СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ вводится в действие с 01.01.2027 с правом досрочного применения.
Название документа
"ГОСТ IEC 61000-4-33-2024. Межгосударственный стандарт. Электромагнитная совместимость. Часть 4-33. Методы испытаний и измерений. Методы измерений переходных параметров высокой мощности"
(введен в действие Приказом Росстандарта от 14.11.2025 N 1397-ст)
"ГОСТ IEC 61000-4-33-2024. Межгосударственный стандарт. Электромагнитная совместимость. Часть 4-33. Методы испытаний и измерений. Методы измерений переходных параметров высокой мощности"
(введен в действие Приказом Росстандарта от 14.11.2025 N 1397-ст)
Содержание
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 14 ноября 2025 г. N 1397-ст
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ
ЧАСТЬ 4-33
МЕТОДЫ ИСПЫТАНИЙ И ИЗМЕРЕНИЙ
МЕТОДЫ ИЗМЕРЕНИЙ ПЕРЕХОДНЫХ ПАРАМЕТРОВ ВЫСОКОЙ МОЩНОСТИ
Electromagnetic compatibility. Part 4-33.
Testing and measurement techniques. Measurement methods
for high-power transient parameters
(IEC 61000-4-33:2005, Electromagnetic compatibility (EMC) -
Part 4-33: Testing and measurement techniques - Measurement
methods for high-power transient parameters, IDT)
ГОСТ IEC 61000-4-33-2024
МКС 33.100.10;
Дата введения
1 января 2027 года
с правом досрочного применения
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Испытания и сертификация бытовой и промышленной продукции "БЕЛЛИС" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 31 мая 2024 г. N 173-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узбекское агентство по техническому регулированию |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 14 ноября 2025 г. N 1397-ст межгосударственный стандарт ГОСТ IEC 61000-4-33-2024 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2027 г. с правом досрочного применения
5 Настоящий стандарт идентичен международному стандарту IEC 61000-4-33:2005 "Электромагнитная совместимость (ЭМС). Часть 4-33. Методы испытаний и измерений. Методы измерений переходных параметров высокой мощности" ("Electromagnetic compatibility (EMC) - Part 4-33: Testing and measurement techniques - Measurement methods for high-power transient parameters", IDT).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ 1.5 (подраздел 3.6).
Международный стандарт разработан подкомитетом 77C "Переходные параметры высокой мощности" Технического комитета по стандартизации 77 "Электромагнитная совместимость" Международной электротехнической комиссии (IEC).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
IEC 61000 публикуется отдельными частями в соответствии со следующей структурой:
Часть 1: | Общие положения; Общие соображения (введение, основополагающие принципы); Определения, терминология; |
Часть 2: | Условия окружающей среды; Описание окружающей среды; Классификация окружающей среды; Уровни совместимости; |
Часть 3: | Нормы; Пределы эмиссии; Пределы устойчивости (поскольку они не подпадают под ответственность комитетов); |
Часть 4: | Методы испытаний и измерений; Методы измерений; Методы испытаний; |
Часть 5: | Руководство по монтажу и подавлению помех; Рекомендации по установке; Методы и устройства подавления помех; |
Часть 6: | Общие стандарты; |
Часть 9: | Определения. |
Каждая часть далее подразделяется на несколько частей и публикуется либо в виде международных стандартов, либо в виде технических спецификаций или технических отчетов, некоторые из которых уже опубликованы в виде разделов. Другие будут опубликованы с номером, за которым следует тире и второй номер, идентифицирующий подразделение (пример: 61000-6-1).
Настоящий стандарт содержит базовое описание методов и средств (например, контрольно-измерительных приборов) для измерения откликов, возникающих в результате мощных переходных электромагнитных параметров. Эти отклики могут включать:
- электрическое (E) и/или магнитное (H) поля (например, случайные поля или случайные плюс рассеянные поля в испытуемой системе);
- ток I (например, индуцированный переходным полем или внутри испытуемой системы);
- напряжение V (например, вызванное переходным полем или внутри испытуемой системы);
- заряд Q, индуцированный на кабеле или другом проводнике.
Примечание 1 - Заряд Q на проводнике является фундаментальной величиной, которая может быть определена на любой частоте. Однако напряжение V является определенной (например, вторичной) величиной, которая действительна только на низких частотах. На высоких частотах напряжение не может быть определено как линейный интеграл электронного поля, поскольку этот интеграл зависит от пути. Таким образом, для очень быстрых нарастающих импульсов (имеющих большое высокочастотное спектральное содержание) использование напряжения в качестве наблюдаемого измерения недопустимо. В этом случае заряд является желаемой величиной, подлежащей измерению.
Эти измеряемые величины, как правило, представляют собой сложные, зависящие от времени формы сигналов, которые могут быть приблизительно описаны несколькими скалярными параметрами или "наблюдаемыми". Эти параметры включают:
- пиковую амплитуду отклика;
- время нарастания;
- формы сигнала, время спада формы сигнала (или длительность);
- ширину импульса и
- математически определенные нормы, полученные из формы сигнала.
Настоящий международный стандарт предоставляет информацию об измерении этих сигналов и о математическом определении описывающих параметров. В стандарте не приведена информация о требованиях к конкретному уровню испытания.
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
IEC 60050-161, International Electrotechnical Vocabulary (IEV) - Chapter 161: Electromagnetic compatibility (Международный электротехнический словарь. Глава 161. Электромагнитная совместимость)
IEC 61000-2-9, Electromagnetic compatibility (EMC) - Part 2: Environment - Section 9: Description of HEMP environment - Radiated disturbance (Электромагнитная совместимость (ЭМС). Часть 2. Условия окружающей среды. Раздел 9. Описание электромагнитного импульса при высотных (ядерных) взрывах (HEMP). Испускаемые помехи. Основная публикация по ЭМС)
IEC 61000-2-10, Electromagnetic compatibility (EMC) - Part 2-10: Environment - Description of HEMP environment - Conducted disturbance (Электромагнитная совместимость (ЭМС). Часть 2-10. Условия окружающей среды HEMP. Кондуктивные помехи)
IEC 61000-4-20, Electromagnetic compatibility (EMC) - Part 4-20: Testing and measurement techniques - Emission and immunity testing in transverse electromagnetic (TEM) waveguides (Электромагнитная совместимость (ЭМС). Часть 4-20. Методы испытаний и измерений. Испытание на помехоэмиссию и помехоустойчивость в поперечных электромагнитных волноводах (TEM)
IEC 61000-4-23, Electromagnetic compatibility (EMC) - Part 4-23: Testing and measurement techniques - Test methods for protective devices for HPEM and other radiated disturbances (Электромагнитная совместимость (ЭМС). Часть 4-23. Методы испытаний и измерений. Методы испытаний защитных устройств от ЭМИ ВЯВ и других излучаемых помех)
IEC 61000-4-25, Electromagnetic compatibility (EMC) - Part 4-25: Testing and measurement techniques - HEMP immunity test methods for equipment and systems (Электромагнитная совместимость (ЭМС). Часть 4-25. Методы испытаний и измерений. Методы испытаний на помехоустойчивость оборудования и систем от HEMP)
В настоящем стандарте применены термины по IEC 60050-161, а также следующие термины с соответствующими определениями.
3.1 электрически малый (electrically small): Относится к размеру объекта относительно длины волны электромагнитного поля. Когда объект намного меньше длины волны, говорят, что он электрически мал.
3.2 эквивалентная площадь (equivalent area): Внутренний параметр датчика магнитного потока (контура), который связывает напряжение разомкнутой цепи датчика со скоростью изменения плотности магнитного потока, проходящего через датчик.
3.3 эквивалентная высота (equivalent height): Внутренний параметр датчика электрического поля (диполя), который связывает измеренное напряжение на зажимах датчика с компонентом электрического поля, возбуждающего датчик.
3.4 датчик свободного поля (free-field sensor): Датчик электромагнитного поля, используемый в месте, удаленном от любого рассеивающего тела или плоскости заземления.
3.5 электромагнитный сигнал высокой мощности; ЭМСВМ (high power electromagnetic (HPEM)): Общая сфера или технология, связанная с созданием интенсивных электромагнитных излучаемых полей или проводимых напряжений и токов, которые способны повредить или вывести из строя электронные системы. Как правило, эти помехи превышают те, которые возникают при нормальных условиях (для примера - 100 В/м).
3.6 измерительная цепочка (measurement chain): Одно или несколько электрических устройств, соединенных вместе с целью измерения и записи электромагнитного сигнала.
3.7 частота Найквиста (Nyquist frequency): Частота Найквиста представляет собой полосу пропускания дискретизированного сигнала и равна половине частоты дискретизации этого сигнала. Если дискретизированный сигнал представляет непрерывный спектральный диапазон, начинающийся с 0 Гц (что является наиболее распространенным случаем для записей речи), частота Найквиста является самой высокой частотой, которую дискретизированный сигнал может однозначно представлять.
3.8 предварительный импульс (pre-pulse): Относится к части импульсоподобной переходной формы сигнала, которая возникает за время до момента первичного пика.
3.9 датчик (sensor): Преобразователь, который воспринимает определенную электромагнитную величину (такую как электрическое или магнитное поле, ток или заряд) и преобразует ее в напряжение или ток, которые могут быть измерены. Как правило, это первый элемент в цепочке измерений для электромагнитных измерений.
3.10 норма формы сигнала (waveform norm): Параметр, который определяется с помощью математически четко определенной операции над формой сигнала, или сигнал (например, интегрирование формы сигнала), который дает скалярное число, позволяющее сравнивать различные формы сигнала или их эффекты.
3.11 параметр(ы) формы сигнала (waveform parameter(s)): Единственный параметр, обозначающий характеристику формы сигнала (например, время нарастания формы сигнала), который трудно привести к формализму норм формы сигнала, но который полезен при описании отклика.
3.12 -точка (-dot): Суффикс (как в I-точке), который обозначает производную относительно времени величины I, подразумевая, что измерение пропорционально временной скорости нарастания отклика I.
Настоящий стандарт касается измерения и описания мощных переходных сигналов, возникающих в результате ядерного взрыва на большой высоте (именуемого высотным электромагнитным импульсом - ВЭМИ) или в результате использования источника переходных процессов (или генератора импульсов), создающего мощные электромагнитные (ЭМСВМ) поля. Как правило, измеряемые физические величины включают электрическое (E) и магнитное (H) поля внутри (или вблизи) установки или объекта испытания или индуцированный ток и заряд (или напряжение) на проводниках, входящих в установку или объект испытания.
