СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2026
Примечание к документу
Документ вводится в действие с 01.12.2026.
Название документа
"ГОСТ ISO 13856-2-2023. Межгосударственный стандарт. Безопасность машин. Сенсорные защитные устройства. Часть 2. Общие принципы расчета и испытания сенсорных кромок и штанг"
(введен в действие Приказом Росстандарта от 18.12.2025 N 1758-ст)
"ГОСТ ISO 13856-2-2023. Межгосударственный стандарт. Безопасность машин. Сенсорные защитные устройства. Часть 2. Общие принципы расчета и испытания сенсорных кромок и штанг"
(введен в действие Приказом Росстандарта от 18.12.2025 N 1758-ст)
Содержание
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 18 декабря 2025 г. N 1758-ст
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
БЕЗОПАСНОСТЬ МАШИН. СЕНСОРНЫЕ ЗАЩИТНЫЕ УСТРОЙСТВА
ЧАСТЬ 2
ОБЩИЕ ПРИНЦИПЫ РАСЧЕТА И ИСПЫТАНИЯ СЕНСОРНЫХ КРОМОК И ШТАНГ
Safety of machinery. Pressure-sensitive protective devices.
Part 2. General principles for design and testing
of pressure-sensitive edges and pressure-sensitive bars
(ISO 13856-2-2013, IDT)
ГОСТ ISO 13856-2-2023
МКС 13.110
Дата введения
1 декабря 2026 года
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
1 ПОДГОТОВЛЕН Республиканским государственным предприятием на праве хозяйственного ведения "Казахстанский институт стандартизации и метрологии" Комитета технического регулирования и метрологии Министерства торговли и интеграции Республики Казахстан на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Комитетом технического регулирования и метрологии Министерства торговли и интеграции Республики Казахстан
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации по результатам голосования в АИС МГС (протокол от 25 сентября 2023 г. N 165-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 18 декабря 2025 г. N 1758-ст межгосударственный стандарт ГОСТ ISO 13856-2-2023 введен в действие в качестве национального стандарта Российской Федерации с 1 декабря 2026 г.
ИС МЕГАНОРМ: примечание. Текст дан в соответствии с официальным текстом документа. |
5 Настоящий стандарт идентичен международному стандарту ISO 13856-2:2013 "Безопасность машин. Сенсорные защитные устройства. Часть 2. Общие принципы расчета и испытания кромок и штанг" ("Safety of machinery - Pressure sensitive protective devices - Part 2: General principles for design и testing of pressure-sensitive edges и pressure-sensitive bars", IDT).
Международный стандарт разработан Техническим комитетом по стандартизации ISO/TC 199 "Безопасность машин" совместно с техническим комитетом CEN/TC 114 "Безопасность машин".
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
Структура стандартов по безопасности в области машиностроения выглядит следующим образом:
a) стандарты типа A (основные стандарты безопасности), содержащие основные концепции, принципы проектирования и общие аспекты, применимые ко всем машинам;
b) стандарты типа B (общие стандарты безопасности), относящиеся к одному аспекту безопасности или одному типу защиты, которые могут использоваться в широком спектре машин:
- стандарты типа B1 по конкретным аспектам безопасности (например, безопасные расстояния, температура поверхности, шум);
- стандарты типа B2 по мерам безопасности (например, двуручное управление, блокирующие устройства, сенсорные устройства, ограждения);
c) стандарты типа C (стандарты безопасности машин), касающиеся подробных требований безопасности для конкретной машины или группы машин.
Настоящий стандарт является стандартом типа B2 в соответствии с ISO 12100.
Требования настоящего стандарта могут быть дополнены или изменены стандартом типа C.
Для машин, на которые распространяется действие стандарта типа C, которые были спроектированы и изготовлены в соответствии с требованиями настоящего стандарта, требования стандарта типа C имеют приоритет.
Защитные средства для машин (см. ISO 12100:2010, 3.21) могут быть обеспечены различными способами. К таким средствам относятся ограждения, препятствующие доступу в опасную зону с помощью физического барьера (например, блокирующие ограждения в соответствии с ISO 14119 или фиксированные ограждения в соответствии с ISO 14120) и защитные устройства (например, электросенсорное защитное устройство в соответствии с IEC 61496-1 или сенсорные защитные устройства в соответствии с настоящей частью ISO 13856).
Разработчики стандартов типа C и проектировщики машин/установок рассматривают наилучший способ достижения требуемого уровня безопасности с учетом предполагаемого применения и результатов оценки рисков (см. ISO 12100).
Требуемым решением также может быть объединение нескольких из этих средств. Поставщик оборудования/установки и пользователь вместе тщательно изучают существующие опасности и ограничения, прежде чем принимать решение о выборе способа обеспечения безопасности.
Сенсорные кромки и штанги являются защитными ограждениями механического типа прибора. Общие требования для указанных защитных ограждений (а также других) приведены в ISO 12100:2010, пункты 6.3.1 и 6.3.2.
Сенсорные кромки и штанги используются в широком спектре применений с различными условиями использования, связанного, например, с экстремальными нагрузками или электрическими, физическими и химическими факторами. Они связаны с блоками управления машины, гарантирующими, что машина вернется в безопасное состояние, если срабатывает сенсорное защитное устройство.
Настоящий стандарт ограничивается конструкцией кромок и штанг, используемых при оценке риска, проводимой изготовителем машины и/или соответствующим стандартом типа C и показывающей, что это уместно, когда доступно.
Кромки и штанги могут быть прикреплены к неподвижной или подвижной части машины либо препятствию, чтобы предотвратить опасность захвата или раздавливания другой частью машины. Кромки и штанги спроектированы, отобраны, установлены и/или сопряжены с системой управления машины так, чтобы усилие/давление, прикладываемое к человеку или частям его тела, не превышало определенных пределов.
Кромки, штанги, бамперы и аналогичные устройства имеют много сходства. В таблице 1 приведены различия между двумя типами сенсорных защитных устройств, на которые распространяется настоящий стандарт, и сенсорными бамперами (рассматриваются в ISO 13856-3, где также приводится руководство по эксплуатации).
Таблица 1
Поперечное сечение | Кромка | Штанга | Бампер |
Правильно | Правильно | Правильно/неправильно | |
Соотношение длины к ширине | > 1 | Любой коэффициент | Любой коэффициент |
Эффективная сенсорная поверхность | Деформируется локально | Перемещается в целом | Деформируется локально и/или перемещается в целом |
Часть тела, предполагаемая для обнаружения | Палец | Палец | - |
Кисть | Кисть | Кисть | |
Рука | Рука | Рука | |
Нога | Нога | Нога | |
Голова | Голова | Голова | |
Грудь | Грудь | Грудь |
Настоящий стандарт устанавливает общие требования и принципы к конструированию и испытаниям сенсорных кромок и штанг, используемых в качестве защитных устройств, но не в качестве активирующих устройств для нормальной эксплуатации.
Настоящий стандарт распространяется на сенсорные кромки и штанги с внешним устройством сброса или без него, используется для распознавания людей или частей тела, которые могут подвергаться опасности, например, вызванной движущимися частями машин.
Настоящий стандарт применяется:
- к определению пригодности кромки или штанги для конкретного защитного приложения;
- выбору соответствующего уровня эффективности защиты для связанных с безопасностью частей систем управления (SRP/CS), кроме указания минимальных значений;
- определению размеров или конфигурации эффективной сенсорной зоны кромок или штанг по отношению к любому конкретному приложению;
- стопорным устройствам в соответствии с IEC 60204-1, используемым только для нормальной работы, в том числе аварийной остановки машин.
Требования к информации, которую должен предоставить изготовитель, приведены для помощи в выборе подходящей сенсорной кромки и штанги и их использовании.
Если сенсорные кромки или штанги используются в местах, доступных для пожилых людей, людей с ограниченными возможностями или детей, необходимы дополнительные требования.
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
ISO 4413, Hydraulic fluid power - General rules and safety requirements for systems and their components (Гидравлика. Общие правила и требования безопасности, касающиеся систем и их компонентов)
ISO 4414, Pneumatic fluid power - General rules and safety requirementsfor systems and their components (Пневматика. Общие правила и требования безопасности, касающиеся систем и их компонентов)
ISO 12100:2010, Safety of machinery - General principles for design - Risk assessment and risk reduction (Безопасность машин. Общие принципы конструирования. Оценка рисков и снижение рисков)
ISO 13849-1:2006, Safety of machinery - Safety-related parts of control systems - Part 1: General principles for design (Безопасность машин. Детали систем управления, связанные с обеспечением безопасности. Часть 1. Общие принципы проектирования)
ISO 13849-2, Safety of machinery - Safety-related parts of control systems - Part 2: Validation (Безопасность машин. Детали систем управления, связанные с обеспечением безопасности. Часть 2. Валидация)
IEC 60068-2-6, Environmental testing - Part 2-6: Tests - Test Fc: Vibration (sinusoidal) (Испытания на воздействие внешних факторов. Часть 2-6. Испытания. Испытание Fc: Вибрация (синусоидальная))
IEC 60068-2-14, Environmental testing - Part 2-14: Tests - Test N: Change of temperature (Испытания на воздействие внешних факторов. Часть 2-14. Испытания. Испытание N: Изменение температуры)
IEC 60068-2-27, Environmental testing - Part 2-27: Tests - Test Ea and guidance: Shock (Испытания на воздействие внешних факторов. Часть 2-27. Испытания. Испытание Ea и руководство: Удар)
IEC 60068-2-78, Environmental testing - Part 2-78: Tests - Test Cab: Damp heat, steady state (Испытание на воздействие внешних факторов. Часть 2-78. Испытания. Испытание Cab: Влажное тепло, установившийся режим)
IEC 60204-1:2005, Safety of machinery - Electrical equipment of machines - Part 1: General requirements (Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования)
IEC 60529, Degrees of protection provided by enclosures (IP code) (Степени защиты, обеспечиваемые корпусами (Код IP))
IEC 60664-1:2007, Insulation coordination for equipment within low-voltage systems - Part 1: Principles, requirements и tests (Координация изоляции для оборудования в низковольтных системах. Часть 1. Принципы, требования и испытания)
IEC 60947-5-1:2003, Low-voltage switchgear and controlgear - Part 5-1: Control circuit devices and switching elements - Electromechanical control circuit devices (Аппаратура коммутационная и механизмы управления низковольтные. Часть 5-1. Устройства и коммутационные элементы цепей управления. Электромеханические устройства цепей управления)
IEC 61000-4-2, Electromagnetic compatibility (EMC) - Part 4-2: Testing and measuring techniques - Electrostatic discharge immunity test (Электромагнитная совместимость. Часть 4-2. Методики испытаний и измерений. Испытание на невосприимчивость к электростатическому разряду)
IEC 61000-4-3, Electromagnetic compatibility (EMC) - Part 4-3: Testing and measurement techniques - Radiated, radio-frequency, electromagnetic field immunity test (Электромагнитная совместимость. Часть 4-3. Методы испытаний и измерений. Испытание на устойчивость к излучаемому радиочастотному электромагнитному полю)
IEC 61000-4-4, Electromagnetic compatibility (EMC) - Part 4-4: Testing and measurement techniques - Electrical fast transient/burst immunity test (Электромагнитная совместимость (ЭМС). Часть 4-4. Методы испытаний и измерений. Испытание на невосприимчивость к быстрым переходным процессам и всплескам)
IEC 61000-4-5, Electromagnetic compatibility (EMC) - Part 4-5: Testing and measurement techniques - Surge immunity test (Электромагнитная совместимость (ЭМС). Часть 4-5. Методы испытаний и измерений. Испытание на устойчивость к выбросу напряжения)
IEC 61000-4-6, Electromagnetic compatibility (EMC) - Part 4-6: Testing and measurement techniques - Immunity to conducted disturbances, induced by radio-frequency fields (Электромагнитная совместимость. Часть 4-6. Методы испытаний и измерений. Испытания на устойчивость к кондуктивным помехам, наведенным радиочастотными электромагнитными полями)
IEC 61000-6-2, Electromagnetic compatibility (EMC) - Part 6-2: Generic standards - Immunity for industrial environments (Электромагнитная совместимость (ЭМС). Часть 6-2. Общие стандарты. Стандарт помехоустойчивости для промышленных обстановок)
IEC 61439-1:2011, Low-voltage switchgear and controlgear assemblies - Part 1: General rules (Аппаратура коммутационная и механизмы управления низковольтные комплектные. Часть 1. Общие правила)
В настоящем стандарте применены термины по ISO 12100, ISO 13849-1, а также следующие термины с соответствующими определениями:
3.1 сенсорная кромка (pressure-sensitive edge) (далее - кромка): Защитное устройство, чувствительное к давлению, типа "механическое расцепление", состоящее из датчика (3.3) или датчиков и блока управления и одного или нескольких устройств переключения выходного сигнала (3.5), предназначенных для обнаружения контакта с человеком или частью тела человека, когда локально деформируется эффективная сенсорная поверхность (3.9), вызывая активирование датчика(ов).
Примечания
1 Датчик или датчики формируют сигнал, когда на часть их поверхности оказывается давление. Блок управления реагирует на сигнал от датчика и формирует выходной сигнал(ы) в систему управления машиной.
2 Длина датчика(ов) больше ширины. Поперечное сечение по всей сенсорной площади постоянное, а ее ширина обычно находится в пределах от 8 до 80 мм.
3 Определение сенсорного защитного оборудования см. в ISO 12100:2010, 3.28.5.
3.2 сенсорная штанга (pressure-sensitive bar) (далее - штанга): Защитное устройство, чувствительное к давлению, типа "механическое расцепление", состоящее из датчика (3.3) или датчиков и блока управления и одного или нескольких устройств переключения выходного сигнала (3.5), предназначенных для обнаружения контакта с человеком или частью тела человека и когда эффективная сенсорная поверхность (3.9) движется как одно целое для активирования датчика(ов).
Примечания
1 Датчик или датчики формируют сигнал, когда на часть их поверхности оказывается давление. Блок управления реагирует на сигнал от датчика и формирует выходной сигнал(ы) в систему управления машиной.
2 Длина датчика(ов) больше ширины. Сечение по всей сенсорной площади постоянно, а ее ширина обычно находится в пределах от 8 до 80 мм.
3 Определение сенсорного защитного оборудования см. в ISO 12100:2010, 3.28.5.
3.3 датчик (sensor): Часть кромки (3.1) или штанги (3.2), которая формирует ответный сигнал к достаточному давлению, приложенному к части его поверхности.
Примечание - Пункты 3.3 - 3.5 определяют функциональные компоненты кромки или штанги. Эти функции могут быть интегрированы в один узел или содержаться в любом количестве отдельных узлов (см. рисунок 1). Например, простая кромка или штанга, приводящая в действие позиционный переключатель, может рассматриваться как датчик, блок управления и устройство переключения выходного сигнала.
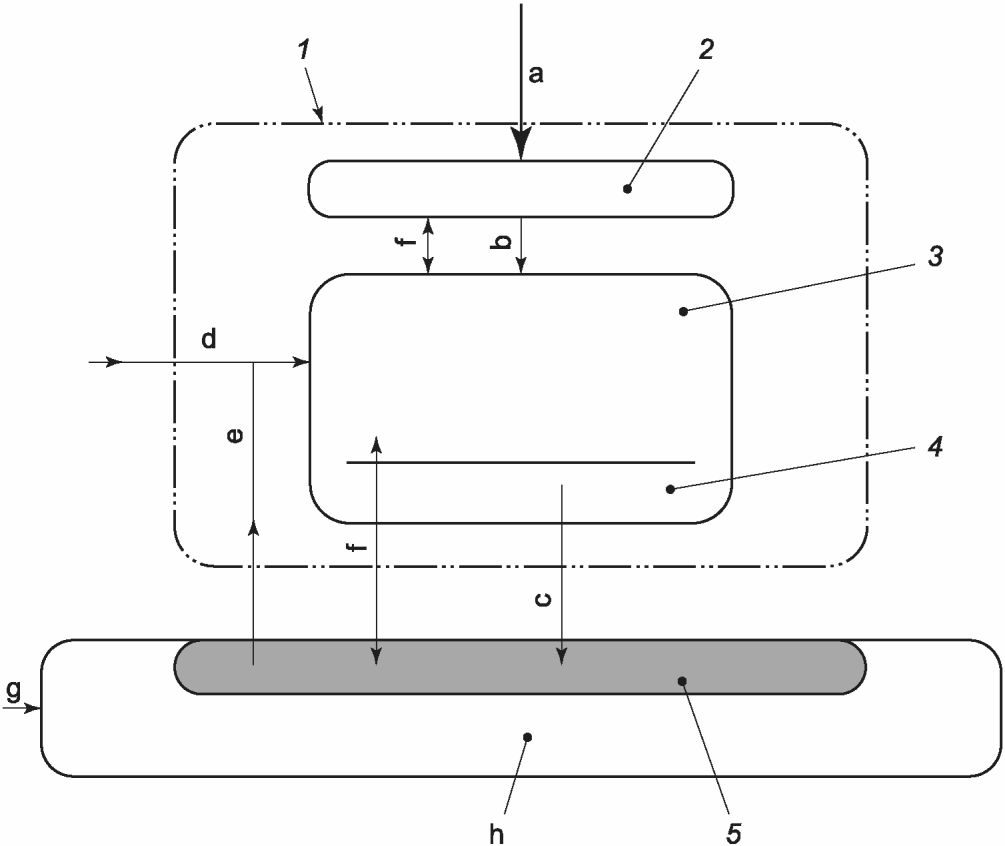
Условные обозначения:
1 - кромка или штанга; 2 - датчик(и); 3 - блок
управления <1>; 4 - устройство(а) переключения выходного
сигнала <1>; 5 - часть системы управления машиной
для обработки выходного сигнала кромки и штанги;
a - активирующее усилие; b - выходной сигнал датчика;
c - сигнал состояния "ВКЛ/ВЫКЛ"; d - сигнал ручного
сброса <2>; e - сигнал сброса от системы управления
машиной (при необходимости); f - контрольные сигналы
(дополнительно); g - сигнал ручного сброса в систему
управления машиной <3>; h - система(ы) управления машиной
--------------------------------
3.4 блок управления (control unit): Часть кромки (3.1) или штанги (3.2), которая отвечает условию датчика (3.3) и формирует выходные сигналы в систему управления машиной.
