в спутниковой системе ИВ РВ, в которой временные требования к ее реакции на процессы контроля и управления внешними по отношению к ней объектами известны (заданы) и соблюдается режим обработки информации в темпе, соизмеримом со скоростью протекания (изменения) этих процессов, свойственной этим объектам.
Взаимодействие между АСП РВ и низкоорбитальными спутниками осуществляется по абонентским радиолиниям  , которые имеют множество частотных каналов, обеспечивающих требуемую емкость и энергетику радиолиний.
, которые имеют множество частотных каналов, обеспечивающих требуемую емкость и энергетику радиолиний.
, которые имеют множество частотных каналов, обеспечивающих требуемую емкость и энергетику радиолиний.Низкоскоростная сеть спутниковой связи на основе многоспутниковой низкоорбитальной группировки для предоставления услуг ИВ РВ имеет ряд специфических технических особенностей:
- объем трафика от АСП РВ в направлении КА  существенно превышает трафик в обратном направлении
существенно превышает трафик в обратном направлении  ;
;
существенно превышает трафик в обратном направлении ;- проявляется выраженный эффект Доплера (статический и динамический) даже для стационарных АСП РВ в процессе сеанса связи;
- изменение энергетики радиолиний между КА и АСП РВ происходит очень быстро и может достигать десятка дБ за время сеанса связи;
- задержка распространения пакетов существенно изменяется за время сеанса связи и зависит не только от физического расстояния радиолинии, но и от эквивалентной скорости абонентского канала, объема транслируемого пакета и времени обработки пакетов;
- частотный план абонентских линий полезной нагрузки (ПН) КА должен изменяться в зависимости от обслуживаемого региона Земли для соблюдения требований национальных администраций связи.
Критическим параметром, который в первую очередь следует принять во внимание при проектировании и создании низкоскоростной сети спутниковой связи для предоставления услуг ИВ РВ, является значение круговой задержки (RTT, round-trip-time). Значение RTT является суммой времени, необходимого для передачи данных на маршруте от АСП РВ до сетевого сервера и времени, необходимого для передачи пакета команды управления от сетевого сервера до АСП РВ. Значение RTT должно быть минимизировано в низкоскоростной сети спутниковой связи для предоставления услуг ИВ РВ (в том числе с учетом рекомендаций [1]). Для автоматизированного обслуживания высокомобильных беспилотных воздушных судов рекомендуется RTT не более 200 мс для линии C2 с учетом обработки информации и принятия решения.
При этом должна быть обеспечена высокая надежность (P) обмена данными в системах ИВ РВ. В зависимости от типа и функционального назначения системы значение P рекомендуется принять в пределах от 0,99 до 0,999 за время его обслуживания.
Настоящий стандарт устанавливает требования к структуре, формату и правилам применения протокола низкоскоростного обмена данными по абонентским линиям спутниковых каналов связи в системах интернета вещей (ИВ) реального времени (РВ), реализуемых на основе низкоорбитальных многоспутниковых группировок, и распространяется на сетевую инфраструктуру для предоставления услуг ИВ с прямым подключением абонентских средств потребителей, функционирующих в режиме реального времени (АСП РВ). Данный стандарт не распространяется на фидерные линии этих систем.
Целью настоящего стандарта является предоставление технических рекомендаций для скоординированной разработки архитектуры системы, сетевой инфраструктуры и типовых АСП РВ для предоставления услуг ИВ РВ на основе низкоорбитальной спутниковой системы (НСС), интегрированной с наземными сетями, в том числе для предоставления бесшовных услуг ИВ РВ при использовании унифицированных АСП РВ.
Областью применения представленного в настоящем стандарте протокола связи, устойчивого к эффекту Доплера, является обмен данными в режиме реального времени между оконечными устройствами высокомобильных объектов ИВ (приборами, датчиками, исполнительными устройствами и т.п.) и сетевым сервером сети ИВ РВ.
В настоящем стандарте используются следующие форматы записей:
- MAC-команды записываются курсивом в формате LinkCheckReq;
- константы записываются прописными (заглавными) буквами в формате RECEIVE_DELAY1;
- переменные записываются курсивом в формате N.
В настоящем стандарте структура сообщений изложена с учетом:
- порядка следования байтов и битов для всех полей - "от старшего к младшему" (big-endian);
- бита RFU (Reserved For Future), обозначающего поле для будущего использования. По умолчанию данный бит должен быть установлен на ноль передатчиком сообщения и должен быть проигнорирован принимающей стороной.
Для обеспечения безопасной передачи данных АСП РВ используются алгоритмы шифрования данных современных систем передачи данных и протоколов. Необходимость шифрования (применение средств криптографической защиты) данных при ее передаче определяется разработчиком/производителем устройств самостоятельно с учетом действующего законодательства Российской Федерации. Выбор конкретных алгоритмов шифрования данных определяет разработчик АСП РВ в зависимости от его целевого назначения и действующих нормативных документов, в том числе для критической информационной инфраструктуры (КИИ). Используемые в оконечном устройстве алгоритмы шифрования данных должны быть указаны в эксплуатационной документации на соответствующее АСП РВ. Описание и выбор конкретных алгоритмов шифрования данных выходит за рамки настоящего стандарта.
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 15971 Системы обработки информации. Термины и определения
ГОСТ Р 71168 Информационные технологии. Интернет вещей. Спецификация LoRaWAN RU
ГОСТ Р ИСО/МЭК 7498-1 Информационная технология. Взаимосвязь открытых систем. Базовая эталонная модель. Часть 1. Базовая модель
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
В настоящем стандарте применены термины по [2], а также следующие термины с соответствующими определениями:
3.1 абонентская линия: Радиолиния между абонентским средством потребителя, функционирующего в режиме реального времени, и полезной нагрузкой космического аппарата.
3.2 абонентское средство потребителя, функционирующее в режиме реального времени; АСП РВ: Оконечное устройство сети, сопряженное с датчиками физических процессов и осуществляющее обмен сообщениями с сетевым сервером в режиме реального времени.
3.3 активация: Процедура присоединения АСП РВ к сети.
3.4 активация "по воздуху": Способ активации АСП РВ в сети через запрос-ответ по специально назначенному радиоканалу.
3.5 активация через персонализацию: Способ активации АСП РВ в сети через предустановленные параметры контекста сеанса связи.
3.6 восходящий канал: Канал передачи пакетов (сообщений) от АСП РВ к ПН КА.
3.7 высокомобильные беспилотные средства: Воздушные, морские и сухопутные транспортные средства без экипажа на борту, а также подвижные роботизированные комплексы различного назначения.
3.8 контекст сеанса связи: Набор параметров сетевого сеанса и параметров сеанса приложения.
3.9 многоадресная рассылка: Режим передачи нисходящего сообщения нескольким АСП РВ одновременно.
3.10 нисходящий канал: Канал передачи пакетов (сообщений) от ПН КА к АСП РВ.
3.11 полезная нагрузка космического аппарата; ПН КА: Телекоммуникационное оборудование, размещенное на борту космического аппарата и обеспечивающее обмен данными с обработкой, маршрутизации и регенерацией сигнала по абонентским и фидерным линиям в режиме реального времени.
3.12 рабочий цикл: Безразмерная величина, обратная скважности и равная отношению длительности передаваемого радиосообщения к периоду передачи.
Примечание - По умолчанию нормируется к одному часу.
3.13 региональная станция сопряжения; РСС: Узел региональной или национальной сети интернета вещей, функционирующий в режиме РВ и имеющий в своем составе несколько земных станций спутниковой связи.
3.14 сеть: Региональная или национальная сеть интернета вещей, функционирующая в режиме РВ, узлом которой является РСС.
3.15 фидерная линия: Радиолиния между полезной нагрузкой космического аппарата и земной станцией спутниковой связи, входящей в состав РСС.
В настоящем стандарте применены следующие сокращения и обозначения:
АМ - антенный модуль;
АПК - аппаратно-программный комплекс;
АФС - антенно-фидерная система;
ВОЛС - волоконно-оптические линии связи;
ДН - диаграмма направленности;
ЗССС - земная станция спутниковой связи;
КА - космический аппарат (спутник);
НКО - низкая круговая орбита;
ПН - полезная нагрузка;
ПНОД - протокол низкоскоростного обмена данными;
ПНОД РВ - протокол низкоскоростного обмена данными в реальном времени;
СКК - сигнально-кодовая конструкция;
ЭИИМ - эффективно излучаемая изотропная мощность;
ABP - активация через персонализацию;
ACK - подтверждение получения сообщения;
CRC - циклическая контрольная сумма;
D2D - прямой доступ (Direct-to-Device) к типовым абонентским средствам потребителей;
DevAddr - короткий адрес АСП РВ;
DevEUI - идентификатор АСП РВ;
DevNonce - идентификатор запросов на присоединение АСП РВ к сети;
DutyCycle - рабочий цикл;
FEC - параметр кода, означающий его избыточность для возможности исправления ошибок (Forward Error Correction);
Join-Accept - подтверждение присоединения (переприсоединения) АСП РВ к сети;
JoinEUI - идентификатор сервера присоединения, отвечающего за присоединение АСП РВ к сети;
JoinNonce - идентификатор подтверждений присоединения (переприсоединения) АСП РВ к сети;
Join-Request - запрос на присоединение к сети;
LLC - управление логической связью;
LPWAN - энергоэффективная сеть дальнего радиуса действия (Low-power Wide-area Network);
LSCP - протокол низкоскоростного обмена данными;
NbTrans - установленное число передач пакета;
NetID - сетевой адрес АСП РВ;
MAC - управление доступом АСП РВ к радиоканалу;
MIC - код целостности сообщения (message integrity code);
OTAA - способ активации АСП РВ в сети через запрос-ответ по специально назначенному радиоканалу;
Rejoin-Request - запрос на переприсоединение к сети;
RFU - зарезервировано для будущих применений;
SF - коэффициент расширения спектра сигнала;
TDD - полудуплексный режим работы (time division duplex);
"||" - знак конкатенации строк;
"x ... y" - последовательность бит, где "x" - старший бит, а "y" - младший бит.
5.1 Особенности применения низкоорбитальных спутниковых систем в системах интернета вещей реального времени
Низкоорбитальные спутниковые системы передачи данных с целевой функцией интернета вещей должны обеспечивать прямой доступ <1> к абонентским средствам потребителей, функционирующим в режиме реального времени (см. ГОСТ 15971).
--------------------------------
Для создания бесшовных сетей ИВ должна обеспечиваться интеграция НСС с наземными сетями ИВ, функционирующими в режиме РВ на основе использования соответствующих диапазонов частот [3], видов модуляции и протоколов, приемлемых для спутниковых каналов связи.
5.1.1 Основы построения низкоорбитальных спутниковых систем
При построении НСС создается орбитальная группировка из космических аппаратов на круговых орбитах с высотой относительно поверхности Земли от 100 до 2000 км. Для систем спутниковой связи и передачи данных рекомендуемые высоты НКО лежат в диапазоне от 300 до 1500 км.
Период обращения космического аппарата вокруг Земли составляет от 90 мин (при высоте орбиты 300 км) до 115 мин (при высоте орбиты 1500 км), скорость его движения вдоль орбиты - от 7,7 до 7,1 км/с соответственно.
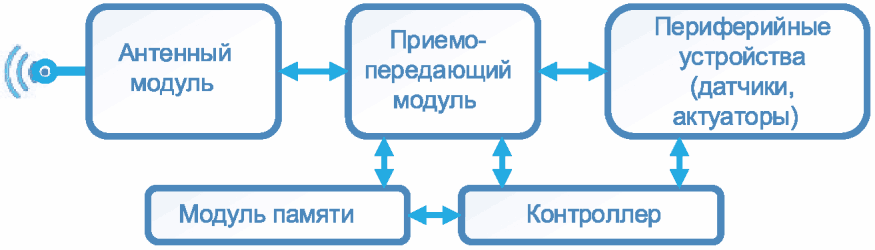
Скорость движения КА относительно АСП РВ изменяется от 0 км/с до максимальной скорости движения спутника вдоль орбиты, что приводит к возникновению эффекта Доплера (статического и динамического), выражающегося в непрерывном изменении центральной частоты сигнала в радиолинии и скорости ее изменения (Гц/с) пропорционально изменению наклонной дальности от КА до АСП РВ (см. приложение А). Это вызывает необходимость компенсировать изменение частоты в абонентских линиях между АСП РВ и КА или применять сигнально-кодовые конструкции, устойчивые к эффекту Доплера.
Минимальная наклонная дальность равна высоте орбиты (АСП РВ видит КА в зените), а максимальная наклонная дальность определяется принятым минимальным рабочим углом места видимости КА относительно местного горизонта. За время сеанса связи потери в радиолинии изменяются пропорционально квадрату отношения максимальной наклонной дальности к высоте орбиты спутника. Для рекомендуемых высот орбит и минимального рабочего угла места, равного 25°, изменения потерь в радиолинии за счет изменения наклонной дальности составляют от 5 дБ (орбита 1500 км) до 6,7 дБ (орбита 300 км).
Минимальное число КА в составе орбитальной группировки при условии непрерывности глобального обслуживания зависит от высоты и наклонения орбиты КА, а также от принятого минимального рабочего угла места.
Каждый космический аппарат в составе орбитальной группировки должен обеспечить трехосную ориентацию и удержание в заданной точке орбитальной плоскости с целью обеспечения устойчивости ее заданной архитектуры в пределах срока активного существования КА (не менее пяти лет).
Архитектура орбитальной группировки может быть одноэшелонной (все плоскости орбит имеют одинаковое наклонение и высоту) или многоэшелонной (разные наклонения плоскостей орбит и высоты при необходимости). Выбор архитектуры орбитальной группировки определяется заданным условием непрерывности обслуживания рабочей зоны на Земле и минимизацией затрат на пусковые услуги КА.
5.1.2 Рабочая зона обслуживания КА
Размер рабочей зоны обслуживания на поверхности Земли определяется принятым минимальным рабочим углом места АСП РВ и высотой орбиты. Для рекомендуемых высот орбит угловой сектор обслуживания каждого КА составляет от 120° (высота 300 км, угол места 25°) до 94,4° (высота орбиты 1500 км, угол места 25°), что обеспечивает рабочую зону на поверхности Земли с максимальным диаметром 1127 км и 3962 км соответственно. Рабочая зона на поверхности Земли для АСП РВ обычно состоит из локальных рабочих зон, формируемых антенной системой полезной нагрузки КА.
Баллистическое построение орбитальной группировки определяется выбором наклонения (i) круговых орбитальных плоскостей (экваториальные  , наклонные
, наклонные  , приполярные
, приполярные  , солнечносинхронные
, солнечносинхронные  ), исходя из заданной приоритетной зоны обслуживания АСП РВ на поверхности Земли.
), исходя из заданной приоритетной зоны обслуживания АСП РВ на поверхности Земли.
, наклонные , приполярные , солнечносинхронные ), исходя из заданной приоритетной зоны обслуживания АСП РВ на поверхности Земли.Переход обслуживания АСП РВ от одного КА к другому эквивалентен организации роуминга в сетях LPWAN. Для успешного процесса его реализации рекомендуется иметь запас бюджета по энергетике сигнала в абонентских линиях более 6 дБ относительно принятого порогового уровня отношения сигнал/шум (см. приложение Б).
Переход обслуживания между КА и РСС должен осуществляться без ограничений на географическое расположение РСС с учетом обеспечения пространственной и частотной развязки КА, работающих с РСС в период сеанса связи с целью минимизации внутрисистемных помех.
5.2 Архитектура системы интернета вещей реального времени на основе низкоорбитальной спутниковой сети
5.2.1 Общая архитектура
Архитектура системы интернета вещей реального времени определяет организацию глобально-распределенной НСС (см. рисунок 1).