В данном разделе описываются общие методы измерения этих переходных откликов, а в приложении A предлагается несколько параметров формы сигнала и норм, которые должны использоваться для описания измеренных откликов. Многие из методов измерения и оборудования также могут быть использованы для измерения сигналов временной гармоники (т.е. в частотной области); однако это применение далее в настоящем стандарте не рассматривается, поскольку будет рассматриваться только измерение переходных сигналов.
Измерение величин переходного отклика осуществляется с помощью ряда элементов обработки переходного сигнала, последовательно соединенных между собой. Именуемый цепочкой измерений, этот набор оборудования будет обнаруживать, обрабатывать, передавать и записывать измеренные переходные характеристики, чтобы их можно было использовать после завершения испытания для анализа измеренной величины или электрических характеристик испытываемой системы.
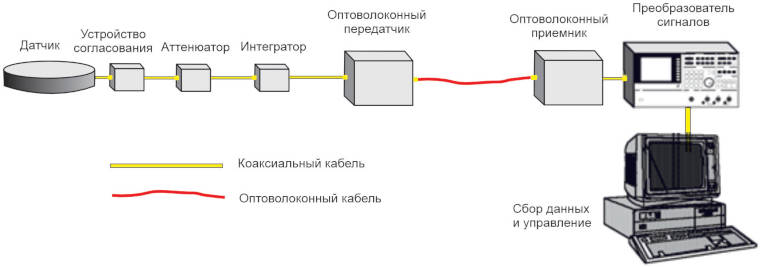
На рисунке 1 изображены две типичные измерительные цепи, которые должны использоваться для измерения переходных откликов высокой мощности. Цепочка измерений, изображенная на рисунке 1, a), содержит следующие элементы:
коаксиального кабеля и оптоволокна
с коаксиальными сигнальными линиями
для измерения переходных характеристик высокой мощности
- Коаксиальный кабель - этот элемент обеспечивает электрическое соединение между различными элементами измерительной цепи при постоянном сопротивлении (обычно 50 Ом). Альтернативой этому элементу является оптоволоконная система передачи, обсуждаемая ниже.
- Датчик - устройство, которое преобразует измеренную величину (электромагнитное поле, ток или заряд) в напряжение, которое может быть измерено.
- Устройство согласования - устройство, которое работает как согласующий трансформатор для обеспечения согласования датчика с коаксиальной сигнальной линией. Это устройство также помогает подавлять сигналы общего режима.
- Аттенюатор - устройство уменьшения сигнала, установленное в линии для уменьшения уровня сигнала датчика, если он слишком велик.
- Интегратор - активное или пассивное устройство для временной интеграции выходных данных датчика. Это необходимо, поскольку в некоторых случаях датчик будет реагировать на скорость изменения во времени (например, производную) измеряемой величины. (Интеграция сигналов также может быть выполнена с помощью программного обеспечения.)
- Оптоволоконный передатчик - устройство для преобразования измеренного быстрого переходного электрического сигнала в модулированный оптический сигнал, который может передаваться вдали от датчика к удаленному записывающему устройству.
- Оптоволоконный кабель - непроводящий волоконный кабель, который может быть проложен внутри испытываемой системы и вокруг нее, чтобы обеспечить передачу оптического сигнала на удаленный оптический приемник.
- Оптоволоконный приемник - устройство, которое принимает модулированный оптический сигнал от передатчика, демодулирует его и восстанавливает встроенную информацию с датчика.
- Преобразователь формы сигнала в цифровую форму - это детектор в измерительной цепочке, который принимает электрический аналоговый сигнал датчика, преобразует его в поток цифровых данных и затем передает эти данные на записывающее устройство.
- Компьютер сбора данных и управления - основной логический процессор для проведения измерений, хранения и анализа результатов.
Дополнительная информация по каждому из этих элементов в цепочке измерений будет предоставлена позже в этом разделе.
Не все элементы измерительной цепочки, изображенные на рисунке 1, a), всегда необходимы. Например, аттенюатор требуется только в том случае, если отклик датчика настолько велик, что он имеет тенденцию перегружать оптоволоконный (ОВ) передатчик и вызывать искажения сигнала. Аналогичным образом некоторые датчики могут иметь автономный интегратор, так что элемент интегратора в измерительной цепочке должен быть опущен.
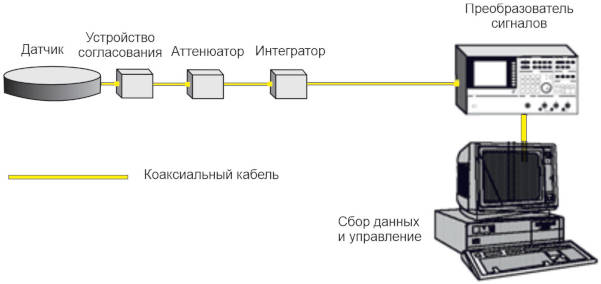
На рисунке 1, b) показан случай, когда вся измерительная цепочка соединена между собой только коаксиальным кабелем. ОВ-система в этом случае отсутствует, возможно, из-за какой-то особенности измеряемого сигнала:
- динамический диапазон требуемого сигнала больше, чем тот, который обеспечивается оборудованием для ОВ-передачи/приема;
- измеренный импульс намного быстрее, чем возможности передачи ОВ-системы; или
- возможно, стоимость ОВ-системы непомерно высока.
Независимо от конфигурации измерительной цепочки существует несколько основных принципов измерения, которые должны быть признаны в ходе выполнения измерений. Они заключаются в следующем.
- Измерительный датчик всегда возмущает электромагнитное поле вблизи себя (или влияет на локальный ток и/или плотность заряда). Можно сказать, что, если бы датчик был сконструирован так, чтобы не возмущать поле, он зарегистрировал бы нулевой отклик.
- Использование измерительной цепочки может "нагрузить" измеряемую систему или контур, так что полученные показания могут не соответствовать истинному отклику.
- Измерительная цепочка может использоваться для измерения откликов как в ближнем, так и в дальнем поле. Как правило, датчик поля измеряет только одну из трех ортогональных составляющих E- или H-поля, и при описании откликов неважно, находится ли точка наблюдения в ближней зоне или в дальней зоне. В дальней зоне отношение E/H главных (поперечных) компонентов поля равно импедансу свободного пространства (377 Ом), но в ближней зоне это соотношение E/H не поддерживается.
- Датчик должен быть откалиброван таким образом, чтобы обеспечить подходящее соотношение между его электрической мощностью и величиной отклика, которую он измеряет.
- В дополнение к датчику остальная часть измерительной цепочки также может добавлять ошибки к измеряемой величине электромагнитного поля, и такие ошибки должны быть сведены к минимуму. Такие ошибки могут возникать как из-за вторичного рассеяния от измерительного оборудования (что добавляет погрешность в измеряемых величинах основного электромагнитного поля), так и из-за возмущения отклика, обеспечиваемого датчиком при его распространении по измерительной цепи (например, из-за внешних синфазных токов в коаксиальном кабеле, влияющих на внутренний сигнал через сопротивление передачи экрана). Использование ОВ-системы передачи является одним из способов минимизации этого нежелательного возмущения. Другие способы включают тщательную прокладку коаксиального кабеля, чтобы свести к минимуму помехи, использование ферритовых бусин на коаксиальном кабеле для ослабления индуцированных токов, дополнительное экранирование коаксиальных линий и сохранение длины коаксиальной линии как можно короче.
- Процедуры калибровки должны применяться ко всем элементам измерительной цепочки. Интегратор идеально функционирует только в определенном диапазоне частот. Коаксиальный кабель имеет увеличивающиеся потери по мере увеличения частоты. Каждый из этих фактов должен быть принят во внимание при разработке сквозной калибровки измерительной цепочки.
- Должен быть определен шум измерительной системы, и его влияние на измеренные величины отклика должно быть определено количественно.
- Как только "необработанная" форма сигнала измерена и оцифрована записывающим устройством, должна быть применена функция калибровки и определена "скорректированная" форма сигнала отклика.
- После определения скорректированной формы сигнала она должна быть суммирована с помощью одного или нескольких параметров формы сигнала или норм, указанных в приложении A.
Детали и требования к каждому из этих элементов измерительной цепочки будут рассмотрены в 4.3.
Измеренная, скорректированная и оцифрованная форма сигнала, которая в конечном итоге записывается компьютером сбора данных, обычно является сложной функцией времени. Чтобы легко отличать одну форму сигнала от другой и соотносить конкретную форму сигнала с возможным воздействием на систему или объект, следует использовать одно или несколько скалярных чисел, представляющих формы сигнала. Таким образом, только несколько чисел, в отличие от всей записи данных переходной формы сигнала, могут суммировать суть формы сигнала.
При описании формы сигнала отклика таким образом следует использовать два класса чисел. Параметры формы сигнала - это числа, которые сразу очевидны при изучении переходного отклика, такие как пиковая амплитуда. Нормы формы сигнала, с другой стороны, представляют собой математически определенные скалярные параметры, которые требуют численной обработки общей формы сигнала. Примером может служить энергия, содержащаяся в форме волны. В этом разделе стандарта определен каждый из этих типов параметров формы сигнала.
В приложении A содержится дополнительная информация о том, каким образом измеряется переходный процесс.
Как отмечено на рисунке 1, система измерений состоит из четырех основных элементов. К ним относятся:
- датчик отклика, который измеряет электрический параметр (составляющую электромагнитного поля, ток или заряд) и преобразует его в напряжение;
- система передачи, которая передает измеренное напряжение от датчика к оборудованию детектирования;
- система детектирования (или оцифровки), которая принимает полученный отклик напряжения и преобразует его в цифровой формат для обработки и хранения;
- компьютер, управляющий процессом измерения и выполняющий обработку и хранение данных.
Каждый из этих элементов измерительной цепочки может влиять на амплитуду и форму волны регистрируемого сигнала, и важно понимать такие возмущения и контролировать их. В качестве примера рассмотрим случай переходного электромагнитного поля, описываемого его компонентом электрического поля Eo(t) для воздействия на датчик поля, приведенный на рисунке 1, a), и создания переходного отклика на регистрирующем устройстве, заданном как Rизмеренное(t). Как отмечено в [1] <1>, взаимосвязь между переходным откликом и возбуждением задается операцией свертки (*) как
--------------------------------
<1> Цифры в квадратных скобках относятся к библиографии.