Примечание - Пункты 3.3 - 3.5 определяют функциональные компоненты кромки или штанги. Эти функции могут быть интегрированы в один узел или содержаться в любом количестве отдельных узлов (см. рисунок 1). Например, простая кромка или штанга, приводящая в действие позиционный переключатель, может рассматриваться как датчик, блок управления и устройство переключения выходного сигнала.
3.5 устройство переключения выходного сигнала (output signal switching device): Часть блока управления кромки (3.1) или штанги (3.2), которая соединена в систему управления машиной и передает выходные сигналы.
Примечание - Пункты 3.3 - 3.5 определяют функциональные компоненты кромки или штанги. Эти функции могут быть интегрированы в один узел или содержаться в любом количестве отдельных узлов (см. рисунок 1). Например, простая кромка или штанга, приводящая в действие позиционный переключатель, может рассматриваться как датчик, блок управления и устройство переключения выходного сигнала.
3.6 включенное состояние (ON state): Состояние, при котором выходная(ые) цепь(и) устройства переключения выходного сигнала (3.5) замкнута(ы) и позволяет(ют) течение тока или жидкости.
3.7 выключенное состояние (OFF state): Состояние, при котором выходная(ые) цепь(и) устройства переключения выходного сигнала (3.5) разомкнута(ы) и прерывает(ют) течение тока или жидкости.
3.8 активирующее усилие (actuating force): Любое усилие, приложенное к датчику (3.3), которое заставляет устройство переключения выходного сигнала (3.5) переходить в положение "ВЫКЛ" (3.7).
3.9 эффективная сенсорная поверхность (effective sensing surface): Часть поверхности датчика (3.3) или комбинации датчиков в пределах эффективного сенсорного угла (3.12) и эффективной сенсорной длины (3.10), при которой приложение активирующего усилия (3.8) создает состояние "ВЫКЛ" (3.7) в устройстве переключения выходного сигнала (3.5).
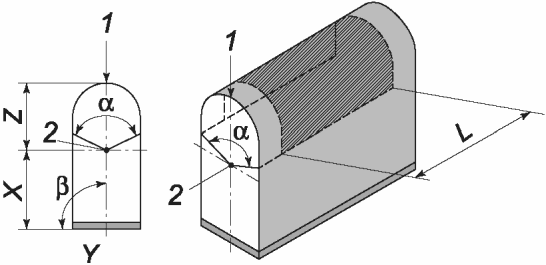
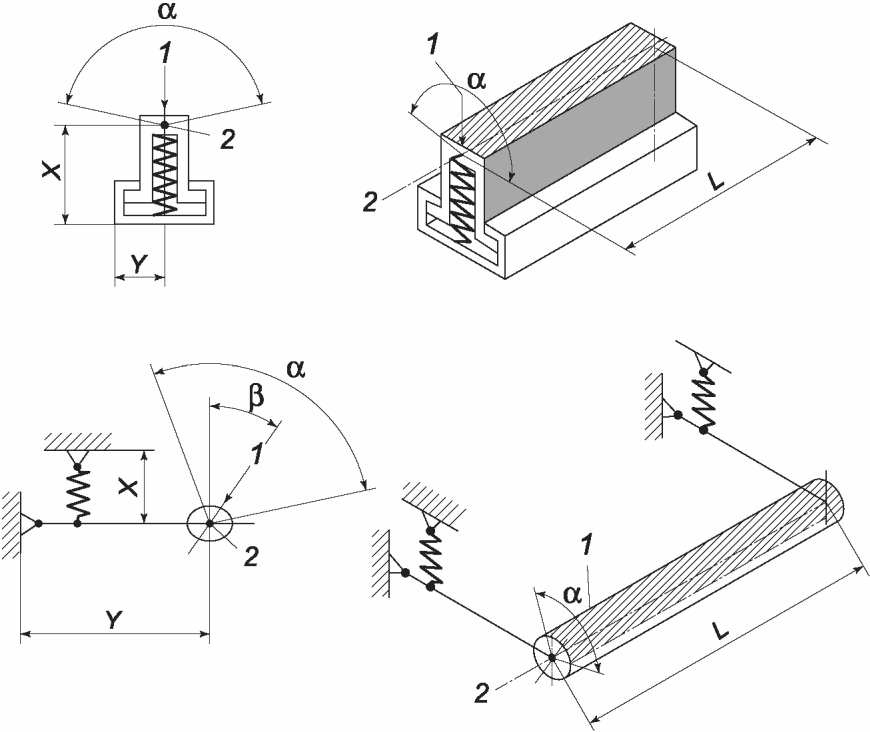
a) Симметричный с нечувствительной поверхностью на концах

b) Симметричный без нечувствительной поверхности на концах
c) Асимметричный с нечувствительной поверхностью на концах
d) Асимметричный без нечувствительной поверхности на концах
Условные обозначения:
1 - заданное направление; 2 - заданная ось; L - эффективная
сенсорная длина;  - эффективный сенсорный угол;
- эффективный сенсорный угол;
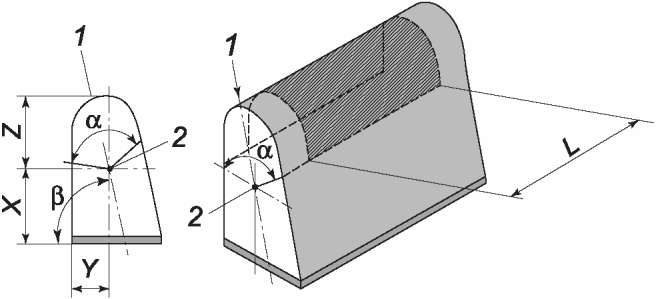
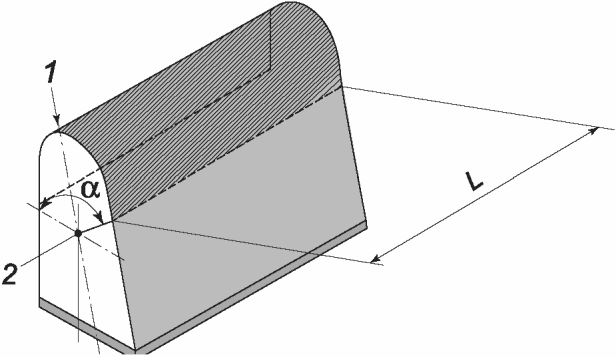
Условные обозначения:
1 - заданное направление; 2 - заданная ось; L - эффективная
сенсорная длина;  - эффективный сенсорный угол;
- эффективный сенсорный угол;
3.10 эффективная сенсорная длина (effective sensing length): Длина эффективной сенсорной поверхности (3.9).
3.11 заданная ось (reference axis): Линия в направлении длины датчика (3.3), положение которой в поперечном сечении датчика используется для определения эффективной сенсорной поверхности (3.9).
3.12 эффективный сенсорный угол (effective sensing angle): Угол вокруг заданной оси (3.11), который ограничивает эффективную сенсорную поверхность (3.9) вдоль эффективной сенсорной длины (3.10).
3.13 заданное направление (reference direction): Направление активации от точки на эффективной сенсорной поверхности (3.9) к заданной оси (3.11), которая делит пополам эффективный сенсорный угол (3.12) и перпендикулярна заданной оси.
3.14 нечувствительная поверхность (dead surface): Часть площади поверхности датчика (3.3) за пределами эффективной сенсорной поверхности (3.9).
3.15 предварительный ход (pre-travel): Расстояние, пройденное объектом, движущимся в направлении, перпендикулярном заданной оси (3.11), и в направлении оси приложенного активирующего усилия (3.8), измеренного от того места, где этот объект касается эффективной сенсорной поверхности (3.9) и где устройство переключения выходного сигнала (3.5) переходит в состояние "ВЫКЛ" (3.7) при заданных условиях.
Примечание - См. рисунок 4.
3.16 рабочий ход (working travel): Расстояние, пройденное объектом, движущимся в направлении, перпендикулярном заданной оси (3.11), где этот объект касается эффективной сенсорной поверхности (3.9) при определенных условиях, до места, где на указанный объект действует предельное усилие.
Примечание - См. рисунок 4.
3.17 перебег (overtravel): Разница между рабочим ходом (3.16) и предварительным ходом (3.15), когда оба измеряются одним и тем же объектом, применяемым в тех же условиях.
Примечание - См. рисунок 4.
3.18 соотношение усилие-ход (force-travel relationship): Зависимость между усилием, приложенным перпендикулярно заданной оси (3.11) и расстоянием, пройденным определенным объектом перпендикулярно заданной оси в определенных условиях.
Примечание - См. рисунок 4.
3.19 сброс (reset): Функция, которая допускает состояние "ВКЛ" (3.6) в устройстве переключения выходного сигнала (3.5), с учетом того, что определенные условия выполнены.
Примечание - См. приложение A.
3.20 общий ход (total travel): Перемещение или деформация эффективной сенсорной поверхности (3.9) кромки (3.1) или штанги (3.2), которая измеряется в направлении активирующего усилия (3.8) от точки контакта до точки, в которой не происходит дальнейшей значительной деформации эффективной сенсорной поверхности (например, при усилии 600 Н).
3.21 начало блокировки (start interlock): Средства, предотвращающие пуск автоматического устройства при подключении питания (например, электропитания) к кромке (3.1) либо штанге (3.2) или прерывающие и восстанавливающие.
3.22 рабочая скорость (operating speed): Любая скорость, с которой объект прижимается к датчику (3.3) и которая заставляет устройство переключения выходного сигнала (3.5) переходить в состояние "ВЫКЛ" (3.7).
Примечание - Для целей настоящего стандарта "нормальная работа" означает соответствие требованиям раздела 4, проверенным в соответствии с разделом 7.
Изготовитель сенсорного защитного устройства должен указать эффективную сенсорную поверхность, задав размеры X, Y, Z, углы  и
и  и эффективную длину измерения L в соответствии с рисунками 2 и 3.
и эффективную длину измерения L в соответствии с рисунками 2 и 3.
Эффективный сенсорный угол сенсорных защитных устройств с высотой (см. рисунок 2) X + Z >= 40 мм должен составлять >= 90°.
Эффективный сенсорный угол сенсорных защитных устройств высотой X + Z < 40 мм должен составлять не менее 40°.
Если эффективный сенсорный угол меньше 90°, в информации по использованию должно быть четкое предупреждение (см. раздел 6).
ВНИМАНИЕ. Усилия, указанные в настоящем подпункте, в первую очередь предназначены для целей оценки сенсорной характеристики устройства. Настоящие усилия не следует рассматривать в качестве безопасных усилий (см. приложение C и ISO 14120:2002, 5.2.5.2 для руководства).
Датчик кромки или штанги должен формировать выходной сигнал, достаточный для того, чтобы заставить устройство переключения выходного сигнала перейти в состояние "ВЫКЛ", когда прилагается указанное минимальное усилие. Настоящее требование должно выполняться, когда активирующее усилие применяется перпендикулярно заданной оси. Активирующее усилие не должно превышать значений, указанных в таблице 2, при применении с испытательными скоростями (от минимальной до максимальной рабочей скорости) по эффективной сенсорной поверхности и в диапазоне рабочих температур с датчиком в монтажных направлениях, которые указаны изготовителем, пригодных для использования.
Таблица 2
и активирующими усилиями
Испытуемые образцы (см. рисунок 5) | 1 | 2 | 3 |
Активирующее усилие (N) | 150 | 600 | 50 |
Образец для испытания 3 должен применяться только к кромкам или штангам, которые предназначены для обнаружения пальцев.
Метод испытаний см. в 7.7.2.
Предварительный ход не должен быть больше, чем указано изготовителем.
Метод испытаний см. в 7.7.3.
Рабочий ход должен быть не менее указанного изготовителем.
Метод испытаний см. в 7.7.4.
Перебег должен быть не менее указанного изготовителем.
Метод испытаний см. в 7.7.1.
Изготовитель кромки или штанги должен обеспечить данные взаимосвязи для репрезентативной выборки в виде диаграммы, как показано на рисунке 4. Настоящие данные должны определяться усилием, прикладываемым к образцу 1 (см. рисунок 5). Изготовитель должен указать температуру, рабочую скорость (скорости), монтажное направление и направление работы, при котором были определены данные.
Каждая диаграмма должна показывать, по меньшей мере:
- активирующее усилие и предварительный ход (точка A на рисунке 4);
- рабочий ход для усилия реакции 250 Н (точка B1 на рисунке 4, см. примечание 2) или усилия в соответствии со стандартом типа C (см. примечание 3);
- рабочий ход для усилия реакции 400 Н (точка B2 на рисунке 4, см. примечание 2) или усилия, как указано в стандарте типа C (см. примечание 3);
- соотношение усилие-ход выше 400 Н, например, до 600 Н (точка C на рисунке 4).
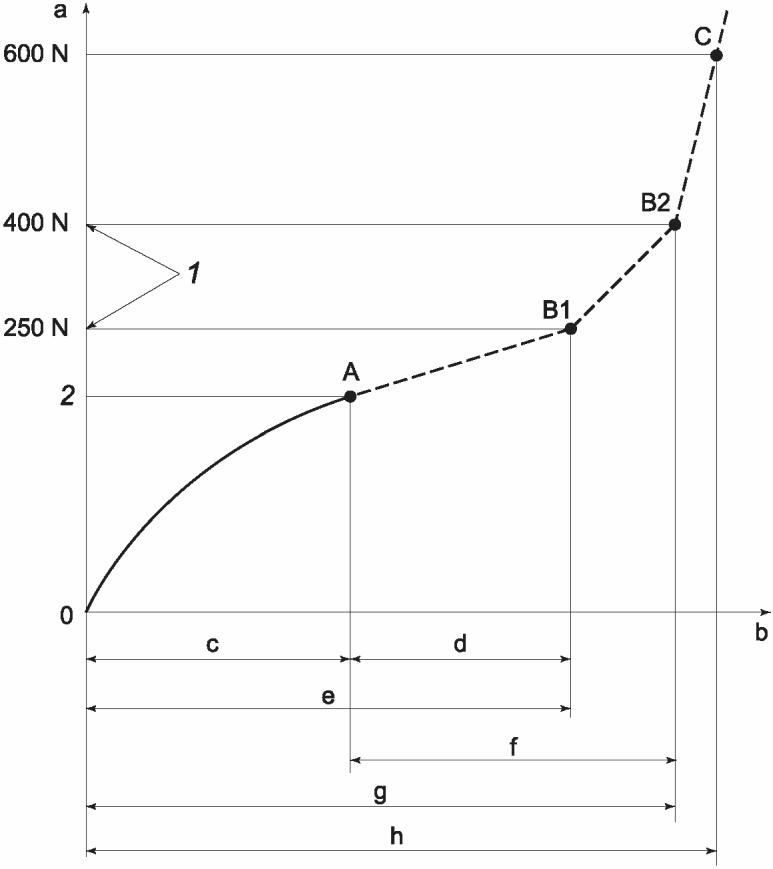
Условные обозначения:
A - предварительный ход (активирующая точка и активирующее
усилие при максимальной рабочей скорости); B - рабочий ход
(например, точки B1 и B2 усилие-перемещение возникают
при усилии 250 Н или 400 Н при рабочей скорости <= 10
мм·с-1); C - полный ход (например, происходит при усилии 600
Н при рабочей скорости <= 10 мм·с-1); 1 - заданное усилие;
2 - самое низкое активирующее усилие; a - усилие в ньютонах
(Н); b - ход в миллиметрах (мм); c - предварительный ход;
d - перебег при 250 Н; e - рабочий ход при 250 Н;
f - перебег при 400 Н; g - рабочий ход при 400 Н;
h - общий ход
Примечание - Испытуемый образец 1 по рисунку 5 используется для приложения усилий.