Глобально-распределенная НСС предусматривает возможность создания региональных и национальных систем интернета вещей, обеспечивающих предоставление услуг ИВ РВ (см. рисунок 2), в которой обеспечивается бесшовность ее предоставления на основе интеграции с наземными сетями, функционирующими в режиме РВ, с учетом положений [4].

интернета вещей реального времени
Сопряжение между наземной сетью ИВ РВ и НСС обеспечивает РСС, которая может иметь в своем составе несколько земных станций спутниковой связи (по максимальному числу одновременно наблюдаемых КА в заданном интервале времени).
Архитектура системы ИВ РВ имеет звездообразную топологию, в которой узлом сети является РСС, имеющая в своем составе несколько ЗССС, сетевой сервер и сервер присоединений. Серверы приложений при необходимости могут входить в состав РСС. Работу АСП РВ, зарегистрированных в региональной (национальной) системе ИВ РВ, должна контролировать и поддерживать РСС. Зарегистрированные АСП РВ должны иметь возможность одновременной работы в соответствующей наземной сети ИВ, функционирующей в режиме реального времени.
Параметры АСП РВ (частотный план каналов, ЭИИМ канала, цикличность работы) региональной (национальной) системы ИВ РВ должны соответствовать параметрам, согласованным с региональной (национальной) администрацией связи.
Наземные сети ИВ, функционирующие в режиме РВ, должны иметь возможность сопряжения по наземным или спутниковым каналам связи с центром управления системы ИВ РВ (см. рисунок 1) для удаленной поддержки работы РСС.
АСП РВ передают пакеты данных по радиоканалу в соответствии с настоящим стандартом. Получателями пакетов являются ПН КА и базовые станции наземных сетей ИВ, функционирующие в режиме РВ и находящиеся в зоне радиовидимости АСП РВ, если такая возможность в системе ИВ РВ предусмотрена.
Сеть ИВ, функционирующая в режиме РВ, предусматривает три уровня сетевого взаимодействия:
- физический уровень;
- канальный уровень;
- уровень приложений.
В соответствии с ГОСТ Р ИСО/МЭК 7498-1 на остальных уровнях эталонной модели взаимодействия открытых систем преобразование передаваемых данных осуществляется в соответствии с протоколами обмена данными на них и на архитектуру сетей ИВ не влияет.
5.2.2 Функции физического уровня
Физический уровень протокола определяет прием и передачу данных канального уровня по абонентской линии, в том числе и формат сообщений. Передача является двунаправленной в режиме временного разделения приема и передачи (TDD). Допускается применение режима частотного разделения приема и передачи (FDD) при необходимости. Передатчик и приемник физического уровня реализуются на АСП РВ и ПН КА (аналог базовой станции наземной сети ИВ, функционирующей в режиме РВ).
Функции АСП РВ при передаче сообщений по абонентской линии:
- прием информации от датчиков физических процессов;
- формирование пакетов;
- помехоустойчивое кодирование данных канального уровня;
- модуляция радиосигнала.
Функции АСП РВ при приеме сообщений по абонентской линии:
- прием радиосигнала;
- демодуляция радиосигнала;
- помехоустойчивое декодирование данных канального уровня;
- выполнение MAC-команд (при их получении);
- передача управляющей команды на исполнительные устройства датчиков.
Функции ПН КА при приеме сообщений по абонентской линии:
- демодуляция радиосигнала;
- обнаружение пакетов, передаваемых АСП РВ;
- помехоустойчивое декодирование принятых пакетов;
- пересылка успешно принятых пакетов на сетевой сервер по фидерной линии в едином цифровом потоке.
Функции ПН КА при передаче сообщений по абонентской линии:
- прием информации по фидерной линии от заданной ЗССС;
- формирование пакетов данных, передаваемых на АСП РВ;
- помехоустойчивое кодирование сформированных пакетов;
- модуляция радиосигнала;
- передача сообщения в заданном луче и канале абонентской линии.
5.2.3 Функции канального уровня
Канальный уровень определяет управление доступом АСП РВ к радиоканалу (Media Access Control, MAC) и управление логической связью (Logical Link Control, LLC) между АСП РВ и сетевым сервером.
На канальном уровне стандарт устанавливает:
- формат сообщений канального уровня;
- обеспечение множественного доступа АСП РВ к радиоканалу;
- механизм повторных передач.
Канальный уровень протокола реализуется на АСП РВ и сетевом сервере.
5.2.4 Функции абонентского средства потребителя, функционирующего в режиме реального времени, на канальном уровне
Функции АСП РВ:
- формирование и отправка пакетов активации;
- формирование и отправка пакетов данных.
5.2.5 Функции сетевого сервера
Сетевой сервер должен управлять всеми АСП РВ, зарегистрированными в зоне обслуживания РСС, и выполнять следующие основные функции:
- проверка адреса АСП РВ;
- формирование ответов на запросы от АСП РВ;
- квитирование приема от АСП РВ (при необходимости);
- перенаправление потоков пакетов в зависимости от приложения (сервиса);
- регулировка очередей пакетов, поступающих от серверов приложений в направлении АСП РВ;
- передача на сервер присоединения пакетов с запросом на присоединение АСП РВ;
- установка уровня ЭИИМ АСП РВ;
- назначение частотных каналов для АСП РВ (в зависимости от обслуживаемого региона);
- назначение полосы частот канала для АСП РВ;
- назначение (при необходимости) коэффициента расширения спектра сигнала (SF) от SF = 5 до SF = 7 для АСП РВ;
- установка ограничения объема пакета АСП РВ;
- назначение цикличности передачи пакетов АСП РВ.
Сетевой сервер должен обеспечивать контроль подлинности каждого АСП РВ, его соответствие сетевому адресу (NetID) и целостность каждого пакета, поступающего от АСП РВ.
Сетевой сервер должен управлять установкой безопасного соединения для передачи пакетов как в направлении к АСП РВ, так и в направлении от АСП РВ.
Сетевой сервер должен выполнять проверку соответствия параметров АСП РВ региональным (национальным) параметрам, установленным для ЭИИМ, частоты канала и рабочего цикла.
Сетевой сервер должен идентифицировать все пакеты, поступающие от АСП РВ, по отношению к активному КА из всей группы КА, с которыми работают ЗССС из состава РСС в период сеанса связи.
В момент перехода обслуживания АСП РВ с одного КА на другой могут наблюдаться сбои при передаче пакета от АСП РВ. Сетевой сервер должен фиксировать эти моменты времени и отображать их в базе данных соответствующего сервера приложений.
5.2.6 Функции уровня приложений
Сервер приложений отвечает за хранение и обработку прикладных данных, полученных от АСП РВ.
Описание уровня приложений выходит за рамки настоящего стандарта.
5.2.7 Каналы связи
Абонентская линия формируется между АСП РВ и ПН КА с обеспечением двунаправленной передачи данных между ними. Абонентские линии могут поддерживать работу нескольких каналов связи в соответствии с региональными (национальными) параметрами. Характеристики абонентской линии определяются требованиями настоящего стандарта.
Фидерная линия формируется между ПН КА и ЗССС из состава РСС с обеспечением двунаправленного обмена данными для передачи данных на сетевой сервер и получения команд управления в направлении АСП РВ в едином цифровом потоке. Описание фидерной линии выходит за рамки настоящего стандарта.
Канал связи "сетевой сервер - сервер приложений" обеспечивает двусторонний обмен данными между сетевым сервером и сервером приложений. Описание данного канала выходит за рамки настоящего стандарта.
Типовая архитектура АСП РВ приведена на рисунке 3.
Запас энергетического бюджета в абонентских линиях должен обеспечивать возможность работы АСП РВ по своему целевому назначению в пределах временного интервала сеанса связи. Рекомендуемый запас мощности (энергетического бюджета) в абонентских линиях должен быть не менее 6 дБ относительно принятого порогового уровня отношения сигнал/шум (см. приложение Б).
Для соблюдения условий радиочастотной совместимости АСП РВ с радиоэлектронными средствами иных систем рекомендуется принять минимальный рабочий угол места более 25°.
В качестве антенны рекомендуется использовать излучатели с круговой поляризацией, диаграмма направленности которых ориентирована во внешнюю полусферу, а коэффициент усиления не превышает 3 дБи. Не исключается применение и антенных излучателей с линейной поляризацией при обеспечении достаточного уровня энергетики в абонентских линиях.
Мощность передатчика АСП РВ и его рабочий цикл задаются и устанавливаются сигналами управления от сетевого сервера.
Полезная нагрузка КА обеспечивает формирование рабочей зоны на поверхности Земли, внутри которой могут встречаться АСП РВ системы ИВ РВ, обслуживаемые РСС.
Типовая архитектура ПН КА приведена на рисунке 4 и представляет собой ретрансляционный комплекс с обработкой, маршрутизацией и регенерацией сигналов.

космического аппарата
К особенностям функционирования ПН КА относятся:
- гибкое изменение частотного плана работы абонентских линий в зависимости от обслуживаемой рабочей зоны, в том числе по MAC-командам от наземного комплекса управления;
- возможность изменения частотного плана абонентских линий при изменении радиочастотной обстановки (наличии мешающих помех) или официальных претензий со стороны операторов иных систем о фиксировании мешающих помех;
- применение оперативной памяти для ее использования при развертывании орбитальной группировки и парирования возможных интервалов времени отсутствия связи с АСП РВ в процессе движения КА при изменении номера луча антенной системы абонентской линии, обслуживающего данное АСП РВ;
- регулирование ЭИИМ по MAC-командам;
- антенно-фидерная система фидерной линии ПН КА должна иметь диаграмму направленности, обеспечивающую рабочую зону на поверхности Земли с учетом минимально заданного рабочего угла места антенных модулей ЗССС из состава РСС.
Для функционирования ПН КА при обработке пакетов должна быть предоставлена метка времени от системы ГЛОНАСС, поступающая от служебной аппаратуры космической платформы КА. Синхронизация времени АСП РВ и РСС может осуществляться по сигналам системы ГЛОНАСС или с помощью механизма коррекции часов АСП по меткам NTP-сервера в составе РСС при его наличии (это позволит повысить устойчивость связи при потере/подмене сигнала ГЛОНАСС).
Дополнительным элементом к типовой архитектуре ПН КА может быть модуль межспутниковой связи со смежными КА собственной группировки или с иными спутниковыми системами, как правило, размещенными на более высоких орбитах, обеспечивающий непрерывность управления орбитальной группировкой, а при ее неполном составе - и для ретрансляции информации, поступающей от АСП РВ (при необходимости).
Целевая полезная нагрузка космического аппарата должна быть выполнена с обработкой сигналов на борту, возможностью их регенерации и объединения в единый поток для передачи по фидерной линии и гибкой адаптации частотного плана в зависимости от обслуживаемого региона Земли.
Антенная система полезной нагрузки космического аппарата с целевой функцией ИВ РВ должна формировать группу приемо-передающих лучей в угловом секторе обслуживания. Рекомендуется, чтобы смежные лучи пересекались между собой по уровню выше минус 6 дБ (относительно максимума диаграммы направленности).
Региональная станция сопряжения является составной частью НСС и обеспечивает взаимодействие с низкоорбитальной группировкой по фидерным радиолиниям в направлении  и
и  и представляет собой сетевой узел спутниковой компоненты региональной (национальной) системы ИВ РВ (см. рисунок 1).
и представляет собой сетевой узел спутниковой компоненты региональной (национальной) системы ИВ РВ (см. рисунок 1).
и и представляет собой сетевой узел спутниковой компоненты региональной (национальной) системы ИВ РВ (см. рисунок 1).В составе РСС может быть несколько ЗССС, которые должны одновременно взаимодействовать со всеми КА из состава орбитальной группировки, наблюдаемыми из географической точки ее расположения при условии, что время сеанса связи составляет не менее 60 с.
ЗССС включает в свой состав антенный модуль и соответствующий модем. Ее радиотехнические параметры должны соответствовать условиям, которые устанавливают Администрации связи.
Типовая структура РСС приведена на рисунке 5.

Примечание - Резервные элементы на рисунке не показаны.
станции сопряжения
Внешнее оборудование РСС представляет собой совокупность полноповоротных АМ ЗССС, конструктивно объединенных в антенный пост, который должен обеспечивать незатененную работу каждого АМ. Минимальный рабочий угол места рекомендуется не менее 7°.
Примечание - Допускается выполнение АМ на основе активной фазированной решетки (в том числе многолучевой), при этом минимальный рабочий угол должен быть увеличен.
Сопряжение АМ с внутренним оборудованием ЗССС осуществляется по радиочастотным кабелям на промежуточной частоте L-диапазона при расположении внутреннего оборудования на удалении не более 70 м или с использованием ВОЛС (с оптическими преобразователями) при большем удалении.
Питание и управление АМ (в том числе наведение и сопровождение КА) осуществляется от внутреннего оборудования РСС. Питание АМ также может осуществляться по отдельному кабелю.
Внешнее оборудование должно обеспечивать работоспособность ЗССС в условиях окружающей среды, соответствующей климатической зоне ее географического расположения. Внутреннее оборудование ЗССС включает модем.
В состав РСС входит АПК и мультиплексор, обеспечивающий формирование единого цифрового потока для двухстороннего обмена данными с АПК. Состав АПК может варьироваться, но без нарушения условий минимизации круговой задержки при создании глобально-распределенной сети и условий трансграничного обмена трафиком.
В составе РСС необходимо иметь контрольные АСП РВ для выполнения периодической проверки корректности функционирования. Технические параметры контрольных АСП РВ должны быть сертифицированы оператором РСС и НСС.
В общем случае в состав АПК РСС входят: сетевой сервер; сервер присоединения; сервер приложений; сервер биллинга; подсистема контроля и управления ЗССС.
Примечание - При необходимости состав РСС может уточняться по требованию оператора национальной или региональной системы интернета вещей РВ с учетом нормативно-правовых положений страны, в которой размещается РСС.
В соответствии с типовой структурой OSI (см. ГОСТ Р ИСО/МЭК 7498-1) к физическому уровню относится радиоинтерфейс абонентских линий.
Радиоинтерфейс определяет СКК, применяемую для передачи потока битов по абонентским линиям от АСП РВ (восходящие сообщения) и от ПН КА (нисходящие сообщения) на основе протокола множественного доступа.
Протокол множественного доступа обеспечивает организацию адресации и управление маршрутизацией пакетов по радиоканалам в информационной среде [media access control (MAC) или подуровень MAC].
Совместно физический уровень (радиоинтерфейс) и подуровень MAC в данном случае определяют эквивалентные скорости передачи информации (бит/с) на абонентских линиях, время доставки пакетов по ним, емкость отдельного абонентского канала, емкость ПН КА и НСС в целом.
Выбор СКК и протокола множественного доступа определяется требованиями, предъявляемыми системой ИВ РВ к обмену данными по допустимому времени задержки, ЭИИМ, вероятности доведения сообщений и техническими параметрами НСС.
Примечание - Типичным (но не обязательным) решением организации передачи и приема пакетов в абонентских линиях является полудуплексный режим работы (time division duplex, TDD).
Обмен информацией в спутниковой сети ИВ РВ на абонентских линиях осуществляется пакетами, сформированными в соответствии с ГОСТ Р 71168.
На физическом уровне для передачи данных предусмотрено два типа пакетов: пакет с явным заголовком (explicit header modes) и пакет с неявным заголовком (implicit header modes). Формат пакетов физического уровня с явным заголовком, передаваемых АСП РВ (восходящие радиосообщения), представлен на рисунке 6.