где T(t) - импульсный отклик измерительной системы. Учитывая измеренный отклик Rизмеренное(t), цель состоит в том, чтобы определить возбуждение Eo(t), и [1] символически представляет этот процесс как операцию обратной свертки (1/*):
В [1] обсуждаются различные методы, которые могут быть использованы для оценки этой операции обратной свертки для определения Eo(t), причем одним из них является преобразование уравнений (1) и (2) в частотной области с использованием преобразований Фурье, а затем с использованием концепции передаточной функции [2] для обратной свертки функции возбуждения.
Обозначая преобразования Фурье измеренным переходным откликом и возбуждением электрического поля на датчике через  и
и  соответственно (см. приложение A), эквивалент уравнения (1) в частотной области выражается как
соответственно (см. приложение A), эквивалент уравнения (1) в частотной области выражается как
и 
где теперь операция свертки становится простым умножением на спектр Фурье передаточной функции  . В частотной области операция обратной свертки уравнения (2) задается как обратная уравнению (3) в виде
. В частотной области операция обратной свертки уравнения (2) задается как обратная уравнению (3) в виде

Примечание - В этом стандарте переходные величины представлены с использованием обозначения F(t), а соответствующая спектральная плотность Фурье равна  .
.
Эта обратная свертка легко выполняется, если спектр передаточной функции  не равен нулю на любой реальной частоте f. Как только спектр поля возбуждения определен, переходное поведение этой компоненты поля может быть определено с помощью обратного преобразования Фурье.
не равен нулю на любой реальной частоте f. Как только спектр поля возбуждения определен, переходное поведение этой компоненты поля может быть определено с помощью обратного преобразования Фурье.
Как отмечено на рисунке 1, a), измерительная цепочка состоит из нескольких различных элементов, каждый из которых вносит свой вклад в общую передаточную функцию  . Поскольку каждый элемент в цепи рассчитан на функционирование при постоянном уровне импеданса (обычно 50 Ом), сквозная передаточная функция измерительной цепи
. Поскольку каждый элемент в цепи рассчитан на функционирование при постоянном уровне импеданса (обычно 50 Ом), сквозная передаточная функция измерительной цепи  может быть вычислена как произведение отдельных комплексных частотно-зависимых передаточных функций для каждого элемента в измерительной цепочке. Таким образом, общая передаточная функция задается как
может быть вычислена как произведение отдельных комплексных частотно-зависимых передаточных функций для каждого элемента в измерительной цепочке. Таким образом, общая передаточная функция задается как

Для определения спектра поля возбуждения из уравнения (4) необходимо, чтобы передаточная функция  была известна. Методы точного определения этой передаточной функции (как по величине, так и по фазе в широком диапазоне частот) будут рассмотрены в разделе 6. Однако во многих случаях различные компоненты передаточной функции в уравнении (5) рассчитаны как очень простые функции частоты или даже константы в широком диапазоне частот, и это делает общую передаточную функцию очень простой.
была известна. Методы точного определения этой передаточной функции (как по величине, так и по фазе в широком диапазоне частот) будут рассмотрены в разделе 6. Однако во многих случаях различные компоненты передаточной функции в уравнении (5) рассчитаны как очень простые функции частоты или даже константы в широком диапазоне частот, и это делает общую передаточную функцию очень простой.
В 4.3.2 и приложении B приведено несколько различных типов датчиков, которые обеспечивают выходные отклики, связанные с функцией возбуждения (например, наведенное поле или индуцированный ток). Считается, что отклики этих датчиков бывают двух основных типов: один, который имеет выходной сигнал, приблизительно пропорциональный величине возбуждения, и другой, в котором выходной отклик датчика пропорционален скорости изменения во времени (производной) возбуждения.
Для датчика первого типа переходная характеристика устройства задается как
Vвых(t) = KдатчикаEo(t) (6a)
и соответствующее спектральное представление в частотной области является
 , (6b)
, (6b)где Kдатчика - характеристическая константа датчика.
Для второго типа, или дифференцирующего датчика, выходные данные задаются в виде
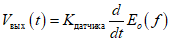 (7a)
(7a)и спектр частотной области равен
 . (7b)
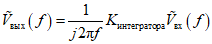
. (7b)В случае когда используется дифференцирующий датчик, необходимо обеспечить некоторую функцию интегрирования для восстановления функции возбуждения из производного сигнала, подаваемого датчиком. Это может быть обеспечено либо интегрирующим элементом схемы в измерительной цепочке (более подробно описано в 4.3.5), либо последующей обработкой вычисленного отклика с использованием численных методов. Если необходимо использовать аппаратное интегрирование сигнала, интегратор обеспечивает выходной сигнал, пропорциональный интегралу входного сигнала, и в частотной области это выражается как
 , (8)
, (8)где Kинтегратора - характеристическая константа для компонента интегратора.
Таким образом, когда в измерительной цепочке используется дифференцирующий датчик, измеренный отклик из уравнения (3) может быть представлен в виде
 ;
;

и если используется самоинтегрирующийся датчик, измеренный отклик составляет
 ;
;
 .
.Скалярные коэффициенты компонентов Ki в уравнениях (9a) и (9b) обычно предоставляются производителями компонентов измерительной цепи и часто используются без дополнительной калибровки. Однако для точных измерений таких полей ЭМСВМ каждый из этих компонентов должен быть откалиброван перед использованием в программе измерений.
Независимо от типа датчика, используемого при измерении, общая передаточная функция K используется для вычисления спектра функции возбуждения в виде

Поскольку K не зависит от частоты, результирующий переходной отклик представлен как

Во многих практических случаях, связанных с переходными сигналами, имеющими быстрое время нарастания, интересующий диапазон частот таков, что передаточная функция  не является постоянной величиной в диапазоне частот.
не является постоянной величиной в диапазоне частот.
Следовательно, уравнения (10) и (11) не подходят для определения возбуждения по измеренному отклику. В таких случаях необходимо определить общую комплексную передаточную функцию измерительной цепи методами калибровки, а затем использовать уравнение (4) для вычисления функции возбуждения.
Как обсуждалось в 4.3, первым элементом в измерительной цепочке на рисунке 1 является электромагнитный датчик, который взаимодействует с локальным электромагнитным полем (или током, или зарядом) и выдает выходное напряжение. Конструкция датчика была подробно описана Баумом [3], [4], где изложены следующие требования к "идеальному" датчику.
a) Это аналоговое устройство, которое преобразует интересующую электромагнитную величину в напряжение или ток (в контексте схемы) на некоторой паре зажимов для управления сопротивлением нагрузки, обычно постоянным сопротивлением, соответствующим линии передачи (кабелю), заканчивающимся ее характеристическим импедансом.
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
б) Он пассивен.
Примечание - Как указано в приложении B, также возможно наличие активных датчиков; однако считается, что пассивный датчик проще в калибровке и, следовательно, часто считается более желательным, чем активные датчики.
c) Это первичный стандарт в том контексте, что для преобразования полей в напряжение и ток его чувствительность хорошо известна с точки зрения его геометрии; т.е. он "калибруется линейкой" [5]. Импедансы нагружающих элементов могут быть измерены и скорректированы. С другой стороны, это в принципе так же точно, как стандартное поле (напряжение и т.д.) в калибровочном устройстве. (В этом контексте точность в несколько процентов обычно легкодостижима.)
Примечание - Это требование предъявляется к "идеальному" датчику, в котором существует простая геометрическая зависимость между измеряемой составляющей поля и его выходным сигналом. Это упрощает процедуры калибровки датчика. Для других типов датчиков, которые не "калибруются с помощью линейки", процесс калибровки должен выполняться, как описано в 6.2.2.
d) Он сконструирован таким образом, чтобы иметь определенную удобную чувствительность для своей передаточной функции, которая часто выражается в виде эквивалентной площади или эффективной высоты.
e) Его передаточная функция спроектирована так, чтобы быть простой в широком диапазоне частот. Это может означать "линейный", в контексте вольт на единицу поля или скорости нарастания поля, или может означать какую-то другую простую математическую форму, которая может быть задана с помощью нескольких констант (в этом случае выбирается более одного конкретного удобного числа чувствительности).
При использовании таких датчиков важно иметь в виду, что внутри датчика и на его кабелях могут возникать значительные напряжения. Если измеряемая величина слишком велика для конструкции датчика, внутри датчика может возникнуть корона или дуга, что приведет к неправильному считыванию отклика или, возможно, к повреждению датчика. Таким образом, датчик должен быть тщательно подобран с учетом ожидаемого уровня срабатывания, подлежащего измерению.
Приложение B содержит более подробную информацию о представлениях передаточных функций для различных типов датчиков электромагнитного поля. Дополнительные сведения о физической реализации датчиков также приведены в IEC 61000-4-23 (приложение C).
Когда балансный электромагнитный датчик, такой как дипольная антенна, подключается по коаксиальному кабелю, возможно, что часть индуцированного антенного тока будет протекать по внешней поверхности кабельного экрана. Такие токи могут протекать вокруг внешних корпусов измерительного оборудования и передавать энергию в линии электропередачи или в заземляющее соединение. Это может привести к непредсказуемой работе оборудования и непреднамеренным помехам для другого оборудования. На рисунке 2 изображено такое соединение, где очевидно, что часть тока от датчика Iвых неконтролируемо течет по внешней стороне коаксиального кабеля и корпуса оборудования. Iвых также можно рассматривать как синфазную часть тока кабеля.