Примечания
1 Направления работы, которые необходимо учитывать, зависят от предполагаемого применения кромки или штанги.
2 См. введение и приложение C относительно допустимых усилий.
3 Усилия реакции 250 Н, 400 Н и 600 Н приведены только в качестве примеров. Если максимально допустимое усилие предусмотрено в стандарте типа C, рабочий ход получается из соответствующей точки на кривой усилие-ход, показанной на рисунке 4.
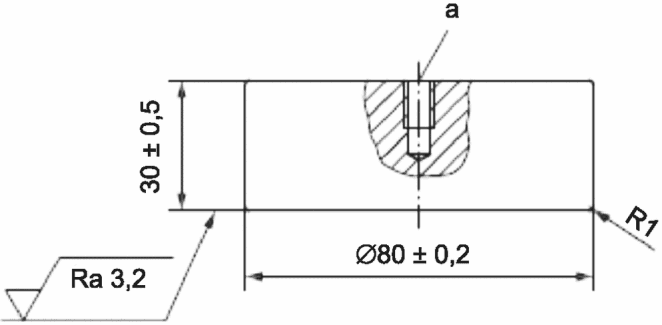
a) Испытуемый образец 1
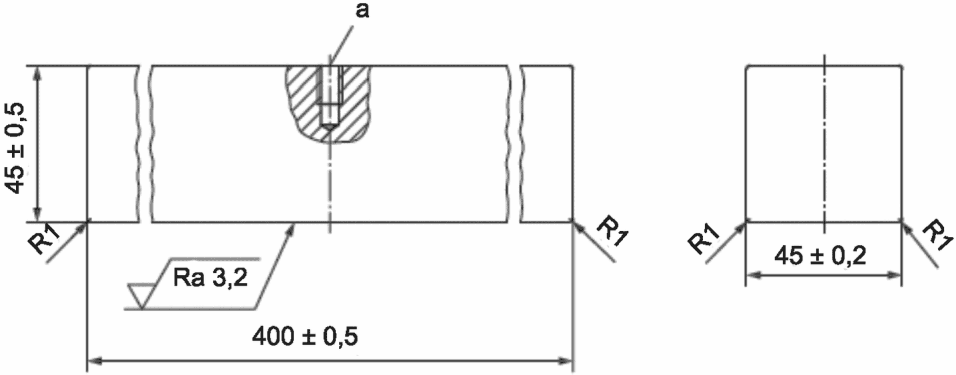
b) Испытуемый образец 2
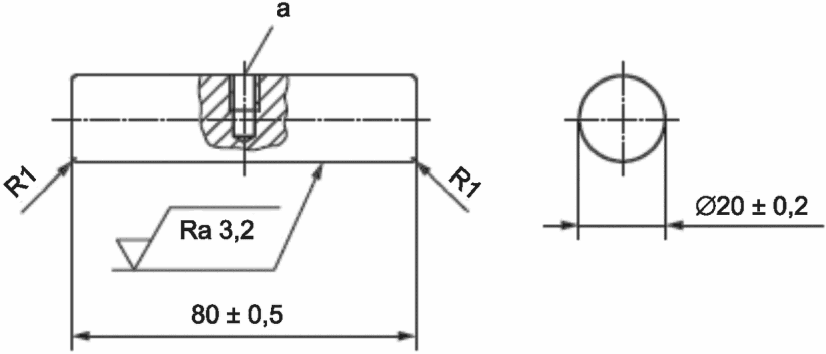
c) Испытуемый образец 3
a - только в качестве предложения по монтажу
Рисунок 5 - Испытуемые образцы 1 - 3 (см. 7.3)
Метод испытаний см. в 7.6.
Минимальная рабочая скорость не должна превышать 10 мм·с-1.
Методы испытаний см. в 7.8.
4.8.1 Общие положения
Требования 4.8.2 и 4.8.3 применяются к кромкам и/или штангам для их приемки в качестве достоверно испытанных компонентов.
См. метод испытаний в 7.8.1.
После 10 000 операций кромка или штанга не должны иметь дефектов, влияющих на характеристики безопасности (см. 7.8.3). Настоящее требование применяется к одиночным датчикам, используемым по одному или в комбинации (4.8.3).
Метод испытаний см. в 7.8.2.
Если эффективная сенсорная поверхность состоит из более чем одного датчика, после еще 1000 операций в каждом соединении кромка или штанга не должны иметь дефектов, влияющих на характеристики безопасности (см. 7.8.3).
Метод испытаний см. в 7.9.
Выходной сигнал датчика должен иметь значение, при котором устройство переключения выходного сигнала переключается в положение "ВЫКЛ", когда активирующее усилие приложено перпендикулярно заданной оси к эффективной сенсорной поверхности.
4.10.1 Системы, в которых выход датчика остается в выключенном состоянии до тех пор, пока действует активирующее усилие
Когда минимальное активирующее усилие приложено перпендикулярно заданной оси, устройство переключения выходного сигнала должно переходить из состояния "ВКЛ" в состояние "ВЫКЛ" и оставаться в состоянии "ВЫКЛ", по меньшей мере до тех пор, пока действует активирующее усилие.
См. приложение A.
4.10.2 Системы, в которых выход датчика не остается в выключенном состоянии, если остается активирующее усилие
Когда минимальное активирующее усилие приложено перпендикулярно заданной оси, устройство переключения выходного сигнала должно перейти из состояния "ВКЛ" в состояние "ВЫКЛ". Поскольку устройство переключения выходного сигнала может вернуться в состояние "ВКЛ", когда активирующее усилие остается, требуются дополнительные защитные меры для обеспечения отсутствия опасности. Устройство переключения выходного сигнала может вернуться в состояние "ВКЛ" только при подаче сигнала сброса (см. приложение A) или при принятии дополнительных мер безопасности, например автоматическое устранение опасного перемещения. Такие дополнительные меры должны быть указаны в информации для использования, см. 6.3.
См. приложения A и G для систем, относящихся к конкретным приложениям.
Метод испытаний см. в 7.10.
Функция сброса кромки или штанги должна соответствовать общим требованиям ISO 13849-1:2006, 5.2.2, и функциональным требованиям приложения A.
Чтобы сбросить блокировку запуска или блокировку перезапуска кромки или чувствительного к давлению штанги, должен быть подан сигнал сброса:
- непосредственно к блоку управления сенсорным защитным устройством;
- через систему управления машиной.
Если предусмотрен ручной сброс, он должен работать в соответствии с приложением A и ISO 13849-1:2006, 5.2.2.
Методы испытаний см. в 7.11.
4.12.1 Общие положения
Кромка или штанга должны продолжать нормально работать в условиях окружающей среды, заявленных изготовителем. Минимальные требования указаны в 4.12.2 - 4.12.5.
Кромка или штанга должны продолжать работать в нормальном режиме в следующих климатических условиях.
Минимальный диапазон температур должен составлять от 5 °C до 40 °C. Если изготовитель заявляет, что кромка или штанга подходят для более широкого диапазона температур, тогда он должен соответствовать настоящему требованию в указанном диапазоне температур (см. 7.11.2).
После хранения при относительной влажности 93% и температуре 40 °C в течение четырех суток система должна продолжать нормальную работу (см. 7.11), а целостность электрической изоляции должна поддерживаться (см. 7.11.3).
Метод испытаний см. в 7.11.4.
Кромка или штанга должны продолжать работать в нормальном режиме в условиях, указанных в таблице 13.
Примечание - Кромка или штанга могут быть спроектированы так, чтобы обеспечить более высокий уровень помехоустойчивости.
Метод испытаний см. в 7.11.5.
Кромка или штанга должны продолжать работать без активирования следующими условиями вибрации в соответствии с IEC 60068-2-6:
- диапазон частот от 10 до 55 Гц;
- смещение 0,15 мм;
- 10 циклов на ось;
- скорость развертки 1 октава в минуту.
После этого испытания на вибрацию кромка или штанга должны продолжать нормальный режим работы.
Метод испытаний см. в 7.11.6.
Штанга должна продолжать работать без активации в следующих условиях.
Требования относятся к датчику штанги только в заданном и противоположном направлениях и должны соответствовать IEC 60068-2-27:
- пиковое ускорение: 100 м·с-2;
- длительность импульса: 16 мс;
- форма импульса: полусинусоида;
- число импульсов в каждом направлении: 1000;
- частота примерно: 1 Гц.
Штанга должна продолжать работать без активации в вышеуказанных условиях. После этого функционального испытания штанга должна продолжать работать в обычном режиме.
Кромка или штанга должны продолжать работать в нормальном режиме при воздействии изменений источника питания, указанных в 4.13.2 и 4.13.3.
Метод испытаний см. в 7.12.2.
Кромка или штанга должны соответствовать требованиям IEC 60204-1:2005, 4.3.
Метод испытаний см. в 7.12.3.
Кромка или штанга должны продолжать работать в обычном режиме, когда подвергаются изменениям в электропитании, как указано изготовителем и в соответствии с требованиями ISO 4413 для гидравлических систем и ISO 4414 для пневматических систем.
Если устройства защиты от избыточного давления для этого источника питания не встроены, отклонения избыточного давления за пределами указанного диапазона не должны приводить к возникновению опасности.
Изменения в подаче питания вне указанного диапазона не должны приводить к возникновению опасности.
Метод испытаний см. в 7.13.1.
4.14.1 Общие положения
Электрооборудование (компоненты) кромки или штанги должно:
- соответствовать действующим международным стандартам;
- быть пригодным для предполагаемого использования;
- эксплуатироваться в пределах установленных для них номинальных значений.
4.14.2 Защита от поражения электрическим током
Защита от поражения электрическим током должна быть обеспечена в соответствии с IEC 60204-1:2005, 6.1, 6.2 и 6.3.
4.14.3 Защита от перегрузки по току
Защита от перегрузки по току должна быть обеспечена в соответствии с IEC 60204-1:2005, 7.2.1, 7.2.3, 7.2.7, 7.2.8 и 7.2.9.
4.14.4 Электромеханические устройства
Электромеханические блоки управления и устройства переключения выходного сигнала должны отвечать соответствующим требованиям IEC 60947-5-1.
4.14.5 Степень загрязнения
Электрооборудование должно соответствовать степени загрязнения 2 в соответствии с IEC 61439-1:2011, 7.1.3.
4.14.6 Воздушные зазоры и пути утечки
Электрооборудование должно быть спроектировано и изготовлено в соответствии с IEC 61439-1:2011, 8.3 и 10.4.
4.14.7 Электропроводка
Электрооборудование должно быть подключено в соответствии с IEC 61439-1:2011, 11.10.
Метод испытаний см. в 7.13.2.
Гидравлическое оборудование должно отвечать соответствующим требованиям ISO 4413.
Метод испытаний см. в 7.13.3.
Пневматическое оборудование должно отвечать соответствующим требованиям ISO 4414.
Метод испытаний см. в 7.14.
4.17.1 Датчик
Изготовитель должен указать пригодность датчика для конкретной среды, например в запыленных или влажных условиях. Настоящая спецификация должна быть определена как индекс защиты, например, IP 44 согласно IEC 60529. Те части датчика, которые содержат электрические компоненты, должны иметь корпус, соответствующий как минимум требованиям IP 54. Если изготовитель указывает, что датчик может быть погружен в воду, корпус датчика должен соответствовать требованиям как минимум IP 67. Изготовитель должен указать время и глубину погружения.
4.17.2 Блок управления и устройство переключения выходного сигнала
Блок управления и любой внешний корпус устройства переключения выходного сигнала должны как минимум соответствовать требованиям IP 54. Если блок управления и устройство переключения выходного сигнала предназначены для установки в другой корпус оборудования управления, этот корпус должен отвечать требованиям уровня защиты, относящимся к данному применению. В этих условиях блок управления и устройство переключения выходного сигнала должны как минимум соответствовать требованиям IP 2X.
Метод испытаний см. в 7.15.
Если изготовитель указывает, что для датчика можно использовать дополнительные покрытия, требования настоящего стандарта все равно должны выполняться (см. приложение D).
Метод испытаний см. в 7.16.
Там, где требуется доступ к внутренней части любой кромки или штанги, это должно быть возможно только с помощью ключа или инструмента.
4.20 Уровни и категории эффективности защиты для компонентов систем управления, связанных с безопасностью SRP/CS в соответствии с ISO 13849-1
Метод испытаний см. в 7.17.
4.20.1 Кромка и штанга должны соответствовать требованиям уровня эффективности (PL) и категории, для которой они указаны и отмечены. Уровни эффективности и категории указаны в ISO 13849-1.
В настоящее время системы импульса давления не считаются соответствующими требованиям категории 1.
Примечание - Система импульса давления может удовлетворять требованиям категории 2, когда функция безопасности проверяется или контролируется. См. также D.3.5 и G.3.
4.20.2 Кромка и штанга должны соответствовать, по крайней мере, требованиям уровня производительности согласно ISO 13849-1, а также требованиям настоящего стандарта.
Механическое повреждение поверхности датчика, не влияющее на функцию безопасности (например, царапины от стружки), не считается неисправностью.
4.20.3 Значения B10d для датчика должны определяться путем испытаний.
Результаты испытаний должны быть оформлены протоколами испытаний. Они должны включать, по меньшей мере, следующее:
- тип датчика;
- точки измерения;
- температуру (окружающей среды);
- рабочее напряжение и рабочий ток;
- частоту переключения;
- место испытаний;
- испытательную нагрузку;
- скорость активации;
- количество операций;
- значения B10d;
- виды неисправностей (отказов);
- испытателя, испытательную лабораторию, дату и подпись.
4.20.4 Если кромка или штанга соответствует категории 3, его конструкция может отличаться от назначенной архитектуры в соответствии с ISO 13849-1:2006, 6.2.
Исключения неисправностей должны быть перечислены и объяснены в инструкциях по эксплуатации. Исключений неисправностей, которые недопустимы из-за обоснованно предсказуемого неправильного использования кромки или штанги, быть не должно.
Если для определения PL используется исключение отказов, не требуется рассчитывать охват диагностикой и не следует учитывать его при определении уровня эффективности. В этих условиях для достижения уровня производительности d должно присутствовать высокое ожидание среднего времени опасного отказа (MTTFd).
Метод испытаний см. в 7.18.
При необходимости внесения корректировок при вводе в эксплуатацию изготовитель должен предоставить руководство по эксплуатации для возможности внесения корректировок, чтобы можно было выполнить требования настоящего стандарта. Должны быть предусмотрены меры для проверки правильности внесения таких корректировок. Регулируемые элементы должны быть доступны только с помощью ключа, кода безопасности или инструмента.
Метод испытаний см. в 7.19.
Должны быть предусмотрены средства для надежной фиксации всех частей датчика в указанном направлении монтажа. Закрепленный датчик должен иметь достаточную механическую прочность, чтобы выдерживать максимальные усилия в указанных направлениях, которые заявлены изготовителем.
Метод испытаний см. в 7.20.
После того, как эффективная сенсорная поверхность датчика была деформирована или смещена движением рабочего хода с использованием испытуемого образца 1 в течение 24 ч, эффективная чувствительная поверхность должна восстановиться, как показано в таблице 3.
Таблица 3
Время восстановления | Изменение по высоте: рабочий ход в 10 мм·с-1 при 250 Н в процентах |
30 с | < 20% |
5 мин | < 10% |
30 мин | < 5% |
Рабочий ход в этом случае берется из испытания N 4 (см. 7.7) при испытательной скорости 10 мм·с-1 при усилии 250 Н.
Если изготовитель указывает, что кромка или штанга подходят для непрерывной деформации в течение более 24 ч, то датчик должен восстановиться в соответствии с таблицей 3 после деформации за указанное время.
После того, как эффективная сенсорная поверхность датчика была деформирована или перемещена рабочим ходом при использовании испытуемого образца 1 в течение не менее 24 ч, кромка или штанга должны иметь нормальный режим работы (включенное состояние) в течение 30 с [см. C.2.1 d)].
Метод испытаний см. в 7.21.
Если компоненты различных конфигураций в пределах штанги или кромки взаимозаменяемы с помощью штепсельных соединений, неправильное размещение или замена этих компонентов не должны вызывать опасности выхода из строя.
Если датчик подключен через вилку и розетку, снятие или отсоединение датчика от вилки и розетки от блока управления должно привести к тому, что устройство переключения выходного сигнала перейдет в состояние "ВЫКЛ".
Метод испытаний см. в 7.22.
