СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ вводится в действие с 01.01.2026.
Название документа
"ГОСТ Р 72225-2025. Национальный стандарт Российской Федерации. Фототопография. Сканирование лазерное наземное. Технические требования"
(утв. и введен в действие Приказом Росстандарта от 05.08.2025 N 840-ст)
"ГОСТ Р 72225-2025. Национальный стандарт Российской Федерации. Фототопография. Сканирование лазерное наземное. Технические требования"
(утв. и введен в действие Приказом Росстандарта от 05.08.2025 N 840-ст)
Содержание
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 5 августа 2025 г. N 840-ст
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФОТОТОПОГРАФИЯ
СКАНИРОВАНИЕ ЛАЗЕРНОЕ НАЗЕМНОЕ
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
Phototopography. Terrestrial laser scanning.
Technical requirements
ГОСТ Р 72225-2025
ОКС 07.040
Дата введения
1 января 2026 года
1 РАЗРАБОТАН Публично-правовой компанией "Роскадастр" (ППК "Роскадастр")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 404 "Геодезия и картография"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 5 августа 2025 г. N 840-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Наземное лазерное сканирование является важным источником информации о местности и объектах при получении пространственных данных для решения проектных, инженерных и кадастровых задач, создании цифровых топографических и инженерно-топографических планов.
Технические характеристики материалов наземного лазерного сканирования определяют качество конечной пространственной информации в виде цифровых моделей местности и объектов, единой электронной картографической основы, а также новых видов продукции, таких как 3D-модели объектов и технологий информационного моделирования (ТИМ/BIM) в строительстве. Настоящий стандарт разработан в целях получения конечной продукции с требуемыми характеристиками на основе использования технологий наземного лазерного сканирования.
Содержанием стандарта являются технические требования к процессам наземного лазерного сканирования, используемому съемочному оборудованию и программным средствам получения и обработки материалов наземного лазерного сканирования.
Область применения настоящего стандарта связана с предметной областью ГОСТ Р 8.794, ГОСТ Р 56905, ГОСТ Р 59562, ГОСТ Р 70689, ГОСТ Р 70690, ГОСТ Р 71863.
В процессе разработки стандарта использованы положения Федеральных законов [1] - [3] и нормативных правовых документов, устанавливающих требования к выполнению геодезических, топографических, фотограмметрических, картографических и кадастровых работ [4] - [7].
Настоящий стандарт распространяется на комплекс работ по наземному лазерному сканированию с применением мобильных, переносных, стационарных сканирующих систем в целях топографических и инженерных съемок, выполнения кадастровых работ.
Настоящий стандарт предназначен для применения субъектами геодезической и картографической деятельности, а также субъектами градостроительной и кадастровой деятельности при организации и выполнении работ по наземному лазерному сканированию с целью создания топографических и инженерно-топографических планов, трехмерных моделей местности и объектов, карт (планов) объектов землеустройства, межевых и технических планов.
Стандарт устанавливает требования к содержанию выполнения технологических процессов, их основным параметрам, способам выполнения, а также требования к аппаратно-программным средствам, промежуточным и конечным результатам работ.
В настоящем стандарте использованы нормативные ссылки на следующие документы:
ГОСТ 32453-2017 Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек
ГОСТ Р 8.794 Государственная система обеспечения единства измерений. Сканеры лазерные наземные. Методика поверки
ГОСТ Р 51833 Фотограмметрия. Термины и определения
ГОСТ Р 52369 Фототопография. Термины и определения
ГОСТ Р 52928 Система спутниковая навигационная глобальная. Термины и определения
ГОСТ Р 56905 Проведение обмерных и инженерно-геодезических работ на объектах культурного наследия. Общие требования
ГОСТ Р 57258 Системы беспилотные авиационные. Термины и определения
ГОСТ Р 59562-2021 Съемка аэрофототопографическая. Технические требования
ГОСТ Р 70689-2023 Дороги автомобильные общего пользования. Лазерное сканирование. Общие требования к проведению работ
ГОСТ Р 70690 Дороги автомобильные общего пользования. Лазерное сканирование. Требования к данным лазерного сканирования на различных этапах жизненного цикла автомобильной дороги
ГОСТ Р 71863-2024 Фототопография. Лазерное сканирование. Общие положения
СП 47.13330.2016 "СНиП 11-02-96 Инженерные изыскания для строительства. Основные положения"
СП 126.13330.2017 "СНиП 3.01.03-84 Геодезические работы в строительстве"
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов (сводов правил) в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный документ, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого документа с учетом всех внесенных в данную версию изменений. Если заменен ссылочный документ, на который дана датированная ссылка, то рекомендуется использовать версию этого документа с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный документ, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку. Сведения о действии сводов правил целесообразно проверить в Федеральном информационном фонде стандартов.
В настоящем стандарте применены термины по ГОСТ Р 51833, ГОСТ Р 52369, ГОСТ Р 52928, ГОСТ Р 57258, а также следующие термины с соответствующими определениями:
3.1 внешнее ориентирование облака точек лазерных отражений: Преобразование координат облака точек лазерных отражений из внутренней системы координат лидара в требуемую систему координат по опорным маркам и/или с использованием систем навигации.
3.2 внутреннее ориентирование облака точек лазерных отражений: Соединение отдельных облаков точек лазерных отражений в единое облако по общим характерным точкам, которые однозначно идентифицируются по сканам, полученным со смежных станций сканирования.
3.3
инерциальное измерительное устройство: Жестко связанное с лазерным сканером (лидаром) устройство, основанное на сочетании акселерометров и гироскопов, предназначенное для определения углов ориентации лидара во время выполнения лазерного сканирования. [Адаптировано из ГОСТ Р 59328-2021, пункт 3.1.8] |
3.4
классификация точек лазерных отражений: Отнесение точек лазерных отражений к определенной классификационной группе по характерным признакам элементов местности и объектов. [ГОСТ Р 71863-2024, пункт 3.9] |
3.5 контрольная марка: Расположенный на объекте опознак с известными пространственными координатами, предназначенный для контроля точности облака точек лазерных отражений.
3.6
лидар: Устройство, сочетающее в себе модуль формирования развертки и дальномер, метод работы которого основан на измерении расстояний путем излучения лазерного луча и замера времени возвращения отраженного луча, с учетом формы направленного сигнала. [ГОСТ Р 70689-2023, пункт 3.6] |
3.7 мертвая зона: Участок местности или объекта лазерного сканирования, для которого отсутствуют точки лазерных отражений вследствие экранирования другими объектами.
3.8 мобильная система лазерного сканирования: Система, устанавливаемая на мобильном наземном носителе, предназначенная для выполнения лазерного сканирования местности и объектов.
3.9
облако точек лазерных отражений: Совокупность фиксируемых лазерным сканером точек земной поверхности и объектов, характеризуемых пространственными координатами и интенсивностью отражения. [ГОСТ Р 70174-2022, пункт 3.1.3] |
3.10 опорная марка: Расположенный на объекте опознак с известными пространственными координатами, предназначенный для внутреннего и внешнего ориентирования облака точек лазерных отражений.
3.11 переносная система лазерного сканирования: Носимая или перемещаемая оператором система, предназначенная для выполнения наземного лазерного сканирования местности и объектов.
3.12
плотность облака точек лазерных отражений: Количество точек лазерных отражений поверхности объекта на единицу площади. [ГОСТ Р 70690-2023, пункт 3.5] |
3.13 разрежение облака точек лазерных отражений: Сокращение числа точек лазерных отражений, приходящихся на единицу площади.
3.14 скан: Облако точек лазерных отражений, полученное с одной станции сканирования и/или с одного маршрута сканирования.