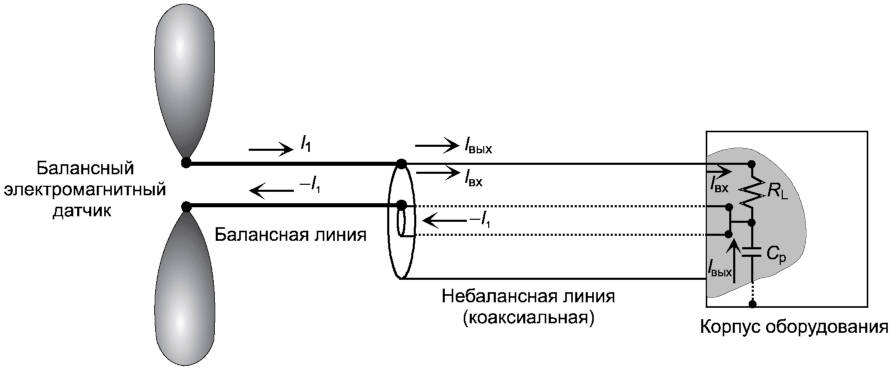
Рисунок 2 - Иллюстрация симметричного датчика и кабеля,
подключенного к несимметричной (коаксиальной) линии,
где Iвых + Iвх = I1
Устройство согласования предотвращает протекание тока Iвых по внешней стороне кабеля и помогает сохранить баланс тока антенны и линии питания. Как таковой он обеспечивает высокий импеданс для синфазных токов, протекающих по структуре линии передачи, в то же время позволяя токам дифференциального режима протекать беспрепятственно.
Существует много различных конструкций устройств согласования, некоторые из которых основаны на резонансных характеристиках линий передачи (и, следовательно, являются узкополосными в своей работе), а другие - широкополосные устройства. Часто ферритовые дроссели могут использоваться для минимизации нежелательных синфазных токов в балансной линии. Для измерений переходных процессов устройства согласования должны быть широкополосными, чтобы адекватно поддерживать форму волны измеряемого электромагнитного поля.
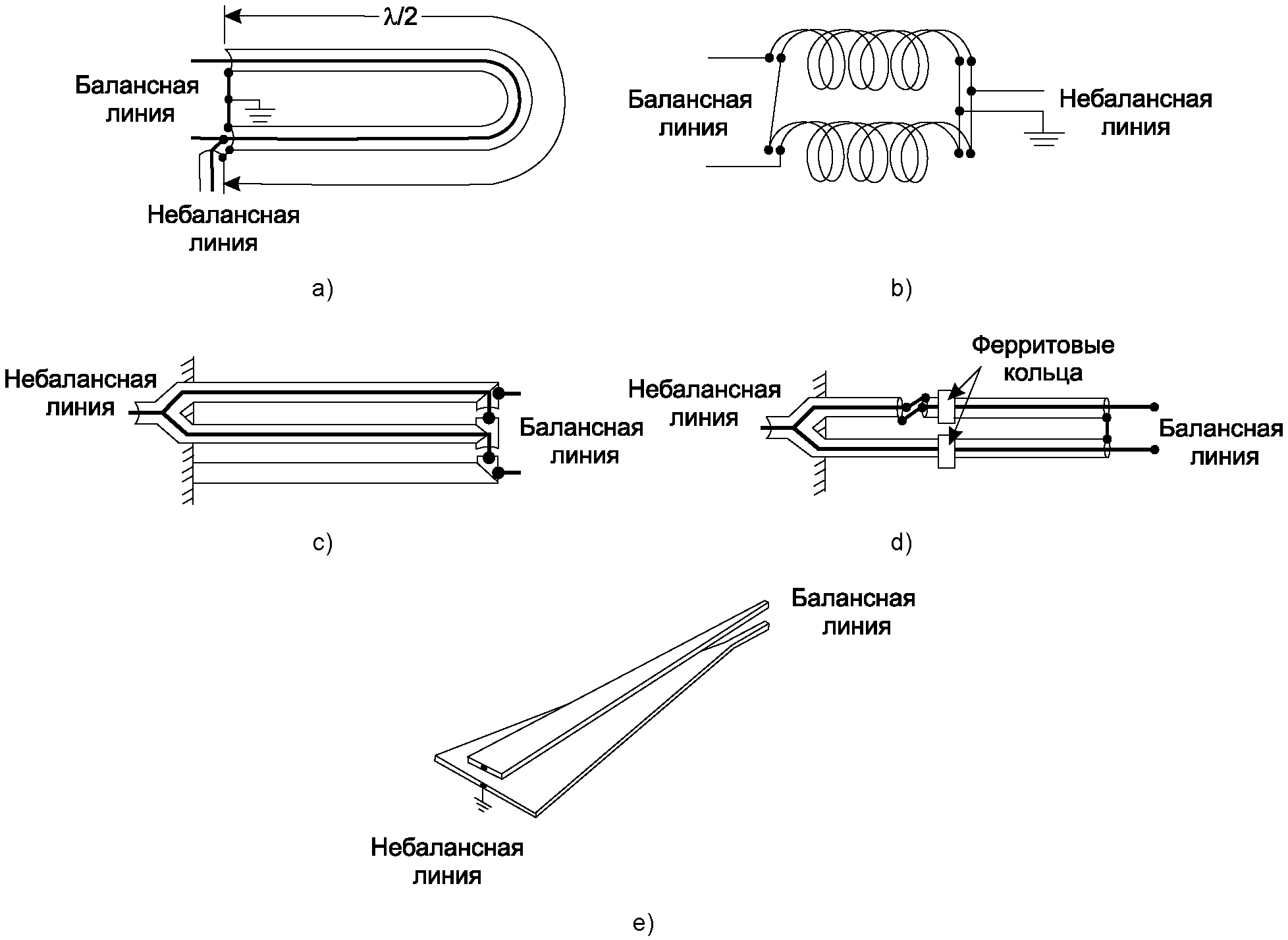
На рисунке 3 представлены электрические конфигурации нескольких различных типов устройств согласования. Устройство согласования, изображенное в части a) рисунка, построено из линии задержки  , и, как следствие, это узкополосное устройство согласования. Оно подключается между двумя зажимами балансной линии, как изображено на схеме, и заставляет линейные напряжения на землю быть равными и синфазными на расчетной частоте. С помощью этого устройства согласования достигается соотношение балансного к небалансному импедансу, равное 4.
, и, как следствие, это узкополосное устройство согласования. Оно подключается между двумя зажимами балансной линии, как изображено на схеме, и заставляет линейные напряжения на землю быть равными и синфазными на расчетной частоте. С помощью этого устройства согласования достигается соотношение балансного к небалансному импедансу, равное 4.
Остальные четыре устройства согласования на рисунке 3 работают в широком диапазоне частот. Устройство согласования, изображенное в части b) рисунка, сконструировано из спирально намотанных линий передачи, которые соединены параллельно на несимметричном конце. Достаточная длина линии используется для создания высоких импедансов, обеспечивающих заземление на противоположных концах катушек, где две линии соединены последовательно, образуя балансные зажимы. Это устройство согласования обеспечивает соотношение балансного и небалансного импедансов, равное 4.
Пример частотно-независимого устройства согласования приведен в части c) рисунка. Две коаксиальные линии подключаются параллельно на небалансном зажиме и последовательно на балансном зажиме. Для сохранения симметрии добавляется третий цилиндрический проводник. Коэффициент преобразования импеданса для этого устройства согласования, использующего два коаксиальных кабеля, равен 4. Параллельно можно добавить больше коаксиальных линий, чтобы получить коэффициенты преобразования импеданса 9, 16 и т.д.
Устройство согласования, изображенное в части d) рисунка, использует только два коаксиальных кабеля, у одного из которых внутренний и внешний проводники поменяли местами. Два ферритовых дросселя добавлены к коаксиальным внешним элементам для устранения синфазных токов.
Устройство согласования, изображенное в части e) рисунка 3, представляет собой устройство с очень широкой полосой пропускания, состоящее из конической линии передачи, которая постепенно преобразуется из небалансной линии в балансную линию. Длина переходного участка должна быть больше чем  при наименьшей необходимой частоте. В этом устройстве импеданс балансной (полосковой) и небалансной (коаксиальной) секций может быть различным, при этом медленное изменение от одной к другой обеспечивается геометрией переходной секции.
при наименьшей необходимой частоте. В этом устройстве импеданс балансной (полосковой) и небалансной (коаксиальной) секций может быть различным, при этом медленное изменение от одной к другой обеспечивается геометрией переходной секции.
Есть несколько практических деталей, которые необходимо учитывать при указании устройства согласования для использования в измерительной системе. К ним относятся следующие:
- пропускная способность устройства согласования;
- изменение уровня импеданса, если таковой имеется, от балансных портов к небалансным;
- эффективное "ослабление" уровня сигнала из-за установки устройства согласования;
- максимальная мощность устройства.
Эти данные обычно предоставляются производителем устройств согласования. Более полная информация, такая как частотная развертка пропускной способности сигнала устройства согласования (по величине и фазе), предоставляется редко, и, если эти характеристики необходимо включить в высокоточную модель в цепочке измерительных приборов, такие отклики должны измеряться пользователем.
устройств согласования [4b]
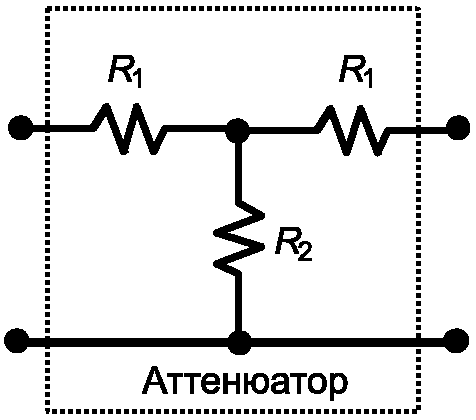
4.3.4 Аттенюаторы
Другим компонентом, изображенным в измерительной цепочке на рисунке 1, является аттенюатор. Иногда измеряемый сигнал может быть слишком сильным, и потребуется уменьшить его амплитуду, чтобы избежать перегрузки измерительного оборудования. Для этого будет использоваться аттенюатор.
Как изображено на рисунке 4, аттенюатор представляет собой резисторную схему лестничного типа, которая предназначена для обеспечения уменьшения амплитуды сигнала при одновременном поддержании постоянного импеданса, соответствующего линии. Как правило, они предназначены для использования в кабельных системах на 50 Ом, а ослабление указывается в дБ.
в измерительной цепи
Как и в случае с другими компонентами измерительной цепи, указанное ослабление устройства является только номинальным. На рисунке 5 представлено измеренное ослабление указанного аттенюатора на 20 дБ для системы на 50 Ом в диапазоне частот от 1 МГц до 1 ГГц. На этом рисунке не изображена соответствующая фаза коэффициента ослабления, которая также должна использоваться в любой сквозной модели измерительной цепочки.