Открытые части кромок или штанг не должны иметь острых углов, кромок, шероховатых поверхностей и т.д., которые могут привести к травмам людей, которые могут вступить в контакт с устройством (устройствами) (см. ISO 12100:2010, 6.2.2.1).
Метод испытаний см. в 7.23.
Кромки и штанги должны соответствовать ISO 12100:2010, 6.3.2.
Штанги см. также в приложении D.
Метод испытаний см. в 7.24.
Датчики кромок или штанг должны быть сконструированы таким образом, чтобы их работа не могла быть преднамеренно запрещена или заблокирована простыми средствами, см. также D.3.
Метод испытаний см. в 7.25.
5.1 Кромки и штанги должны быть маркированы в соответствии с ISO 12100:2010, 6.4.4, а для электрооборудования - с указанием номинального напряжения и тока.
См. также IEC 60204-1:2005, раздел 16.
5.2 Все этикетки и маркировки должны быть надежно прикреплены и долговечны в течение ожидаемого срока службы детали кромки или штанги, к которой она прикреплена.
5.3 Любая часть кромки или штанги, которая может быть заменена в соответствии с инструкцией по эксплуатации, должна быть промаркирована номером типа или номером детали, как указано в руководстве и правилах отслеживания.
5.4 Этикетка(и) блока управления должна(ы) также содержать следующую информацию или однозначно указывать способ, где эту информацию можно найти:
- PL и категория по ISO 13849-1 для кромки или штанги;
- время отклика кромки или штанги;
- со сбросом или без;
- номер детали.
6.1 Общие положения
Информация и рекомендации по установке, вводу в эксплуатацию и испытаниям приведены в приложении F.
Информация, которая должна быть предоставлена пользователю, и способ ее представления должны соответствовать ISO 12100:2010, 6.4. Она должна быть четко идентифицирована с продуктом.
Изготовитель должен предоставить соответствующую информацию из следующего списка, чтобы он помог в выборе подходящей кромки или штанги:
- ограничения по конфигурации, количеству и длине датчиков, подключаемых к одному блоку управления;
- ограничения на длину и характеристики соединений между датчиком(ами) и блоком(ами) управления;
- ориентация(и) установки, при которой может использоваться датчик;
- средства крепления датчика и блока управления;
- усилие или усилия, которые может выдержать установленный датчик, и направление(я), в которых они применяются;
- максимальные габариты датчика;
- вес датчика на метр длины и вес блока управления;
- дополнительные детали покрытия датчика (при необходимости);
- отношение(я) усилие-ход, показывающее предварительный ход и перебег в виде таблицы или диаграммы согласно рисунку 4, и объяснение того, как он используется (например, ключ);
- таблица химической стойкости датчика;
- диапазон рабочих температур;
- требования к источнику питания;
- спецификация(и) корпуса блока управления в соответствии с IEC 60529;
- спецификация(и) корпуса датчика в соответствии с IEC 60529;
- категория(и) и уровень(и) эффективности согласно ISO 13849-1;
- процедура выбора согласно приложению C;
- критическая длина соединений между отдельными компонентами;
- деформационное поведение с течением времени;
- способность устройства (устройств) переключения выходного сигнала в соответствии с IEC 60947-5-1;
- руководство по эксплуатации;
- конфигурация(и) контактов устройств(а) переключения выходного сигнала;
- пригодность для обнаружения пальцев;
- минимальная рабочая скорость, если применимо (например, для пневматических систем);
- индикация исключений неисправностей (см. ISO 13849-1:2006, раздел 11);
- пояснение способа расчета уровня эффективности со ссылкой на среднее время работы (в часах в день и днях в году) переменных параметров и среднее время между началом двух последовательных циклов рассматриваемого компонента (время цикла);
- заявление о том, что пользователь должен определить PL (уровень эффективности), требуемый для его применения.
6.3.1 Информация по установке и вводу в эксплуатацию
Приведена следующая информация по установке и вводу в эксплуатацию кромки или штанги.
a) Информация касательно кромки или штанги, включая:
1) подробное описание кромки или штанги;
2) ограничения по конфигурации, количеству и длине датчиков, подключаемых к одному блоку управления;
3) ограничения на длину и характеристики соединений между датчиком(ами) и блоком(ами) управления;
4) порядок определения перебега для кромки или штанги, с примерами (см. приложение C);
5) диапазон применения и условия, для которых кромка или штанга предназначены или одобрены, включая категорию, уровень эффективности и значения B10d согласно ISO 13849-1;
6) принципиальные схемы, обеспечивающие схематическое представление функций безопасности и примеры интерфейсов управления машиной;
7) дополнительные защитные меры (согласно 4.10.2), которые могут потребоваться для достижения требуемого уровня безопасности для конкретных применений;
8) номинальные значения, характеристики и расположение всех входных/выходных клемм (например, максимальное номинальное значение предохранителей или установка устройства защиты от перегрузки по току);
9) тип и периодичность автоматической системы проверки, где это применимо;
10) руководство по химической, физической и экологической устойчивости (например, устойчивость к растворителям, допустимая весовая нагрузка, диапазон рабочих температур, допустимое изменение напряжения питания);
11) руководство по эксплуатации кромки или штанги в качестве альтернативы монтажному направлению;
12) указание на то, разработаны ли кромка или штанга с внешним сбросом или без него в соответствии с приложением A.
b) Информация касательно упаковки, транспортировки, обращения и хранения кромки и штанги, в том числе:
1) размеры;
2) масса (т.е. килограмм на метр длины);
3) описание упаковки и способы распаковки во избежание повреждения кромки или штанги;
4) методы транспортировки и обработки для предотвращения повреждений или телесных повреждений;
5) требования к хранению (плоская укладка, прямо или в бухтах, диапазон температур и т.д.).
c) Информация, касающаяся установки и ввода в эксплуатацию кромки или штанги, в том числе:
1) предупреждение о том, что перед началом любых монтажных работ следует полностью прочитать информацию по использованию;
2) требования к поверхности, на которой будет установлен датчик;
3) методы установки, включая необходимые инструменты;
4) конструктивные особенности эффективных сенсорных поверхностей, которые могут влиять на функцию безопасности и информацию о том, как можно свести к минимуму влияние нечувствительных (мертвых) поверхностей путем установки (включая чертеж, если это необходимо);
5) график испытаний, которые необходимо провести после монтажа, чтобы установить, что кромка или штанга функционируют, установлены и подключены к управлению машиной правильно;
6) предупреждение о том, что общая безопасность машины и ее средств защиты зависит от качества, надежности и правильности установки интерфейса между ними;
7) указание на то, что категория или категории и уровень(и) эффективности, заявленные для кромки или штанги, должны соответствовать категориям и уровням эффективности, установленным по оценке риска пользователя;
8) лист регистрации, который должен быть заполнен установщиком, с указанием того, какой блок управления и датчик(и) установлены.
d) Обучение: рекомендации по минимальным требованиям к обучению персонала, устанавливающего оборудование, для обеспечения того, чтобы кромка или штанга были установлены в соответствии с настоящим документом.
6.3.2 Информация касательно работы кромки или штанги
Должна быть предоставлена следующая информация, касающаяся работы кромки или штанги.
a) Информация касательно использования кромки или штанги, включая:
1) назначение и способ работы блока управления и индикаторов;
2) сведения об ограничениях использования;
3) инструкции по идентификации неисправности и перезапуску после вмешательства/активации;
4) индикация исключений неисправности;
5) пояснение к рассчитанному PL с привязкой к переменным параметрам среднего времени работы, среднего времени выполнения работы и времени цикла;
6) заявление о том, что пользователь должен определить PL, необходимый для его применения;
7) предупреждение о том, что машину нельзя перезапускать при наличии опасности.
b) Информация по техническому обслуживанию, в том числе:
1) предупреждение о том, что инструкции по техническому обслуживанию должны быть прочитаны до того, как будут предприняты какие-либо попытки технического обслуживания;
2) характер и периодичность испытаний, проверок и технического обслуживания;
3) инструкция по допустимой настройке, регулировке и очистке;
4) действия, которые требуют определенных технических знаний и/или определенных навыков и, следовательно, должны выполняться исключительно квалифицированными лицами, прошедшими соответствующую подготовку;
5) информация, например чертежи и принципиальные схемы, позволяющие обученному персоналу выполнять поисковые работы;
6) подробности испытаний, необходимых после замены компонентов, чтобы установить, что кромка или штанга функционируют в соответствии с проектом;
7) предупреждение о том, что все детали (покрытия, скобы, окантовочные планки, крепления и т.п.), снятые во время технического обслуживания, должны быть переустановлены после технического обслуживания и что если такие детали не установлены должным образом, эффективность кромки или штанги может быть нарушена;
8) перечень деталей, заменяемых пользователем;
9) предупреждение о том, что пользователем могут быть заменены только детали, одобренные изготовителем, и что в случае использования неутвержденных запасных частей или внесения неутвержденных модификаций эффективность кромки или штанги может быть ухудшена;
10) наименование и адрес изготовителя и/или компетентной сервисной организации.
c) Требования к обучению: рекомендации по минимальным требованиям к обучению персонала пользователя, в том числе операторов и обслуживающего/инспекционного персонала, чтобы обеспечить использование и техническое обслуживание кромки или штанги в соответствии с настоящим стандартом.
d) Периодические функциональные испытания.
Руководство по эксплуатации должно содержать сведения о периодическом испытании датчика. Для этой цели требуется следующая информация:
1) указание на то, что интервал испытаний зависит от использования кромки или штанги и что он должен быть указан оператором в соответствии с национальными законодательными требованиями;
2) указание максимального интервала испытаний, например испытания не реже одного раза в три месяца.
Примечание - Дополнительные рекомендации по составлению руководства по эксплуатации, составлению и редактированию информации для использования приведены в ISO 12100:2010, 6.4.5.2 и 6.4.5.3.
7.1 Общие положения
Примечание - Возможно, не все испытания, приведенные в настоящем стандарте, можно проводить, когда соответствующие кромки и штанги были разработаны и встроены в оборудование компанией-изготовителем. В этом случае испытания следует проводить до установки сенсорного защитного устройства в машину.
Следующие проверки, анализы или испытания должны определить соответствие кромок или штанг требованиям настоящего стандарта. Испытания должны проводиться на готовых кромках или штангах при наименее благоприятных условиях, указанных изготовителем. Если не указано иное, эти испытания должны проводиться при температуре 20 °C.
Должны применяться следующие допуски:
- температура: +/- 5 °C;
- скорость испытания: +/- 10%.
Если на результаты испытаний влияют другие условия окружающей среды, например атмосферное давление или относительная влажность, они должны быть зарегистрированы.
Если не указано иное, функционирование кромки или штанги должно быть проверено следующим образом: испытуемый образец 1 с соответствующим активирующим усилием, указанным в таблице 2, прикладывается к эффективной сенсорной поверхности в заданном направлении при максимальной рабочей скорости и в одном месте (насколько это возможно, в самом неблагоприятном месте).
Для специальных применений могут быть разработаны некоторые кромки или штанги и изготавливаться как часть машины. В этом случае может оказаться невозможным или нецелесообразным представить эти устройства для всех испытаний, изложенных в настоящем разделе, и поэтому соответствующие требования могут быть проверены с помощью анализа. Если испытания не проводятся, изготовитель должен объяснить, почему эти испытания были исключены, и предоставить информацию о выполнении этих требований.
7.2 Образцы для испытаний
7.2.1 Датчик
Для проведения испытания, приведенного в настоящем разделе, потребуются образцы датчиков, указанные в таблице 4.
Таблица 4
N образца для испытаний | Длина образца, м | Подпункт настоящего стандарта |
1 | от 0,75 до 1 | |
2 | от 0,75 до 1 | |
3 | 0,5 | |
4 <a> | 0,5 | |
Испытания, не указанные в таблице 4, могут быть проведены с образцом для испытаний 1, 2 или 3.
Если кромка или штанга имеют эффективную сенсорную поверхность, состоящую из комбинации датчиков, то должны быть предоставлены датчики для подключения к одному блоку управления. Если применимо, максимальное указанное количество комбинаций датчиков должно использоваться для проверки требований 4.2 - 4.7, 4.9 - 4.11, 4.13, 4.18, 4.22 и 4.27.
Если длина датчика влияет на характеристики выходного сигнала датчика, необходимо использовать датчик с максимальной эффективной длиной измерения, указанной изготовителем (4.1).
7.2.2 Блоки управления и устройства переключения выходного сигнала
Должны быть предусмотрены три блока управления и устройства переключения выходного сигнала: два блока, соответствующих производственным блокам, и, при необходимости, специально подготовленный для проведения испытаний в аварийных условиях.
Если не указано иное, испытания проводят на испытуемых образцах, показанных на рисунке 5.
Испытуемые образцы должны быть изготовлены из соответствующего алюминиевого сплава.
7.4 Испытание N 1. Данные по безопасности для выбора, установки, ввода в эксплуатацию, эксплуатации и технического обслуживания подходящих кромок или штанг
Необходимо проверить, что информация изготовителя содержит все данные, связанные с безопасностью.
7.5.1 Общие положения
Если изготовитель указывает различные монтажные направления (см. рисунок 6), необходимо проверить, влияет ли монтажное направление на функцию безопасности. Настоящая проверка должна выполняться, во-первых, при осмотре и/или практическом опыте и, при необходимости, должна быть дополнена анализом или следующими испытаниями.
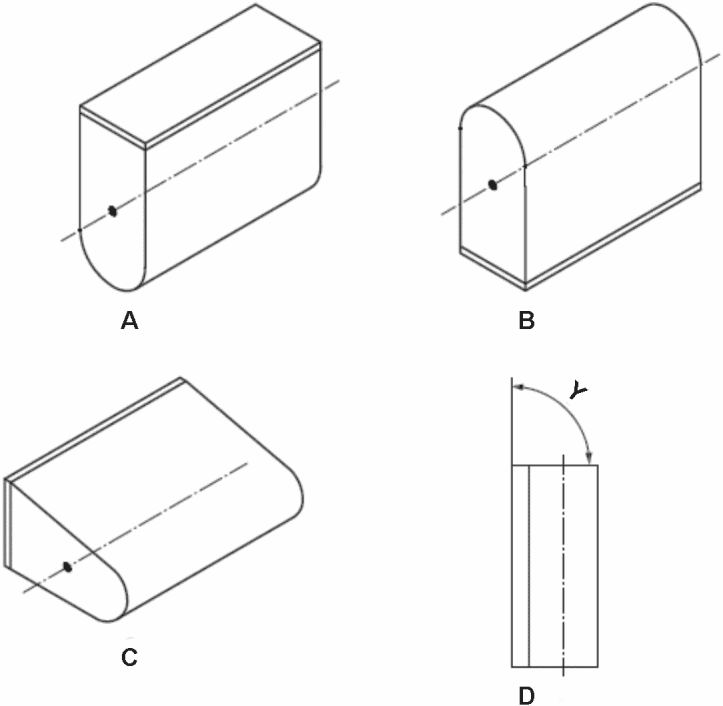
7.5.2.1 Если изготовитель указывает монтажное направление A или B, или A и B, как показано на рисунке 6, следующие испытания необходимо проводить только в направлении A или B.
7.5.2.2 Если изготовитель указывает монтажное направление C, как показано на рисунке 6, то должно быть выполнено следующее испытание.
a) Для кромок угол  , как показано на рисунке 2, должен измеряться датчиком в направлении B, при (20 +/- 5) °C и при верхнем пределе рабочей температуры. Назовем эти углы
, как показано на рисунке 2, должен измеряться датчиком в направлении B, при (20 +/- 5) °C и при верхнем пределе рабочей температуры. Назовем эти углы  и
и  .
.
b) Затем следует измерить угол  датчиком в монтажной ориентации C в верхней рабочей точке предела температуры. Назовем этот угол
датчиком в монтажной ориентации C в верхней рабочей точке предела температуры. Назовем этот угол  .
.
c) Если разница между  и
и  или
или  и
и  больше 4°, то должны быть проведены следующие испытания во всех указанных монтажных направлениях. В противном случае испытания необходимо проводить только в направлении B.
больше 4°, то должны быть проведены следующие испытания во всех указанных монтажных направлениях. В противном случае испытания необходимо проводить только в направлении B.
7.5.2.3 Если изготовитель указывает монтажное направление D, как показано на рисунке 6, то должно быть выполнено следующее испытание.
a) Угол  , как показано на рисунке 6, должен быть измерен датчиком в монтажном направлении B, на (20 +/- 5) °C и на верхнем пределе рабочей температуры. Назовем эти углы
, как показано на рисунке 6, должен быть измерен датчиком в монтажном направлении B, на (20 +/- 5) °C и на верхнем пределе рабочей температуры. Назовем эти углы  и
и  .
.
b) Затем следует измерить угол  датчиком в монтажном направлении D в верхней рабочей точке предела температуры. Назовем этот угол
датчиком в монтажном направлении D в верхней рабочей точке предела температуры. Назовем этот угол  .