Пр - преамбула (preamble); ФЗ - физический заголовок (PHDR);
КС - контрольная сумма физического заголовка (PHDR_CRC)
на физическом уровне
Пакет физического уровня с явным заголовком состоит из поля "Преамбула" (Preamble), поля "Физический заголовок" (PHDR), поля "Контрольная сумма физического заголовка" (PHDR_CRC), поля "Данные" (PHYPayload) и поля "Циклическая контрольная сумма" (CRC), которое применяется только в восходящих радиосообщениях.
Поле "Преамбула" (Preamble) по умолчанию имеет длину 8 символов и предназначено для синхронизации приемного устройства ПН КА перед демодулированием радиосообщения. Длина каждого символа определяется эквивалентной скоростью передачи данных.
Примечание - Длина поля "Преамбула" (Preamble) может принимать другие значения, определяемые региональными параметрами.
В поле "Физический заголовок" (PHDR) передаются: длина поля "Данные" (PHYPayload) в байтах, масштаб кода исправления ошибок, признак наличия или отсутствия поля "Циклическая контрольная сумма" (CRC).
Примечание - Помехоустойчивое кодирование для поля "Физический заголовок" (PHDR) и поля "Контрольная сумма физического заголовка" (PHDR_CRC) установлено по умолчанию с параметром кода FEC = 4/8, а для поля "Данные" (PHYPayload) - обычно FEC = 4/5 (но не обязательно, можно установить 4/6, 4/7 или 4/8).
В поле "Контрольная сумма физического заголовка" (PHDR_CRC) передается ее вычисленное значение.
Поле "Циклическая контрольная сумма" (CRC) имеет длину 2 байта и предназначено для контроля целостности поля "Данные" (PHYPayload).
Поле "Данные" (PHYPayload) содержит в себе сформированный пакет канального уровня, закодированный помехоустойчивым кодом. Длина этого поля изменяется от 12 до Мбайт в зависимости от объема полезной нагрузки канального уровня.
В пакете с неявным заголовком отсутствуют поле "Физический заголовок" (PHDR) и поле "Контрольная сумма физического заголовка" (PHDR_CRC). Неявный заголовок применяется в случае, если для сетевого сервера и АСП РВ заранее известен и фиксирован объем поля "Данные" (PHYPayload).
Режим передачи пакетов с неявным заголовком позволяет повысить емкость спутниковой сети ИВ, функционирующей в режиме реального времени, с сохранением заданных параметров качества обслуживания (в частности уровня коллизий пакетов).
Для регистрации АСП РВ в сети ИВ РВ на сервере присоединения они должны пройти процесс присоединения к сети. При реализации различных процессов (исходного присоединения АСП РВ к сети ИВ РВ, подтверждения присоединения или запроса на переприсоединение) объем поля "Данные" (PHYPayload) будет изменяться. Численные значения приведены в таблице 1.
Таблица 1
при реализации присоединения
Процесс | Объем поля "Данные" (PHYPayload), байт |
Запрос на присоединение к сети (Join-Request) | 23 |
Подтверждение присоединения к сети <*> (Join-Accept) | 17 + (0 ... 16) |
Запрос на переприсоединение к сети <**> (Rejoin-Request) | 19 или 24 |
Для передачи сформированного пакета физического уровня по радиоканалу используется модуляция сигнала, устойчивая к эффекту Доплера (статического и динамического).
Например, для линейной частотной модуляции допускается изменение центральной частоты спектра сигнала за счет статического эффекта Доплера до 25% от полосы частот канала без ухудшения энергетического бюджета абонентских линий.
Динамический эффект Доплера (Гц/с) не должен превышать допустимого дрейфа частоты (df) за время передачи пакета (ToA).
Примечание - При оценке статического эффекта Доплера следует учитывать перемещение АСП РВ относительно КА и возможные температурные уходы задающего генератора.
На физическом уровне осуществляется помехоустойчивое кодирование пакетов. Его использование позволяет ПН КА исправлять часть ошибок в принимаемых пакетах физического уровня.
Помехоустойчивое кодирование осуществляется для всего сообщения канального уровня, обычно с параметром кода FEC, равным 4/5 (но не обязательно, могут быть установлены и другие значения: 4/6, 4/7 или 4/8), в соответствии с ГОСТ Р 71168. Для заголовка пакета всегда применяется параметр кода FEC, равный 4/8.
Примечание - При необходимости в пользовательских решениях или слоях, построенных поверх базового протокола, может быть применено дополнительное кодирование, в том числе и на основе набора блочных циклических кодов, если это необходимо для специфических приложений.
Все восходящие и нисходящие сообщения в поле "Данные" (PHYPayload) несут полезную нагрузку физического уровня, начиная с однобайтного поля "MAC-заголовок" (MHDR), за которым следует поле "MAC-сообщение" (MACPayload) и заканчивая 4-байтным полем "Код целостности сообщения" (MIC). Формат данных канального уровня восходящего сообщения, передаваемого АСП РВ, представлен на рисунке 7.

восходящего сообщения
Поле "MAC-заголовок" (MHDR) предназначено для указания типа сообщения (FType) и основной версии формата данных (Major). Его длина составляет 1 байт.
Поле "MAC-сообщение" (MACPayload) предназначено для адресации АСП РВ и передачи данных по его целевому назначению. Минимальная длина этого поля составляет 7 байт.
Максимальная длина поля "MAC-сообщение" (MACPayload), обозначенная буквой "Y", зависит от физического уровня и региона размещения системы ИВ РВ.
Ни АСП РВ, ни сетевой сервер не должны отправлять пакет, содержащий поле "MAC-сообщение" (MACPayload), превышающее указанную максимальную длину Y. Любой пакет, полученный АСП РВ или сетевым сервером, содержащий поле "MAC-сообщение" (MACPayload) с превышением указанной максимальной длины Y, должен быть отброшен без уведомления.
При необходимости отправки пакета объемом больше, чем установлено, он должен быть предварительно разделен на пакеты допустимого объема.
Поле "Код целостности сообщения" (MIC) предназначено для передачи значения кода целостности сообщения. Его длина составляет 4 байта.
7.1.1 Поле "MAC-заголовок" (MHDR)
Структура поля "MAC-заголовок" (MHDR) приведена на рисунке 8.

7.1.2 Поле "Тип сообщения" (FType)
В протоколе применяется восемь различных типов сообщений (см. таблицу 2): запросы на присоединение и на переприсоединение, подтверждение присоединения, неподтвержденные данные по восходящему/нисходящему каналам и подтвержденные данные по восходящему/нисходящему каналам. Отдельным типом являются сообщения собственного протокола.
Таблица 2
Значение поля | Описание |
000 | Запрос на присоединение к сети (Join-Request) |
001 | Подтверждение присоединения к сети (Join-Accept) |
010 | Неподтверждаемые восходящие данные (Unconfirmed data uplink) |
011 | Неподтверждаемые нисходящие данные (Unconfirmed data downlink) |
100 | Подтверждаемые восходящие данные (Confirmed data uplink) |
101 | Подтверждаемые нисходящие данные (Confirmed data downlink) |
110 | Запрос на переприсоединение к сети (Rejoin-Request) |
111 | Сообщения собственного протокола (Proprietary protocol messages) |
Сообщения с данными используются для передачи MAC-команд и данных приложений (прикладных данных), которые могут быть объединены вместе в одном сообщении. Сообщения собственного протокола могут использоваться для реализации нестандартных форматов сообщений, которые не совместимы со стандартными сообщениями, но должны использоваться для поддержки АСП РВ, имеющими общее понимание собственных (нестандартных) расширений. Когда АСП РВ или сетевой сервер получают сообщение неизвестного нестандартного формата, они должны его проигнорировать.
При превышении допустимого времени задержки обмена сообщениями рекомендуется исключить типы сообщений, требующие подтверждения.
Целостность сообщения обеспечивается разными способами для разных типов сообщений.
7.1.3 Поле "Основная версия формата данных" (Major)
Значения поля "Основная версия формата данных" (Major) и их описание представлены в таблице 3.
Таблица 3
Значения поля | Описание |
00 | ПНОД в наземных сетях |
01 | ПНОД в спутниковых сетях |
10 | ПНОД РВ (для систем ИВ РВ) |
11 | RFU |
Примечание - Значения поля "Основная версия формата данных" (Major) определяют формат сообщений, которыми обмениваются в ходе процедуры присоединения к сети (активации), и первые четыре байта поля "MAC-сообщение" (MACPayload). Для каждой основной версии формата данных АСП РВ могут реализовываться разные неосновные версии формата данных. Неосновная версия, используемая АСП РВ, должна быть известна сетевому серверу до ее использования (например, как часть информации, персонализирующей АСП РВ). Если АСП РВ или сетевой сервер получают данные неизвестной или неподдерживаемой версии формата данных, то они должны быть проигнорированы.
7.1.4 Поле "MAC-сообщение" (MACPayload)
Поле "MAC-сообщение" (MACPayload) содержит поле "Заголовок MAC-сообщения" (FHDR), за которым следуют необязательные поля "Порт" (FPort) и "Прикладные данные" (FRMPayload) (см. рисунок 9).

Поле "Заголовок MAC-сообщения" (FHDR) предназначено для адресации АСП РВ.
Поле "Порт" (FPort) предназначено для адресации поля "Прикладные данные" (FRMPayload) на уровне АСП РВ.
Поле "Прикладные данные" (FRMPayload) предназначено для передачи данных по целевому назначению АСП РВ. Это поле имеет размер от 0 до Z байт, определяемый согласно региональным параметрам.
Поле "MAC-сообщение" (MACPayload), состоящее только из поля "Заголовок MAC-сообщения" (FHDR), является корректным.
7.1.5 Поле "Заголовок MAC-сообщения" (FHDR)
Поле "Заголовок MAC-сообщения" (FHDR) содержит четырехбайтный короткий адрес АСП РВ (DevAddr), однобайтное поле "Управление кадром" (FCtrl), двухбайтное поле "Счетчик кадров" (FCnt) и поле переменной длины "Параметры кадра" (FOpts) для передачи MAC-команд длиной до 15 байт (см. рисунок 10).

7.1.6 Структура поля "Управление кадром" (FCtrl)
Для нисходящего сообщения структура поля "Управление кадром" (FCtrl) приведена на рисунке 11.

для нисходящего канала
Для восходящего сообщения структура поля "Управление кадром" (FCtrl) приведена на рисунке 12.

для восходящего канала
Адаптивное управление скоростью передачи данных на абонентских линиях между АСП РВ и ПН КА не применяется из-за постоянного и быстрого изменения затухания сигнала в радиоканале. Сетевой сервер в границах одного сеанса связи не управляет скоростью передачи данных и выходной мощностью передатчика АСП РВ независимо от качества принимаемого сигнала. Поэтому седьмой бит поля "Управление кадром" (FCtrl) для нисходящего канала, а также седьмой и шестой биты поля "Управление кадром" (FCtrl) для восходящего канала не используются и должны быть установлены на ноль.
Четвертый бит поля "Управление кадром" (FCtrl) для восходящего канала не используется и должен быть установлен на ноль.
Для уменьшения времени задержки обмена данными рекомендуется отключение подтверждения получения сообщения для восходящего канала. При этом пятый бит поля "Управление кадром" (FCtrl) для нисходящего и восходящего каналов не задействуется.
Для снижения числа потерянных пакетов сетевым сервером могут посылаться MAC-команды, задающие число повторений для каждого восходящего сообщения.
7.1.7 Подтверждение получения сообщения
При получении сообщения, требующего уведомления о получении данных, получатель должен ответить сообщением, в котором установлен бит поля "Подтверждение получения сообщения" (ACK).
Подтверждение отправляется только в ответ на последнее полученное сообщение и никогда не повторяется.
Примечание - АСП РВ может упростить процедуру подтверждения и иметь несколько вариантов ее выполнения. АСП РВ может передавать явное (возможно пустое) сообщение с подтверждением получения данных сразу после получения сообщения с данными, требующего подтверждения получения. Кроме того, АСП РВ может отложить передачу подтверждения, включив его в состав очередного сообщения данных.
7.1.8 Поле "Счетчик кадров" (FCnt)
В каждом АСП РВ имеется два счетчика кадров, чтобы отслеживать и хранить число кадров данных, переданных в восходящий канал сетевому серверу (FCntUp), и принятых в нисходящем канале от сетевого сервера (FCntDown). Значение счетчика кадров FCntUp АСП РВ увеличивается, когда кадр данных отправлен на сетевой сервер (восходящий канал). Аналогичные счетчики для каждого из зарегистрированных АСП РВ имеются на сетевом сервере. Значение счетчика кадров FCntDown увеличивается сетевым сервером, когда кадр данных передается на АСП РВ (нисходящий канал). Сетевой сервер отслеживает счетчик кадров восходящего канала и генерирует счетчик нисходящего канала для каждого АСП РВ.
Счетчик кадров FCntUp не должен увеличиваться в случае повторных передач подтвержденного или неподтвержденного кадра (см. параметр NbTrans). Сетевой сервер должен отбрасывать повторно переданные кадры и направлять только один экземпляр кадра на соответствующий сервер приложений.
Счетчики кадров имеют разрядность 32 бита. Поле "Счетчик кадров" (FCnt) соответствует младшим 16 битам 32-битового счетчика кадров.
АСП РВ не должно повторно обрабатывать один и тот же кадр, принятый по нисходящему каналу. Последующие повторные передачи должны игнорироваться без обработки.
Примечания
1 Это означает, что АСП РВ будет отправлять подтверждение единожды, только после приема нисходящего сообщения, требующего подтверждения. Точно так же АСП РВ будет генерировать только одно восходящее сообщение после получения кадра с установленным битом поля "Отложенные кадры" (FPending) до увеличения своего счетчика FCntUp.
2 Поскольку поле "Счетчик кадров" (FCnt) содержит только 16 младших битов 32-битового счетчика кадров, сервер должен вычислить 16 старших битов счетчика кадров, наблюдая за трафиком.
7.1.9 Поле "Параметры кадра" (FOpts)
Поле "Длина параметров кадра" (FOptsLen) в поле "Управление кадром" (FCtrl) содержит фактическую длину поля "Параметры кадра" (FOpts), включенного в кадр.
Если в поле "Длина параметров кадра" (FOptsLen) значение равно 0, то поле "Параметры кадра" (FOpts) должно отсутствовать. Если в поле "Длина параметров кадра" (FOptsLen) значение не равно 0, т.е. если в поле "Параметры кадра" (FOpts) присутствуют MAC-команды, то значение поля "Порт" (FPort) не может быть равным 0.
MAC-команды не должны присутствовать одновременно в поле полезной нагрузки и поле опций кадра. Если это произойдет, то АСП РВ должно отбросить кадр.
7.1.10 Поле "Порт" (FPort)
Если поле "Прикладные данные" (FRMPayload) кадра заполнено, то должно присутствовать поле "Порт" (FPort). Данное поле занимает 2 байта, а его значения нумеруется от 0 до 255.
Если значение поля "Порт" (FPort) равно 0, то это указывает, что поле "Прикладные данные" (FRMPayload) содержит только MAC-команды.
Значения поля "Порт" (FPort) от 1 до 223 (0x01..0xDF) зависят от приложения.
Значение поля "Порт" (FPort), равное 224 (0xE0), предназначено для протокола тестирования уровня MAC.
Значения поля "Порт" (FPort) от 225 до 255 (0xE1..0xFF) зарезервированы для использования в будущем.
Примечание - Значение поля "Порт" (FPort), равное 224, предназначено для беспроводного запуска сценариев проверки соответствия MAC на окончательных версиях АСП РВ без необходимости полагаться на конкретные версии тестов.
7.1.11 Код целостности сообщения (MIC)
Код целостности сообщения (MIC) рассчитывается по всем полям в кадре:
сообщение (msg) = MHDR || FHDR || FPort || FRMPayload
Код целостности сообщения MIC рассчитывается согласно ГОСТ Р 71168.
Для работы в сети каждое АСП РВ должно быть зарегистрировано и активировано. Регистрация производится для включения АСП РВ в процесс обслуживания сетью ИВ РВ.
Активация АСП РВ может быть выполнена двумя способами: "по воздуху" (Over The Air Activation, OTAA) или через персонализацию (Activation By Personalization, ABP).
АСП РВ должно иметь возможность реализовать оба способа активации.
7.2.1 Идентификатор АСП РВ (DevEUI)
Идентификатор АСП РВ (DevEUI) - это идентификатор АСП РВ в адресном пространстве, который однозначно идентифицирует АСП РВ в сети ИВ РВ (в данном случае при переходе обслуживания от одного КА к другому КА).
Все АСП РВ должны иметь назначенный идентификатор (DevEUI), независимо от того, какая процедура активации используется (например, ABP или OTAA). Он должен храниться в энергонезависимой памяти АСП РВ.
Идентификатор АСП РВ (DevEUI) рекомендуется использовать сетевым серверам в качестве уникального идентификатора АСП РВ, независимо от используемого способа активации АСП РВ, для идентификации АСП РВ при его перемещении из одного сегмента сети в другой, в том числе и при передаче обслуживания АСП РВ от одного КА другому.
Примечание - Рекомендуется, чтобы идентификатор АСП РВ (DevEUI) также был доступен на этикетке АСП РВ для целей администрирования.
7.2.2 Поле "Короткий адрес АСП РВ" (DevAddr)
Короткий адрес АСП РВ DevAddr состоит из 32 бит и идентифицирует АСП РВ в текущей (существующей) сети. Он выделяется домашним сетевым сервером. Формат поля "Короткий адрес АСП РВ" (DevAddr) должен соответствовать приведенному на рисунке 13.