3.15 сканерный ход: Геометрические построения для объединения перекрывающихся облаков точек лазерных отражений, получаемых со станций сканирования, последовательно располагаемых вдоль маршрута перемещения сканера.
3.16 спутниковая геодезическая аппаратура: Геодезическая навигационная аппаратура потребителя, позволяющая производить кодовые и фазовые измерения псевдодальности по сигналам глобальной навигационной спутниковой системы и фиксировать результаты измерений в цифровом виде.
3.17 стационарная система лазерного сканирования: Фиксируемая на неподвижном основании система, предназначенная для выполнения наземного лазерного сканирования местности и объектов.
3.18
сырые данные: Непосредственно полученные (необработанные) данные результатов наблюдений или измерений. [ГОСТ Р 59328-2021, пункт 3.1.23] |
3.19 точка лазерного отражения: Центр отражения лазерного пучка, посылаемого и принимаемого лазерным сканером от поверхности земли или объекта, характеризующийся пространственным положением и другими характеристиками.
Примечание - Может включать порядок отражения, угловое направление лазерного пучка, время регистрации, при использовании цифровой фотокамеры - цвет (RGB).
3.20 характерная точка: Группа точек лазерных отражений, однозначно идентифицирующая объект или его часть, предназначенная для внутреннего ориентирования облака точек лазерных отражений.
3.21 SLAM: Метод картографирования без использования глобальной навигационной спутниковой системы, используемый в наземных системах лазерного сканирования для формирования облака точек лазерных отражений на основе инерциальной навигационной системы и характерных контурных точек снимаемых объектов.
В настоящем стандарте применены следующие сокращения:
БС - базовая станция;
ГГС - государственная геодезическая система;
ГНСС - глобальная навигационная спутниковая система;
ГСК-2011 - государственная геодезическая система координат 2011 года для использования при осуществлении геодезических и картографических работ;
ИИУ - инерциальное измерительное устройство;
ЛС - лазерный сканер/лазерное сканирование;
МЛС - мобильная лазерная система;
НЛС - наземное лазерное сканирование;
ПЛС - переносное лазерное сканирование;
ПО - программное обеспечение;
СГС - съемочная геодезическая сеть;
СКО - среднеквадратическое отклонение;
СКП - среднеквадратическая погрешность;
СЛС - система стационарного лазерного сканирования;
ТЗ - техническое задание;
ТИМ - технология информационного моделирования;
ТЛО - точка лазерного отражения;
ФСГС - федеральная сеть геодезических станций;
ЦММ - цифровая модель местности;
ЦМО - цифровая модель объекта;
ЦМР - цифровая модель рельефа;
ЦТП - цифровой топографический план;
BIM - информационная модель строительного объекта (Building Information Model);
ITRF - международная земная (геодезическая) отсчетная основа - реализация системы координат ITRS сетью опорных пунктов на Земле (International Terrestrial Reference Frame);
LAS - открытый двоичный формат, определенный Американским обществом фотограмметрии и дистанционного зондирования (ASPRS) для обмена и архивирования данных облака точек лидара;
PDOP - геометрический фактор точности определения местоположения, выражаемый коэффициентом потери точности;
RGB - обозначение цветного цифрового изображения, представленного аддитивной цветовой моделью (Red, Green, Blue);
RTK - метод относительного кинематического позиционирования в реальном времени (Real Time Kinematic);
SBET - формат сглаженной наилучшей оценки траектории для описания траектории движения носителя (Smoothed Best Estimate of Trajectory);
SLAM - одновременная локализация в пространстве и картографирования этого пространства (Simultaneous Location And Mapping).
5.1 Наземное лазерное сканирование выполняется с использованием подвижных (мобильных и переносных) и стационарных сканирующих систем.
Система МЛС может быть реализована на базе автомобиля, водного судна, железнодорожной платформы или другого моторизованного носителя, обеспечивающих сканирование в движении.
Система ПЛС может быть реализована на базе тележки, рюкзака, сумки или ручного портативного устройства со сканером, перемещаемых в процессе сканирования оператором.
Система стационарного лазерного сканирования устанавливается на штатив, занимающий неизменное положение в процессе сканирования.
Состав системы НЛС в общем случае должен соответствовать ГОСТ Р 71863-2024 (подраздел 5.1).
5.2 Мобильное лазерное сканирование
5.2.1 Системы МЛС предназначены для создания топографических и инженерно-топографических планов, цифровых моделей местности и объектов, определения координат объектов недвижимости.
5.2.2 Аппаратура, входящая в состав системы МЛС, должна соответствовать следующим минимальным рекомендуемым параметрам:
а) для лидара:
- максимальная дальность измерений не менее 100 м;
- частота импульсов не менее 300 кГц;
- частота сканирования не менее 100 Гц;
- пределы допускаемой абсолютной погрешности определения координат ТЛО в заданной системе координат не более 50 мм;
б) для спутниковой геодезической аппаратуры:
- использование мультисистемных многочастотных ГНСС-приемников;
- использование кодовых и фазовых измерений псевдодальности;
- частота измерений (дискретность записи данных) не менее 5 Гц;
в) для инерциального измерительного устройства инструментальные погрешности определения углов ориентации составляют:
1) при использовании сигналов ГНСС:
- по крену и тангажу не более 0,015°;
- по курсу не более 0,02°;
2) без использования сигналов ГНСС (при продолжительности разрыва в приеме сигналов, не превышающей 1 мин):
- по крену и тангажу не более 0,02°;
- по курсу не более 0,02°.
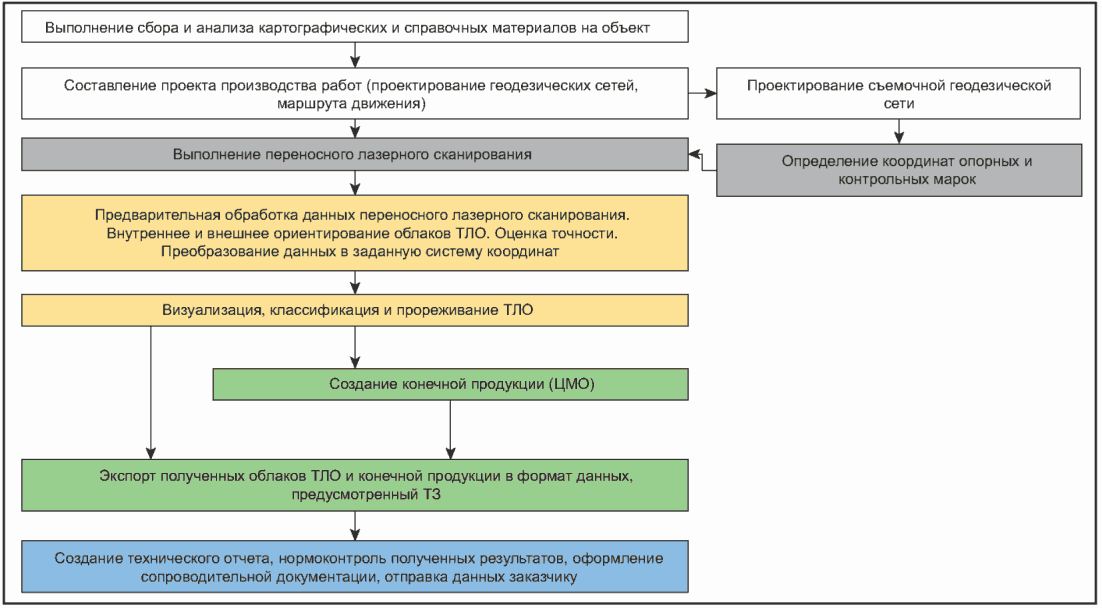
5.2.3 Общая технологическая схема выполнения работ с системами МЛС представлена на рисунке А.1 приложения А.