.
c) Если разница между  и
и  или
или  и
и  превышает 4°, то должны быть проведены следующие испытания во всех указанных монтажных направлениях. В противном случае испытания необходимо проводить только в монтажном направлении B.
превышает 4°, то должны быть проведены следующие испытания во всех указанных монтажных направлениях. В противном случае испытания необходимо проводить только в монтажном направлении B.
7.5.3 Датчики штанг
Штанги должны быть испытаны в положении установки, для которого они предназначены.
7.6.1 Общие положения
Требования см. в 4.2.
Испытание проводят после достижения датчиком определенного температурного равновесия.
Испытуемый образец 3 должен применяться только к кромкам, если изготовитель указывает, что устройство подходит для обнаружения пальцев.
Активирующее усилие должно испытываться путем применения испытуемых образцов при испытательных скоростях и в местах, указанных на рисунке 7 и в таблице 5. Испытуемые образцы должны быть приложены перпендикулярно заданной оси и в направлении испытания, указанного на рисунке 7.
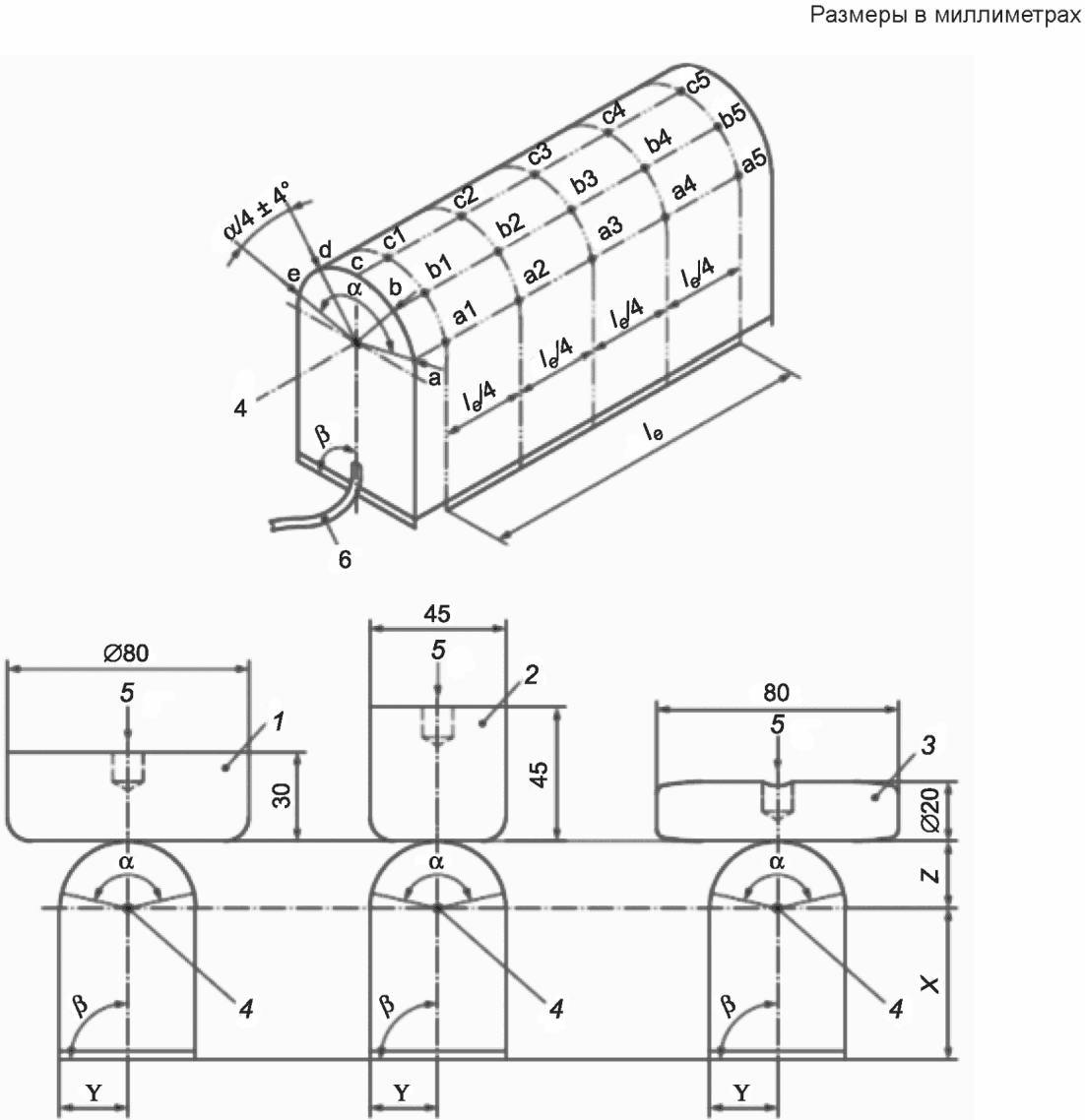
Условные обозначения:
1 - испытуемый образец 1; 2 - испытуемый образец 2;
3 - испытуемый образец 3; 4 - заданная ось; 5 - направление
испытания; 6 - соединительный кабель; le - эффективная
сенсорная длина
поверхности одиночного датчика
Таблица 5
поверхности для испытания N 3 для одиночного датчика
(см. 7.6.2)
N испытания | Испытуемый образец | Скорость испытания, мм·с-1 | Местоположение испытания |
1 | 10 | a1, a3, a5, c1, c3, c5, d1, d5, e3 и одно случайное местоположение | |
1 | Максимальная рабочая скорость | a1, a3, a5, c1, c3, c5, d1, d5, e3 и одно случайное местоположение | |
1 | 100 | Два места из испытания 3.2 с наивысшим активирующим усилием и одно случайное местоположение | |
3.4 | 2 | 10 | a3 и c3 |
3.5 | 2 | Максимальная рабочая скорость | a3 и c3 |
3.6 | 2 | 100 | c3 |
3 | 10 | a1, a3, a5, c1, c3, c5, d1, d5, e3 и одно случайное местоположение | |
3 | Максимальная рабочая скорость | a1, c1, c3, e5 и одно случайное местоположение | |
3 | 100 | Два места из испытания 3.8 с наивысшим активирующим усилием и одно случайное место | |
Для максимальной рабочей скорости < 150 мм·с-1 испытания при 100 мм·с-1 не проводят. Для максимальной рабочей скорости < 100 мм·с-1 испытания должны выполняться при 10 мм·с-1 и при максимальной рабочей скорости, указанной изготовителем. | |||
Для каждого применения испытуемого образца должно быть проверено, что устройство переключения выходного сигнала изменяет состояние при активирующем усилии, ниже или равном значению, указанному в таблице 2.
Если два или более датчиков могут быть объединены в одну эффективную сенсорную поверхность, испытания, указанные в 7.6.2, должны выполняться на одном датчике. Кроме того, испытуемые образцы должны применяться при испытательной скорости и испытательном местоположении, в соответствии с указанием в таблице 6. Испытуемые образцы должны быть приложены перпендикулярно к заданной оси и в направлениях испытаний, показанных на рисунке 8.
Таблица 6
поверхности для испытания N 3 для комбинации датчиков
(см. 7.6.3)
N испытания | Испытуемый образец | Скорость испытания, мм·с-1 | Местоположение испытания |
3.10 | 1 | 10 | a6 и c6 |
3.11 | 1 | Максимальная рабочая скорость | c6 и e6 |
3.12 | 1 | 100 | c6 |
3.13 | 2 | 10 | c6 |
3.14 | 2 | Максимальная рабочая скорость | a6 |
3.15 | 2 | 100 | c6 |
3.16 | 3 | 10 | c6 |
3.17 | 3 | Максимальная рабочая скорость | a6 |
3.18 | 3 | 100 | c6 |
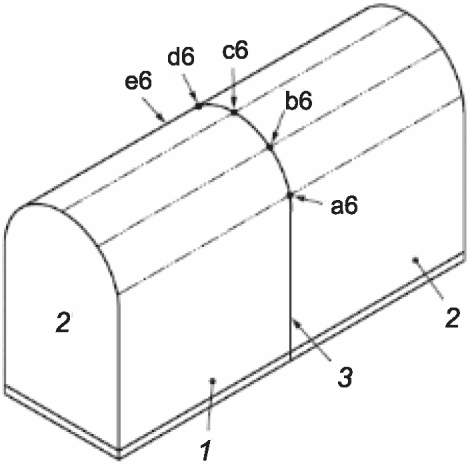
Условные обозначения:
1 - датчик 1; 2 - датчик 2; 3 - соединение
Примечание - Направления испытаний перпендикулярны поверхности.
на эффективной сенсорной поверхности комбинации датчиков
Для каждого применения испытуемого образца должно быть проверено, что устройство переключения выходного сигнала изменяет состояние при активирующем усилии, ниже или равном значению, указанному в таблице 2.
Активирующее усилие должно быть испытано путем приложения испытуемых образцов 1, 2 и 3 при испытательных скоростях и испытательных местоположениях, указанных в таблице 7 при нижнем пределе рабочей температуры, и в таблице 8 при верхнем пределе рабочей температуры. Испытуемый образец должен быть приложен перпендикулярно к заданной оси и в направлении испытаний, показанных на рисунке 7.
Таблица 7
пределе рабочей температуры для испытания N 3 (см. 7.6.4)
N испытания | Испытуемый образец | Скорость испытания, мм·с-1 | Местоположение испытания |
3.19 | 1 | 10 | Два места из испытания 3.1 с наивысшим активирующим усилием и одно случайное местоположение |
3.20 | 1 | Максимальная рабочая скорость | Два места из испытания 3.2 с наивысшим активирующим усилием и одно случайное местоположение |
3.21 | 1 | 100 | Одинаковое местоположение с испыт. 3.3 |
3.22 | 2 | 10 | c3 |
3.23 | 2 | Максимальная рабочая скорость | c3 |
3.24 | 2 | 100 | c3 |
3.25 | 3 | 10 | Два места из испытания 3.7 с наивысшим активирующим усилием и одно случайное местоположение |
3.26 | 3 | Максимальная рабочая скорость | Два места из испытания 3.8 с наивысшим активирующим усилием и одно случайное местоположение |
3.27 | 3 | 100 | Два места из испытания 3.9 с наивысшим активирующим усилием и одно случайное местоположение |
Таблица 8
пределе рабочей температуры для испытания N 3 (см. 7.6.4)
N испытания | Испытуемый образец | Скорость испытания, мм·с-1 | Местоположение испытания |
3.28 | 1 | 10 | Два места из испытания 3.1 с наивысшим активирующим усилием и одно случайное местоположение |
3.29 | 1 | Максимальная рабочая скорость | Два места из испытания 3.2 с наивысшим активирующим усилием и одно случайное местоположение |
3.30 | 1 | 100 | c3 |
3.31 | 2 | 10 | c3 |
3.32 | 2 | Максимальная рабочая скорость | c3 |
3.33 | 2 | 100 | c3 |
3.34 | 3 | 10 | c3 |
3.35 | 3 | Максимальная рабочая скорость | c3 |
3.36 | 3 | 100 | c3 |
Для каждого применения испытуемого образца должно быть проверено, что устройство переключения выходного сигнала изменяет состояние при активирующем усилии, ниже или равном значению, указанному в таблице 2.
Если два или более датчиков объединены в одну эффективную сенсорную поверхность, испытание, указанное в 7.6.4, должно выполняться на одном единственном датчике при верхнем и нижнем пределах рабочей температуры. Кроме того, испытательные образцы 1, 2 и 3 должны применяться при испытательных скоростях и местоположениях испытаний, как указано в таблице 9 и таблице 10. Испытуемые образцы должны быть приложены перпендикулярно к заданной оси и в направлении испытания, показанного на рисунке 8.
Таблица 9
пределе рабочей температуры для испытания N 3 (см. 7.6.5)
N испытания | Испытуемый образец | Скорость испытания, мм·с-1 | Местоположение испытания |
3.37 | 1 | 10 | a6 и c6 |
3.38 | 1 | Максимальная рабочая скорость | c6 и e6 |
3.39 | 1 | 100 | c6 |
3.40 | 2 | 10 | c6 |
3.41 | 2 | Максимальная рабочая скорость | a6 |
3.42 | 2 | 100 | c6 |
3.43 | 3 | 10 | c6 |
3.44 | 3 | Максимальная рабочая скорость | a6 |
3.45 | 3 | 100 | c6 |
Таблица 10
пределе рабочей температуры для испытания N 3 (см. 7.6.5)
N испытания | Испытуемый образец | Скорость испытания, мм·с-1 | Местоположение испытания |
3.46 | 1 | 10 | a6 и c6 |
3.47 | 1 | Максимальная рабочая скорость | c6 и e6 |
3.48 | 1 | 100 | c6 |
3.49 | 2 | 10 | c6 |
3.50 | 2 | Максимальная рабочая скорость | a6 |
3.51 | 2 | 100 | c6 |
3.52 | 3 | 10 | c6 |
3.53 | 3 | Максимальная рабочая скорость | a6 |
3.54 | 3 | 100 | c6 |
Для каждого применения испытуемого образца должно быть проверено, что устройство переключения выходного сигнала изменяет состояние при активирующем усилии, ниже или равном значению, указанному в таблице 2.
Требования см. в 4.6.
Взаимосвязь усилие-перемещение должна быть подтверждена в соответствии с рисунком 4 путем применения испытуемого образца 1 (см. рисунок 7) к датчику на максимальной рабочей скорости до точки A. Усилие реакции датчика и расстояние, пройденное испытуемым образцом, должны непрерывно измеряться от точки, где испытуемый образец касается эффективной сенсорной поверхности до тех пор, пока не будет достигнуто активирующее усилие. Точки B1, B2 и C должны быть подтверждены в соответствии с рисунком 4 путем прикладывания испытуемого образца 1 к датчику со скоростью <= 10 мм·с-1. Затем можно показать соотношение усилия и перемещения, соединив точки A, B1, B2 с точкой C прямыми линиями. Настоящее испытание проводят в месте проведения испытания c3 при температуре 20 °C.
Требования см. в 4.3.
Предварительный ход должен быть измерен. Настоящее расстояние должно быть равно или меньше указанного изготовителем.
Требования см. в 4.4.
Рабочий ход измеряют при усилии 250 Н и 400 Н.
Настоящие расстояния должны быть больше или равны указанным изготовителем.
Требования см. в 4.5.
Перебег измеряют при усилии 250 Н и 400 Н.
Настоящие расстояния должны быть больше или равны указанным изготовителем.
Требования см. в 4.8.
7.8.1 Одиночный датчик в монтажном направлении B, подключенный к устройству переключения выходного сигнала через блок управления, должен быть испытан путем применения образца 1 (см. рисунок 5) на максимальной рабочей скорости. Испытательная скорость должна быть постоянной в течение не менее 80% рабочего хода B1 (см. рисунок 4).
Рабочая сенсорная поверхность датчика должна перемещаться или деформироваться до рабочего хода B1 (см. рисунок 4) 10 000 раз в испытательной точке c2 (см. рисунок 7).
Скорость обратного хода испытательного образца должна быть равна максимальной скорости испытания +/- 20%.
В каждом испытательном цикле образец не должен касаться эффективной сенсорной поверхности в течение  .
.
7.8.2 Если два или более датчиков объединены в одну эффективную чувствительную поверхность, испытания, указанные в 7.8.1, должны выполняться на одном датчике.
Кроме того, образец 1 должен быть приложен 1000 раз в месте c6, как показано на рисунке 8, в тех же условиях, указанных в 7.8.1.
7.8.3 После завершения испытания, указанного в 7.8.1 или 7.8.2, испытуемый датчик(и) не должен иметь дефекты, влияющие на характеристики безопасности и требования к активирующему усилию (см. 4.2), предварительное перемещение (см. 4.3) и перебег (см. 4.5) должны соблюдаться. Это должно быть испытано с использованием только испытуемого образца 1 при максимальной рабочей скорости и при скорости 10 мм·с-1 в точках c2 (см. рисунок 7) для отдельных датчиков и c2 и c6 для комбинации датчиков.
Статическое усилие  следует прикладывать в случайном месте на эффективной сенсорной поверхности в контрольном направлении через образец 1 в течение 10 мин. Испытуемый образец прикладывают со скоростью 10 мм·с-1. При приложении настоящего усилия значение выходного сигнала датчика и устройства переключения выходного сигнала должно переходить и поддерживаться в выключенном состоянии в соответствии с рисунками A.1, A.2, A.3 и A.4. Когда усилие снято, значение выходного сигнала датчика и состояние устройства переключения выходного сигнала должно изменяться в соответствии с рисунками A.1, A.2, A.3 и A.4.