Протокол низкоскоростного обмена данными поддерживает различные типы сетевых адресов с разным размером сетевого адресного пространства. Переменный размер поля "Префикс" (AddrPrefix) является производным от уникального идентификатора домашнего сетевого сервера NetID, за исключением значений поля "Префикс" (AddrPrefix), зарезервированных для частных/экспериментальных сетей. Поле "Префикс" (AddrPrefix) позволяет сетевым серверам обнаруживать и в реальном времени управлять АСП РВ в роуминге. АСП РВ, которые не соблюдают это правило, не смогут переподключаться между двумя сетями, т.к. будет невозможно найти их домашний сетевой сервер.
Младшие (от 31-N до 0) биты поля "Короткий адрес" (DevAddr) - это сетевой адрес АСП РВ (NwkAddr), который может назначаться по усмотрению администратора сети.
Поле переменного размера "Префикс" (AddrPrefix) должно быть получено из уникального идентификатора сетевого сервера NetID (24-битное число). Поле "Префикс" (AddrPrefix) позволяет обнаружить сетевой сервер, назначивший короткий адрес АСП РВ DevAddr. Определено восемь типов уникального идентификатора сетевого сервера NetID, которые соответствуют разным значениям N и формату поля "Префикс" (AddrPrefix) (см. таблицу 4).
Таблица 4
(AddrPrefix) для каждого типа уникального идентификатора
сетевого сервера NetID
Тип уникального идентификатора сетевого сервера NetID | Значение N | Формат поля "Префикс" (AddrPrefix) |
0 | 7 | 0b0xx'xxxx |
1 | 8 | 0b10xx'xxxx |
2 | 12 | 0b110x'xxxx'xxxx |
3 | 15 | 0b111'0xxx'xxxx'xxxx |
4 | 17 | 0b1'1110'xxxx'xxxx'xxxx |
5 | 19 | 0b111'110х'xxxx'xxxx'xxxx |
6 | 22 | 0b11'1111'0xxx'xxxx'xxxx'xxxx |
7 | 25 | 0b1'1111'110x'xxxx'xxxx'xxxx'xxxx |
Значения поля "Префикс" (AddrPrefix), указанные на рисунке 14, могут быть использованы любой частной/экспериментальной сетью и не будут взаимодействовать в роуминге.

для частной/экспериментальной сети
7.2.3 Процедура присоединения к сети
Со стороны АСП РВ процедура присоединения к сети представляет собой отправку АСП РВ запроса на присоединение к сети (Join-Request) или запроса на переприсоединение к сети (Rejoin-Request) и получение подтверждения присоединения к сети (Join-Accept).
7.2.3.1 Запрос на присоединение к сети (Join-Request)
Процедура присоединения всегда инициируется АСП РВ путем отправки запроса на присоединение к сети. Структура сообщения представлена на рисунке 15.

Запрос на присоединение к сети содержит поле "Идентификатор АСП РВ" (DevEUI), поле "Идентификатор сервера присоединения" (JoinEUI) и двухбайтное поле "Идентификатор запроса на присоединение" (DevNonce).
7.2.3.2 Поле "Идентификатор запроса на присоединение" (DevNonce)
Идентификатор запроса на присоединение - это счетчик, значение которого начинается с 0, когда АСП РВ изначально включается и увеличивается с каждым запросом на присоединение Join-Request. Значение поля "Идентификатор запроса на присоединение" (DevNonce) никогда не должно использоваться повторно для заданного значения поля "Идентификатор сервера присоединения" (JoinEUI). Если АСП РВ может быть выключено, а затем снова включено, то идентификатор запроса на присоединение не должен изменяться (он должен сохраняться в энергонезависимой памяти). Сброс идентификатор запроса на присоединение без изменения идентификатора сервера присоединения вызовет отклонение сетевым сервером запроса АСП РВ на присоединение к сети. Для каждого АСП РВ сетевой сервер отслеживает значения идентификатора запроса на присоединение, использованные АСП РВ, и игнорирует запросы на присоединение к сети, если значение поля "Идентификатор запроса на присоединение" (DevNonce) не изменилось (не увеличилось).
В связи с тем, что присоединение к сети может завершиться неудачей, сервер сохраняет последнее значение идентификатора запроса на присоединение, закончившегося успехом. Новый идентификатор запроса на присоединение к сети, полученный сервером сети от АСП РВ, сравнивается с хранящимся на сервере сети значением идентификатора последнего успешного выполненного запроса на присоединение от данного АСП РВ. Если пришедшее в запросе значение DevNonce оказывается больше соответствующего значения последнего успешного присоединения, то запрос на присоединение выполняется сервером сети, в противном случае он отклоняется. В случае успешного выполнения процедуры присоединения сохраняемое последнее значение идентификатора запроса на присоединение заменяется на новое значение, отправленное в запросе на присоединение АСП РВ.
Когда счетчик DevNonce переполняется (предыдущее значение счетчика равно 16 777 215) - эксплуатация АСП РВ завершается.
Примечание - Этот механизм предотвращает атаки повторного воспроизведения путем отправки ранее записанных запросов на присоединение с целью отключения соответствующего АСП РВ от сети. Сетевой сервер в любое время обработает запрос на присоединение и сформирует пакет с подтверждением присоединения, он должен поддерживать и старые параметры контекста сеанса и новые, пока не получит первый успешный пакет из восходящего канала, содержащий MAC-команду на использование настроек нового сеанса. После этого настройки старого сеанса могут быть безопасно удалены.
Запрос на присоединение может передаваться на установленной скорости передачи данных и частоте, выбранной из назначенных для присоединения частотных каналов. Для каждой следующей передачи запроса на присоединение АСП РВ должно увеличить значение поля "Идентификатор запроса на присоединение" (DevNonce).
7.2.3.3 Сообщение с подтверждением присоединения (Join-Accept)
Сетевой сервер отвечает на запрос на присоединение (переприсоединение) сообщением с подтверждением присоединения, если АСП РВ разрешено присоединение к сети. Сообщение с подтверждением присоединения отправляется как обычное нисходящее сообщение.
Ответ АСП РВ не передается, если запрос на присоединение не принят.
Сообщение с подтверждением присоединения содержит поле "Счетчик повторных присоединений" (JoinNonce) из 3 байт, поле "Сетевой идентификатор" (NetID), поле "Короткий адрес АСП РВ" (DevAddr), поле "Параметры нисходящего канала" (DLSettings), поле "Задержка между TX и RX" (RxDelay), поле "Список сетевых параметров" (CFList) и поле "Тип списка сетевых параметров" (CFListType) для сети, к которой присоединилось АСП РВ (см. рисунок 16). Дополнительные поля "Список сетевых параметров" (CFList) и "Тип списка сетевых параметров" (CFListType) содержат региональные параметры при необходимости.

с подтверждением присоединения
Поле "Счетчик повторных присоединений" (JoinNonce) содержит значение счетчика повторных присоединений для конкретного АСП РВ, предоставленное сервером присоединения. Значения счетчика увеличиваются на единицу при каждом присоединении и никогда не повторяются.
АСП РВ отслеживает значение поля "Счетчик повторных присоединений" (JoinNonce), использованное в последнем успешно обработанном подтверждении присоединения Join-Accept. АСП РВ принимает подтверждение только если в поле "Код целостности сообщения" (MIC) корректное значение и значение поля "Счетчик повторных присоединений" (JoinNonce) строго больше, чем записанное ранее. В этом случае новое значение заменяет ранее сохраненное.
Если АСП РВ подвергается периодическому выключению/включению питания, то значение поля "Счетчик повторных присоединений" (JoinNonce) при этом меняться не должно (оно должно сохраняться в энергонезависимой памяти).
Уникальный идентификатор сети (NetID) составляет 24 бита, за исключением значений, отведенных для частных/экспериментальных сетей, управление которыми не осуществляется.
Выделяется 215 зарезервированных значений уникального идентификатора сети для частных/экспериментальных сетей, формируемых согласно рисунку 17.

идентификатора сети для частных/экспериментальных сетей
Значение поля "Сетевой идентификатор" (NetID) в сообщении с подтверждением присоединения соответствует уникальному идентификатору "домашней" сети АСП РВ.
Сеть, которая присваивает короткий адрес АСП РВ, и "домашняя" сеть могут быть разными в состоянии роуминга.
Поле "Параметры нисходящего канала" (DLsettings) содержит конфигурацию нисходящего канала согласно рисунку 18.

