СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ введен в действие с 30.04.2025 на период до 30.04.2026 (Приказ Росстандарта от 28.04.2025 N 9-пнст).
Название документа
"ПНСТ 1001-2025. Предварительный национальный стандарт Российской Федерации. Информационные технологии. Тестирование роботов на модельной сети"
(утв. и введен в действие Приказом Росстандарта от 28.04.2025 N 9-пнст)
"ПНСТ 1001-2025. Предварительный национальный стандарт Российской Федерации. Информационные технологии. Тестирование роботов на модельной сети"
(утв. и введен в действие Приказом Росстандарта от 28.04.2025 N 9-пнст)
Содержание
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 28 апреля 2025 г. N 9-пнст
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ
ТЕСТИРОВАНИЕ РОБОТОВ НА МОДЕЛЬНОЙ СЕТИ
Information technology.
The testing of the robotics on the model network
(ITU-T Q.TSN, The testing of the robotics on the model
network, MOD)
ПНСТ 1001-2025
ОКС 35.020
Срок действия
с 30 апреля 2025 года
до 30 апреля 2026 года
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего образования "Санкт-Петербургский государственный университет телекоммуникаций им. проф. М.А. Бонч-Бруевича" (СПбГУТ) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 022 "Информационные технологии"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 апреля 2025 г. N 9-пнст
4 Настоящий стандарт является модифицированным по отношению к проекту международного стандарта ITU-T Q.TSN "Тестирование роботов на модельной сети" (ITU-T Q.TSN "The testing of the robotics on the model network", MOD) путем изменения отдельных фраз (слов, значений показателей, ссылок), которые выделены в тексте курсивом.
Наименование настоящего стандарта изменено относительно наименования указанного проекта международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5).
Примеры тестов приведены в дополнительном приложении ДА.
Сопоставление структуры настоящего стандарта со структурой примененного в нем проекта международного стандарта приведено в дополнительном приложении ДБ
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее, чем за 4 мес до истечения срока его действия, разработчику настоящего стандарта по адресу: 193232 Санкт-Петербург, пр. Большевиков, д. 22, корп. 1 и в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва, Пресненская набережная, д. 10, стр. 2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
В настоящее время роботы все чаще применяются в различных областях народного хозяйства (в промышленности, сельском хозяйстве, медицине и т.д.), в связи с чем все большее распространение получают услуги удаленного управления роботами по сети связи. Одной из важных задач при практической реализации подобных услуг является проведение комплексного тестирования. Такое тестирование может проводиться на стадии разработки, лабораторных или иных испытаний, при вводе в эксплуатацию и т.д.
В стандарте представлены структура и состав модельной сети для тестирования удаленного управления роботами с возможностью дистанционного контроля выполнения поступающих роботу команд.
В настоящем стандарте описаны архитектура и характеристики модельной сети нового поколения, предназначенной для исследований, обучения и тестирования в области дистанционного управления робототехникой по сети.
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ГОСТ Р 60.0.0.4/ИСО 8373:2021 Роботы и робототехнические устройства. Термины и определения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
В настоящем стандарте применены термины по ГОСТ Р 60.0.0.4, а также следующий термин с соответствующим определением:
3.1 узел постановки помех (jamming node): Узел модельной сети, обеспечивающий контролируемое ослабление передаваемого сигнала и/или внесение помех, а также потерю или дублирование передаваемых пакетов данных, внесение дополнительной сетевой задержки, джиттера и т.д.
В настоящем стандарте применены следующие сокращения:
ПМИ - программа и методика испытаний;
ПО - программное обеспечение;
УПП - узел постановки помех;
IPDV - вариация задержки IP-пакетов (IP packet delay variation);
IPER - коэффициент ошибочных IP-пакетов (IP packet error ratio);
IPLR - коэффициент потери IP-пакетов (IP packet loss ratio);
IPTD - задержка передачи IP-пакетов (IP packet transfer delay);
QUIC - протокол для быстрой передачи данных поверх UDP (quick UDP internet connections);
TCP - протокол управления передачей (transmission control protocol);
UDP - протокол пользовательских датаграмм (user datagram protocol).
На рисунке 1 показана структурная схема модельной сети тестирования дистанционного управления роботами (на примере робота-манипулятора).