следует прикладывать в случайном месте на эффективной сенсорной поверхности в контрольном направлении через образец 1 в течение 10 мин. Испытуемый образец прикладывают со скоростью 10 мм·с-1. При приложении настоящего усилия значение выходного сигнала датчика и устройства переключения выходного сигнала должно переходить и поддерживаться в выключенном состоянии в соответствии с рисунками A.1, A.2, A.3 и A.4. Когда усилие снято, значение выходного сигнала датчика и состояние устройства переключения выходного сигнала должно изменяться в соответствии с рисунками A.1, A.2, A.3 и A.4.
следует прикладывать в случайном месте на эффективной сенсорной поверхности в контрольном направлении через образец 1 в течение 10 мин. Испытуемый образец прикладывают со скоростью 10 мм·с-1. При приложении настоящего усилия значение выходного сигнала датчика и устройства переключения выходного сигнала должно переходить и поддерживаться в выключенном состоянии в соответствии с рисунками A.1, A.2, A.3 и A.4. Когда усилие снято, значение выходного сигнала датчика и состояние устройства переключения выходного сигнала должно изменяться в соответствии с рисунками A.1, A.2, A.3 и A.4.7.10 Испытание N 7. Реакция устройства переключения выходного сигнала на активирующее усилие, сброс и состояние электропитания
Взаимодействие отдельных функций, как показано в приложении A, должно быть проверено с использованием образца 1 и активирующим усилием  , приложенным при (10 +/- 1) мм·с-1 в заданном направлении к эффективному измерению поверхности в одном случайном местоположении.
, приложенным при (10 +/- 1) мм·с-1 в заданном направлении к эффективному измерению поверхности в одном случайном местоположении.
, приложенным при (10 +/- 1) мм·с-1 в заданном направлении к эффективному измерению поверхности в одном случайном местоположении.Требования см. в 4.12.
В конце каждого испытания, указанного в 7.11.2 - 7.11.5, нормальная функция кромки или штанги должна быть проверена с использованием образца 1, приложенного перпендикулярно к эффективной сенсорной поверхности с соответствующим активирующим усилием, указанным в таблице 2, при максимальной рабочей скорости в одном случайном местоположении. Настоящее требование выполнено, если производится состояние "ВЫКЛ" устройства переключения выходного сигнала.
Требования см. в 4.12.2.
Требования к установленному диапазону рабочих температур должны быть проверены с помощью методики испытаний, приведенной в таблице 11.
Таблица 11
Методика испытаний | Условия испытаний |
IEC 60068-2-14 Испытание Nb | Кромка и штанга подключены к электропитанию |
Скорость изменения температуры должна составлять (0,8 +/- 0,3) °C·мин-1 во всем диапазоне температур для нагревания и охлаждения.
С интервалом в одну минуту во время настоящей методики испытания функция кромки или штанга должна быть проверена с использованием испытуемого образца 1 с соответствующим активирующим усилием, приведенным в таблице 2. Испытуемый образец должен быть приложен перпендикулярно к эффективной сенсорной поверхности на (10 +/- 1) мм·с-1 в одном случайном местоположении. Применение испытуемого образца должно привести к выключенному состоянию устройства переключения выходного сигнала.
Требования см. в 4.12.2.
Требования к влажности должны быть проверены по методике испытаний, приведенной в таблице 12.
Таблица 12
Методика испытаний | Условия испытаний |
IEC 60068-2-78, температура испытательной камеры (40 +/- 2) °C относительная влажность (93 +/- 3)% | Кромка или штанга не подключены к электропитанию. После настоящего испытания необходимо провести испытание на пробой (высоковольтное) по IEC 60664-1:2007, таблицы F.1 и F.5, между цепями и доступными прикосновению токоведущими частями или доступными поверхностями блока управления/устройства переключения выходного сигнала |
Требования см. в 4.12.3.
Требования безопасности должны быть проверены только в соответствии с IEC 61000-6, 2.
Помехоустойчивость должна быть проверена для следующих состояний в соответствии с методиками испытаний с указанными характеристическими значениями, приведенными в таблице 13, и при указанных условиях, приведенных в 7.11.1:
- кромки и штанги с подводом энергии;
- кромки и штанги с подводом энергии с приложенным активирующим усилием;
- кромки и штанги с энергией подачи, после удаления;
- активирующего усилия и до выполнения сброса.
Таблица 13
Испытания и характеристические значения | Методика испытаний |
Выброс, класс монтажа 3 | IEC 61000-4-5 электроэнергия, заземление и каналы ввода/вывода |
Быстрые электрические переходные процессы (всплески), уровень 3 | IEC 61000-4-4 период испытания: 2 мин электроэнергия, заземление и каналы ввода/вывода |
Электростатический разряд, уровень 3 | IEC 61000-4-2 |
Излучаемое радиочастотное электромагнитное поле, уровень 3 | IEC 61000-4-3 |
Кондуктивные помехи под действием радиочастотных полей, уровень 3 | IEC 61000-4-6 |
Требования см. в 4.12.4.
Настоящие требования должны быть проверены в соответствии с таблицей 14. Во время настоящего испытания должно быть проверено, что устройство переключения выходного сигнала остается во включенном состоянии. После завершения вибрационных испытаний должна быть проверена нормальная функция кромки или штанги.
Таблица 14
Методика испытания | Условия испытаний |
IEC 60068-2-6 | Кромка или штанга подключены к электроэнергии. Датчик должен испытываться в направлении монтажа B, блок управления и устройство переключения выходного сигнала должны испытываться в трех осях, перпендикулярных друг другу |
Требования только к штанге, см. в 4.12.5.
Во время настоящего испытания должно быть проверено, что устройство переключения выходного сигнала остается во включенном состоянии. После выполнения испытания на удар необходимо проверить нормальное функционирование штанги.
Настоящие требования должны быть проверены в соответствии с таблицей 15.
Таблица 15
Методика испытания | Условия испытаний |
IEC 60068-2-27 | Штанга подключена к электропитанию. Датчик должен быть испытан только в заданном направлении и в противоположном направлении |
После завершения испытания штанга должна быть проверена на наличие механических повреждений, незакрепленных деталей и т.д.
7.12.1 Общие положения
Требования см. в 4.13.
Требования см. в 4.13.1.
Нормальная работа кромки или штанги должна быть проверена в соответствии с IEC 60204-1:2005, 4.3. Функционирование должно быть проверено с использованием испытуемого образца 1, применяемого к эффективной сенсорной поверхности с соответствующим активирующим усилием, указанным в таблице 2, в заданном направлении и на максимальной рабочей скорости в одном случайном местоположении. Каждое требование выполнено, если произведено состояние "ВЫКЛ" устройства переключения выходного сигнала.
Требования см. в 4.13.2.
Нормальное функционирование кромки или штанги должно быть проверено на пределы изменения электроэнергии, установленные изготовителем. Возможные изменения электроэнергии за пределами указанного диапазона не должны приводить к опасному выходу из строя кромки или штанги.
Требования см. в 4.14.
С помощью анализа и осмотра и, при необходимости, испытаний должно быть проверено, что требования 4.14 соблюдены.
Требования см. в 4.15.
С помощью анализа и осмотра и, при необходимости, испытаний должно быть проверено соблюдение требований ISO 4413 и ISO 13849-2.
Требования см. в 4.16.
С помощью анализа и осмотра и, при необходимости, испытаний должно быть проверено соблюдение требований ISO 4414 и ISO 13849-2.
Требования см. в 4.17.
Должно быть подтверждено анализом и, при необходимости, испытанием выполнение требований IEC 60529.
Требования см. в 4.18.
Если изготовителем указаны дополнительные покрытия, то должно быть проверено, что требование 4.18 выполняется.
Требование 4.19 должно быть проверено визуально внешним осмотром.
7.17.1 Общие положения
Требования см. в 4.20.
Предусмотренные функции и категории безопасности должны быть подтверждены анализом в соответствии с ISO 13849-2 и фактически достигнутый уровень PL сравнивают с заданным.
7.17.2 Значение B10d для датчика
При проведении испытания должны соблюдаться следующие условия:
a) длина испытуемого образца: не менее 500 мм;
b) усилие, приложенное к испытуемому образцу: N 1 по рисунку 5;
c) скорость испытания: свободно выбирается;
d) рабочий ход: до изменения состояния датчика;
e) точки измерения: одна от C1 до C5 или более свободно выбираемых точек от C1 до C5;
f) минимальное количество операций: 10 000 (на место испытания в произвольно выбранных точках).
Требования 4.21 должны быть проверены визуально внешним осмотром и, при необходимости, испытанием.
Требования см. в 4.22.
Усилие (500 +/- 25) Н должно быть приложено к эффективной сенсорной поверхности датчика кромки через испытуемый образец 1 (см. рисунок 5) в местоположении a3 (см. рисунок 7) в течение 1 ч на верхних и нижних пределах рабочей температуры. Это не должно привести к необратимому повреждению.
Для штанг испытание проводят с приложением максимального усилия, заявленного изготовителем через образец 1 (см. рисунок 5) в течение 1 ч в наиболее критическом направлении и местоположении. Необратимого повреждения не должно быть.
Требования см. в 4.23.
Статическая сила (250 +/- 25) Н должна быть приложена в заданном направлении к эффективной сенсорной поверхности датчика кромки или штанги через образец 1 (см. рисунок 5) на испытуемое местоположение c3. Через 24 ч усилие должно быть снято. Деформацию эффективной сенсорной поверхности на образце необходимо измерять через 30 с, 5 мин и 30 мин после прекращения действия усилия. Глубина деформации, измеренной в заданном направлении от линии вдоль местоположения с (см. рисунок 7) до деформированной верхней поверхности, не должна превышать значений, указанных в таблице 3.
Настоящие испытания должны проводиться в пределах диапазона рабочих температур.
Статическое усилие (250 +/- 25) Н должно быть приложено в исходном направлении к эффективной сенсорной поверхности датчика кромки или штанги через образец 1 (см. рисунок 5) в испытуемом местоположении c3. Через 24 ч усилие должно быть снято. В течение 30 с (и после срабатывания сброса, если применимо) устройство переключения выходного сигнала должно перейти во включенное состояние и прикладывание испытуемого образца 1 снова в местоположение c3 должно перевести устройство переключения выходного сигнала в выключенное состояние.
Настоящее испытание проводят в пределах диапазона рабочих температур.
Требования, приведенные в 4.24, должны быть проверены визуально внешним осмотром.
Требование, приведенное в 4.25, должно быть проверено визуально внешним осмотром.
Требования, приведенные в 4.26, должны быть проверены визуально внешним осмотром.
Требование, приведенное в 4.27, должно быть проверено визуально внешним осмотром и функциональными испытаниями простыми средствами.
Пример - Вставив проволоку, булавку, клейкую ленту, клин или магнит.
Требования, приведенные в разделе 5, должны быть проверены визуально внешним осмотром.
Требования, приведенные в разделе 6, должны быть проверены визуально внешним осмотром.
(обязательное)
С ФУНКЦИЕЙ СБРОСА И БЕЗ НЕЕ
На рисунках с A.1 по A.4 показана взаимосвязь между активирующим усилием, сигналом сброса и выходом датчика, и устройством переключения выходного сигнала (см. 4.10).
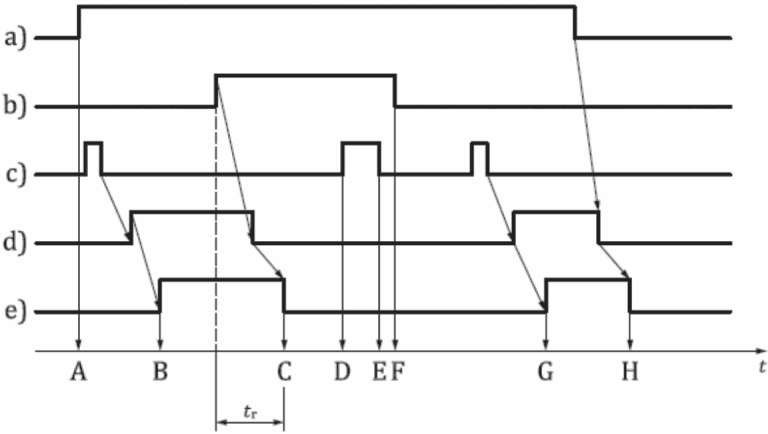
Условные обозначения:
t - время; tr - время отклика; a) - электроэнергия
для кромки/штанги; b) - активирующее усилие; c) сигнал
сброса; d) - выход датчика; e) - выход устройства
переключения выходного сигнала
A - электропитание на кромку или штангу "ВКЛ": выход устройства переключения выходного сигнала остается в выключенном состоянии, поскольку кромка или штанга не сбрасываются; выход датчика включен, когда электропитание включено;
B - сброс получен без активирующего усилия на датчик: выход устройства переключения выходного сигнала переходит в замкнутое состояние "ВКЛ", из-за срабатывания кнопки сброса, в то время как выход датчик включен;
C - активирующее усилие на датчик; выход датчика выключен - также переводит в разомкнутое состояние "ВЫКЛ" выход устройства переключения выходного сигнала;
D - начальная точка сигнала сброса: действие кнопки сброса не влияет на выход устройства переключения выходного сигнала, поскольку сигнал еще не завершен, а активирующее усилие все еще присутствует;
E - присутствовал сигнал сброса: прекращение сигнала сброса не влияет на выход устройства переключения выходного сигнала до тех пор, пока усилие присутствует на датчике; выход устройства переключения выходного сигнала остается в разомкнутом состоянии "ВЫКЛ";
F - активирующее усилие снято с датчика: выход устройства переключения выходного сигнала остается в разомкнутом состоянии "ВЫКЛ", т.к. сброс не применяется;
G - сброс достигнут: выход устройства переключения выходного сигнала переходит в замкнутое состояние "ВКЛ", поскольку выход датчика включен из-за срабатывания кнопки сброса без приложения активирующего усилия к датчику;
H - подача питания на кромку или штангу переходит в разомкнутое состояние "ВЫКЛ": выход устройства переключения выходного сигнала переходит в состояние "ВЫКЛ", поскольку выход датчика выключен
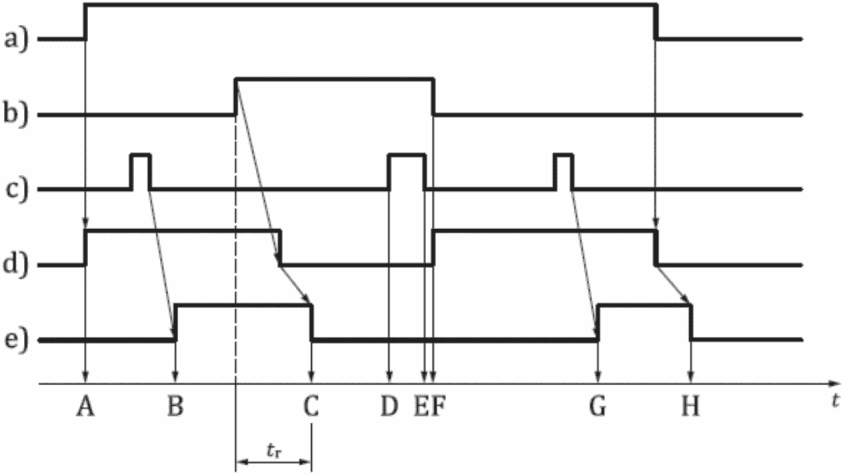
Условные обозначения:
t - время; tr - время отклика; a) - питание кромки/штанги;
b) - активирующее усилие; c) - сигнал сброса; d) - выход
датчика; e) - выход устройства (устройств) переключения
выходного сигнала
A - подача питания на кромку или штангу включена: выход устройства переключения выходного сигнала остается в выключенном состоянии, поскольку кромка или штанга не сбрасываются; выход датчика включается, когда питание включено;
B - сброс достигается без приложения активирующего усилия к датчику: выход устройства переключения выходного сигнала переходит в замкнутое состояние "ВКЛ" вследствие срабатывания кнопки сброса при включенном выходе датчика;
C - активирующее усилие на датчик: выход датчика отключен, также выход устройства переключения выходного сигнала переходит в выключенное состояние;
D - начальная точка сигнала сброса: действие кнопки сброса не влияет на выход устройства переключения выходного сигнала, поскольку сигнал еще не завершен, а активирующее усилие все еще присутствует;
E - присутствовал сигнал сброса: прекращение сигнала сброса не влияет на выход устройства переключения выходного сигнала до тех пор, пока усилие присутствует на датчике; выход устройства переключения выходного сигнала остается в разомкнутом состоянии "ВЫКЛ";
F - активирующее усилие снято с датчика: выход датчика включается, но выход устройства переключения выходного сигнала остается в разомкнутом состоянии "ВЫКЛ", поскольку сброс не применяется после снятия усилия;
G - сброс достигается без приложения активирующего усилия к датчику: выход устройства переключения выходного сигнала переходит в замкнутое состояние "ВКЛ" из-за нажатия кнопки сброса при включенном выходе датчика;
H - подача питания на кромку или штангу "ВЫКЛ": выход устройства переключения выходного сигнала переходит в разомкнутое состояние "ВЫКЛ", поскольку выход датчика отключен
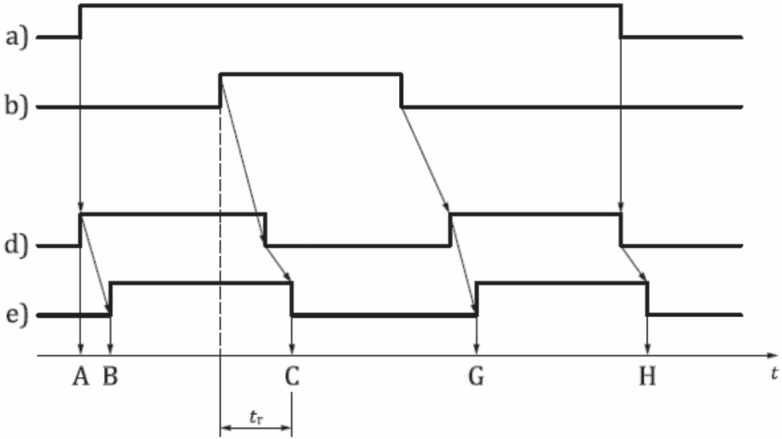
Условные обозначения:
t - время; tr - время отклика; a) - электропитание
кромки/штанги; b) - активирующее усилие; d) - выход датчика;
e) - выход устройства (устройств) переключения
выходного сигнала
A - включение питания кромки или штанги: выход датчика включается при включении питания;
B - выход устройства переключения выходного сигнала переходит в замкнутое состояние "ВКЛ", поскольку на датчик не действует активирующее усилие;
C - активирующее усилие на датчик: выход датчика отключается, переключая выход устройства переключения выходного сигнала в положение "ВЫКЛ";
G - выход устройства переключения выходного сигнала переходит в состояние "ВКЛ", так как выход датчика включается из-за снятия активирующего усилия с датчика;
H - подача питания на кромку или штангу "ВЫКЛ": выход устройства переключения выходного сигнала переходит в состояние "ВЫКЛ", поскольку выход датчика выключен
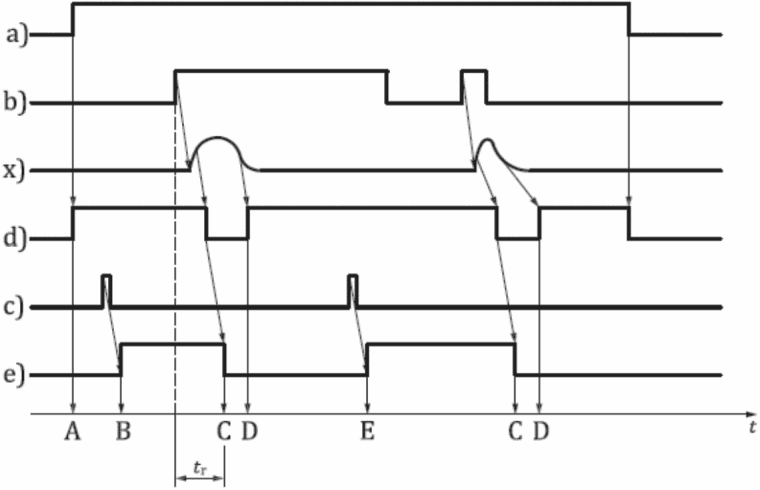
Условные обозначения:
t - время; tr - время отклика; a) - электропитание
кромки/штанги; b) - активирующее усилие; x) - импульс
давления в датчике; d) - электрический выход датчика
(воздушно-импульсный переключатель); c) - сигнал сброса;
e) - выход устройства переключения выходного сигнала;
A - подача питания на кромку или штангу включено ("ВКЛ");
B - сигнал сброса присутствует: выход устройства
переключения выходного сигнала переходит в состояние "ВКЛ";
C - активирующее усилие на датчик: выход датчика выключен,
выход устройства переключения выходного сигнала переключен
в состояние "ВЫКЛ"; D - выход датчика переходит в состояние
"ВКЛ" из-за падения давления в датчике; E - присутствует
сигнал сброса: выход устройства переключения выходного
сигнала переключается в состояние "ВКЛ", хотя активирующее
усилие все еще применяется - может привести
к опасной ситуации
Необходимо, чтобы система управления машиной имела собственную систему безопасности, гарантирующую недопущение случаев опасного перезапуска. Например, на дверях с электроприводом это может быть автоматический или ручной возврат в исходное положение (сброс). Правильное функционирование таких средств управления должно быть описано в соответствующих стандартах типа C.