Бит OptNeg указывает, какую версию протокола реализует сетевой сервер.
Типы запроса на присоединение (переприсоединение) и их кодировка соответствуют ГОСТ Р 71168.
7.2.4 Запрос на переприсоединение к сети (Rejoin-Request)
После активации АСП РВ может периодически передавать запрос на переприсоединение к сети (Rejoin-Request) (помимо обмена данными, определенного приложением). Это сообщение с запросом на переприсоединение к сети дает возможность периодически на стороне сервера инициализировать новый сеанс связи для АСП РВ. С этой целью сеть (сетевой сервер) отвечает сообщением подтверждения присоединения к сети (Join-Accept).
Сетевой сервер может также после запроса на переприсоединение к сети передавать нисходящие сообщения и MAC-команды. Эта возможность полезна для сброса параметров приема АСП РВ в случае, если состояние MAC-уровня рассинхронизовалось между АСП РВ и сетевым сервером.
Процедура переприсоединения всегда инициируется АСП РВ путем отправки сообщения с запросом на переприсоединение к сети в соответствии с ГОСТ Р 71168.
Радиочастота канала передачи каждого пакета должна выбираться АСП РВ в соответствии с заранее назначенными номиналами центральных частот каналов, предусмотренных в полосе рабочих частот приема ПН КА для соответствующего региона обслуживания на Земле, что контролируется со стороны сетевого сервера региональной станции сопряжения, а приоритетное управление частотным планом работы каналов ПН КА обеспечивается от наземного комплекса управления системы.
Нисходящий пакет (требующий или не требующий подтверждения от АСП РВ) не должен повторно отправляться сетевым сервером с использованием одного и того же счетчика значения нисходящих пакетов. Если после отправки нисходящего сообщения, требующего подтверждения, сетевой сервер не получил от АСП РВ уведомление о доставке, то он должен уведомить об этом сервер приложения. Сервер приложения принимает решение о целесообразности повторной передачи нисходящего сообщения, требующего подтверждения. Нисходящие пакеты, не требующие подтверждения, передаются заранее заданное число раз (до пятнадцати).
Восходящие пакеты (требующие и не требующие подтверждения) передаются от одного до пятнадцати раз. После каждого повторения АСП РВ должно ждать, пока не закроется окно приема. Задержка между повторными передачами остается на усмотрение АСП РВ и может быть различной для разных АСП РВ.
АСП РВ должно остановить любую дальнейшую передачу восходящих пакетов, требующих подтверждения, если получен соответствующий нисходящий пакет с подтверждением.
Если сетевой сервер получает один и тот же восходящий пакет более установленного числа передач (NbTrans), то это может быть признаком атаки на сервер или неисправности АСП. В этом случае сетевой сервер не должен обрабатывать избыточные пакеты.
Необходимость использования повторных передач определяется индивидуально для каждого АСП РВ.
Набор MAC-команд предназначен для сетевого администрирования и может быть использован для обмена между сетевым сервером и АСП РВ на MAC-уровне (см. таблицу 5). MAC-команды MAC-уровня не обрабатываются сервером приложений и приложением, запущенным на АСП РВ.
Таблица 5
CID | MAC-команда | Передается | Краткое описание | |
от АСП РВ | на АСП РВ | |||
0x01 | ResetInd | x | - | Используются АСП РВ при активации через персонализацию для индикации сброса и согласования версий протокола |
0x01 | ResetConf | - | x | Подтверждает MAC-команду ResetInd |
0x02 | LinkCheckReq | x | - | Используется АСП РВ для проверки его подключения к сети |
0x02 | LinkCheckAns | - | - | Ответ на MAC-команду LinkCheckReq. Содержит оценку мощности полученного сигнала, указывающую на качество приема АСП РВ (устойчивость связи) |
0x03 | LinkADRReq | - | x | Запрашивает АСП РВ изменить скорость передачи данных, мощность передачи, количество повторений или канал |
0x03 | LinkADRAns | x | - | Подтверждает MAC-команду LinkADRReq |
0x04 | DutyCycleReq | - | x | Устанавливает максимальное значение рабочего цикла АСП РВ на передачу |
0x04 | DutyCycleAns | x | - | Подтверждает MAC-команду DutyCycleReq |
0x05 | RXParamSetupReq | - | x | Устанавливает параметры окон приема |
0x05 | RXParamSetupAns | x | - | Подтверждает MAC-команду RXParamSetupReq |
0x06 | DevStatusReq | - | x | Запрашивает статус АСП РВ |
0x06 | DevStatusAns | x | - | Передает статус (состояние) АСП РВ, а именно уровень заряда его батареи и отношение сигнал/шум |
0x07 | NewChannelReq | - | x | Изменяет частоты каналов |
0x07 | NewChannelAns | x | - | Подтверждает MAC-команду NewChannelReq |
0x08 | RXTimingSetupReq | - | x | Устанавливает временные интервалы для окон приема |
0x08 | RXTimingSetupAns | x | - | Подтверждает MAC-команду RXTimingSetupReq |
0x09 | TxParamSetupReq | - | x | Используется сетевым сервером, чтобы установить максимально допустимое время задержки (dwell time) и максимальную эффективную изотропную излучаемую мощность (ЭИИМ) АСП РВ, на основе локальных соглашений и нормативных актов |
0x09 | TxParamSetupAns | x | - | Подтверждает MAC-команду TxParamSetupReq |
0x0A | DIChannelReq | - | x | Изменяет частоту нисходящего канала для окна приема по отношению к частоте восходящего канала |
0x0A | DIChannelAns | x | - | Подтверждает MAC-команду DIChannelReq |
0x0D | DeviceTimeReq | x | - | Используется АСП РВ для запроса текущей даты и времени |
0x0D | DeviceTimeAns | - | x | Сеть отправляет ответ на запрос DeviceTimeReq |
0x0E | ForceRejoinReq | - | x | Посылается сетью для запроса немедленного переприсоединения АСП РВ, дополнительно указывается количество и периодичность повторов |
0x0F | RejoinParamSetupReq | - | x | Используется сетью для установки периодичности отправки АСП РВ запросов на переприсоединение |
0x0F | RejoinParamSetupAns | x | - | Подтверждает MAC-команду RejoinParamSetupReq |
От 0x80 до 0xFF | Проприетарные MAC-команды | x | x | Зарезервировано для команд, действующих только в региональных сетях ИВ РВ |
Один кадр данных может содержать любую последовательность MAC-команд, вставленную в поле "Параметры кадра" (FOpts) или отправленную в отдельном кадре данных в поле "Прикладные данные" (FRMPayload) со значением поля "Порт" (FPort), равным 0.
MAC-команды, передаваемые в поле "Параметры кадра" (FOpts), отправляются в кодированном виде и не должны превышать 15 байт. MAC-команды, отправляемые в поле "Прикладные данные" (FRMPayload), всегда кодируются и их длина не должна превышать максимальную длину поля "Прикладные данные" (FRMPayload).
MAC-команда состоит из поля "Идентификатор MAC-команды" (CID) размером 1 байт и поля "Атрибуты MAC-команды" размером от 0 до 14 байт. Для некоторых команд поле "Атрибуты MAC-команды" может быть пустым.
MAC-команды со значениями идентификаторов MAC-команды от 0x01 до 0x7F предназначены для использования во всех сетях.
Приемная сторона отвечает/подтверждает получение MAC-команд в том же порядке, как они были получены принимающей стороной. Ответ для каждой MAC-команды последовательно добавляется в буфер. На все MAC-команды, полученные в одном кадре, ответы должны быть переданы в одном кадре (т.е. буфер, содержащий ответы на MAC-команды, должен быть отправлен в одном кадре). Если длина буфера с MAC-ответами больше, чем максимальная длина поля "Параметры кадра" (FOpts), АСП РВ должно отправить весь буфер только в поле "Прикладные данные" (FRMPayload) на порт 0. Если АСП РВ надо отправить прикладные данные и MAC-ответы, но они не помещаются в один кадр, то MAC-ответы должны быть отправлены в первую очередь. Если длина буфера превышает максимальный используемый размер поля "Прикладные данные" (FRMPayload), АСП РВ перед сборкой кадра должно уменьшить буфер до максимального размера поля "Прикладные данные" (FRMPayload). Поэтому ответы на последние MAC-команды могут быть неполными. В любом случае полный список MAC-команд выполняется, даже если буфер, содержащий MAC-ответы, должен быть обрезан. Сетевой сервер не должен генерировать последовательность MAC-команд, на которые АСП РВ не может ответить одним восходящим кадром.
Примечания
1 В основном, АСП РВ будет отвечать только один раз на любую полученную MAC-команду. Если ответ потерян, то сеть вынуждена будет снова послать MAC-команду. Сетевой сервер решает, что MAC-команда должна быть отправлена повторно, когда он получает новое восходящее сообщение, которое не содержит ответа.
Только MAC-команды RxParamSetupReq, RxTimingSetupReq и DIChannelReq имеют другой механизм подтверждения, описанный в соответствующих разделах, так как они влияют на параметры нисходящего канала.
2 Когда MAC-команда инициируется АСП РВ, сеть делает все возможное для отправки подтверждения/ответа в окна приема сразу после запроса.
3 Длина MAC-команды не задается явно и должна быть неявно известной по MAC-реализации. Поэтому неизвестные MAC-команды не могут быть пропущены, и первая неизвестная MAC-команда завершает обработку последовательности MAC-команд.
7.5.1 MAC-команды индикации сброса (ResetInd, ResetConf)
При активации "по воздуху" АСП РВ не должны отправлять эту MAC-команду. Сетевой сервер должен игнорировать MAC-команду ResetInd, поступившую от АСП РВ с активацией "по воздуху".
С помощью MAC-команды ResetInd АСП РВ с активацией через персонализацию извещает сеть, что оно было повторно инициализировано, и что оно переключено на свои MAC и радионастройки по умолчанию (т.е. параметры, изначально запрограммированные в АСП РВ при изготовлении, за исключением трех счетчиков кадров). MAC-команда ResetInd должна добавляться в поле "Параметры кадра" (FOpts) всех восходящих кадров, пока не будет получена MAC-команда ResetConf.
Данная MAC-команда не является сигналом сетевому серверу, что были сброшены счетчики кадров. Счетчики кадров нисходящих и восходящих сообщений не должны сбрасываться в АСП РВ при активации через персонализацию.
Примечание - Данная MAC-команда предназначена для АСП РВ с активацией через персонализацию, питание которых может быть отключено в какой-то момент времени. АСП РВ может потерять настройки соединения текущего сеанса связи, хранящиеся в ОЗУ (кроме счетчиков кадров, которые должны быть сохранены в энергонезависимой памяти). В этом случае АСП РВ нуждается в том, чтобы как-то сообщить сетевому серверу о потере настроек соединения сеанса связи. В будущем эта MAC-команда может также использоваться для согласования параметров протокола между АСП РВ и сетевым сервером.
MAC-команда ResetInd включает в себя указание на используемый протокол низкоскоростного обмена данными, поддерживаемый АСП РВ (см. рисунки 19, 20).


Поле "Дополнительный номер версии" (Minor) указывает на дополнительный номер версии протокола, поддерживаемый АСП РВ (см. таблицу 6).
Таблица 6
Дополнительный номер версии (Minor) | Значение поля |
RFU | 0 |
1 (ПНОД для наземных сетей) | 1 |
2 (ПНОД для спутниковых сетей) | 2 |
3 (ПНОД РВ для систем ИВ РВ) | 3 |
RFU | От 4 до 15 |
Когда сетевой сервер получает MAC-команду ResetInd, он отвечает MAC-командой ResetConf.
MAC-команда ResetConf содержит один байт данных, закодированных с использованием формата, поддерживаемого сетевым сервером (см. рисунок 21).

Версия протокола сетевого сервера, которую несет ResetConf, должна совпадать с версией протокола АСП РВ. Любое другое значение является недопустимым.
Если версия сервера не совпадает с версией АСП РВ, устройство должно отбросить MAC-команду ResetConf и повторно отправить MAC-команду ResetInd в следующем восходящем кадре.
7.5.2 MAC-команды проверки подключения к сети (LinkCheckReq, LinkCheckAns)
С помощью MAC-команды LinkCheckReq АСП РВ может проверить свое подключение к сети. MAC-команда не имеет полезных данных.
Когда сетевой сервер получает LinkCheckReq через ПН КА, он отвечает MAC-командой LinkCheckAns. Структура MAC-команды LinkCheckAns представлена на рисунке 22.

Поле "Устойчивость демодуляции" (Margin) представляет собой 8-битовое целое число без знака в диапазоне от 0 до 254 и указывает значение устойчивости связи в дБ, полученное по факту успешного приема последней MAC-команды LinkCheckReq. Значение, равное 0, означает, что пакет был получен на минимальном уровне отношения сигнал/шум (0 дБ или отсутствии значения), а значение, равное 20, например, означает, что пакет достиг ПН КА с 20 дБ запаса относительно минимального уровня. Значение, равное 255, зарезервировано для будущего использования.
7.5.3 MAC-команды установки рабочего цикла АСП РВ (DutyCycleReq, DutyCycleAns)
MAC-команда DutyCycleReq используется сетевым сервером, чтобы ограничить АСП РВ время на передачу сообщений в радиоэфире. Структура MAC-команды представлена на рисунках 23 и 24.


(DutyCyclePL) MAC-команды DutyCycleReq
Значения максимально допустимого рабочего цикла передачи MaxDutyCycle находятся в диапазоне от 0 до 15. Значение 0 соответствует "нет ограничений", если в региональных параметрах не указано иначе.
АСП РВ отвечает на MAC-команду DutyCycleReq MAC-командой DutyCycleAns. Она не содержит никаких полезных данных.
Максимально допустимый рабочий цикл передачи вычисляется:

7.5.4 MAC-команда запроса статуса АСП РВ (DevStatusReq)
С помощью MAC-команды DevStatusReq сетевой сервер может запросить информацию о состоянии АСП РВ. MAC-команда не имеет атрибутов. Если АСП РВ получило MAC-команду DevStatusReq, то оно должно ответить MAC-командой DevStatusAns. Структура MAC-команды представлена на рисунке 25.

Уровень заряда батареи (Battery) кодируется в соответствии с таблицей 7.
Таблица 7
Уровень заряда батареи | Описание |
0 | АСП РВ подключено к внешнему источнику питания |
От 1 до 254 | Уровень заряда батареи: 1 - находится на минимуме; 254 - находится на максимуме |
255 | АСП РВ не смогло измерить уровень заряда батареи |
Поле "Устойчивость демодуляции" (Margin) содержит значение отношения сигнал/шум (C/N), измеренное в дБ при приеме последней MAC-команды DevStatusReq. Значение поля "Устойчивость демодуляции" (Margin) округляется до ближайшего целого значения. Это целое 6-битовое число со знаком с минимальным значением минус 32 дБ и максимальным значением плюс 31 дБ. Формат поля "Статус АСП РВ" (Status) представлен на рисунке 26.

7.5.5 MAC-команды создания и модификации канала (NewChannelReq, DIChannelReq)
АСП РВ, работающие в регионе, для которого определен фиксированный частотный план каналов, не должны выполнять эти MAC-команды (т.е. АСП РВ не должно отвечать на MAC-команды). Задаваемые каналы должны соответствовать параметрам, согласованным с соответствующими Администрациями связи.
MAC-команда NewChannelReq может использоваться для изменения параметров существующего двунаправленного канала или создания нового. MAC-команда задает центральную частоту нового канала и скорость передачи данных в восходящем канале (см. рисунок 27).

Индекс каналов (ChIndex) - это индекс вновь созданного или измененного канала. Для каждого региона устанавливаются каналы "по умолчанию", которые не могут быть изменены с помощью MAC-команды NewChannelReq.
Если число каналов "по умолчанию" равно N, то нумероваться каналы "по умолчанию" будут от 0 до [N-1], а от N до 15 будут нумероваться редактируемые каналы. Таким образом, индекс каналов (ChIndex) может принимать значение от N до 15. АСП РВ должно быть в состоянии обрабатывать по меньшей мере 16 различных каналов. В определенном регионе АСП РВ может хранить параметры более 16 каналов.
Поле "Частота" (Freq) содержит 24-битовое целое число без знака. Фактическая частота канала в Гц считается 100·Freq, где значения, представляющие частоты ниже 100 МГц, зарезервированы для использования в будущем. Это позволяет устанавливать частоту канала в диапазоне от 100 МГц до 1,67 ГГц с шагом 100 Гц. Значение Freq, равное 0, отключает канал.
Поле "Скорость передачи данных" (DrRange) определяет разрешенную скорость передачи данных для восходящего канала. Поле разделено на два 4-битных индекса (см. рисунок 28). В поле "DR" указывается разрешенная скорость передачи данных для восходящего канала.

данных" (DrRange)
Измененный канал включается и сразу может быть использован для взаимодействия с сетевым сервером.
АСП РВ подтверждает получение MAC-команды NewChannelReq, отправкой в ответ MAC-команды NewChannelAns. Эта MAC-команда содержит атрибут (см. рисунок 29).

Биты поля "Статус" (Status) имеют значение согласно рисунку 30 и таблице 8.

Таблица 8
Атрибут | Бит = 0 | Бит = 1 |
Data rate ok | АСП РВ не может использовать указанную скорость передачи данных | АСП РВ имеет возможность использовать указанную скорость передачи данных |
Channel frequency ok | АСП РВ не может использовать данную частоту | АСП РВ имеет возможность использовать эту частоту |
Если любой из этих 2 битов равен 0, то MAC-команда не выполнена и новый канал не создан.
MAC-команда DIChannelReq применяется для всех спецификаций физического уровня, поддерживающих MAC-команду NewChannelReq.
MAC-команда задает центральную частоту, используемую для нисходящего канала, согласно рисунку 31.

Поле "Индекс канала" (ChIndex) содержит значение индекса канала, для которого изменяется частота нисходящего канала.
АСП РВ подтверждает получение MAC-команды DIChannelReq отправкой в ответ MAC-команды DIChannelAns. MAC-команда DIChannelAns должна добавляться в поле "Параметры кадра" (FOpts) всех восходящих сообщений, пока АСП РВ не получит нисходящий пакет. Это гарантирует, что даже при наличии потери пакетов в восходящем канале, сеть всегда будет в курсе частот, используемых АСП РВ в нисходящем канале. Эта MAC-команда содержит атрибут согласно рисунку 32.

Биты поля "Статус" (Status) имеют значение согласно рисунку 33 и таблице 9.

Таблица 9
Атрибут | Бит = 0 | Бит = 1 |
Channel frequency ok | АСП РВ не может использовать эту частоту | АСП РВ имеет возможность использовать эту частоту |
Uplink frequency exists | Частота восходящего канала не определена, частота нисходящего канала может быть установлена только при наличии допустимой частоты восходящего | Частота восходящего канала допустима (корректна) |
7.5.6 MAC-команда установки параметров передачи АСП РВ (TxParamSetupReq)
MAC-команда TxParamSetupReq может быть использована для уведомления АСП РВ о максимально допустимом времени задержки (dwell time), а также максимально допустимой эффективно излучаемой изотропной мощности АСП РВ (EIRP). Атрибут MAC-команды представлен на рисунке 34.

Структура поля "ЭИИМ и время передачи" (EIRP_DwellTime) представлена на рисунке 35.

Биты [3...0] MAC-команды TxParamSetupReq кодируют максимальное значение мощности излучения (ЭИИМ) - MaxEIRP. При установлении MaxEIRP следует соблюдать региональные (национальные) параметры. Пример кодирования значения поля "ЭИИМ" (MaxEIRP) приведен на рисунке 36.

Значение поля "ЭИИМ" (MaxEIRP) соответствует верхней границе выходной мощности передатчика АСП РВ. АСП РВ не обязано передавать на этой мощности, но никогда не должно превышать указанное значение.
Биты UplinkDwellTime и DownlinkDwellTime определяют максимальное время задержки в восходящем и нисходящем каналах соответственно, которые кодируются согласно таблице 10.
Таблица 10
Кодируемое значение | Время задержки |
0 | Не ограничено |
1 | 100 мс |
Примечание - Значение допустимого максимального времени задержки определяется функциональным предназначением системы ИВ РВ и может отличаться от значения, указанного в таблице 10.
7.5.7 Вынужденное переприсоединение к сети (ForceRejoinReq)
С помощью MAC-команды ForceRejoinReq сеть запрашивает у АСП РВ немедленно передать запрос на переприсоединение к сети 0-го или 2-го типа с установленным числом и периодичностью попыток присоединения, и скоростью передачи данных. Этот запрос может быть использован сетью для инициирования процедуры передачи данных АСП РВ другому сетевому серверу в соответствии с межоператорским соглашением.
MAC-команда имеет два байта полезных данных. Параметры MAC-команды представлены на рисунке 37.