5.3 Переносное лазерное сканирование
5.3.1 Системы ПЛС с позиционированием по сигналам ИИУ/ГНСС рекомендуются для создания цифровых топографических и инженерно-топографических планов, цифровых моделей местности на площадных и линейных ограниченных по размерам объектах.
5.3.2 Системы ПЛС с позиционированием на основе ИИУ и технологии SLAM рекомендуются для выполнения инженерно-геодезических работ с целью создания цифровых моделей объектов, обмерных чертежей и технических планов внутренних помещений, подземных сооружений (туннелей, шахт, подземных переходов), топографической съемки дворовых территорий, съемки для целей кадастра в городских условиях, где проезд системы МЛС затруднен или невозможен.
5.3.3 Аппаратура, входящая в состав системы ПЛС, для решения перечисленных в 5.3.2 задач должна соответствовать следующим минимальным параметрам:
- дальность измерений не менее 100 м;
- частота импульсов не менее 300 кГц;
- частота сканирования не менее 20 Гц;
- инструментальная погрешность определения пространственных координат ТЛО не более 0,1 м;
- угол поля зрения по горизонтали и вертикали не менее 360° и 30° соответственно.
5.3.4 Общая технологическая схема выполнения работ с системой ПЛС представлена на рисунке А.2 приложения А.
5.4 Стационарное лазерное сканирование
5.4.1 СЛС рекомендуется применять в качестве вспомогательного с другими методами и как основной метод при решении инженерно-геодезических задач.
Полный перечень направлений применения стационарных систем СЛС представлен в ГОСТ Р 71863.
5.4.2 Система стационарного лазерного сканирования должна соответствовать следующим параметрам:
- дальность измерений не менее 100 м;
- частота импульсов не менее 300 кГц;
- инструментальная погрешность определения пространственных координат ТЛО не более 15 мм на удалении до 150 м;
- угол поля зрения по горизонтали и вертикали не менее 360° и 300° соответственно (для сканеров с ограниченным вертикальным углом поля зрения может использоваться наклоняемая платформа).
5.4.3 Интервал между ТЛО, лежащими на одной линии сканирования зависит от установок данного параметра в управляющем программном обеспечении конкретной модели сканера.
Пример - С учетом требуемой детализации (см. 9.1.2) интервал между ТЛО на расстоянии 10 м от сканера, в зависимости от установок сканирования, может находиться в диапазоне от 50 до 0,8 мм.
5.4.4 Общая технологическая схема выполнения работ с системой СЛС представлена на рисунке А.3 приложения А.
6.1 Требования к техническому заданию
Техническое задание должно включать следующие обязательные разделы:
- сведения об объекте работ и его краткая характеристика;
- цель выполнения работ;
- требования к выполнению работ;
- требования к результатам работ;
- требования к оборудованию;
- особые требования.
6.1.1 Сведения об объекте должны содержать наименование объекта, его местоположение (адрес), данные о границах объекта (картограмма участка работ, чертежи помещений), краткую характеристику объекта.
6.1.2 Целью выполнения работ по наземному лазерному сканированию может являться создание топографических планов, инженерных топографических планов, обмерных чертежей, технических планов, цифровых моделей объектов, цифровых моделей местности или другой продукции.
6.1.3 Требования к выполнению работ должны включать в себя:
- программу выполнения работ;
- сроки проведения работ;
- объекты, подлежащие сканированию;
- требования к размещению базовых станций, опорных и контрольных точек, способам и точности определения их координат;
- требования к погодным условиям.
При необходимости указывают требования к данным, полученным дополнительными измерительными средствами (фото-, видео- или другие материалы).
6.1.4 Требования к результатам работ должны содержать:
- состав передаваемых материалов;
- плотность обработанного облака ТЛО;
- результаты оценки точности ТЛО по материалам уравнивания;
- информацию о системе координат и высот;
- формат представления цифровой информации;
- требования к составу и оформлению отчетной документации.
6.1.5 В разделе требования к оборудованию указывают либо конкретные приборы и устройства, с применением которых необходимо выполнять сканирование объектов, либо рекомендуемые их технические характеристики.
6.1.6 В особых требованиях указывают дополнительные требования, обязательные к соблюдению исполнителем при выполнении работ, например по использованию материалов прошлых лет, по передаче материалов в федеральный фонд пространственных данных, требования к обеспечению безопасности на объекте, перечень обязательных к исполнению нормативных документов.
6.2 Требования к техническому проекту производства работ
6.2.1 Технический проект должен содержать следующие разделы:
- общие сведения;
- работы по геодезическому обеспечению;
- выполнение лазерного сканирования;
- первичная обработка материалов лазерного сканирования;
- камеральная обработка материалов лазерного сканирования;
- контроль и приемка работ;
- перечень материалов, подлежащих сдаче по окончании работ.
6.2.1.1 В разделе "Общие сведения" должны быть указаны: цель и назначение работ, сведения об объекте съемки (его границы, площадь или протяженность), состав создаваемой продукции с ее краткой характеристикой, сроки выполнения работ, сведения об имеющихся материалах и топографо-геодезической изученности на объект, сведения о системах координат и высот, применяемых на объекте.
6.2.1.2 В разделе "Работы по геодезическому обеспечению" должны быть представлены сведения о проектируемых способах определения координат пунктов съемочной геодезической сети и контроля их пространственного положения во время проведения работ по мобильному лазерному сканированию, сведения об определении координат опорных и контрольных марок. Должна быть представлена информация о ГНСС-аппаратуре и методах спутниковых наблюдений на пунктах государственной геодезической сети и на базовых станциях либо об используемых классических методах создания опорной и съемочной сети, а также методах обработки спутниковых и геодезических измерений. Для мобильного лазерного сканирования должны быть представлены требования к схеме размещения базовых станций.
6.2.1.3 В разделе "Выполнение лазерного сканирования" приводят проектные сведения по выполнению съемки, в том числе:
- исходные требования к наземному лазерному сканированию и его параметрам, указанным в ТЗ (средняя плотность ТЛО, СКП определения пространственных координат ТЛО, скорость движения МЛС и ПЛС, расположение станций СЛС);
- тип используемого лазерного сканера (стационарный, переносной, мобильный) и его модель;
- характеристики используемого сканера: измеряемая дальность, диапазон измерений по горизонтали и вертикали, частота лазерных импульсов и частота сканирования, допустимая инструментальная линейная и угловая погрешность;
- характеристики навигационного модуля для мобильных и переносных систем, в том числе тип ИИУ и его угловая погрешность, тип приемника ГНСС;
- тип и характеристики используемых цифровых камер;
- основные характеристики программного обеспечения управления сканированием и сбора данных;
- для МЛС должны быть указаны: количество проездов мобильной сканирующей системы, перекрытие маршрутов в процентном отношении, места разворотов, начало и окончание маршрутов, места инициализации сканирующей системы перед началом сканирования и после его завершения, необходимость проведения и места калибровочных проездов, при необходимости указывается число и места установки опорных и контрольных точек;
- для ПЛС должна быть спроектирована схема перемещения сканера по объекту съемки, места установки опорных марок, способ инициализации системы;
- для СЛС должна быть спроектирована схема установок сканера и места расположения связующих марок, а также схема размещения опорных и контрольных марок, координаты которых должны быть получены с использованием ГНСС-аппаратуры или тахеометра в единой системе координат.