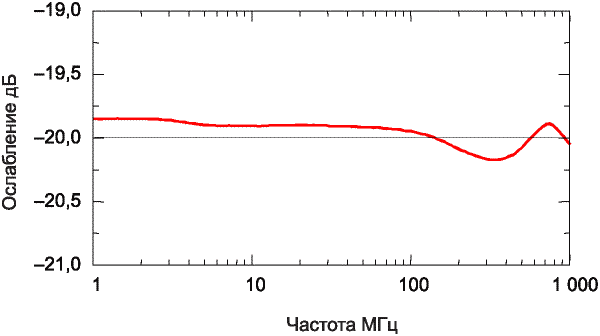
Рисунок 5 - Иллюстрация типичного ослабления
номинального аттенюатора на 20 дБ для системы на 50 Ом
в зависимости от частоты
При выборе аттенюатора для измерительной цепи должны использоваться следующие параметры:
- номинальное ослабление;
- значение импеданса для аттенюатора;
- максимальное рабочее пиковое напряжение (или мощность);
- эффективная пропускная способность устройства.
Как и в случае с устройством согласования, эти параметры обычно предоставляются производителем. Однако подробные частотные характеристики величины и фазы ослабления обычно не предоставляются, и их необходимо измерить.
Поскольку выходной отклик датчика производной (скорости нарастания) пропорционален скорости изменения измеряемой величины во времени, необходимо использовать интегратор для получения правильной формы сигнала тока. Такие интеграторы могут быть как пассивными, так и активными.
Примечание - Конечно, это интегрирование также может быть выполнено численно по измеренным производным данным. Однако выполнение этого может вызвать проблемы со сдвигами базовой линии, которые возникают из-за неопределенности в постоянной составляющей измеряемого поля.
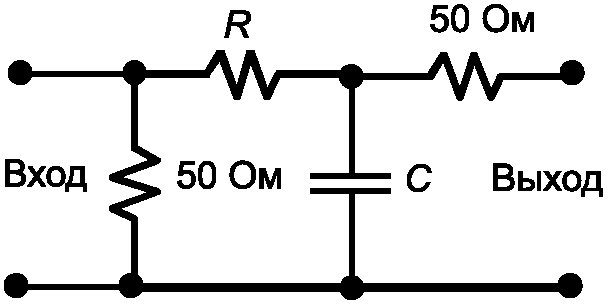
Пассивный интегратор по сути представляет собой резистивно-емкостную цепь, как изображено на рисунке 6. Эти компоненты наиболее подходят для импульсов большой амплитуды с быстрым нарастанием времени, поскольку они требуют высокого напряжения от производного датчика для обеспечения приемлемой точности выходного отклика. Кроме того, низкочастотная чувствительность такой измерительной системы (производный датчик плюс интегратор) является низкой. Как правило, такие интеграторы использовались с ВЭМИ и оборудованием для испытаний на напряжение молнии, а также с измерениями рельсотроном или рельсовым ускорителем. Заметным преимуществом этих компонентов является то, что они пассивны и не требуют внешнего питания.
встроенного интегратора
Пассивный интегратор описывается своей постоянной времени (RC), где R - интегрирующий резистор, а C - интегрирующий конденсатор. При использовании различных значений R и C характеристики всего преобразователя (производный датчик плюс интегратор) могут варьироваться в огромном диапазоне. Например, типичную гибкую катушку можно использовать для измерения тока от нескольких мА до более чем 1 МА, просто изменив эти два компонента в интеграторе. Передаточная функция для напряжений на входе и выходе интегратора обычно описывается выражением
 . (12)
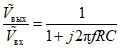
. (12)Общие постоянные времени RC равны 1, 5, 10 и 100 мкс. Номиналы R равны 1, 5, 10 и 100 кОм соответственно, а C равно 1,0 нФ. Указанное сопротивление нагрузки для таких интеграторов обычно является нагрузкой с высоким сопротивлением (сопротивление > 1 МОм, емкость < 10 пФ). Многие измерительные устройства имеют только входное сопротивление 50 Ом, и, если эти последние компоненты используются с интегратором, отклики будут некорректными. Пользователь должен быть уверен, что используется устройство для измерения высокого импеданса. На рисунке 7 представлена величина отношения передаточной функции интегратора |Vвых/Vвх| для вышеупомянутых временных констант интегратора с частотным диапазоном действия интегрирования, изображенным на рисунке.
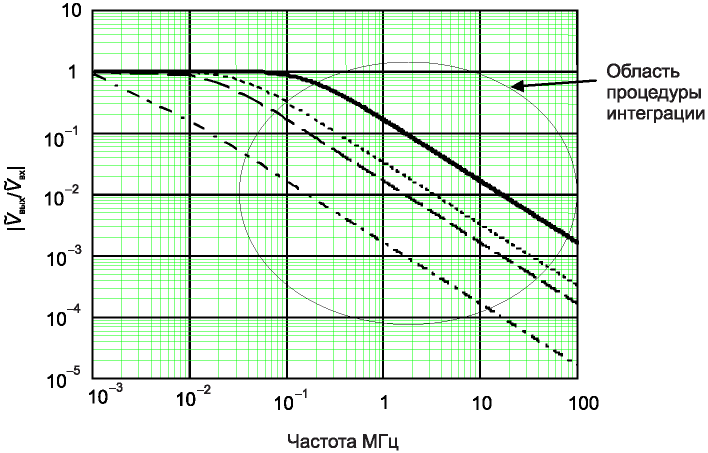
Рисунок 7 - График передаточной функции
интегрирующей схемы на рисунке 6
Активные интеграторы, как правило, гораздо более универсальны, чем пассивные интеграторы. Они могут использоваться как при малых токах (менее 1 А), так и на низких частотах (менее 0,1 Гц), а также при токах более 1 МА и на частотах, приближающихся к 100 МГц. Низкочастотные характеристики этого интегратора определяются конструкцией интегратора.
4.3.6 Соединяющие линии передачи
Как отмечено на рисунке 1, различные компоненты измерительной цепочки могут быть соединены между собой либо коаксиальным кабелем, либо оптоволоконной линией передачи. Оба этих пути передачи также влияют на измеряемый сигнал, и в идеале они должны быть включены в любую коррекцию, вносимую в измеряемый сигнал. В идеале эти сигнальные тракты предназначены для работы без ослабления или искажения сигнала, но на практике использование этих компонентов влияет на качество сигнала.
4.3.6.1 Подключение по коаксиальному кабелю
Учитывая путь передачи по коаксиальному кабелю, могут быть потери в металлических проводниках кабеля и диэлектрические потери. Последствия этих потерь заключаются в обеспечении частотно-зависимого сигнала в кабеле, и это приводит к ослаблению волны, проходящей по линии, и в большинстве случаев к дисперсии формы сигнала. Иными словами, форма бегущей волны будет расширяться и искажаться по мере ее распространения по линии.
В то время как такие эффекты потерь могут быть вычислены с использованием соответствующих моделей для коаксиального кабеля, определение характеристик кабеля с помощью измерений является более точным, поскольку частотно-зависимые характеристики диэлектрической проницаемости и проводимости кабеля обычно неизвестны. В качестве примера некоторых типичных потерь в кабеле в зависимости от частоты на рисунке 8 представлены измерения передачи на единицу длины (в единицах дБ/м) для "обычного" коаксиального кабеля и высококачественного медного кабеля, который больше подходит для высокочастотных измерений. Стоит обратить внимание, что в обоих случаях наблюдается уменьшение передачи (например, увеличение ослабления) кабеля, поскольку частота увеличивается. Как и в случае с другими компонентами измерительной цепи, эта функция передачи действительно является величиной с комплексным значением, и эта сложная функция должна использоваться для учета эффектов ослабления кабеля в общей измерительной цепи.
 Стандартный коаксиальный кабель (нижняя кривая)
Стандартный коаксиальный кабель (нижняя кривая) Полужесткий коаксиальный кабель (верхняя кривая)
Полужесткий коаксиальный кабель (верхняя кривая)Рисунок 8 - Иллюстрация частотно-зависимой передачи сигнала
на единицу длины стандартного коаксиального кабеля
и полужесткой коаксиальной линии
4.3.6.2 Оптоволоконная линия связи
Альтернативой коаксиальному, или "жесткому", соединению оборудования в измерительной цепочке является оптоволоконное соединение. Как отмечено на рисунке 1, оно состоит из преобразователя, который преобразует электрический сигнал в оптический сигнал (передатчик), оптоволоконного кабеля, который передает оптический сигнал на некоторое расстояние, и другого преобразователя (приемник), который преобразует оптический сигнал обратно в электрический сигнал. Преимущество этой системы заключается в том, что оптоволоконный кабель в принципе непроводящий. Это устраняет возможный непреднамеренный путь распространения сигнала, который бы присутствовал, если бы использовалась коаксиальная линия, тем самым уменьшая влияние, которое измерительная система оказывает на нормальную электромагнитную обстановку вблизи измерительной цепи.
Примечание - Некоторые оптоволоконные кабели имеют внешнюю броню из проводящего материала для физической защиты. При измерениях ЭМСВМ следует избегать использования кабелей такого типа.
Хотя использование оптоволоконных линий связи обеспечивает определенные преимущества в электрической изоляции измерительного оборудования, его использование может вызвать некоторые проблемы. Преобразователям, как правило, требуется внешнее питание в виде батарей, и это может привести к нежелательным перерывам в измерительной процедуре, когда батареи нуждаются в замене. Однако более серьезным является то, что оборудование преобразователя увеличит системный шум и уменьшит полосу пропускания измерительной цепочки.
4.3.7 Записывающее оборудование
Переходные сигналы ЭМСВМ обычно измеряются с помощью цифрового осциллографа или преобразователя формы сигнала в цифровую форму. Дополнительные требования к данному оборудованию приведены в IEC 61000-4-25 (пункты 6.1.2 и 6.2.2).
4.3.8 Расположение оборудования
Важная проблема при выполнении измерений ЭМСВМ заключается в компоновке измерительного оборудования. Как упоминалось в 4.1, датчик электромагнитного поля всегда будет возмущать наведенное поле. Это неизбежное следствие изменения поля. Однако калибровка датчика учитывает это возмущение поля, и выходной сигнал датчика в конечном итоге обеспечивает отображение наведенного поля.
Реалистичная измерительная система имеет другие компоненты помимо датчика (см. рисунок 1), и, если они металлические, у них есть возможность взаимодействовать с наведенным полем и обеспечивать дополнительные компоненты электромагнитного поля на датчике. Таким образом, присутствие этих компонентов может нарушать локальное поле, измеряемое датчиком, и приводить к ошибкам в измеренных откликах.