Параметры кодируются следующим образом.
Период - задержка между повторами передачи, должна быть равна:
Период = 32·2Period + Rand32,
где Rand32 - это псевдослучайное число в диапазоне целых значений [0...32].
Max_Retries - общее количество попыток, которые выполнит АСП РВ, чтобы отправить запрос на переприсоединение к сети (Rejoin-Request):
- 0: запрос на переприсоединение к сети будет отправлен только 1 раз (без повтора);
- 1: запрос на переприсоединение к сети должен быть отправлен 2 раза в общей сложности (1 + 1 повтор);
- ...7: запрос на переприсоединение к сети должен быть отправлен 8 раз (1 + 7 повторов).
Поле "Тип запроса" (RejoinType) указывает тип запроса, который будет передан АСП РВ:
- 0 или 1: должен быть передан запрос на переприсоединение к сети типа 0;
- 2: должен быть передан запрос переприсоединение к сети типа 2;
- ...7: зарезервированы для последующего использования.
DR-кадр с запросом на переприсоединение к сети должен быть передан с указанной скоростью передачи данных.
MAC-команда не имеет ответа, так как АСП РВ должно отправить запрос на переприсоединение к сети при получении MAC-команды. Первая передача сообщения с ним должна быть осуществлена непосредственно после приема MAC-команды (но сеть может не получить его). Если АСП РВ получает новую MAC-команду ForceRejoinReq прежде чем оно достигнет максимального числа повторных передач, то АСП РВ должно продолжить передачу запроса с новыми параметрами.
7.5.8 Параметры переприсоединения к сети (RejoinParamSetupReq, RejoinParamSetupAns)
С помощью MAC-команды RejoinParamSetupReq сеть может запросить АСП РВ периодически отправлять запрос на переприсоединение к сети типа 0 (RejoinRequest type 0) с заданной периодичностью отправки, определенной как время или как число восходящих кадров.
Заданная периодичность устанавливает максимальное время и количество восходящих кадров между двумя отправками запроса на переприсоединение к сети. АСП РВ может передавать этот запрос чаще заданной периодичности.
MAC-команда имеет единственный байт полезных данных (см. рисунок 38).

Параметры определены следующим образом:
MaxCountN = C = от 0 до 15.
АСП РВ должно отправлять запрос на переприсоединение к сети типа 0 не реже чем каждое 2C+4 исходящее сообщение.
MaxTimeN = T = от 0 до 15.
АСП РВ должно обеспечивать переприсоединение к сети по достижении порогового значения количества восходящих кадров. Периодичность переприсоединения, основанная на времени, является необязательной. АСП РВ, которое не может реализовать подсчет временного интервала, должно известить об этом в ответе. Ответ содержит один байт полезных данных (см. рисунок 39).

Если бит 0 равен 1, то АСП РВ принял установку периодичности в формате времени и количества восходящих кадров, в противном случае оно принимает установку периодичности только в виде ограничения количества восходящих кадров.
8.1 Передача сообщений абонентскими средствами потребителя, функционирующими в режиме реального времени
Пакеты восходящих сообщений отправляются АСП РВ на сетевой сервер по абонентской линии на ПН КА и далее по фидерной линии на РСС.
8.2 Прием сообщений абонентскими средствами потребителя, функционирующими в режиме реального времени
После каждой передачи восходящего сообщения АСП РВ должно сразу открыть окно приема.
Окно приема использует частоту, значение которой зависит от частоты в восходящем канале, и скорость приема данных, которая зависит от скорости передачи данных последнего восходящего сообщения. По умолчанию, скорость передачи нисходящего сообщения равна скорости передачи данных, использованной при передаче восходящего сообщения.
АСП РВ, относящиеся к высокомобильным объектам интернета вещей, имеют дополнительное требование к максимально допустимому времени задержки обмена сообщениями.
Для выполнения этого требования разрабатываются дополнительные меры, уменьшающие время обмена сообщениями. Такими мерами могут быть: организация очередей обработки (и передачи) сообщений в соответствии с приоритетами; обработка партий сообщений; параллельная обработка; сжатие сообщений; управление ресурсами (мониторинг и настройка) системы; использование специализированного оборудования. Возможный вариант реализации этого требования приведен в приложении Г.
8.3.1 Многоадресная рассылка сообщений высокомобильным объектам интернета вещей
АСП РВ могут принимать многоадресные нисходящие пакеты. Адрес многоадресной рассылки должен приходить на уровне приложения.
Ограничения, распространяющиеся на многоадресные сообщения:
- сообщения передаются только в нисходящем канале;
- сообщения не должны нести MAC-команды, ни в поле "Параметры кадра" (FOpts), ни в поле "Прикладные данные" (FRMPayload) на порт 0;
- биты ACK и ADRACKReq должны быть равны 0;
- поле "Тип сообщения" (FType) должно нести значение, соответствующее нисходящему сообщению, не требующему подтверждения (FType = Unconfirmed Data Down);
- бит FPending - должен указывать на то, что имеются еще многоадресные данные для отправки.
Примечание - Учитывая, что АСП РВ постоянно сохраняет активным свой приемник, то бит FPending не вызывает какого-либо конкретного поведения АСП РВ.
(справочное)
Эффект Доплера проявляется в изменении частоты сигнала при его передаче по радиолинии между взаимно перемещающимися объектами. Следует учитывать также и скорость изменения частоты сигнала (Гц/с). В настоящем стандарте эти явления обозначены как статический и динамический эффект Доплера, соответственно.
Низкоорбитальные спутники имеют очень высокие скорости относительно точки на Земле, поэтому необходимо учитывать влияние эффекта Доплера (6.2). На рисунках А.1 - А.3 приведены численные значения статического и динамического эффекта Доплера для высот орбит 300 км, 750 км и 1500 км.
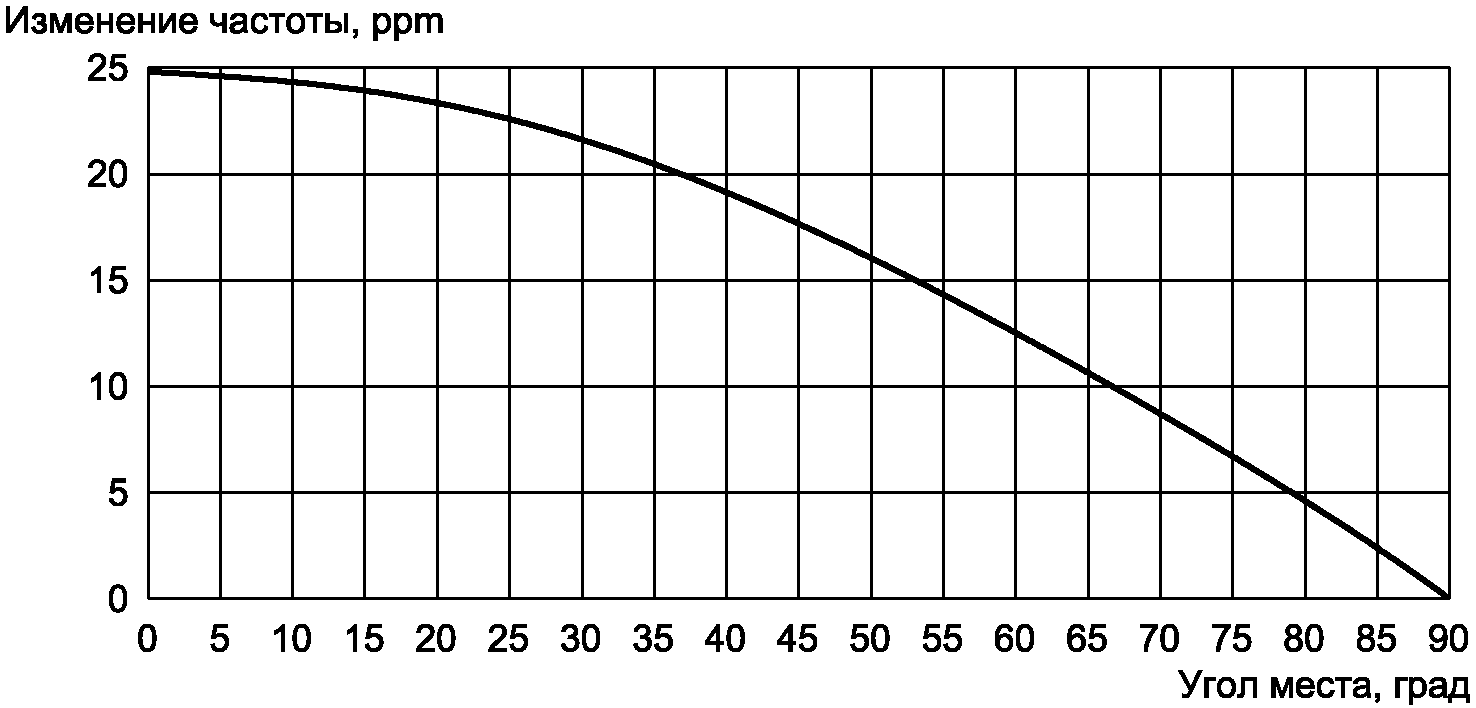
а) Изменение центральной частоты канала за счет
статического эффекта Доплера

за счет динамического эффекта Доплера
на орбите 300 км за половину максимального времени
сеанса связи (255 с)