Как показано, настоящая система не имеет средств проверки работы датчика в ответ на импульс давления. На дверях, чтобы соответствовать категории 2, должна быть функция системы управления дверью.
Примечания
1 Точка, в которой появляется D, будет зависеть от ряда факторов, например, от уровня применяемого усилия и контролируемой скорости утечки воздуха из системы.
2 Считается, что системы импульса давления не отвечают требованиям категории 1 согласно ISO 13849-1. См. D.3.5 для получения дополнительной информации об импульсных системах.
датчика не остается в выключенном состоянии, когда
активирующее усилие все еще приложено (например, системы
воздушного импульса)
(справочное)
ПОЯСНИТЕЛЬНЫЕ ПРИМЕЧАНИЯ И РЕКОМЕНДАЦИИ
См. рисунок B.1, где показана зависимость перемещения от усилия для кромок.
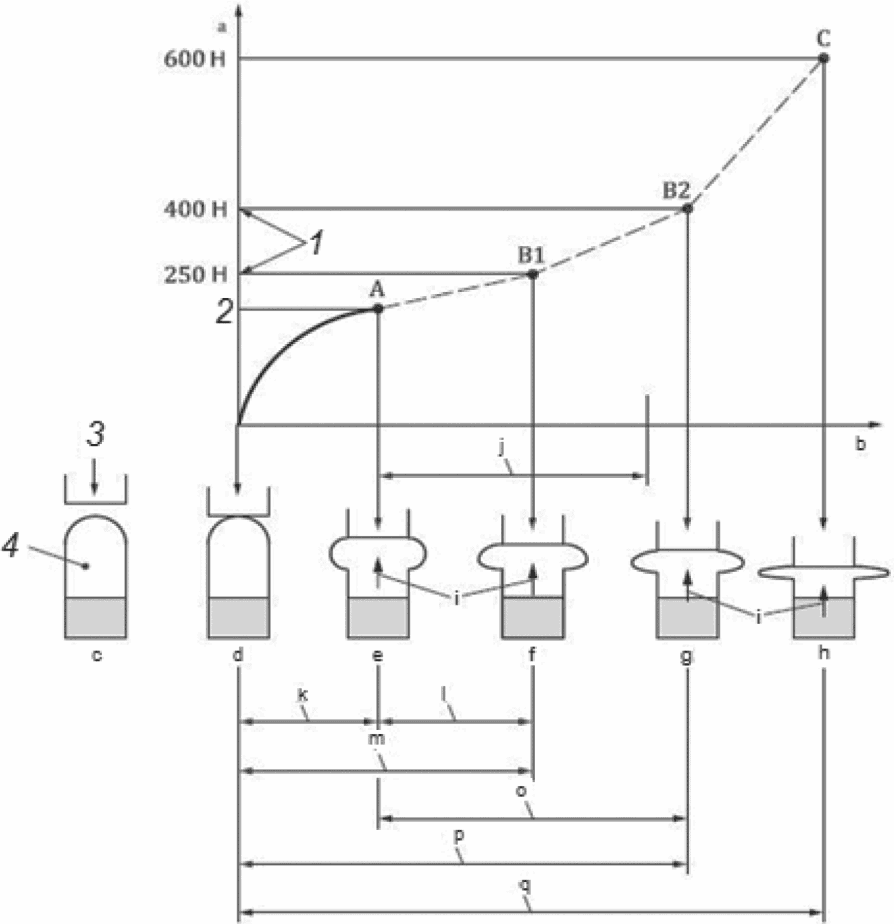
Условные обозначения:
1 - заданные усилия; 2 - самое низкое усилие; 3 - опасная
скорость; 4 - датчик; a - усилие в ньютонах (Н); b - ход
в миллиметрах (мм); c - датчик до контакта; d - точка
контакта; e - точка активации (срабатывания); f - деформация
в точке B1; g - деформация в точке B2; h - деформация
при усилии 600 Н; i - усилие реакции; j - установленный ход
останова машины; k - предварительный ход; l - перебег B1;
m - рабочий ход B1; o - перебег B2; p - рабочий ход B2;
q - полный ход
Примечание - Усилия относятся к испытуемому образцу 1 на рисунке 5 и являются только примерами.
Предварительный ход: усилие увеличивается от точки контакта с препятствием. В заданный момент датчик сигнализирует блоку управления о переходе в состояние "ВЫКЛ". Затем сигнал отправляется в систему управления машиной для прекращения опасного движения. Расстояние, пройденное между этими двумя точками, называется предварительным ходом. Это расстояние может изменяться в зависимости от скорости приближения и условий окружающей среды.
Перебег и общий ход: перебег - это расстояние, на котором скорость уменьшается, а применяемое усилие увеличивается. Максимально допустимое усилие, указанное поставщиком и выбранное пользователем для приложения должно быть меньше заданного усилия в соответствии со стандартом типа C или оценкой риска и должно происходить в пределах перебега.
Превышение максимально допустимого усилия может быть вызвано рядом факторов, в том числе:
- износ тормозов (старение),
- увеличенное время отклика,
- механический износ,
- повышенная опасная скорость.
Любой из указанных факторов может привести к травме из-за чрезмерного усилия, действующего на соответствующую часть тела, когда дальнейшая деформация датчика невозможна.
Ход останова - это расстояние, которое проходит движущаяся часть машины, представляющая опасность между точкой, в которой датчик посылает сигнал на свой блок управления, и точкой, в которой машина останавливается. Ход останова машины должен находиться в пределах перебега кромки или штанги.
Общий ход - это максимально возможное перемещение или деформация датчика вследствие приложенного усилия, например, 600 Н.
Рабочий ход и усилие: усилие в 250 Н или 400 Н, перпендикулярное заданной оси, используется в качестве эталона для измерения рабочего хода кромки или штанги с испытуемым образцом 1 (см. рисунок 5). В соответствии с 4.6, изготовитель должен предоставить данные о взаимосвязи усилие-перемещение, по крайней мере, до заданного усилия. Однако 250 Н или 400 Н не следует рассматривать как усилия, которые не вызывают травм во всех приложениях.
Во всех случаях усилие воздействия на человека должно быть сведено к минимуму. На максимально допустимое усилие может влиять, например, продолжительность приложения усилия, размеры датчика, материал датчика и защищаемые части тела. Особое внимание следует уделить тем применениям, где дети или пожилые люди должны быть защищены.
Важно, чтобы торможение или обратный ход движущихся частей были такими, чтобы усилие реакции активированного датчика не превышало максимально допустимое усилие, указанное изготовителем для конкретного приложения.
(справочное)
ДЛЯ ИЗГОТОВИТЕЛЯ/ПОЛЬЗОВАТЕЛЯ ОБОРУДОВАНИЯ
C.1 Общие положения
Датчик чаще всего монтируется на движущейся поверхности, что может привести к захвату, сдавливанию или опасности столкновения, например, двери с механическим приводом. Крайне важно, чтобы изготовитель/пользователь оборудования убедились, что торможение или обратный ход движущихся частей таковы, что усилие реакции сжатого датчика не превышает максимально допустимую силу, указанную для конкретного применения. См. приложение B и C.2.2 c).
C.2 Выбор подходящей кромки или штанги
C.2.1 Общие положения
Ниже приведены четыре наиболее важных фактора, влияющих на выбор подходящей кромки или штанги для конкретного применения.
a) Категория и уровень эффективности по ISO 13849-1 в соответствии с требованиями применения
Они основаны на следующем:
- оценке риска для конкретного применения и требованиях, приведенных в 4.20;
- требованиях соответствующего стандарта типа C.
b) Опасная скорость
Это скорость, с которой движется опасная поверхность. Обычно одна поверхность движется, а другая неподвижна. Максимально возможная скорость должна рассматриваться как опасная скорость. Если обе поверхности движутся, требуется особое внимание.
c) Останов хода опасных частей
Расстояние, пройденное опасными поверхностями после подачи стоп-сигнала устройством переключения выходного сигнала в систему управления машины. Ход зависит от опасной скорости, времени отклика системы управления машиной и эффективности системы торможения машины. Ход может быть рассчитан и/или измерен. При необходимости, подходящий коэффициент безопасности следует использовать для учета износа тормозов, допусков измерений и т.д.
В приложениях, где время между последовательными активациями датчика менее 30 с (см. 4.23), следует выбрать датчик, который будет достаточно восстанавливаться для нормальной работы в течение доступного времени.
C.2.2 Методика выбора
После определения категории и уровня эффективности в соответствии с ISO 13849-1 процедура выглядит следующим образом.
a) Определение требуемой рабочей скорости и максимальной опасной скорости
Если максимальная опасная скорость не указана, ее следует измерить или рассчитать. Точка в ходе, в которой возникает максимальная скорость, будет зависеть от приводного механизма.
Максимальная рабочая скорость устройства должна быть выше максимальной опасной скорости.
b) Определение требуемого минимального расстояния перебега
Определить ход останова опасных частей. Если это не указано, необходимо измерить и/или рассчитать. Путь останова, умноженный на подходящий коэффициент безопасности не менее 1,2, дает требуемый минимальный перебег для применения. При наличии других факторов, таких как система торможения, которая подвержена износу, следует использовать более высокий коэффициент безопасности. См. рисунок B.1.
Простым способом измерения тормозного пути является временное определение положения в точке близко к тому месту, где возникает максимальная опасная скорость. Как правило, замкнутые контакты выявленного положения должны быть подключены к цепи останова управления машиной в точке, в которой будут подключены устройства переключения выходного сигнала. Машину следует запускать несколько раз в наихудших ожидаемых условиях и измерить расстояние, пройденное кроме действующей точки выявления положения. Максимальное измеренное расстояние следует рассматривать как расстояние останова.
Если доступно, максимально допустимое усилие должно учитываться из стандарта типа C для конкретной машины или в соответствии с оценкой риска. Оценка риска должна учитывать части тела и типы лиц, подлежащих защите, например, детей или пожилых людей. Скорость, форма и материал датчика, а также максимальное давление, оказываемое датчиком, также следует учитывать. Максимально допустимое усилие должно быть по возможности меньше.
d) Выбор устройства
Используя данные соотношения усилие/расстояние или диаграммы, предоставленные изготовителем, следует выбрать защитные меры (предохранитель) с требуемой максимальной рабочей скоростью, которая обеспечивает минимальное расстояние перебега перед достижением максимально допустимого усилия.
Если не удается найти кромку или штангу с достаточным перебегом, тогда может возникнуть необходимость улучшить тормозную способность машины.
(справочное)
D.1 Замечания по применению
В настоящем приложении приведены некоторые рекомендации по расчету кромок и штанг. Однако игнорирование настоящего руководства по расчету не обязательно означает, что продукт в конечном итоге будет небезопасен.
D.2 Общие положения
D.2.1 Частота работы
Кромки и штанги часто используются в применениях, где они не активируются в течение многих месяцев. При активации они должны работать безопасно.
И наоборот, некоторые кромки и штанги используются в применениях, где они часто активируются. Иногда это может привести к изменению чувствительности с течением времени.
D.2.2 Компоненты
Компоненты кромок и штанг должны быть полностью защищены от предвидимых повреждений, например, защитными чехлами.
D.2.3 Воздействие жидкости
Если компоненты могут контактировать с такими жидкостями, как масла, химикаты или вода, датчик должен быть изготовлен из подходящих материалов, которые не деградируют и не набухают.
D.3.1 Материал профиля
Материал профиля датчика должен выдерживать режим эксплуатации и условия окружающей среды.
D.3.2 Чувствительность датчика
Датчики могут иметь определенные части сенсорной поверхности, которые менее чувствительны, чем другие, и также части, которые могут быть легче повреждены, чем другие. Чувствительность может быть снижена вблизи точки соединения с входными кабелями, трубками, волокнами или проводами, а также в точках, где контактные элементы раздвинуты.
D.3.3 Физическое воздействие (эффекты)
Попадание материала (в виде мелких или крупных частиц), паразитов или жидкости, которые могут находиться в зоне, в которой будет использоваться кромка, может привести к коррозии датчика или потере его чувствительности.
Возможно, что очень малое отверстие на поверхности кромки не может быть обнаружено при регулярном осмотре. Однако, оно может быть достаточно большим, чтобы позволить жидкости проникнуть внутрь и образовывать барьер, препятствующий активации датчика. И наоборот, желательно убедиться, что жидкости могут вытекать из профиля, оставив концы открытыми, либо используя пористую торцевую заглушку.