Взаимодействие наведенного поля с другими компонентами в цепочке измерений также может повлиять на функционирование самих компонентов. Рассмотрим случай наведенного поля, действующего на коаксиальный кабель, который передает измеренный сигнал от датчика к регистратору. Это внешнее поле может индуцировать токи на внешней стороне кабеля, и благодаря сопротивлению экрана и проводимости во внутреннем сигнальном проводе может быть наведен источник напряжения. Этот источник фактически является источником "шума" или помех, и он изменяет сигнал датчика, передающийся по кабелю. Такие помехи могут быть устранены несколькими способами, включая использование лучшего экрана на коаксиальном кабеле, прокладку кабеля таким образом, чтобы исключить внешнюю электромагнитную связь с кабелем, путем добавления ферритовых элементов на кабель снаружи или с помощью оптоволокна вместо коаксиального кабеля.
В дополнение к взаимодействию с окружающей средой электромагнитного поля и возмущению наблюдаемой реакции цепочка измерений может влиять на измерения другими способами. Например, рассмотрим датчик тока в кабеле, изображенный на рисунке B.7. Наличие этого датчика вблизи кабеля может нагружать кабель элементом эффективного импеданса и тем самым вызывать уменьшение тока в кабеле. Таким образом, хотя ток считывается датчиком "формально" правильно, это не тот ток, который протекал бы по кабелю, если бы датчика там не было. Другим примером является измерение составляющей поля с высокой добротностью (например, в реверберационной камере).
В этом случае датчик нагружает камеру, что приводит к более низкому глобальному уровню поля (т.е. не только вблизи датчика), чем тот, который был бы обнаружен без датчика в камере. Опять же, измеряется истинный уровень поля, но не тот уровень поля, который был до введения датчика.
Ряд практических рекомендаций относительно позиционирования датчиков и кабелей был представлен в [6], и они кратко изложены здесь. Важным соображением при размещении датчиков, кабелей и оборудования является то, должно оказываться минимальное воздействие на измеряемые поля. Электрический кабели, соединяющие датчики свободного поля с измерительной цепочкой, могут значительно искажать измеряемое поле (если не используется оптоволокно), и такие типы измерений не рекомендуются. Рекомендуется использовать установленный на поверхности датчик тока или заряда на проводящей поверхности, которая является компонентом испытываемого объекта. Таким образом, кабели датчиков могут быть проложены к измерительному оборудованию по кабелям в нижней части плоскости заземления, где электромагнитные поля очень малы. Такая конфигурация кабелей изображена на рисунке 9, a).