а) Изменение центральной частоты канала за счет
статического эффекта Доплера

б) Скорость изменения центральной частоты канала (df)
за счет динамического эффекта Доплера
Рисунок А.2 - Проявление эффекта Доплера для КА
на орбите 750 км за половину максимального времени
сеанса связи (700 с)
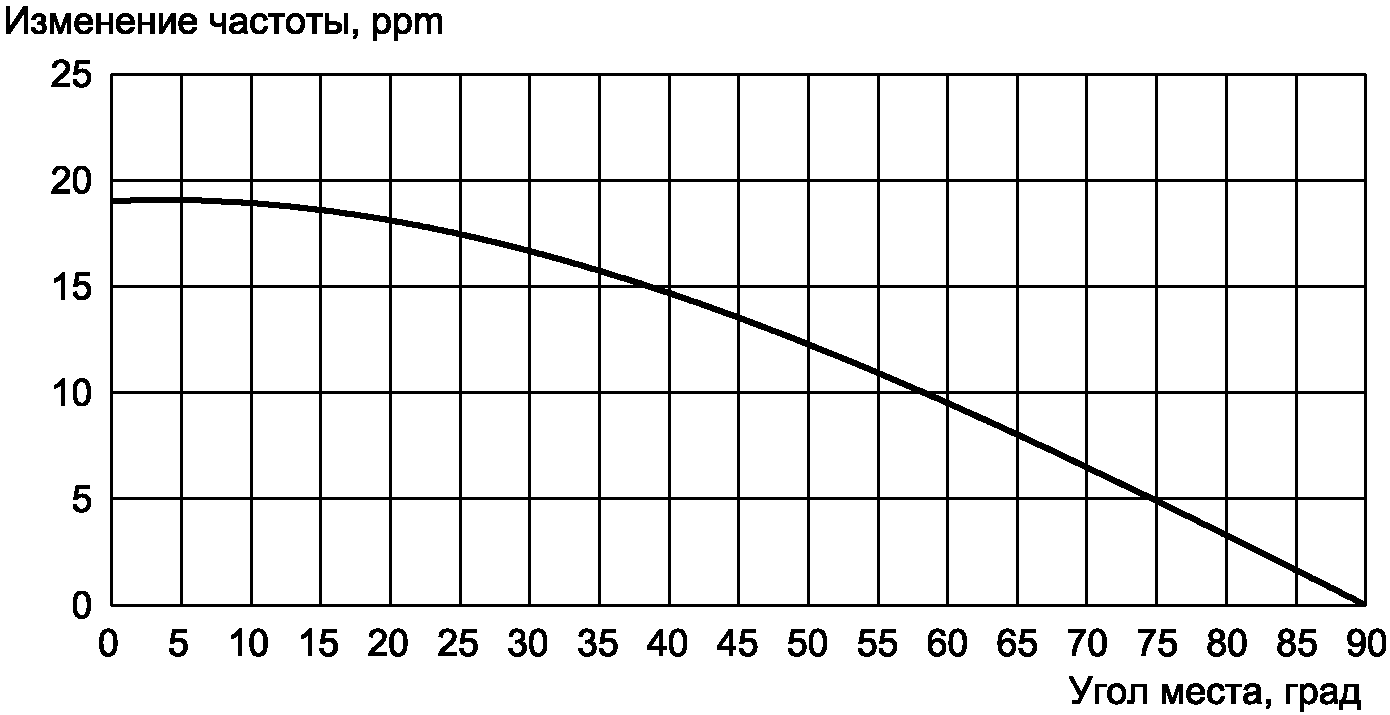
а) Изменение центральной частоты канала за счет
статического эффекта Доплера
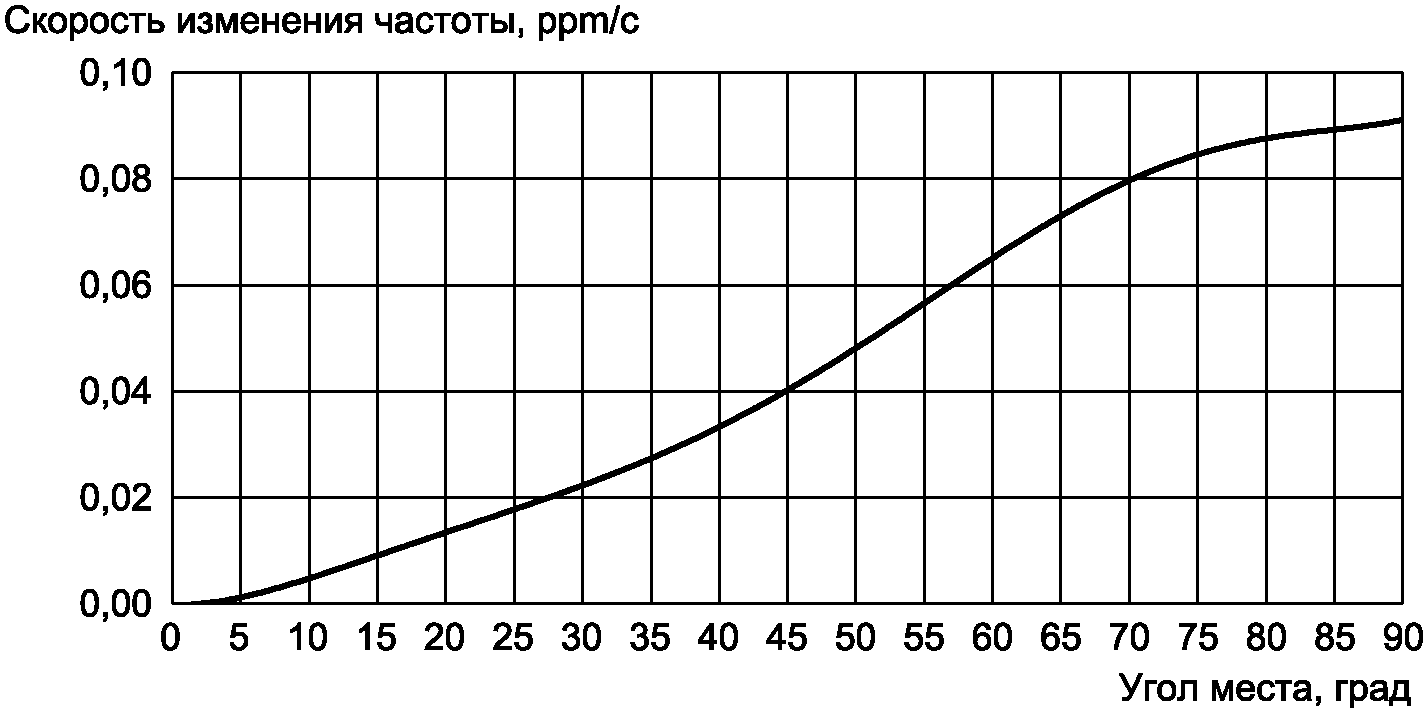
за счет динамического эффекта Доплера
на орбите 1500 км за половину максимального времени
сеанса связи (900 с)
Статический эффект приводит к изменению центральной частоты сигнала в зависимости от высоты орбиты КА и рабочего угла места АСП РВ и частоты канала. В таблице А.1 приведена рекомендуемая минимальная ширина полос частот каналов в зависимости от высоты орбиты и рабочей частоты канала в диапазонах частот ISM и S-диапазоне при минимальном рабочем угле АСП РВ, равном 25°.
Таблица А.1
Высота орбиты, км | Минимально допустимые полосы частот каналов (кГц) для рабочей частоты | |||
433 МГц | 868 МГц | 915 МГц | 2200 МГц | |
300 | 39,0 | 78,1 | 82,4 | 198,0 |
750 | 34,8 | 69,8 | 76,3 | 176,9 |
1500 | 30,3 | 60,8 | 64,1 | 154,0 |
На частотах выше 2 ГГц необходимо применять каналы с максимально возможной полосой частот 500 кГц.
Динамический эффект Доплера может повлиять на достоверность передачи пакетов в радиолинии, поскольку нарушается устойчивость циклического сдвига символов по времени (CV) и устойчивость символов к циклическому смещению по частоте dF = W/2SF.
Динамический эффект, обусловленный скоростью изменения частоты (Гц/с) df [см. рисунки А.1 б) - А.3 б)], достигает своего максимума в области подспутниковой точки. В период сеанса связи значение df есть функция от угла места  (см. рисунок В.1).
(см. рисунок В.1).
Рекомендуемое допустимое значение дрейфа частоты сигнала  для SF = 5, 6, 7 за время распространения пакета ToA (см. таблицу В.1). Указанные выше условия для рекомендуемого значения
для SF = 5, 6, 7 за время распространения пакета ToA (см. таблицу В.1). Указанные выше условия для рекомендуемого значения  могут привести к ограничению допустимого объема пакета на физическом уровне ниже максимального их объема, определяемого для соответствующего коэффициента расширения спектра сигнала SF в зависимости от высоты орбиты КА и рабочей частоты канала.
могут привести к ограничению допустимого объема пакета на физическом уровне ниже максимального их объема, определяемого для соответствующего коэффициента расширения спектра сигнала SF в зависимости от высоты орбиты КА и рабочей частоты канала.
для SF = 5, 6, 7 за время распространения пакета ToA (см. таблицу В.1). Указанные выше условия для рекомендуемого значения (справочное)
В данном случае подразумевается, что ПН КА выполнена с обработкой и регенерацией информации. Ошибка на бит (Pb) при передаче информации в канале фидерной линии (PbФЛ) принята много меньше ошибки в канале абонентской радиолинии PbАЛ  .
.
.Значение C/N (дБ) на линии  :
:
:C/N = PКА + GКА + GАСП РВ - L - 10 lg(kTАСП РВW) - Lм.
Значение C/N (дБ) на линии  :
:
:C/N = PАСП РВ + GАСП РВ + GКА - L - 10 lg(kTКАW) - Lм,
где k = 1,38·10-23 - постоянная Больцмана, J/K;
L = 32,45 + 20 lg(f) + 20 lg(d) - потери в радиолинии с учетом наклонной дальности d, дБ;
PКА - мощность передатчика канала в луче КА, дБм;
GКА - коэффициент усиления луча антенны КА в направлении АСП РВ, дБи;
PАСП РВ - мощность передатчика АСП РВ, дБм;
GАСП РВ - коэффициент усиления антенны АСП РВ в направлении КА, дБи;
TКА - эквивалентная температура шума приемного канала КА, К;
TАСП РВ - эквивалентная температура шума приемного канала АСП РВ, К;
f - частота, МГц;
d - наклонная дальность между КА и АСП РВ, км;
Lм - дополнительные потери (поляризационные, ионосферные, климатические и т.п.);
W - полоса частот канала, Гц.
Взаимосвязь между C/N и Eb/No:
C/N = Eb/No - 10 lg(2SF/SF) - 10 lg(4/(4 + CR)).
Запас энергетического бюджета составляет  (без учета внутрисистемных и межсистемных помех). Пороговые значения (C/N)п для разных параметров кода FEC и линейной частотной модуляции с расширением спектра приведены в таблице Б.1.
(без учета внутрисистемных и межсистемных помех). Пороговые значения (C/N)п для разных параметров кода FEC и линейной частотной модуляции с расширением спектра приведены в таблице Б.1.
(без учета внутрисистемных и межсистемных помех). Пороговые значения (C/N)п для разных параметров кода FEC и линейной частотной модуляции с расширением спектра приведены в таблице Б.1.Таблица Б.1
SF | (C/N)п для Pb = 10-4, дБ | |||
FEC = 4/5 | FEC = 4/6 | FEC = 4/7 | FEC = 4/8 | |
7 | -7,1 | -7,9 | -8,5 | -9,1 |
6 | -5,0 | -5,8 | -6,4 | -7,0 |
5 | -2,5 | -3,3 | -3,9 | -4,5 |
В таблицах Б.2 - Б.4 представлены примеры оценки энергетического бюджета абонентских радиолиниий. Угловой сектор обслуживания луча ПН КА составляет 120°; 108,4° и 94,4° для высот орбит КА 300 км, 750 км и 1500 км соответственно. Такой сектор обеспечивает формирование гарантированной рабочей зоны на Земле при условии значения рабочего угла места для АСП РВ не менее 25°.
Таблица Б.2
радиолинии для высоты орбиты КА 300 км
Параметры радиолинии |  |  | ||
В надире | Граница | В зените | Граница | |
Полоса частот канала (W), кГц | 250 | 250 | 250 | 250 |
Частота, МГц | 868 | 868 | 868 | 868 |
Усиление антенны, дБи | 14,0 | 12,7 | 2,0 | -0,5 |
ЭИИМ на канал, дБм | 37,7 | 35,5 | 25,0 | 22,5 |
Наклонная дальность d (орбита 300 км, угол 25°), км | 300 | 648 | 300 | 648 |
Потери в радиолинии в свободном пространстве (L), дБ | 140,8 | 147,4 | 140,8 | 147,4 |
Поляризационные потери (Lм), дБ | 3,0 | 3,0 | 3,0 | 3,0 |
Эквивалентная температура шума приемного канала, К | 1000 | 1000 | 500 | 500 |
Добротность приемного канала Gпрм/Tш, дБ/К | -28,0 | -30,5 | -10,0 | -13,1 |
Отношение C/N, дБ | 10,6 | -0,8 | 15,8 | 3,5 |
Таблица Б.3
Пример оценки энергетического бюджета абонентской
радиолинии для высоты орбиты КА 750 км
Параметры радиолинии |  |  | ||
В надире | Граница | В зените | Граница | |
Полоса частот канала (W), кГц | 250 | 250 | 250 | 250 |
Частота, МГц | 868 | 868 | 868 | 868 |
Усиление антенны, дБи | 17,0 | 13,9 | 0,0 | 0,0 |
ЭИИМ на канал, дБм | 40,0 | 36,9 | 16,1 | 16,1 |
Наклонная дальность d (орбита 750 км, угол 25°), км | 750 | 1475 | 750 | 1475 |
Потери в радиолинии в свободном пространстве (L), дБ | 148,7 | 154,6 | 148,7 | 154,6 |
Поляризационные потери (Lм), дБ | 3,0 | 3,0 | 3,0 | 3,0 |
Эквивалентная температура шума приемного канала, К | 1000 | 1000 | 500 | 500 |
Добротность приемного канала Gпрм/Tш, дБ/К | -28,0 | -30,5 | -10,0 | -12,5 |
Отношение C/N, дБ | 4,9 | -6,6 | 7,9 | -2,9 |
Таблица Б.4
радиолинии для высоты орбиты КА 1500 км
Параметры радиолинии |  |  | ||
В надире | Граница | В зените | Граница | |
Полоса частот канала (W), кГц | 250 | 250 | 250 | 250 |
Частота, МГц | 868 | 868 | 868 | 868 |
Усиление антенны, дБи | 17,8 | 15,0 | 0,0 | 0,0 |
ЭИИМ на канал, дБм | 40,8 | 38,0 | 16,1 | 16,1 |
Наклонная дальность d (орбита 1500 км, угол 25°), км | 1500 | 2657 | 1500 | 2657 |
Потери в радиолинии в свободном пространстве (L), дБ | 154,7 | 159,7 | 154,7 | 159,7 |
Поляризационные потери (Lм), дБ | 3,0 | 3,0 | 3,0 | 3,0 |
Эквивалентная температура шума приемного канала, К | 1000 | 1000 | 500 | 500 |
Добротность приемного канала Gпрм/Tш, дБ/К | -28,0 | -30,5 | -9,2 | -12,2 |
Отношение C/N, дБ | -0,3 | -10,5 | 2,7 | -7,5 |
В примерах принят вариант применения 16-лучевой антенной системы ПН КА. Следует отметить, что для максимально отклоненных лучей ПН КА значение C/N на самой границе лучей может быть на 1 - 3 дБ ниже указанных, поскольку искажается форма ДН луча.
Как следует из анализа значений C/N, представленных в таблицах Б.2 - Б.4, дефицит бюджета имеет место на линии  и
и  на границе зоны обслуживания. Увеличение C/N рекомендуется обеспечивать за счет использования приемной многолучевой антенно-фидерной системы ПН КА. Причем все лучи имеют идентичный частотный и поляризационный план распределения частотных каналов в выделенной полосе рабочих частот.
на границе зоны обслуживания. Увеличение C/N рекомендуется обеспечивать за счет использования приемной многолучевой антенно-фидерной системы ПН КА. Причем все лучи имеют идентичный частотный и поляризационный план распределения частотных каналов в выделенной полосе рабочих частот.
и на границе зоны обслуживания. Увеличение C/N рекомендуется обеспечивать за счет использования приемной многолучевой антенно-фидерной системы ПН КА. Причем все лучи имеют идентичный частотный и поляризационный план распределения частотных каналов в выделенной полосе рабочих частот.Увеличение числа лучей КА повышает его канальную емкость и уменьшает количество потенциальных источников внешних помех за счет уменьшения локальных рабочих зон в пределах зоны обслуживания КА.
Примечания
1 Не учтены потери за счет мерцаний (сцинтилляций в ионосфере), которые могут составлять для 1% времени наихудшего месяца наивысшего по солнечной активности года в пределах от 0 дБ примерно до 28,5 дБ в зависимости от обслуживаемого региона Земли (дополнительные сведения приведены в [5]).
2 С учетом статистической обработки для 99% времени дополнительные потери в абонентской радиолинии за счет мерцаний рекомендуется принять 3,4 дБ в диапазоне частот 863 ...... 928 МГц для экваториальной зоны обслуживания (+/- 20°), для диапазона частот 2 ГГц - примерно 2 дБ, а для диапазона частот 5 ГГц - не более 0,5 дБ.
3 Поляризационные потери приняты 3 дБ (наихудший случай с учетом, что АФС ПН КА формирует сигналы круговой поляризации в пределах ширины диаграммы направленности основного лепестка).
4 При расчете не учтены внешние помехи от РЭС иных систем и внутрисистемные помехи, оценка которых является отдельной задачей, решение которой зависит от конкретных системных и технических условий реализации и эксплуатации НСС.
(справочное)
ПОТЕНЦИАЛЬНАЯ ЕМКОСТЬ АБОНЕНТСКОГО КАНАЛА
Параметры абонентского канала на физическом уровне и соотношения для их численной оценки представлены в таблице В.1. Эквивалентная скорость передачи данных в абонентском канале Rb зависит от принятой полосы частот канала W и коэффициента расширения спектра сигнала SF (при наличии), который в свою очередь определяется достигнутым значением C/N на входе демодулятора и требуемой величиной запаса энергетического бюджета  относительного принятого порогового значения отношения сигнал/шум (C/N)п.
относительного принятого порогового значения отношения сигнал/шум (C/N)п.
Таблица В.1
и соотношения для их численной оценки
Обозначение | Параметр | Размерность | Соотношение или значение |
W | Полосы частот канала (рекомендуемые для спутниковой системы): | кГц | |
для частот ниже 3 ГГц | 250; 500 | ||
для частот выше 3 ГГц, но ниже 6 ГГц | 500 | ||
SF | Коэффициент расширения спектра сигнала | разы | 5; 6; 7 |
Rb | Битовая скорость в канале | бит/с | = SF·(W/2SF)·FEC |
Rs | Символьная скорость в канале | символ/с | = W/2SF |
Rc | Чиповая скорость | чип/с | = Rs2SF |
Ns | Число битов в символе | бит | = SF |
Ts | Длительность символа | с | = (2SF/W)·CR |
n | Число символов в преамбуле пакета на физическом уровне | символ | 6 или 8 |
SV | Число признаков символа | число | От 0 до 2SF - 1 |
CV | Циклический сдвиг символов во времени | с | = (SV/2SF)·Ts |
dF | Циклический сдвиг символов по частоте | Гц | W/2SF |
C/N | Отношение мощности сигнала к мощности шума на входе демодулятора | дБ | = Eb/No (Rb/W) |
Eb/No | Отношение энергии бита к спектральной плотности мощности шума | дБ | = C/N (2SF/SF)/FEC |
Es/No | Отношение энергии символа к спектральной плотности мощности шума | дБ | = Eb/No + 10 lg (SF) |
FEC | Параметр кода | разы | = 4/(4 + CR) |
CR | Коэффициент скорости кодирования | число | = 1, 2, 3, 4 |
ToA | Время передачи пакета в узкополосном канале (без учета задержки распространения сигнала в радиолинии) | с |  , ,для SF = 7,  , ,для SF <= 6 |
Допустимый дрейф частоты сигнала за время ToA | Гц | < W/(3·2SF) | |
NF | Коэффициент шума приемника (при нормальной температуре среды) | дБ | = 10 lg(Tш/290 + 1) |
Tш | Собственная температура шума приемника | К | = (ant lgNF - 1)·290 |
Pb | Вероятность ошибки на бит (рекомендуемая) | - | Не более 10-3 |
S | Чувствительность приемника | дБм | S = C/N - 205 + 10 lgW + NF |
Q | Объем пакета приложения (FRMPayload) | байт | До 242 |
Емкость абонентского канала взаимосвязана с эквивалентной скоростью передачи информации. В данном случае используется режим TDD, поэтому емкость канала следует оценивать отдельно для направлений  и
и  , обозначенных соответственно
, обозначенных соответственно  и
и  . Для сетей ИВ РВ трафик на линии
. Для сетей ИВ РВ трафик на линии  значительно превышает трафик на линии
значительно превышает трафик на линии  и всегда выполняется соотношение
и всегда выполняется соотношение  (обычно максимальное значение
(обычно максимальное значение  ). В качестве численного значения предельной емкости абонентского канала
). В качестве численного значения предельной емкости абонентского канала  рекомендуется принять число пакетов
рекомендуется принять число пакетов  физического уровня, которое можно передать по абонентскому каналу в направлении
физического уровня, которое можно передать по абонентскому каналу в направлении  за максимальное время сеанса связи Tmax. Время сеанса связи - это время, которое отдельный КА из состава орбитальной группировки НСС наблюдается в зоне обслуживания на Земле, границы которой определены заданным минимальным рабочим углом места АСП РВ
за максимальное время сеанса связи Tmax. Время сеанса связи - это время, которое отдельный КА из состава орбитальной группировки НСС наблюдается в зоне обслуживания на Земле, границы которой определены заданным минимальным рабочим углом места АСП РВ  , что поясняется на рисунке В.1. На рисунке В.2 в качестве примера приведено время оборота КА вокруг земли, а на рисунке В.3 показаны значения Tmax для
, что поясняется на рисунке В.1. На рисунке В.2 в качестве примера приведено время оборота КА вокруг земли, а на рисунке В.3 показаны значения Tmax для  применительно к приполярным орбитам.
применительно к приполярным орбитам.
и , обозначенных соответственно значительно превышает трафик на линии и всегда выполняется соотношение (обычно максимальное значение рекомендуется принять число пакетов за максимальное время сеанса связи Tmax. Время сеанса связи - это время, которое отдельный КА из состава орбитальной группировки НСС наблюдается в зоне обслуживания на Земле, границы которой определены заданным минимальным рабочим углом места АСП РВ применительно к приполярным орбитам.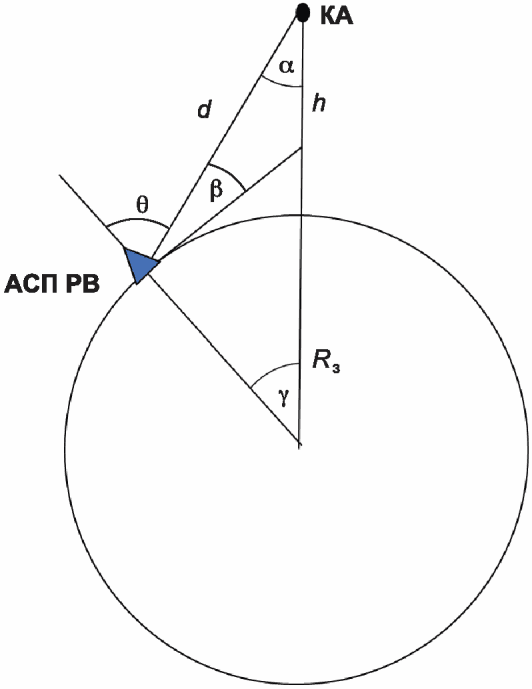
в процессе сеанса связи