6.2.1.4 В разделе "Первичная обработка материалов лазерного сканирования" должны быть указаны операции:
- уравнивание траекторий движения (для мобильного и переносного ЛС);
- конвертирование исходных данных (ТЛО) в LAS-файлы;
- обработка (внешнее ориентирование в заданной системе координат, цветокоррекция) цифровых фотоснимков (для мобильного ЛС);
- оценка точности уравненных траекторий движения сканера и облаков точек (для мобильного и переносного ЛС).
Для первичной обработки материалов СЛС должны быть указаны операции:
- внутреннее и внешнее ориентирование облаков ТЛО;
- фильтрация облаков ТЛО (удаление шумов);
- уравнивание облаков ТЛО и оценка точности.
6.2.1.5 В разделе "Камеральная обработка материалов лазерного сканирования" для всех видов НЛС перечисляют все проектируемые технологические процессы:
- проверка качества полевых материалов;
- внешнее ориентирование ТЛО (при отсутствии данного процесса на этапе предварительной обработки данных);
- прореживание ТЛО;
- классификация ТЛО в соответствии с ТЗ;
- экспорт в требуемый формат данных;
- передача данных сканирования в камеральное производство для создания конечной продукции.
6.2.1.6 В разделе "Контроль и приемка работ" приводятся процессы, операции и методы измерений, при помощи которых осуществляется проверка полученной в ходе камеральной обработки продукции.
6.2.1.7 В разделе "Перечень материалов, подлежащих сдаче по окончании работ" должны быть указаны все материалы и данные (с детализацией их состава, объема, форматов), передаваемые в камеральное производство и заказчику.
6.2.2 Технические требования к проектированию наземного лазерного сканирования
6.2.2.1 При проектировании наземного лазерного сканирования с целью топографической съемки плотность и точность определения координат и высот ТЛО с учетом масштаба плана и высоты сечения рельефа должна проектироваться в соответствии с [6], ГОСТ Р 59562-2021 (приложения В, Г), СП 47.13330.2016 (пункты 5.1.17 и 5.1.19).
6.2.2.2 Проектирование лазерного сканирования для определения координат объектов недвижимости, в том числе внутренних помещений должно выполняться с учетом требований [7]. Плотность и точность определения координат и высот ТЛО для создания цифровых моделей объектов должна быть определена в технических требованиях.
6.2.2.3 При проектировании мобильного лазерного сканирования в целях кадастра и инженерных изысканий необходимо соблюдение следующих требований:
- ширина полосы сканирования определяется техническими требованиями;
- количество проездов сканирующей системы вдоль проезжих частей автомобильных дорог должно определяться количеством полос в каждой проезжей части, при этом сканирование должно быть выполнено в обоих направлениях. Для каждых двух полос проезжей части необходимо выполнить по крайней мере один проезд сканирующей системы. При наличии трех полос необходимо выполнить не менее двух проездов;
- область перекрытия между смежными сканами должна составлять не менее 30% в случае, когда проезды выполняют по одной проезжей части либо по проезжим частям, находящимся на одном уровне [в соответствии с ГОСТ Р 70689-2023 (подпункт 9.2.3.8)];
- при съемке застроенных территорий в целях кадастра плотность точек лазерных отражений на объектах, попадающих в запроектированную полосу съемки должна быть не менее 400 т/м2;
- при расположении проезжей части на насыпи необходимо проектировать проезды сканирующей системы вдоль правой и левой обочины проезжей части для исключения мертвых зон лазерного сканирования на склоне насыпи;
- время проезда сканирующей системы по заданному маршруту должно быть спроектировано с учетом дорожного трафика.
В местах ограниченного приема ГНСС-сигналов (тоннели, многоярусные развязки) проектируются опорные точки с учетом характеристик используемого ИИУ и длительности отсутствия ГНСС-сигналов.
6.2.2.4 Частота сканирования, частота излучения и скорость движения мобильного сканера проектируются таким образом, чтобы обеспечить требуемую плотность ТЛО, указанную в ТЗ.
Пример - Для обеспечения плотности ТЛО 100 т/м2 на расстоянии 50 м от траектории проезда МЛС требуется установить частоту излучения 1,1 мГц, при этом скорость проезда должна быть не более 60 км/ч.
6.2.2.5 Программное обеспечение первичной обработки результатов мобильного лазерного сканирования, поставляемое в комплекте с прибором, должно удовлетворять следующим требованиям:
- обеспечивать проверку целостности и корректности записи данных сканирования;
- выполнять уравнивание траекторий движения мобильного сканера;
- выполнять генерацию облаков точек;
- выполнять уравнивание облаков точек;
- выполнять наложение истинного цвета на облака точек;
- выполнять определение углов выставки цифровой фотокамеры (фотокамер), если они сопровождают процесс лазерного сканирования;
- выполнять цветокоррекцию фотоснимков;
- обеспечивать оценку точности уравненных данных с генерацией текстовых отчетов.
6.2.2.6 Программное обеспечение камеральной обработки результатов мобильного лазерного сканирования должно удовлетворять следующим требованиям:
- выполнять классификацию облаков точек;
- выполнять построение ЦМР для создания топографических и инженерно-топографических планов;
- обеспечивать создание векторных моделей (местности и/или объектов);
- выполнять оценку точности ЦМР и векторных моделей.
6.2.2.7 При проектировании переносного лазерного сканирования на основе технологии SLAM для целей кадастра и создания инженерно-топографических планов необходимо соблюдение следующих требований:
- с целью контроля точности маршруты должны замыкаться на свою начальную точку или опираться на пункты геодезической сети, координаты которой известны с требуемой точностью;
- протяженность маршрута не должна превышать 2 км или 30 мин непрерывной съемки для обеспечения корректности вычисления траектории движения;
- следует избегать самопересечения траектории движения и движения вперед - назад, многократного сканирования одних и тех же объектов в ходе одной сессии сканирования;
- значительные по площади объекты рекомендуется подразделять на отдельные участки.
Для сканирующих систем, использующих одновременно ГНСС/ИИУ, требования проектирования переносного лазерного сканирования аналогичны требованиям по проектированию мобильного лазерного сканирования (см. 6.2.2.3).
6.2.2.8 При проектировании стационарного лазерного сканирования необходимо соблюдение следующих требований:
- размещение станций сканирования должно проектироваться в зависимости от геометрии объекта и его характеристик с обеспечением не менее 30% перекрытия сканов;
- расстояние между станциями проектируют таким образом, чтобы обеспечить равномерное покрытие поверхностей точками лазерных отражений и минимум мертвых зон;
- открытые для обзора помещения с простой геометрией могут быть отсканированы с одной станции сканирования, узкие коридоры, внутрицеховые помещения требуют проложения сканерных ходов;
- при съемке фасадов зданий сканер рекомендуется устанавливать на расстоянии, при котором будет обеспечено сканирование всей высоты здания;
- опорные точки необходимо размещать в пределах всего поля зрения сканера на разной высоте и на разном удалении от него, удаление не должно превышать 50 м;
- плотность и точность определения пространственных координат ТЛО, полученных с использованием СЛС должна проектироваться с учетом 6.2.2.1, 6.2.2.2 и требований ТЗ.
6.2.2.9 При проектировании должны быть обеспечены требования безопасности для персонала, участвующего в проведении полевых работ.
7.1 Требования к съемочной геодезической сети
7.1.1 Геодезическое обеспечение работ по НЛС должно основываться на использовании пунктов государственной геодезической сети, государственной нивелирной сети, ФСГС и выполняться в соответствии с требованиями ГОСТ Р 59562-2021 (пункт 8.1.1).