Аналогичным образом, когда требуется ток или заряд на цилиндрическом или трубчатом проводнике, кабели должны быть проложены внутри проводника, как изображено на рисунке 9, b). Для измерения тока внутри такой цилиндрической области должна применяться конфигурация, изображенная на рисунке 9, c).
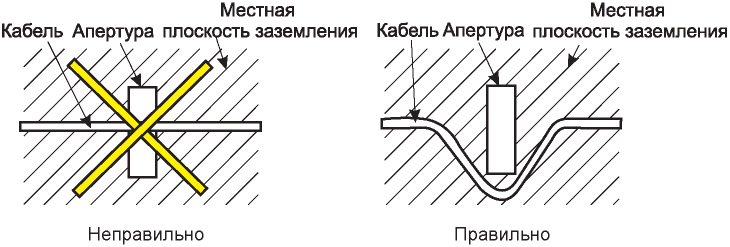
Однако иногда прокладка кабеля через локальную плоскость заземления в область, свободную от поля, может оказаться невозможной. В этом случае кабели должны монтироваться во внешней области (с большой напряженностью электромагнитного поля), но с особым вниманием к прокладке и присоединению кабелей к плоскости заземления. Для датчика поверхностного монтажа, как изображено на рисунке 10, a), экран кабеля, соединяющего датчик и измерительное оборудование, должен быть электрически прикреплен (с помощью медной клейкой ленты) к плоскости заземления. Кроме того, монтажная пластина датчика должна быть прикреплена к плоскости заземления.
При измерении тока или напряжения в кабеле должны использоваться конфигурации кабелей, изображенные на рисунке 10, b) и c). В обоих случаях экран кабеля снова соединяется с локальной плоскостью заземления, и участок кабеля, идущий от плоскости заземления к кабелю, должен быть сделан как можно короче. В дополнение к соединению кабеля с плоскостью заземления также можно рассмотреть возможность размещения ферритовых колец поверх экрана кабеля в удобных местах вдоль кабеля, чтобы уменьшить нежелательный ток на внешней стороне кабеля. Это изображено на рисунке 10, b).
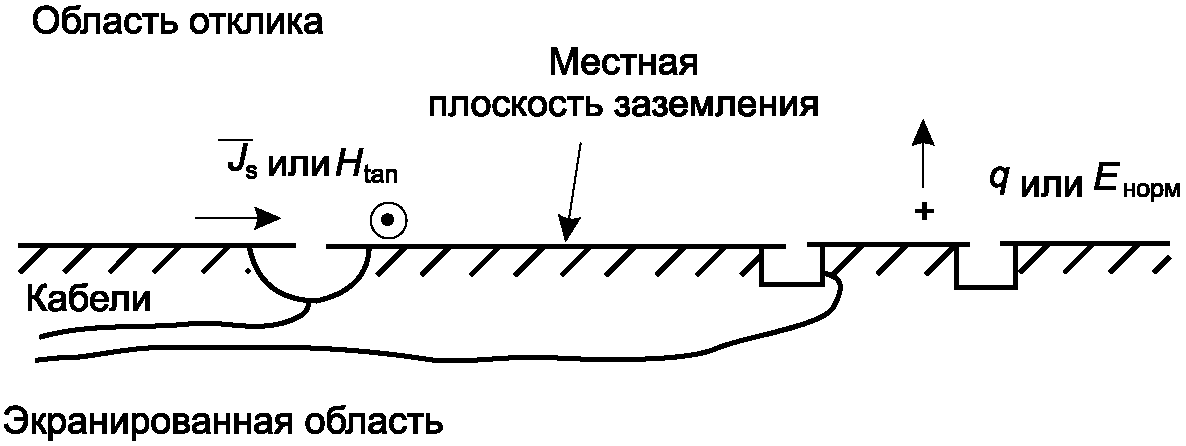
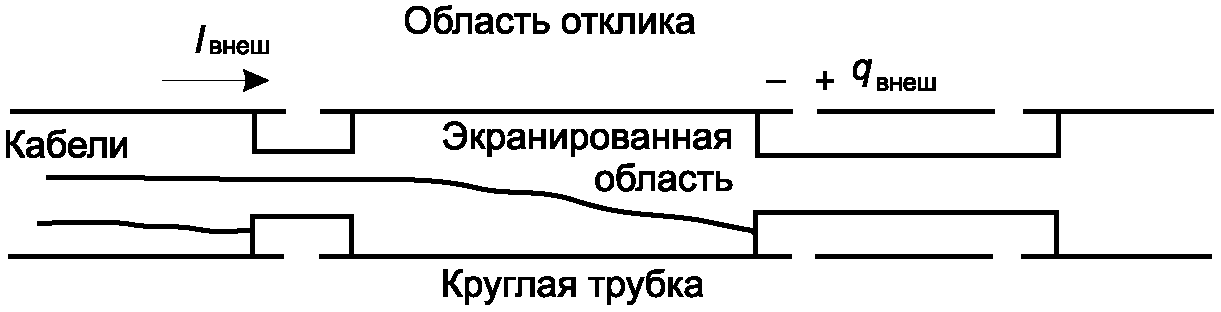
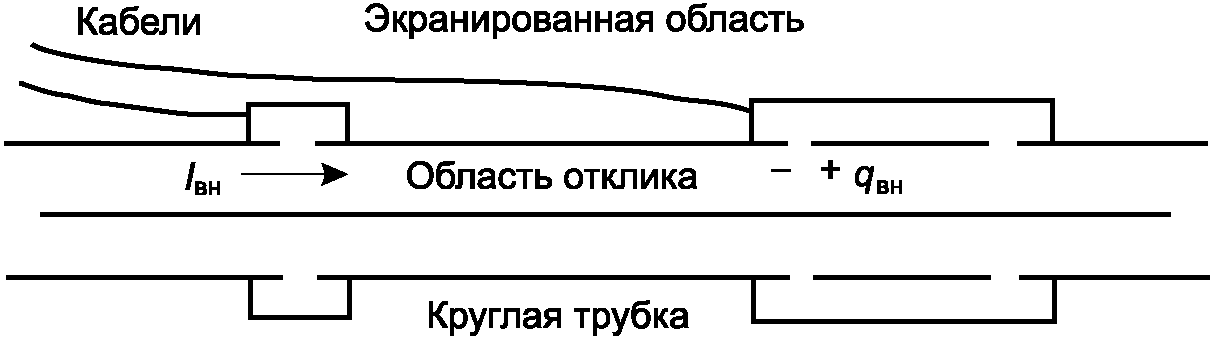
Рисунок 9 - Иллюстрация прокладки кабеля датчика в областях,
не содержащих электромагнитных полей
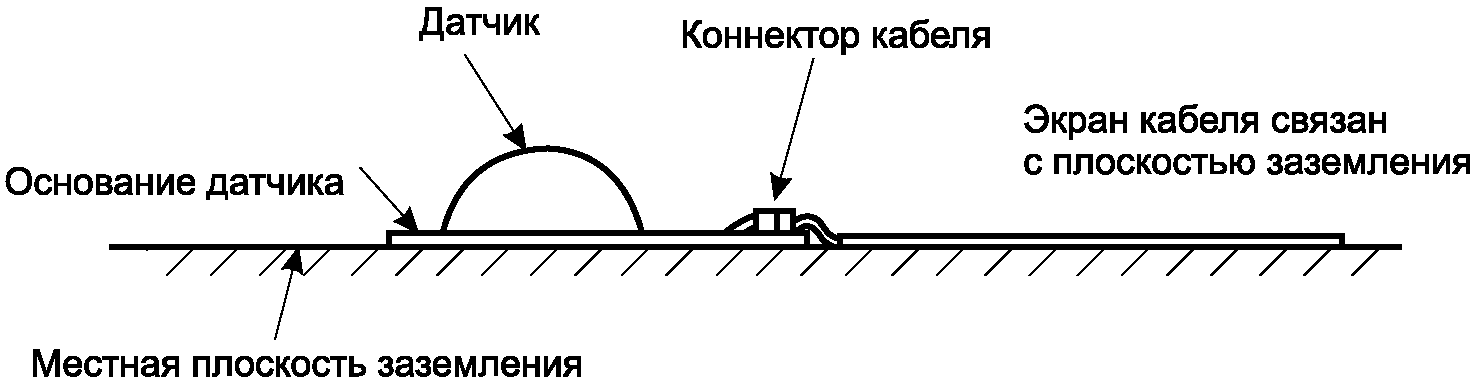
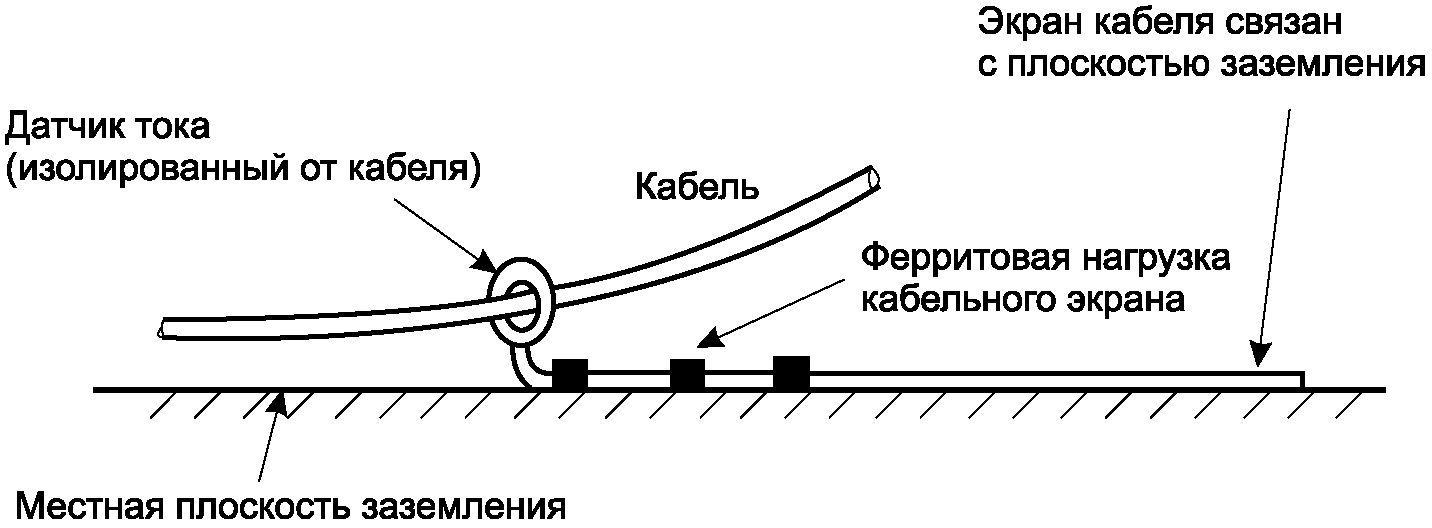
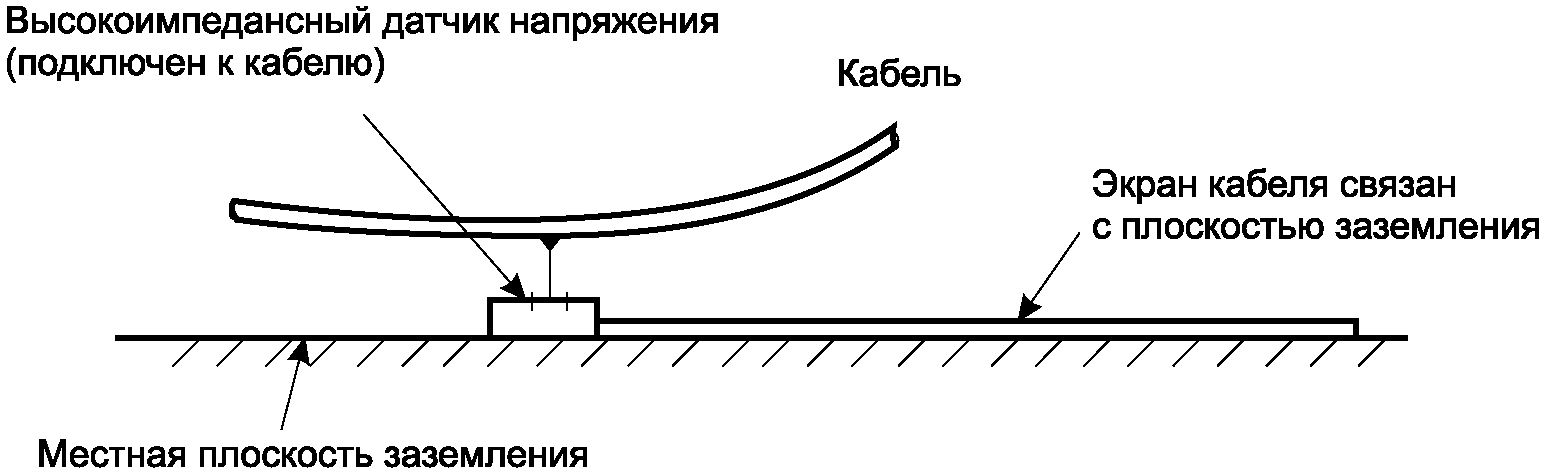
Рисунок 10 - Обработка кабелей датчиков при расположении
в области, содержащей электромагнитные поля
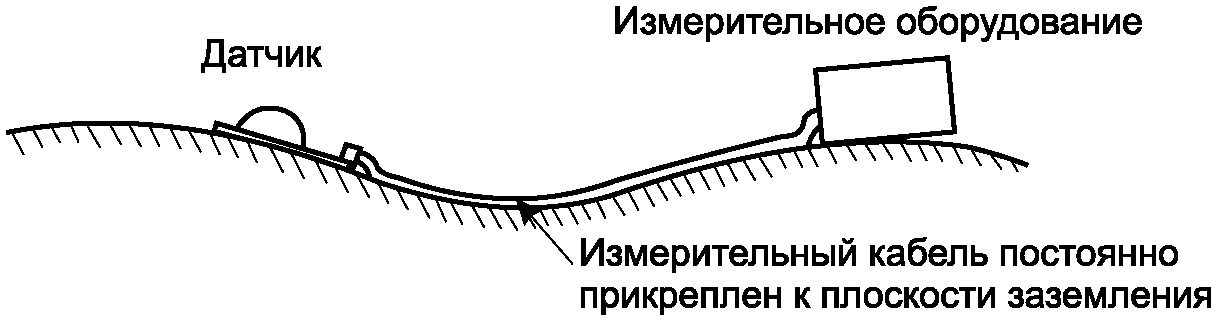
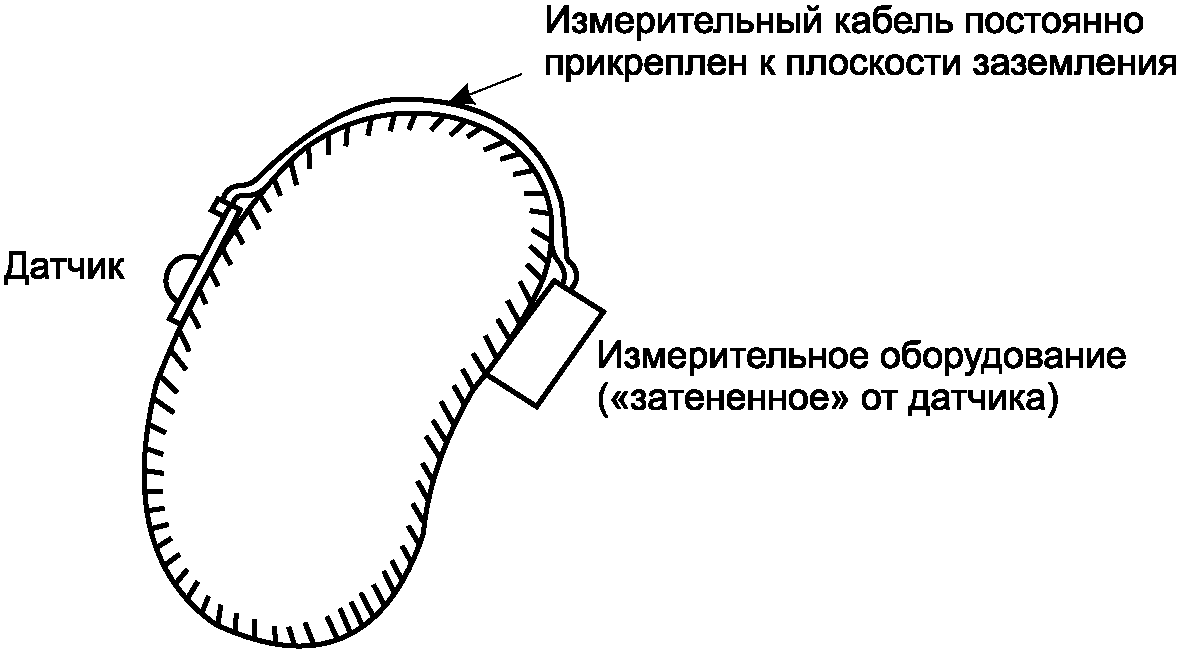
В реальных системах локальная плоскость заземления может быть неидеально плоской, как изображено на рисунке 11, a). В этих случаях кабель должен быть смонтирован соответствующим образом на локальном заземлении с электрическим соединением, по возможности между экраном кабеля и поверхностью. Дополнительная возможность избежать возмущений электромагнитного поля измерительным оборудованием изображена на рисунке 11, b). Здесь измерительное оборудование расположено в области, которая эффективно изолирована от датчика испытываемым объектом. Конечно, экран кабеля должен быть прикреплен к поверхности.
Примечание - Большие крестики на рисунках слева указывают на неправильную прокладку кабеля.