от высоты орбиты


для угла места 25° и  для угла места 7°
для угла места 7°
для угла места 7°в зависимости от высоты орбиты
Орбитальные параметры, указанные на рисунке В.1, имеют между собой следующую взаимосвязь:



где  - текущий угол видимости АСП РВ из точки расположения КА на орбите;
- текущий угол видимости АСП РВ из точки расположения КА на орбите;
h - высота орбиты КА над Землей;
Rз = 6371 км - средний радиус Земли.
КА оборачивается вокруг Земли за время To, а максимальное время сеанса связи с АСП РВ Tmax составляет:

где To = 84,4{[(Rз + h)/Rз]3}1/2 - время оборота КА вокруг Земли, мин;
Время, требуемое для передачи одного пакета объемом Q, составляет ToA. Соответственно, за время сеанса связи Tmax потенциально может быть передано в одном абонентском канале не более No <= Tmax/ToA пакетов, если все пакеты имеют равный объем Q. Однако, объем пакетов, генерируемых АСП РВ, разный, зависит от заданного сервиса ИВ и назначения пакета. Причем каждый из АСП РВ может генерировать пакеты с разными интервалами Tint. Соответственно, обобщенное значение емкости абонентского канала, выраженное в числе одновременно обслуживаемых АСП РВ, однозначно указать невозможно.
АСП РВ может передавать пакеты по мере необходимости (или наличия события) или с заданным фиксированным интервалом времени.
Для формализации случайного процесса передачи пакетов введено понятие цикличности работы (DC) АСП РВ:
DC = ToA/Tint,
где ToA - время передачи пакета объемом Q в канале с эквивалентной битовой скоростью Rb;
Tint - интервал времени между передачей пакетов.
Значение максимально допустимой цикличности устанавливается в нормативно-правовых документах национальных администраций связи. Цикличность передачи пакетов DC на линии  не должна превышать значения, установленного национальной администрацией связи для наземных сетей ИВ РВ, которое выражено в %.
не должна превышать значения, установленного национальной администрацией связи для наземных сетей ИВ РВ, которое выражено в %.
не должна превышать значения, установленного национальной администрацией связи для наземных сетей ИВ РВ, которое выражено в %.Вероятность коллизии пакетов (при  ) в одном абонентском канале:
) в одном абонентском канале:
) в одном абонентском канале:
где  - число АСП РВ в региональной (национальной) сети при условии, что за время Tint каждый АСП РВ генерирует не более одного пакета.
- число АСП РВ в региональной (национальной) сети при условии, что за время Tint каждый АСП РВ генерирует не более одного пакета.
При передаче пакетов от АСП РВ с фиксированным интервалом времени обычно Tint соизмеримо с ToA. В этом случае для каждой из групп АСП РВ необходимо установить (задать) допустимую круговую задержку RTT. Для каждой из таких групп должен быть назначен свой частотный канал (каналы). Значение Tint должно быть не более RTT/2. Временной интервал RTT/2 принимается равным кадру Tk = Tint, в период которого каждое АСП РВ осуществляет последовательную передачу пакетов. После окончания передачи пакета АСП РВ сразу переходит в режим приема. Это требует  синхронизации для кадров и окон передачи/приема АСП РВ, рекомендуемая точность синхронизации - +/- 0,5 мс. Процесс синхронизации передачи пакетов должен быть обеспечен сетевым сервером.
синхронизации для кадров и окон передачи/приема АСП РВ, рекомендуемая точность синхронизации - +/- 0,5 мс. Процесс синхронизации передачи пакетов должен быть обеспечен сетевым сервером.
синхронизации для кадров и окон передачи/приема АСП РВ, рекомендуемая точность синхронизации - +/- 0,5 мс. Процесс синхронизации передачи пакетов должен быть обеспечен сетевым сервером.В таблице В.2 в качестве примера приведены значения ряда основных параметров для типового абонентского канала с линейной частотной модуляцией и расширением спектра сигнала в полосе частот W = 500 кГц.
Таблица В.2
Скорость | Коэффициент расширения спектра SF | M = 2SF | Объем пакета (FRMPayload) макс, байт | Rb, бит/с FEC = 4/5 | C/N, дБ FEC = 4/5 Pb = 10-4 | S <*>, дБм (NF = 1,5 дБ) | ToA <**>, мс FEC = 4/5 пакет 51 байт | ToA <**>, мс FEC = 4/5 пакет 115 байт | ToA <**>, мс FEC = 4/5 пакет 242 байта |
DR5 | 7 | 128 | 242 | 21876 | -7,1 | -121,0 | 25,7 | 48,9 | 94,8 |
DR12 | 6 | 64 | 242 | 37500 | -5,0 | -117,5 | 12,8 | 27,5 | 53,6 |
DR13 | 5 | 32 | 242 | 62500 | -2,5 | -115,0 | 6,8 | 15,5 | 32 |
<*> Данные соответствуют [5]. | |||||||||
В одном луче ПН КА имеется n абонентских частотных каналов. При включении на передачу одного из них все стальные не могут осуществлять прием сигналов (режим TDD), так как на вход приемника будет поступать помеха с высоким уровнем - передаваемый сигнал. Соответственно, необходимо принять все меры для минимизации помех между частотными каналами. В том числе не исключается вариант с частотным разделением передачи пакетов от АСП РВ и приема пакетов АСП РВ, что эквивалентно режиму FDD.
(справочное)
В СИСТЕМАХ ИНТЕРНЕТА ВЕЩЕЙ
Для реализации режима реального времени в системах ИВ могут быть использованы следующие способы:
а) снижение вероятности коллизий и уменьшение времени задержки за счет установки режимов доступа к каналам передачи данных:
1) множественный доступ с временным разделением (Time Division Multiple Access, TDMA). В этом случае временной ресурс канала делится на временные слоты, и каждому АСП РВ назначается определенный временной слот для передачи данных. Это помогает избежать коллизий и обеспечивает более предсказуемую задержку;
2) множественный доступ с частотным разделением (Frequency Division Multiple Access, FDMA). Использование разных частотных каналов для передачи данных от АСП РВ позволяет снизить количество коллизий и обеспечить более стабильную передачу, что важно для приложений, требующих минимальной задержки;
3) множественный доступ с контролем несущей и предотвращением коллизий (Carrier Sense Multiple Access with Collision Avoidance, CSMA/CA). Этот метод включает в себя механизм прослушивания канала перед передачей данных. АСП РВ проверяет, свободен ли канал, прежде чем начать передачу, что способствует уменьшению задержки при передаче данных;
4) комбинация элементов TDMA, FDMA и CSMA/CA. Такой метод используется для достижения более рационального баланса между емкостью канала и временными задержками;
б) внедрение механизмов качества обслуживания (Quality of Service Mechanisms). Они обеспечивают приоретизацию трафика, требующего минимальных задержек. Введение приоритетов для различных типов данных обеспечит обработку наиболее критичных по времени передачи пакетов в первую очередь;
в) применение параллельной связи. Линейно-частотная модуляция с расширенным спектром позволяет передавать данные на нескольких частотах одновременно. Такое частотное разделение может быть использовано для организации нескольких параллельных потоков данных.
Реализация режима реального времени требует комплексного подхода, включающего как технические решения, так и организационные меры, направленные на оптимизацию существующей инфраструктуры. Применение этих решений и мер может потребовать изменений в сетевой архитектуре и протоколах, используемых в наземных сетях, при их адаптации для спутниковой сети. Применение такого подхода должно быть тщательно спланировано, чтобы соответствовать требованиям конкретного приложения и характеристикам спутниковой сети.
Применительно к таким высокомобильным объектам ИВ, как беспилотные воздушные суда (БВС), может быть реализован следующий подход. Для каждого типа (группы) БВС сетевой сервер назначает свой частотный канал TDD (или FDD - разные частоты для передачи и приема) с временным разделением для организации множественного доступа (аналог TDMA). Кадры синхронизируются для режима передачи информации от БВС в направлении сетевого сервера. Длительность кадра  зависит от требования к круговой задержке RTT. Круговая задержка RTT вычисляется как интервал времени от момента начала передачи информации от БВС до момента окончания приема информации на БВС. RTT определяет реакцию системы на событие, что в свою очередь определяется скоростью полета БВС и условиями их эшелонирования. Оператором системы (линий контроля и управления C2) устанавливается требуемая цикличность передачи телеметрической информации от БВС (зависит от скорости БВС и требований эшелонирования), поступающей на сервер приложений.
зависит от требования к круговой задержке RTT. Круговая задержка RTT вычисляется как интервал времени от момента начала передачи информации от БВС до момента окончания приема информации на БВС. RTT определяет реакцию системы на событие, что в свою очередь определяется скоростью полета БВС и условиями их эшелонирования. Оператором системы (линий контроля и управления C2) устанавливается требуемая цикличность передачи телеметрической информации от БВС (зависит от скорости БВС и требований эшелонирования), поступающей на сервер приложений.
Длительность кадров  может увеличиваться при переходе от обслуживания одного типа БВС к обслуживанию другого, движущегося с меньшей скоростью. Для осуществления информационного обмена БВС устанавливается режим постоянного приема (класс C для технологии LoRa). Каждому БВС от сетевого сервера назначается свой временной слот Tx внутри кадра для передачи пакета телеметрии длительностью
может увеличиваться при переходе от обслуживания одного типа БВС к обслуживанию другого, движущегося с меньшей скоростью. Для осуществления информационного обмена БВС устанавливается режим постоянного приема (класс C для технологии LoRa). Каждому БВС от сетевого сервера назначается свой временной слот Tx внутри кадра для передачи пакета телеметрии длительностью  (см. рисунок Г.1). После передачи пакета в заданном слоте Tx открывается приемное окно Rx, которое остается открытым до начала передачи пакета в следующем кадре (в этом случае следует использовать разные значения коэффициента расширения SF для одновременной передачи данных разными смежными БВС). Для минимизации помех целесообразно ограничить время работы приемного окна, сделав его равным времени передачи
(см. рисунок Г.1). После передачи пакета в заданном слоте Tx открывается приемное окно Rx, которое остается открытым до начала передачи пакета в следующем кадре (в этом случае следует использовать разные значения коэффициента расширения SF для одновременной передачи данных разными смежными БВС). Для минимизации помех целесообразно ограничить время работы приемного окна, сделав его равным времени передачи  .
.

а) Временное разделение канала передачи на кадры и слоты

б) Иллюстрация временного разделения процессов передачи
и приема для пяти БВС
Tx - передача от БВС в направлении сетевого сервера, расположенного в составе РСС;
Rx - прием информации на БВС, передаваемой адресно от сетевого сервера, расположенного в составе РСС;
А ... Д - условное обозначение БВС
и приема данных БВС
Длительность слота передачи  зависит от числа БВС (N), работа которых поддерживается одновременно в одном частотном канале
зависит от числа БВС (N), работа которых поддерживается одновременно в одном частотном канале  , где 1 мс - защитный интервал (может быть установлено иное значение с учетом точности временной синхронизации). При этом следует учитывать заданный объем информации пакета Q (байт), передаваемой от БВС в направлении сетевого сервера, поскольку скорость канала V ограничена и должно выполняться условие (Q/V) << RTT.
, где 1 мс - защитный интервал (может быть установлено иное значение с учетом точности временной синхронизации). При этом следует учитывать заданный объем информации пакета Q (байт), передаваемой от БВС в направлении сетевого сервера, поскольку скорость канала V ограничена и должно выполняться условие (Q/V) << RTT.
, где 1 мс - защитный интервал (может быть установлено иное значение с учетом точности временной синхронизации). При этом следует учитывать заданный объем информации пакета Q (байт), передаваемой от БВС в направлении сетевого сервера, поскольку скорость канала V ограничена и должно выполняться условие (Q/V) << RTT.Например (см. рисунок Г.1), сетевой сервер назначает частотный канал для однотипных БВС и устанавливает цикличность передачи пакетов передачи - 1 раз каждые 100 мс. Внутри кадра назначаются слоты. Длительность слотов для передачи пакета Tx (мс) назначается из расчета [(100/N) - 1], где N - число БВС, а 1 - защитный интервал (в мс). Приемное окно каждого БВС открывается сразу по завершении передачи пакета и остается открытым 19 мс или до следующей передачи пакета, т.е. 80 мс, если приняты специальные меры по минимизации помех. Причем, длительность слота, объем пакета и скорость в канале должны быть взаимоувязаны и учитывать ограничение объема пакета, предусмотренное протоколом обмена данными (в данном случае не более 242 байт).
Временная синхронизация обеспечивается от системы ГЛОНАСС и/или от иных внешних источников временных меток, транслируемых сетевым сервером, точность которых должна быть достаточна для обеспечения заданного защитного временного интервала между слотами.
ИСО/МЭК 30165:2021 | Интернет вещей (IoT). Платформа интернета вещей в реальном времени | |
ИСО/МЭК 20924:2024 | Интернет вещей и цифровой двойник. Словарь | |
Регламент радиосвязи Международного союза электросвязи, издание 2024 г. | ||
ITU-T Y.4480 (11/2021) | Протокол с низким энергопотреблением для глобальных беспроводных сетей | |
ITU-R P.531-14 (08/2019) | Данные ионосферного распространения и методы прогнозирования, необходимые для проектирования спутниковых сетей и систем | |
УДК 004.738:006.354 | ОКС 35.020 |
Ключевые слова: информационные технологии, интернет вещей реального времени | |