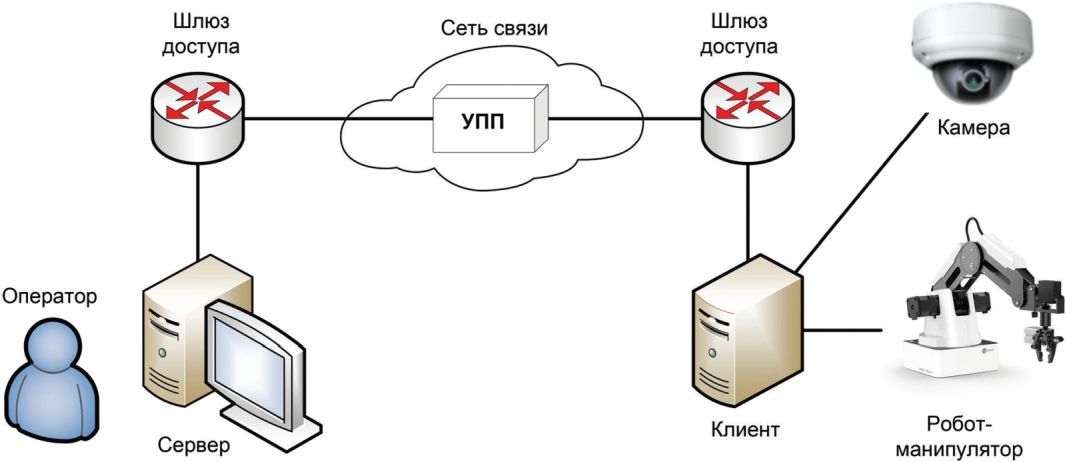
Команды управления передаются с сервера по сети связи клиенту. Клиент обеспечивает подключение и непосредственное управление роботом-манипулятором. Оператор контролирует работу сервера и клиента, параметры работы сети связи, текущее состояние системы и выполнение поступающих команд роботом-манипулятором визуально или с помощью камеры.
В качестве дополнительного узла для внесения затухания в канал на физическом уровне, внесения потери или дублирования пакетов данных, внесения дополнительной сетевой задержки и джиттера и т.д. следует использовать УПП.
Кроме того, между сервером и клиентом с помощью специализированного программного обеспечения могут быть дополнительно созданы фоновые потоки сетевого трафика, имитирующего наиболее типичные для соответствующего типа сетей (например, VoIP, потоки данных и т.п.).
В ходе тестирования рекомендуется измерять параметры по [1], такие как:
- задержка передачи IP-пакетов (IPTD);
- вариации задержек IP-пакетов (IPDV);
- коэффициент ошибочных IP-пакетов (IPER);
- коэффициент потери IP-пакетов (IPLR).
При необходимости могут измеряться любые дополнительные параметры, предусмотренные ПМИ.
Для отправки команд управления между сервером и роботом могут быть использованы различные сетевые протоколы транспортного уровня, такие как UDP, TCP или QUIC. Выбор конкретного протокола зависит от условий работы и конкретной реализации ПО управления.
Описание процедуры тестирования (на примере протокола UDP) включает в себя:
- сервер генерирует датаграммы UDP, в которые инкапсулированы команды управления, после чего отправляет их клиенту;
- клиент, подключенный к роботу-манипулятору, принимает входящие дейтаграммы;
- каждая команда индексируется уникальным порядковым номером, что обеспечивает контроль отправленных и полученных команд.
При передаче команд роботу через сеть необходимо, чтобы он выполнял их с заданной скоростью, без задержек, в заданном порядке и без потерь, что контролируется оператором визуально и с помощью ПО.
Типовой сценарий тестирования (на примере протокола UDP) выглядит следующим образом:
- передаваемая команда инкапсулируется в качестве полезной нагрузки в UDP-датаграмму;
- команда составляется в формате JSON (например, dictCmd = {"number": 1, "X": 187.02, "Y": 10.32, "Z": 10}).
Каждая команда последовательно передается с интервалом 100 мс.
При одинаковых условиях тестирование проводят три раза, длительностью не менее 5 мин.
В результате каждого тестирования определяются значения исследуемых параметров.
Оператор непосредственно или с помощью камеры контролирует выполнение роботом-манипулятором команд. Результаты вносят в протокол проведения измерений.
Пример тестирования на основе DWDM-системы представлен в приложении I. Примеры проводимых тестов представлены в приложении ДА.
(справочное)
На рисунке I.1 представлена структурная схема модельной сети для тестирования дистанционно-управляемого робота, где в качестве ядра сети используется DWDM-система, а в качестве УПП используется переменный оптический аттенюатор.