7.1.2 При отсутствии в районе работ достаточного количества постоянно действующих пунктов ФСГС должна быть создана съемочная геодезическая сеть. СГС при выполнении работ по НЛС представляет собой пункты временного и постоянного закрепления, на которых располагаются базовые станции. СГС создают в соответствии с требованиями ГОСТ Р 59562-2021 (подраздел 8.2). Координаты пунктов СГС могут определяться спутниковыми или классическими геодезическими методами с точностью, указанной в техническом проекте на создание СГС.
7.1.3 Удаление базовой станции от сканирующей системы не должно быть более 30 км при погрешности определения пространственных координат объектов не более 0,1 м. Координаты базовых станций на пунктах временного закрепления должны быть получены статическим методом, при этом продолжительность ГНСС-наблюдений с учетом длин векторов и геометрии сети должна быть определена на этапе проектирования измерений.
7.1.4 Для вычисления координат и высот пунктов съемочного обоснования рекомендуется использовать параметры преобразования координат согласно ГОСТ 32453-2017 (раздел 5).
7.1.5 На БС должен обеспечиваться угол возвышения спутников более 15°.
7.1.6 Применяемая на базовых станциях спутниковая геодезическая аппаратура должна соответствовать следующим минимальным рекомендуемым параметрам:
- ГНСС-приемник должен быть мультисистемным и обеспечивать прием сигналов не менее чем на двух частотах;
- использование кодовых и фазовых измерений псевдодальности;
- частота измерений (дискретность записи данных), должна быть согласована с частотой записи данных мобильного ГНСС-приемника.
7.2 Требования к размещению опорных и контрольных марок
7.2.1 Опорные и контрольные точки (марки) должны закрепляться на местности (объекте), их координаты должны быть определены геодезическими методами в системе координат, указанной в технических требованиях.
Опорные марки используют для внешнего ориентирования ТЛО.
Контрольные марки предназначены для оценки точности определения пространственных координат ТЛО.
7.2.2 Требования к точности определения плановых координат и высот опорных и контрольных марок в зависимости от масштаба создаваемых топопланов приведены в таблице Б.1 приложения Б.
7.2.3 Расположение марок при МЛС выполняют с учетом следующих требований:
- применение опорных марок необходимо в случаях, когда выполнение сканирования проводится с требованием к погрешности пространственного положения ТЛО относительно исходных геодезических пунктов в 0,1 м и точнее, а также при съемке в условиях ограниченного приема сигнала ГНСС или при его отсутствии (съемка в тоннелях и т.п.);
- количество контрольных и опорных марок по маршруту выбирается исходя из сложности маршрута, его протяженности, количества поворотов в соответствии с ГОСТ Р 70689-2023 (подпункт 9.1.1.9);
- размещение марок плоского типа на асфальтовом покрытии следует выполнять на расстоянии не более 1 м от кромки автомобильной дороги;
- для объединения смежных сканов опорные и контрольные марки должны быть установлены в зонах поперечного перекрытия смежных маршрутов в соответствии с ГОСТ Р 70689-2023 (подпункт 9.2.3.10);
- в качестве опорных и контрольных марок могут использоваться характерные точки с известными координатами, четко различимые на облаках ТЛО.
7.2.4 Расположение марок при ПЛС выполняют с учетом следующих требований:
- опорные и контрольные марки располагаются в соответствии с рабочим проектом маршрутов ПЛС;
- для внутреннего и внешнего ориентирования сканов при выполнении съемки внутри помещений необходимо использовать опорные марки, которые должны быть установлены в местах перекрытия сканов;
- при выполнении переносного лазерного сканирования вне помещений целесообразно использовать данные навигационного модуля ГНСС/ИИУ для внешнего и внутреннего ориентирования сканов. В этом случае для контроля требуемой точности положения и ориентирования сканов рекомендуется в начале и в конце траектории сканирования установить по одной контрольной и три опорных марки и определить их координаты с помощью тахеометра или ГНСС-аппаратурой (методом RTK). Точность определения координат марок должна соответствовать требованиям СП 126.13330.2017 (пункт 4.11.4).
7.2.5 Для стационарного лазерного сканирования опорные и контрольные марки проектируются на расстоянии до 50 м от места установки сканера при работах на открытой местности.
Если внутреннее ориентирование двух сканов выполняется по характерным точкам, то необходимо, чтобы была видимость по крайней мере четырех общих характерных точек с каждой станции сканирования.
Для обеспечения процесса внешнего ориентирования единого облака ТЛО необходимо использовать на объекте не менее четырех равномерно расположенных опорных марок и не менее двух контрольных марок.
По результатам обработки и уравнивания в программе обработки геодезических измерений (данных тахеометрической съемки или ГНСС-измерений), входящей в комплект геодезического оборудования, должен быть создан текстовый файл с каталогом координат марок, который загружается в ПО постобработки данных сканирования для выполнения внешнего ориентирования сканов.
8.1 Требования к выполнению лазерного сканирования с применением мобильных систем
8.1.1 В процессе подготовительных работ при мобильном лазерном сканировании должны выполняться требования, приведенные в 8.1.1.1 - 8.1.1.6.
8.1.1.1 Создание рабочего проекта съемки в управляющем компьютере с формированием рабочих каталогов для записи данных лазерного сканирования и фотосъемки, установка параметров сканирования и параметров фотосъемки.
8.1.1.2 Сборка и монтаж системы сканирования на мобильной платформе в соответствии с руководством пользователя системы.
8.1.1.3 Перед установкой мобильной платформы на багажник автомобиля необходимо проверить надежность крепления багажника на кузове.
8.1.1.4 После монтажа системы необходимо провести ее калибровку с целью определения угловых элементов ориентирования сканера относительно ИИУ, параметров редукции ГНСС-антенны относительно сканера(ов) в соответствии с руководством пользователя.
8.1.1.5 Перед началом работ необходимо проверить заряд аккумуляторов.
8.1.1.6 Требуемый объем дисковых накопителей должен быть достаточным для выполнения планируемого сеанса сканирования.
8.1.2 На калибровочном маршруте выполняется сканирование плоских поверхностей, как правило стен зданий. По результатам съемки должен быть создан файл в управляющем ПО, состоящий из поправок в углы ориентации между ИИУ и сканера.
8.1.3 Перед началом выполнения работ с системой МЛС должен быть выполнен процесс инициализации в соответствии с рекомендациями производителя аппаратуры. Процесс инициализации в общем виде должен включать статические наблюдения в течение времени, необходимого для получения требуемого значения PDOP на участке с благоприятными условиями для приема сигнала ГНСС. Процесс инициализации ИИУ должен включать несколько резких маневров автомобиля. После выполнения процедуры инициализации системы необходимо подъехать к начальной точке маршрута сканирования.
8.1.4 Перед началом движения по рабочему маршруту необходимо инициализировать датчик измерения пути (одометр), дать команду операторам БС на включение ГНСС-приемников и начала записи данных.
8.1.5 На маршруте сканирования должны быть соблюдены следующие требования:
- проезды по маршруту необходимо выполнять как в прямом, так в обратном направлении; для автодорог с четырьмя полосами и более необходимо всегда выполнять проезды по правым рядам;
- количество проездов выбирается исходя из дорожной ситуации и должно быть определено на этапе проектирования производства работ;
- при выполнении сканирования запрещается движение задним ходом;
- рекомендуется минимизировать движение с параллельно движущимися транспортными средствами;
- при проезде в непосредственной близости от опорных и контрольных точек необходимо снижать скорость движения насколько это позволяет дорожная ситуация для фиксирования большего числа точек лазерных отражений от марок;
- для обеспечения корректного уравнивания траектории движения данные необходимо записывать в одном проекте (миссии), разделяя прямое и обратное направления.