D.3.4 Кромки с электрическими датчиками
В некоторых конструкциях используются электрические контактные элементы. Элементы обычно разделены воздушным зазором, который закрывается при применении давления к поверхности. Воздушный зазор можно поддерживать, например, при помощи пружин, изолирующих прокладок или упругого пеноматериала. Следует учитывать последствия отказа этих компонентов. Например, поломка не должна быть результатом отрыва и перемещения деталей внутри кромки, что ухудшает чувствительность или препятствует работе.
Следует также учитывать способ электрического подключения к датчику. Соединения должны иметь максимальную целостность. При использовании двух вводов и двух выводов их следует подсоединять к противоположным концам контактного элемента для обеспечения целостности через контактные элементы. Если выводы подключены и есть разомкнутая цепь соединения с контактным элементом, может возникнуть небезопасная ситуация.
Разрывы/проколы, такие как разрыв или отверстие в датчике импульса давления или его соединительных элементах, могут привести к мгновенной потере функции безопасности. В этом случае система управления должна обнаружить разрыв/прокол и поддерживать устройство переключения выходного сигнала в выключенном состоянии, во время существования разрыва/прокола. Устройство переключения выходного сигнала должно оставаться в выключенном состоянии до сброса вручную уполномоченным персоналом.
В некоторых датчиках импульса давления деформация профиля датчика вызывает повышение давления, которое передается по трубке к реле давления воздуха. Если в системе нет постоянно поддерживаемого давления воздуха, могут возникнуть следующие неисправности:
- невозможно обнаружить такие повреждения, как порезы или остаточная деформация профиля;
- соединительная трубка может быть незаметно перерезана, отсоединена или перекручена;
- реле давления воздуха не может сработать при деформации датчика на малой скорости приближения;
- время реакции может быть увеличено, если между датчиком и реле давления воздуха используется длинная соединительная трубка;
- большинство реле давления воздуха имеют "сброс" (стравливание) воздуха для компенсации меняющихся условий окружающей среды, и если этот "сброс" воздуха будет заблокирован, кромка может не сработать;
- настройка сброса воздуха будет зависеть от поперечного сечения профиля датчика, длины датчика, материала датчика и температурного диапазона применения, см. 4.21 (регулировки), а при слишком большом "стравливании" воздуха чувствительность прибора будет снижена;
- если датчик сжат так, что большая часть внутреннего воздуха вытесняется, частичный вакуум будет создаваться при отпускании датчика, что может сильно снизить чувствительность датчика или предотвратить его немедленное повторное срабатывание.
Систему импульса давления можно спроектировать в соответствии с категорией 2 ISO 13849-1, проверив функцию кромки на каждом цикле машины.
D.3.6 Кромки с оптоволоконными датчиками
Как правило, они работают при уменьшении света, проходящего через оптическое волокно. Следует учитывать долговременные изменения, которые могут произойти в излучателях и детекторах света, а также в оптическом волокне. Средства, с помощью которых механическая сила преобразуется в оптическое изменение, должны быть стабильными. Не допускается возможность улавливания света от излучателя детектором, не проходя через оптическое волокно, например, после обрыва волокна.
D.4 Штанги
D.4.1 Общие положения
Существует риск того, что движение жесткой поверхности штанги будет затруднено или заблокировано. Это может быть вызвано любой из следующих причин:
- выход из строя за счет блокировки или заклинивания;
- длительное накопление грязи;
- коробление жесткой активной поверхности;
- заедание направляющих.
D.4.2 Использование позиционных переключателей
Если позиционные переключатели используются в штангах, следует учитывать следующие конструктивные характеристики:
- поднятие или снятие датчика;
- коробление верхней поверхности из-за перегрузок;
- залипание позиционных выключателей из-за нечастого использования;
- чрезмерный износ или перекос кулачков в кулачковых системах;
- позиционные переключатели ослабевают на кронштейнах, что приводит к смещению.
Если позиционные переключатели используются в штангах, следует учитывать их надежность в связи с последствиями их отказа. Следует использовать позиционные переключатели, изготовленные в соответствии с IEC 60947-5-1:2003, раздел 3.
D.4.3 Точки захвата
Следует уделить внимание конструкции штанги, в отношении точек захвата. По возможности зазоры, которые закрываются при деформации датчика, должны быть устранены на этапе проектирования. Если имеется зазор, который уменьшается при перемещении или деформации датчика, зазор должен оставаться достаточно большим, чтобы не стать опасной ловушкой.
(справочное)
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
E.1 Монтаж датчика
Монтажная поверхность должна подходить для используемого датчика. Если монтажная поверхность недостаточно жесткая или имеет большие неровности, чувствительность и надежность кромки или штанги может быть уменьшена. Если датчик вступает в регулярный или повторяющийся контакт с поверхностью, острые края или неровности следует избегать, так как они могут привести к повреждению.
Соединительные кабели, трубки и т.д. между датчиком и блоком управления должны быть спроектированы, расположены и зафиксированы так, чтобы они были:
a) способны выдерживать проектные условия;
b) защищены от механических повреждений;
c) прочно закреплены на каждом конце, чтобы предотвратить нагрузку на соединения.
E.2 Рассмотрение влияния окружающей среды
Необходимо учитывать следующие факторы окружающей среды:
- воздействие гидравлических и смазочно-охлаждающих масел;
- комбинации жидкостей;
- жидкости, поступающие в герметичные системы;
- эффект металлической стружки;
- действие чистящих жидкостей;
- влияние лучистого тепла, например, когда датчики находятся под прямыми солнечными лучами или поблизости от горячих поверхностей;
- последствия изменений температуры окружающей среды;
- последствия замораживания;
- возможные эффекты любых комбинаций вышеперечисленного.
Примечание - Вышеприведенный список не является исчерпывающим, к конкретным применениям могут применяться особые условия.
E.3 Расположение датчика
Датчик должен иметь достаточно эффективную чувствительную поверхность и должен быть установлен таким образом, чтобы обеспечивать наиболее эффективное направление для прогнозируемого направления срабатывания.
(справочное)
ПО ВВОДУ В ЭКСПЛУАТАЦИЮ И ИСПЫТАНИЯМ ПОСЛЕ УСТАНОВКИ
F.1 Общие положения
В настоящем приложении приведены рекомендации по вводу в эксплуатацию и испытаниям после установки для обеспечения безопасной эксплуатации системы в целом (см. раздел 6 в отношении требований к информации для выбора и использования).
Система должна устанавливаться, вводиться в эксплуатацию, испытываться и обслуживаться в соответствии с информацией, поставляемой изготовителем защитного устройства.
Лицо, выполняющее ввод в эксплуатацию, должно обеспечить выполнение следующих проверок:
a) что кромка или штанга подходят для условий окружающей среды;
b) что кромка или штанга надежно закреплены;
c) номинальные значения и характеристики всех вводов/выводов, например, номинальные значения предохранителей;
d) что снятие источника питания с кромки или штанги предотвращает дальнейшую опасную эксплуатацию машины, и что опасные части машины не могут быть повторно активированы до тех пор, пока функция безопасности не будет восстановлена;
e) что опасные части машины не могут быть приведены в движение при усилии, приложенном к эффективной сенсорной поверхности;
f) что датчик был установлен для обеспечения защиты от всех предвидимых направлений срабатывания, и нечувствительные (мертвые) поверхности не увеличат риск получения травм;
g) что активация кромки или штанги во время опасной фазы рабочего цикла приводит к остановке опасных движущихся частей или, при необходимости, если в остальном состояние безопасное, и что опасные движущиеся детали не могут быть приведены в действие снова, если функция безопасности не была восстановлена;
h) что при необходимости были предусмотрены дополнительные меры безопасности для предотвращения доступа к опасным частям машин с любого направления, не защищенного сенсорным защитным устройством;
i) поскольку адекватная безопасность, необходимая для машины, зависит от полноты безопасности интерфейса между машиной и ее защитным(и) устройством(ами), необходимо проверить, что все части машины, включая защиту, цепь управления и соединения с защитой соответствуют результатам оценки рисков, а также категории и уровню эффективности в соответствии с ISO 13849-1, как указано в соответствующем(их) стандарте(ах);
j) что устройства подавления (если они установлены) испытаны на соответствие требованиям ISO 13849-1:2006, 5.2;
k) что все контрольные лампы работают правильно;
l) что чувствительность кромки и штанги по всей эффективной сенсорной поверхности соответствует инструкциям изготовителя;
m) если предусмотрен сброс, следует проверить, что машина не может работать до тех пор, пока система не будет сброшена.
Примечание - Дополнительные проверки могут потребоваться по соответствующим стандартам типа C.
F.4 Регулярные проверки и испытания
Следует проводить регулярные проверки и испытания в соответствии с инструкциями и рекомендациями изготовителя.
Проверки, указанные в F.3, следует повторить. Кроме того, следует осмотреть и/или проверить следующее.
a) Проверить элементы управления машиной, чтобы убедиться, что они работают правильно и не нуждаются в техническом обслуживании и/или замене.
b) Осмотреть машину, чтобы убедиться в отсутствии других механических или структурных аспектов, которые могли бы предотвратить его останов или переход в иное безопасное состояние при остановке кромкой или штангой.
c) Осмотреть блоки управления машиной и соединения с кромкой и штангой, чтобы убедиться, что не было сделано никаких модификаций, которые неблагоприятно влияют на систему, и что соответствующие модификации были должным образом зарегистрированы.
d) Осмотреть состояние поверхности датчика и его соединений, чтобы убедиться в отсутствии повреждений, которые могут помешать системе работать по назначению.
e) Проверить эффективность кромки или штанги при включенном питании, но в состоянии покоя машины. Изменить точку активации, чтобы убедиться, что вся эффективная сенсорная поверхность испытывается в течение определенного периода времени.
f) Если предусмотрен сброс, проверить, что машина не может работать до тех пор, пока система не будет сброшена.
g) Осмотреть все корпуса блока управления, чтобы убедиться, что они закрыты, находятся в хорошем состоянии и могут быть открыты только ключом или инструментом. Осмотреть и убедиться, что ключи удалены для хранения назначенным персоналом.
F.5 Осмотр и испытания после технического обслуживания
После проведения технического обслуживания испытания функции безопасности в соответствии с уровнем технического обслуживания должны выполняться в соответствии с указаниями, представленными в F.2.
(справочное)
ISO 13849-1, КАТЕГОРИЯ 2
G.1 Общие положения
Некоторые системы, особенно системы импульса давления, используются уже много лет. Однако отказы произошли там, где системы не проверялись автоматически. Системы, которые не проверяются автоматически, не могут соответствовать требованиям категории 2. В настоящем приложении приводится руководство о способе обеспечения соответствия сенсорных защитных устройств требованиям категории 2.
G.2 Проверка функции безопасности
Функцию безопасности всей системы следует проверять при каждом цикле работы части машины, на которой установлен датчик, например, движущаяся дверь или ограждение с кромкой.
G.3.1 При проверке датчика импульса давления должен формироваться импульс давления (выходной сигнал датчика) на самом дальнем конце от переключателя импульсов давления.
G.3.2 Уровень этого "проверочного" импульса давления не должен превышать уровень, генерируемый минимальным усилием активации, приложенным через испытуемый образец 1 при минимальной рабочей скорости, используемой в приложении.
G.3.3 Выходной сигнал датчика импульса давления должен переводить устройство переключения выходного сигнала в состояние "ВЫКЛ". Дальнейшая эксплуатация машины должна быть разрешена только после успешного завершения этого испытания.
(справочное)
МЕЖГОСУДАРСТВЕННЫМ СТАНДАРТАМ
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 4413 | IDT | ГОСТ ISO 4413-2016 "Гидроприводы. Общие правила и требования безопасности для систем и их компонентов" |
ISO 4414 | IDT | ГОСТ ISO 4414-2016 "Пневмоприводы. Общие правила и требования безопасности для систем и их компонентов" |
ISO 12100:2010 | IDT | ГОСТ ISO 12100-2013 "Безопасность машин. Основные принципы конструирования. Оценки риска и снижения риска" |
ISO 13849-1:2006 | IDT | ГОСТ ISO 13849-1-2014 "Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования" |
ISO 13849-2 | IDT | ГОСТ ISO 13849-2-2023 "Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 2. Общие принципы конструирования" |
IEC 60068-2-6 | - | |
IEC 60068-2-14 | - | |
IEC 60068-2-27 | - | |
IEC 60068-2-78 | - | |
IEC 60204-1:2005 | - | |
IEC 60529 | MOD | ГОСТ 14254-2015 "Степени защиты, обеспечиваемые оболочками (Код IP)" |
IEC 60664-1:2007 | - | |
IEC 60947-5-1:2003 | IDT | ГОСТ IEC 60947-5-1-2014 "Аппаратура распределения и управления низковольтная. Часть 5-1. Аппараты и коммутационные элементы цепей управления. Электромеханические устройства цепей управления" |
IEC 61000-4-2 | MOD | ГОСТ 30804-4-2-2013 "Совместимость технических средств электромагнитная. Устойчивость к электростатическим разрядам. Требования и методы испытаний" |
IEC 61000-4-3 | IDT | ГОСТ IEC 61000-4-3-2016 "Электромагнитная совместимость (ЭМС). Часть 4-3. Методы испытаний и измерений. Испытание на устойчивость к излучаемому радиочастотному электромагнитному полю" |
--------------------------------
<1> В Российской Федерации действует ГОСТ Р МЭК 60068-2-78-2009 "Испытания на воздействия внешних факторов. Часть 2-78. Испытания. Испытание Cab: Влажное тепло, постоянный режим", идентичный IEC 60068-2-78:2001.
<2> В Российской Федерации действует ГОСТ Р МЭК 60204-1-2007 "Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования", идентичный IEC 60204-1:2005.
<3> Действует ГОСТ IEC 60664-1-2023 "Координация изоляции для оборудования низковольтных систем питания. Часть 1. Принципы, требования и испытания", идентичный IEC 60664-1:2020.
Окончание таблицы ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
IEC 61000-4-4 | IDT | ГОСТ IEC 61000-4-4-2016 "Электромагнитная совместимость (ЭМС). Часть 4-4. Методы испытаний и измерений. Испытание на устойчивость к электрическим быстрым переходным процессам (пачкам)" |
IEC 61000-4-5 | IDT | ГОСТ IEC 61000-4-5-2017 "Электромагнитная совместимость (ЭМС). Часть 4-5. Методы испытаний и измерений. Испытание на устойчивость к выбросу напряжения" |
IEC 61000-4-6 | IDT | ГОСТ IEC 61000-4-6-2022 "Электромагнитная совместимость. Часть 4-6. Методы испытаний и измерений. Устойчивость к кондуктивным помехам, наведенным радиочастотными полями" |
IEC 61000-6-2 | MOD | ГОСТ 30804-6-2-2013 "Совместимость технических средств электромагнитная. Устойчивость к электромагнитным помехам технических средств, применяемых в промышленных зонах. Требования и методы испытаний" |
IEC 61439-1:2011 | - | |
<*> Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированные стандарты. | ||
--------------------------------
<1> Действует ГОСТ IEC 61439-1-2024 "Устройства комплектные низковольтные распределения и управления. Часть 1. Общие требования", идентичный IEC 61439-1:2020.
[1] | ISO 14119 | Safety of machinery - Interlocking devices associated with guards - Principles for design and selection (Безопасность машин. Блокировочные устройства для ограждений. Принципы конструкции и выбора) |
[2] | ISO 1412 | Safety of machinery - Guards - General requirements for the design and construction of fixed and movable guards (Безопасность машин. Защитные ограждения. Общие требования к проектированию и конструированию стационарных и съемных защитных ограждений) |
[3] | IEC 61496-1 | Safety of machinery - Electro-sensitive protective equipment - Part 1: General requirements and tests (Безопасность механизмов. Защитная электрочувствительная аппаратура. Часть 1. Общие требования и испытания) |
[4] | IEC 61496-2 | Safety of machinery - Electro-sensitive protective equipment - Part 2: Particular requirements for equipment using active opto-electronic protective devices (AOPDs) (Безопасность механизмов. Защитная электрочувствительная аппаратура. Часть 2. Частные требования к аппаратуре, использующей активные оптоэлектронные защитные приборы (AOPD)) |
[5] | IEC 61496-3 | Safety of machinery - Electro-sensitive protective equipment - Part 3: Particular requirements for active opto-electronic protective devices responsive to diffuse reflection (AOPDDR) (Безопасность механизмов. Защитная электрочувствительная аппаратура. Часть 3. Частные требования к средствам защиты, использующим активные оптоэлектронные защитные устройства, чувствительные к диффузному отражению (AOPDDR)) |
УДК 62.7:006.354 | МКС 13.110 | IDT |
Ключевые слова: защитные устройства, чувствительные к давлению; сенсорные кромки; сенсорные штанги | ||