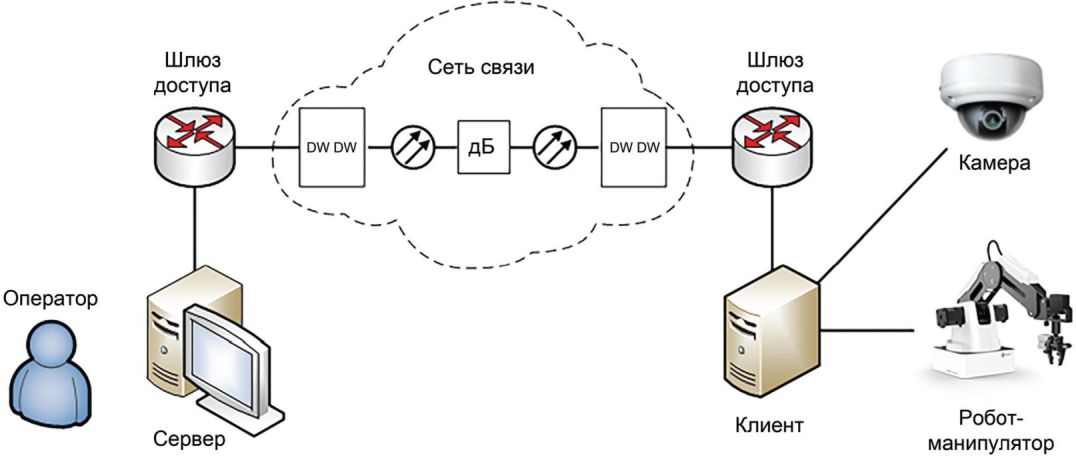
DWDM-системы
С помощью аттенюатора в данной модельной сети появляется возможность изменять затухание оптического сигнала в широких пределах до состояния "потеря сигнала". Это в свою очередь позволяет изменять вероятность возникновения ошибок при передаче. Изменение вероятности ошибки позволяет варьировать задержку доставки пакетов данных, содержащих команды управления.
(справочное)
ДА.1 Тест передачи движения
Предварительные условия: Модельная сеть развернута и готова к тестированию. Затуханий, задержек, потерь и дупликации пакетов и т.д. в канал передачи данных не вносится.
Основной процесс: Оператор отправляет команду с сервера на клиента с подключенным роботом.
Ожидаемый результат: робот выполняет полученную команду.
ДА.2 Тест обратной связи
Предварительные условия: для дистанционного мониторинга выполнения команд в состав модельной сети включено дополнительное устройство с передачей видеоизображения (камера).
Основной процесс: оператор отправляет команду с сервера на клиента с подключенным роботом.
Результат: робот получает команду, после чего подтверждается ее получение. Далее робот выполняет полученную команду, после чего на сервер отправляется подтверждение выполнения. Результат выполнения команды контролируется оператором с помощью камеры.
ДА.3 Тест реакции на помехи
Предварительные условия: модельная сеть развернута и готова к тестированию. В поток передаваемых данных с помощью УПП вносится затухание сигнала, задержки, джиттер, потери и дупликация пакетов данных и т.д. согласно ПМИ.
Основной процесс: оператор отправляет команду управления с сервера на клиента с подключенным роботом.
Результат: робот выполняет полученную команду. Результат выполнения команды контролируется оператором непосредственно или с помощью камеры. Замеченные артефакты (отказы, ошибки, неточность движений и т.д.) в работе робота вносятся в протокол проведения тестирования.
(справочное)
ПРИМЕНЕННОГО В НЕМ ПРОЕКТА МЕЖДУНАРОДНОГО СТАНДАРТА
Таблица ДБ.1
Структура настоящего стандарта | Структура проекта международного стандарта ITU-T Q.TSN |
1 Область применения | 1 Область применения |
2 Нормативные ссылки | 2 Нормативные ссылки |
3 Термины и определения | 3 Термины и определения 3.1 Термины, определенные в других источниках 3.2 Термины, определенные в настоящем проекте стандарта |
4 Сокращения | 4 Сокращения |
5 Соглашения | |
6 Обзор | |
5 Структура модельной сети (раздел 7) | 7 Модельная сеть для научных исследований и образования в области робототехники с дистанционным управлением |
6 Исследуемые параметры (раздел 9) | 9 Параметры сети для тестирования |
7 Описание процедуры тестирования (раздел 8) | 8 Процедура тестирования и сценарии |
8 Сценарии тестирования (раздел 8) | |
Приложение I Пример тестирования на основе DWDM-системы | Приложение I Примеры использования |
Приложение II Актуальность данной рекомендации и GAP-анализ | |
Приложение ДА Примеры тестов | Библиография |
Приложение ДБ Сопоставление структуры настоящего стандарта со структурой примененного в нем проекта международного стандарта | |
<*> Данный раздел исключен, т.к. его содержание в проекте международного стандарта ITU-T Q.TSN в настоящий момент не определено и находится в стадии разработки. <**> Данный раздел исключен, т.к. содержание данного раздела в значительной мере отражено во введении. <***> Данный раздел исключен, т.к. в нем проводится обзор связанных с проектом международного стандарта ITU-T Q.TSN стандартов, проектов стандартов и прочих документов. Примечание - После заголовков разделов (подразделов) настоящего стандарта приведены в скобках номера аналогичных им разделов (подразделов) проекта международного стандарта. | |
ITU-T Y.1541 | Network performance objectives for IP-based services |
УДК 004.057.4:006.354 | ОКС 35.020 |
Ключевые слова: информационные технологии, передача данных, роботы, тестирование | |