8.1.6 После завершения сканирования на маршруте выполняется поиск места для ГНСС-наблюдений в статическом режиме и проверка собранных материалов для проведения технологического контроля, включающего следующие этапы проверки:
- полноту покрытия сканируемых объектов точками лазерных отражений и фотоснимками;
- комплектность материалов (сырые данные ЛС, траекторные данные, фотоснимки, данные одометра).
8.1.7 При выполнении процедуры завершения съемки обеспечивается сохранение данных и их передача в камеральную обработку.
8.2 Требования к выполнению лазерного сканирования с применением переносных систем
8.2.1 Подготовка к работе переносного сканера осуществляется в соответствии с техническими и эксплуатационными руководствами производителя аппаратуры с соблюдением указанных в них требований и методов подключения.
8.2.2 Перед началом выполнения работ с системой ПЛС должен быть выполнен процесс инициализации в соответствии с рекомендациями производителя аппаратуры.
8.2.3 Сканирование выполняется по запроектированному маршруту с захватом всех опорных и контрольных марок, при этом:
а) выполняется детальное сканирование марок путем замедления скорости движения возле них;
б) сканирование на маршруте выполняется в автоматическом режиме, оператор осуществляет контроль сбора данных с наблюдением статуса съемки на рабочем мониторе;
в) завершение сканирования маршрута выполняется путем:
1) завершения маршрута на начальную точку,
2) проложения маршрута между опорными точками, расположенными в начале и конце маршрута;
г) при использовании ГНСС и инерциальной системы выполняются повторные ГНСС-наблюдения в режиме статики в конце маршрута.
8.2.4 Технологический контроль передаваемых материалов по переносному лазерному сканированию аналогичен 8.1.6 для МЛС.
8.3 Требования к выполнению лазерного сканирования с применением стационарных систем
8.3.1 При подготовительных мероприятиях, осуществляемых в соответствии с руководством пользователя для стационарного сканера, должны выполняться операции по подключению дополнительного оборудования к системе СЛС: полевого контроллера, ноутбука, фотокамеры и другого оборудования.
8.3.2 Опорные и контрольные точки должны быть размещены на объекте заблаговременно в соответствии с техническим проектом и определены их пространственные координаты с использованием тахеометра или другим методом, обеспечивающим требуемую точность.
8.3.3 Для выполнения СЛС систему устанавливают на штатив или иные конструкции, позволяющие надежно зафиксировать аппаратуру.
8.3.4 На открытой местности (без сооружений и коммуникаций) сканерные станции рекомендуется размещать на расстоянии 100 - 150 м друг от друга, если дальность действия сканера составляет 200 м и более. Внутри помещений расстояние между станциями может составлять 20 - 30 м или менее, в зависимости от сложности объекта.
8.3.5 Станции сканирования не рекомендуется размещать на расстояниях менее 1 м от сканируемой плоскости.
8.3.6 При отклонении от проекта производства работ вся информация о фактических местах установки сканирующей системы и расположении опорных и контрольных марок должна корректироваться на абрисе проекта.
8.3.7 Лазерное сканирование должно выполняться с учетом следующих требований:
- при работе вне помещений и необходимости выполнения фотографирования съемка на объекте должна проводиться в светлое время суток;
- установка системы на первую точку сканирования выполняется согласно схеме размещения станций по проекту работ;
- перед началом работ в управляющем ПО необходимо создать рабочий проект и выполнить настройку сканирующей системы (режим работы, область сканирования, качество фотографирования);
- на каждой станции выполняется сначала обзорное сканирование с заданной в рабочем проекте плотностью, а затем детальное сканирование выделенных областей (при необходимости) и детальное сканирование опорных марок;
- по завершении сканирования на станции необходимо выполнить предварительный просмотр облака ТЛО, при наличии серьезных дефектов сканирование на станции повторяется, при этом положение станции может быть изменено по решению оператора системы;
- при съемке фасадов сканер рекомендуется устанавливать на расстоянии не менее 10 м от фасада с учетом высоты сканируемого здания;
- при съемке открытых карьеров рекомендуется использовать ГНСС-приемник для привязки сканов в проектную систему координат. Для этой цели необходимо использовать приемник, устанавливаемый на сканере, и приемники на базовых станциях, размещаемые в районе работ в соответствии с рабочим проектом. Кроме того, стационарный сканер должен иметь датчики наклона и электронный уровень для точного горизонтирования. Сбор ГНСС-данных приемника, установленного на сканере, рекомендуется проводить после выполнения сканирования на станции.
8.3.8 Контроль качества передаваемых материалов стационарного лазерного сканирования аналогичен 8.1.6.
9.1 Требования к материалам сканирования
9.1.1 Требования к материалам сканирования должны определяться в зависимости от вида создаваемой продукции:
- цифровые модели объектов;
- цифровые модели местности;
- цифровые топографические и инженерно-топографические планы.
9.1.2 Требования к цифровым моделям объектов должны определяться в зависимости от уровня детализации:
- низкая детализация - отображение деталей объектов размером от 0,25 м (отображаются только основные геометрические формы объектов);
- средняя детализация - отображение деталей объектов размером от 0,1 м (элементы модели близки к своим реальным формам);
- высокая детализация - отображение выступов, уступов и фигурных архитектурных деталей объектов размером от 0,05 м (высоко детализированная модель с конкретными и точными значениями формы и положения всех элементов объектов).
9.1.3 Для создания цифровых моделей объектов с разными уровнями их детализации необходимо использовать сканер с погрешностью определения пространственных координат ТЛО не менее 0,05 м на расстоянии 100 м, и должны быть выполнены следующие требования:
- для объектов с низкой детализацией плотность ТЛО не менее 800 т/м2;
- для объектов со средней детализацией плотность ТЛО не менее 3000 т/м2;
- для объектов с высокой детализацией плотность ТЛО не менее 12 000 т/м2.
9.1.4 При определении координат объектов недвижимости точность (СКП) пространственных координат ТЛО, получаемых с помощью МЛС, ПЛС и СЛС, должна обеспечивать требования приложения 1 к [7] применительно к категории земель, на которых расположен объект недвижимости (от 5,0 до 0,1 м).
9.1.5 Применительно к создаваемому техническому плану согласно пункту 5 статьи 24 [2] местоположение здания, сооружения или объекта незавершенного строительства на земельном участке по желанию заказчика кадастровых работ может быть дополнительно установлено посредством пространственного описания конструктивных элементов здания, сооружения или объекта незавершенного строительства, в том числе с учетом высоты или глубины таких конструктивных элементов. В таком случае СКП пространственных координат ТЛО, получаемых с помощью МЛС, ПЛС и СЛС, не должна превышать 0,1 м согласно [2], [7].
9.1.6 Для создания ЦТП предъявляются следующие требования к материалам наземного лазерного сканирования:
- средняя погрешность определения планового положения ТЛО относительно ближайших пунктов геодезической основы, не должна превышать 0,5 мм в масштабе плана, в соответствии с пунктом 35 [6];
- средние погрешности определения точек ТЛО по высоте должны соответствовать требованиям приложения 5 [6].
9.2 Требования к обработке материалов наземного лазерного сканирования
9.2.1 В процессе обработки материалов лазерного сканирования должны быть выполнены операции по расчету траектории (для мобильных систем), внутреннему и внешнему ориентированию, удалению шумов, прореживанию облака ТЛО и оценке точности определения пространственных координат точек лазерных отражений.
9.2.2 При большом объеме цифровой информации материалов лазерного сканирования рекомендуется выполнить сегментацию облаков точек перед началом операций по удалению шумов и прореживанию облака ТЛО.
9.2.3 Вычисление траектории движения мобильной платформы и вывод облаков ТЛО выполняется в системе координат ITRF с пересчетом в ГСК-2011 или в системы координат, указанные в технических требованиях.
По результатам расчета траектории в специализированном ПО рассчитывают ТЛО в заданном формате.
9.2.4 Оценка точности заключается в определении СКО положения ТЛО, расположенных в перекрывающихся частях смежных маршрутов. Расхождение между координатами одноименных точек не должно превышать допуск, указанный в технических требованиях. Для оценки точности допустимо использовать следующие типы объектов:
- элементы линейной дорожной разметки;
- углы зданий и сооружений.
С использованием четко различимых контуров на земле, углах зданий и дорожной разметки должны быть определены поправки в плановое и высотное положение ТЛО в интерактивном и автоматическом режимах.
После введения данных поправок необходимо выполнить повторную оценку СКО планового и высотного положений ТЛО, соответствующую техническим требованиям. При несоответствии СКО этим требованиям следует провести повторную калибровку системы.
9.2.5 Контроль планового и высотного положений ТЛО, полученных методом ПЛС, выполняется аналогично 9.2.4.
9.2.6 Контроль планового и высотного положений ТЛО, полученных с использованием СЛС, выполняют в следующей последовательности:
- выполняют внутреннее ориентирование ТЛО по связующим маркам;
- в специализированную программу предварительной обработки загружают файл, содержащий координаты опорных и контрольных точек;
- выполняют внешнее ориентирование ТЛО по опорным точкам в автоматическом режиме в системе координат, указанной в ТЗ;
- по результатам уравнивания создают отчет по расхождениям ТЛО на опорных точках;
- оценку точности вычисления координат ТЛО выполняют с использованием контрольных точек.
9.2.6.1 Количество связующих марок, используемых при внутреннем ориентировании, должно быть не менее четырех, равномерно установленных в поле зрения сканера в перекрывающихся частях соседних сканов.
9.2.6.2 Центры марок должны однозначно определяться на соседних сканах. Максимальное удаление марки от сканера определяется ее размером и указывается в руководстве по эксплуатации конкретного сканера, но оно не должно превышать 50 м.
9.2.6.3 Корректность совмещения одноименных марок на разных сканах проверяется непосредственно в полевых условиях. При наличии грубых расхождений между центрами одноименных марок на разных сканах необходимо либо поменять место установки сканера, либо изменить геометрию расположения связующих марок. В качестве связующих марок допускается использовать хорошо отождествляемые на скане характерные точки объекта.
9.2.7 Облако ТЛО в результате обработки должно быть разделено на классы. Минимальный набор классов следующий:
- земная поверхность;
- растительность;
- другие объекты.
10.1 По результатам выполненных работ по лазерному сканированию создают технический отчет, включающий следующие разделы:
- создание геодезического обоснования, опорных и контрольных точек (марок);
- выполнение лазерного сканирования;
- обработка результатов сканирования и оценка точности;
- состав передаваемых материалов;
- приложения (при необходимости).
10.2 В разделе "Создание геодезического обоснования опорных и контрольных точек (марок)" необходимо привести описание методики, используемого оборудования, схему и абрисы созданной сети, опорных и контрольных точек, описание методов определения их координат, полученную точность, каталог координат пунктов СГС с оценкой точности.
10.3 В разделе "Выполнение лазерного сканирования" необходимо привести описание методики, используемого оборудования, схему размещения станций сканирования/маршруты сканирования.
10.4 В разделе "Обработки результатов сканирования и оценка точности" необходимо привести следующие сведения:
а) при выполнении МЛС и ПЛС:
- результаты уравнивания траекторий движения с использованием ИИУ/SLAM и данных БС;
- схему траекторий движения мобильных систем, мест установки опорных и контрольных точек;
- графики по результатам оценки точности с использованием контрольных точек (при необходимости), см. приложение В;
- сведения о формате записи траекторий (например, SBET или иной) и формате экспорта данных лазерного сканирования;
б) при выполнении СЛС:
- результаты проверки качества полевых материалов;
- описание и результаты процесса внутреннего ориентирования ТЛО по связующим точкам;
- описание и результаты процесса внешнего ориентирования ТЛО по опорным точкам, оценки результатов внешнего ориентирования по контрольным точкам;
- сведения о прореживании ТЛО до плотности, указанной в техническом проекте;
- сведения о классификации ТЛО в соответствии с ТЗ;
- сведения о формате экспорта данных лазерного сканирования.
10.5 В результате обработки данных лазерного сканирования в камеральное производство передаются следующие материалы:
- файл сырых данных МЛС/ПЛС с использованием вычисленной траектории движения;
- картограмма границ объекта съемки, схемы покрытий МЛС;
- материалы геодезической основы;
- калибровочный сертификат/паспорт съемочного оборудования;
- уравненные траектории с оценкой точности для мобильных систем сканирования;
- классифицированные ТЛО в заданном формате на внешнем носителе (LAS или иной);
- фотоснимки;
- иные материалы, подтверждающие результат обработки ТЛО;
- технический отчет.
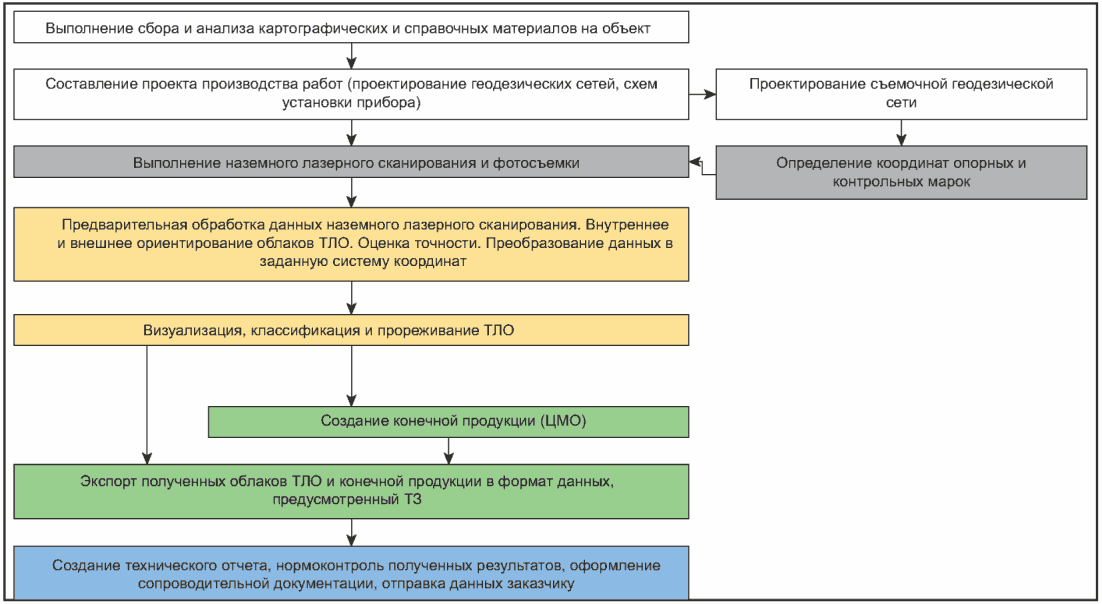
(рекомендуемое)
ТЕХНОЛОГИЧЕСКИЕ СХЕМЫ ВЫПОЛНЕНИЯ РАБОТ
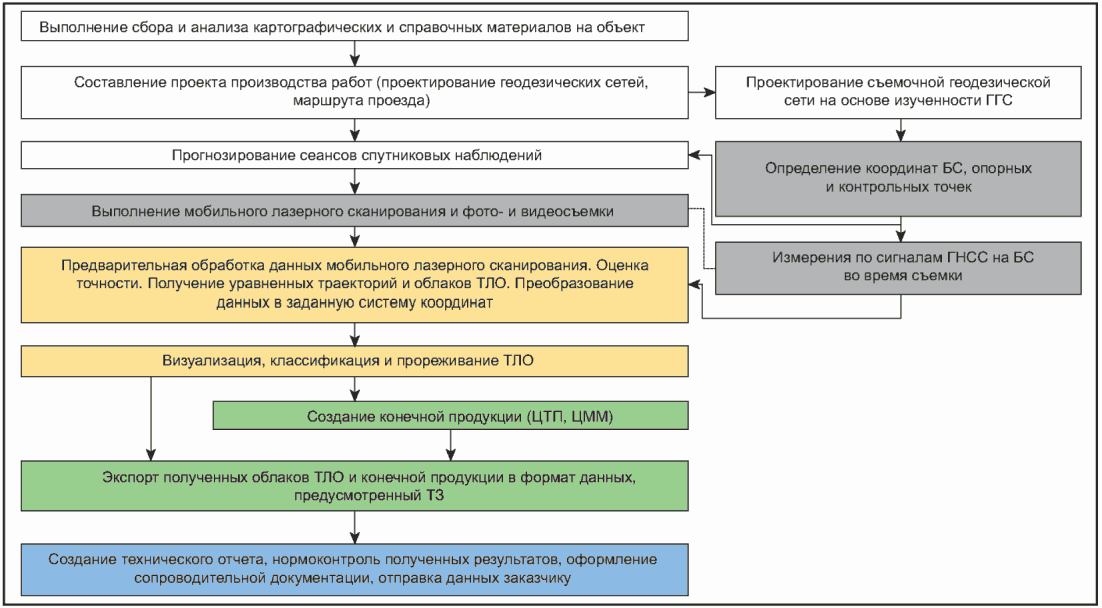
 | - подготовительные работы; |  | - камеральная обработка; |
 | - полевые работы; |  | - заключительные работы |
 | - предварительная обработка; |
мобильного лазерного сканирования
 | - подготовительные работы; |  | - камеральная обработка; |
 | - полевые работы; |  | - заключительные работы |
 | - предварительная обработка; |
переносного лазерного сканирования
 | - подготовительные работы; |  | - камеральная обработка; |
 | - полевые работы; |  | - заключительные работы |
 | - предварительная обработка; |
стационарного лазерного сканирования
(обязательное)
ТРЕБОВАНИЯ К ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПЛАНОВЫХ КООРДИНАТ
И ВЫСОТ ОПОРНЫХ И КОНТРОЛЬНЫХ МАРОК
Таблица Б.1
и высот марок относительно исходных геодезических пунктов
Масштаб плана | СКО в плане, м | Высота сечения рельефа, м | СКО по высоте, м |
1:200 | 0,05 | 0,25 | 0,03 |
1:500 | 0,08 | 0,50 | 0,06 |
1:1000 | 0,10 | 1,00 | 0,12 |
1:2000 | 0,25 | 1,00 | 0,12 |
(справочное)
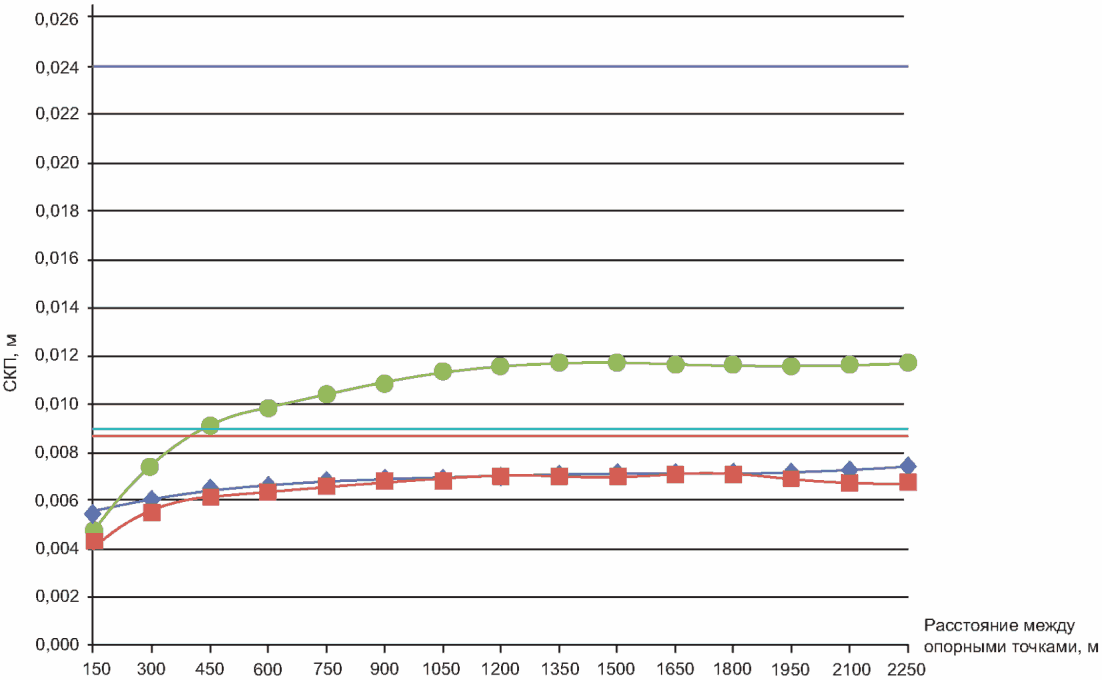
- СКП по X до уравнивания | - СКП по X | ||
- СКП по Y до уравнивания | - СКП по Y | ||
- СКП по Z до уравнивания | - СКП по Z |
Рисунок В.1 - Пример графика оценки точности
пространственных координат X, Y, Z ТЛО до
и после уравнивания
Федеральный закон от 30 декабря 2015 г. N 431-ФЗ "О геодезии, картографии и пространственных данных и о внесении изменений в отдельные законодательные акты Российской Федерации" | |
Федеральный закон от 13 июля 2015 г. N 218-ФЗ "О государственной регистрации недвижимости" | |
Федеральный закон от 26 июня 2008 г. N 102-ФЗ "Об обеспечении единства измерений" | |
Распоряжение правительства Российской Федерации от 9 февраля 2017 г. N 232-р "Об утверждении перечня находящихся в распоряжении органов государственной власти и органов местного самоуправления сведений, подлежащих представлению с использованием координат" | |
[5] | Постановление Правительства Российской Федерации от 16 ноября 2020 г. N 1847 "Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений (с изменениями и дополнениями) // Собрание законодательства РФ. - 17.07.23. - N 1155 |
Приказ Минэкономразвития России от 6 июня 2017 г. N 271 "Об утверждении требований к государственным топографическим картам и государственным топографическим планам, включая требования к составу сведений, отображаемых на них, к условным обозначениям указанных сведений, требования к точности государственных топографических карт и государственных топографических планов, к формату их представления в электронной форме, требований к содержанию топографических карт, в том числе рельефных карт" | |
Приказ Федеральной службы государственной регистрации, кадастра и картографии от 23 октября 2020 г. N П/0393 "Об утверждении требований к точности и методам определения координат характерных точек границ земельного участка, требований к точности и методам определения координат характерных точек контура здания, сооружения или объекта незавершенного строительства на земельном участке, а также требований к определению площади здания, сооружения, помещения, машино-места" |
УДК 528.71:006.354 | ОКС 07.040 |
Ключевые слова: фототопография, наземное стационарное, мобильное лазерное сканирование, облако точек лазерных отражений, цифровая модель объекта | |