На рисунке 12 изображено несколько конфигураций прокладки кабеля, которых следует избегать при измерениях. На рисунке 12, a) изображен кабель, проходящий близко к отверстию в стенке измеряемой системы. Электромагнитные поля, проходящие через отверстие, будут возбуждать экран кабеля, и это может привести к нежелательным откликам в измерительной системе. Аналогично на рисунке 12, b) кабель может проходить от измеряемого оборудования к другому, не будучи прикрепленным к поверхностям. Это создает большой контур, который может связываться с электромагнитными полями вблизи оборудования, тем самым вызывая ложные отклики при измерениях.
локальной геометрии
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
оборудования на работу датчика
Рисунок 11 - Соответствие кабелей
экранированной топологии локальной системы
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
Примечание - Большие крестики на рисунках слева предназначены для указания на неправильную прокладку кабеля.
прокладки кабеля
Требования к процедурам измерений приведены в IEC 61000-4-25 (раздел 8). Приложение C содержит дополнительную информацию, касающуюся процедур измерения ЭМСВМ.
Низкочастотные сигналы, имеющие спектральные составляющие порядка нескольких Герц, также представляют интерес для измерений ЭМСВМ. Эти сигналы возникают в условиях ЭМИ позднего времени, которые аналогичны электрическим и магнитным полям на поверхности земли, создаваемым геомагнитными бурями.
Поскольку условия ЭМСВМ настолько похожи на эти естественные возмущения, можно использовать многие из тех же методов измерения, которые используются для оценки эффектов геомагнитных бурь. Они включают измерения переходного поведения магнитных полей на поверхности земли, а также напряжения и токи в длинных проводниках, которые соединены с землей. В разделе B.9 рассматриваются различные аспекты датчиков, которые подходят для проведения таких низкочастотных измерений.
Калибровка измерительного канала может быть достигнута несколькими методами, начиная от очень точных измерений, которые можно проследить до стандартных электромагнитных полей, и заканчивая приближенными схемами, которые требуют простых коэффициентов ослабления и других скалярных чисел для описания компонентов в системе. В этом разделе описываются общие процедуры калибровки, но не описываются методы калибровки в деталях.
Требование к использованию одного метода вместо другого зависит от типа выполняемого измерения. Например, если испытание уровня излучаемого излучения рассматривается для проверки в соответствии со спецификацией по электромагнитной совместимости, то нет необходимости проводить фазово-когерентное измерение. Кроме того, для многих применений может быть допустим набор функций калибровки постоянной величины. С другой стороны, если требуется измерение переходного процесса ЭМСВМ с быстрым нарастанием или, наоборот, если требуется измерение широкополосной непрерывной волны для восстановления переходной характеристики ЭМСВМ, крайне важно, чтобы при измерениях сохранялась информация как о величине, так и о фазе. Это означает, что любые функции калибровки должны иметь комплексное значение.
К сожалению, у большинства датчиков электромагнитного поля и других компонентов измерительной цепочки производители указывают только амплитуду комплексной передаточной функции. Кроме того, некоторые общедоступные измерительные программы не допускают возможности использования комплексных передаточных функций или поправочных коэффициентов. Пользователям этого оборудования и программного обеспечения рекомендуется тщательно изучить свои требования к проведению испытания, чтобы убедиться, что использование этих данных не приведет к неоправданным ошибкам в результатах испытания.
Существует два основных подхода к калибровке измерительной цепочки. Один из них заключается в том, чтобы рассмотреть всю цепочку как единый компонент и выполнить калибровочное измерение для этой цепочки. Другой подход заключается в разработке модели калибровочной цепи, состоящей из датчика, аттенюаторов, фильтров, линий передачи и т.д., и независимой калибровке каждого компонента. Затем отдельные коэффициенты калибровки могут быть объединены аналитически для обеспечения общей функции калибровки для всей цепочки измерений.
В этом разделе описываются вышеупомянутые концепции калибровки.
Для калибровки всей цепочки измерений можно использовать несколько различных подходов. Для калибровки единой измерительной цепочки, подобной той, что изображена на рисунке 1, простейшим подходом является размещение датчика в среде известного электромагнитного поля и запись показаний детектора. Изменяя частоту электромагнитной среды, можно определить частотную зависимость (как по величине, так и по фазе) калибровки.
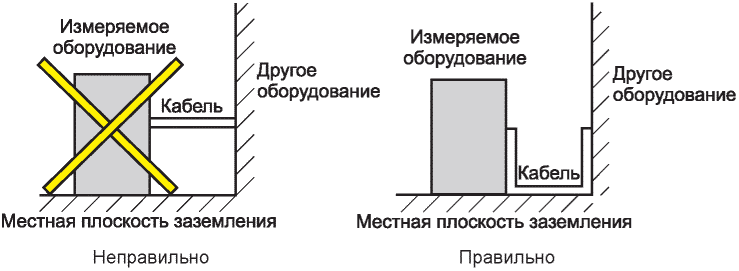
Однако основная трудность этого метода заключается в том, что трудно получить "стандартную" электромагнитную обстановку без наличия измерительной системы, которая уже откалибрована. Одним из способов создания такого стандартного поля является использование волноводноподобной структуры, для которой внутреннее электромагнитное поле может быть легко рассчитано на основе знания геометрии и входной радиочастотной (РЧ) мощности, подаваемой на вход. Двусторонняя TEM-камера является примером такой волноводной структуры. Это устройство похоже на коаксиальную линию передачи, с источником на одном конце и согласованной нагрузкой на другом. Источник создает поперечное электромагнитное поле (ТЭМ) внутри коаксиальной линии, которая взаимодействует с испытываемым объектом, расположенным внутри коаксиальной области, и в конечном счете поглощается конечным импедансом.
На рисунке 13 приведена типичная двусторонняя TEM-камера, с разрезом, показывающим центральный проводник коаксиальной системы и испытательный объем. До тех пор пока испытываемый объект (т.е. эталонный датчик, подлежащий калибровке) не слишком велик по сравнению с поперечным сечением ячейки, поле возбуждения можно считать приблизительно однородным. Поскольку режим TEM в этом волноводе не имеет низкочастотного среза, калибровка может проводиться на очень низких частотах - значительно ниже частот, допускаемых излучающей антенной структурой. Однако с увеличением частоты работы могут возникать другие режимы и резонанс, которые эффективно ограничивают использование высокочастотного устройства для целей калибровки. Поставщики отдельных TEM-камер предоставляют информацию об используемых полосах пропускания их оборудования, которые обычно варьируются от нескольких десятков кГц до 100 МГц для ячеек, имеющих рабочий объем порядка метра в высоту. Дополнительная информация о TEM-камерах приведена в IEC 61000-4-20.
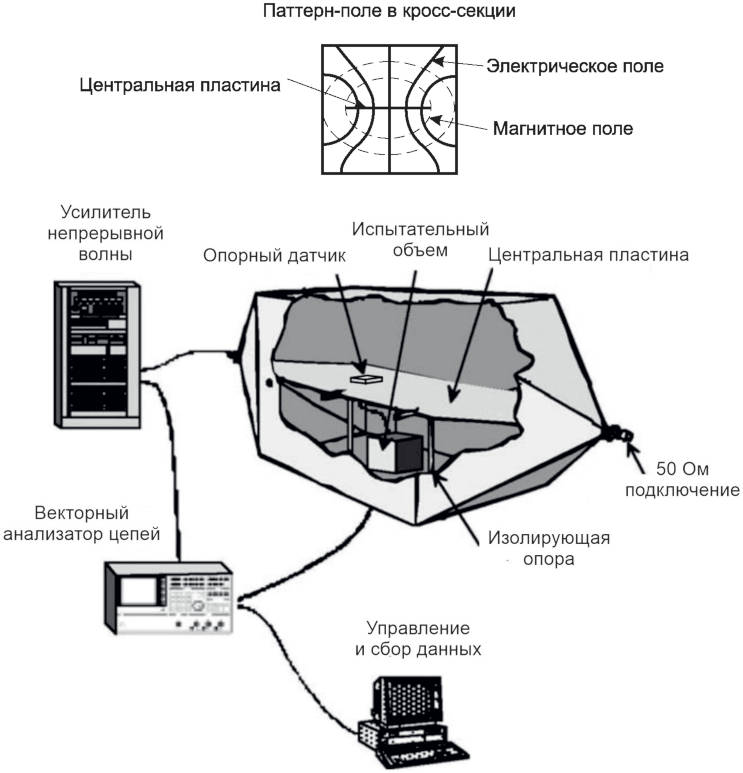
Рисунок 13 - Двусторонняя ячейка TEM для обеспечения
равномерного освещения поля при калибровке датчика
Альтернативой двусторонней TEM-камере, описанной выше, является коническая TEM-камера, как изображено на рисунке 14. В этой испытательной камере внутренний проводник смещен вертикально, чтобы создать больший испытательный объем, и он имеет постепенно расширяющееся прямоугольное коаксиальное поперечное сечение, заканчивающееся согласованной нагрузкой.
Наконечник состоит из комбинированного низкочастотного контурного элемента сопротивлением 50 Ом и стенки высокочастотного поглотителя для поглощения падающей распространяющейся волны, как в безэховых камерах. Переход между этими двумя режимами зависит от размера ячейки и длины поглотителя. Согласованная широкополосная нагрузка с импедансом, обеспечиваемая наконечником, действует для подавления более высоких модов. Поглощающий материал значительно увеличивает потери в полости камеры, тем самым снижая резонансные эффекты. Однородность поля внутри пустой камеры может составлять менее нескольких дБ для частот от постоянного тока до 1 ГГц (см. IEC 61000-4-20).
Были построены камеры высотой от 0,5 до более 3 м для использования при испытаниях печатных плат и оборудования размером с коробку. В настоящее время изучаются большие камеры, способные испытывать стойки или транспортные средства. Калибровка измерительной цепи в этих односторонних TEM-камерах идентична той, которая обсуждалась для обычной ячейки TEM, за исключением того, что верхний диапазон частот выше. Следовательно, используется аналогичное оборудование (но, возможно, с большей пропускной способностью).

и связанного с ней оборудования
Такие калибровочные камеры не обязательно должны быть чрезвычайно большими. Например, на рисунке 15 изображено небольшое испытательное устройство, предназначенное для калибровки отдельных измерительных каналов с частотой примерно от 30 МГц до 1 ГГц. Стоит обратить внимание, что, хотя TEM-камера хорошо работает на низких частотах, ограничение в 30 МГц связано с плохим откликом датчика на низких частотах.
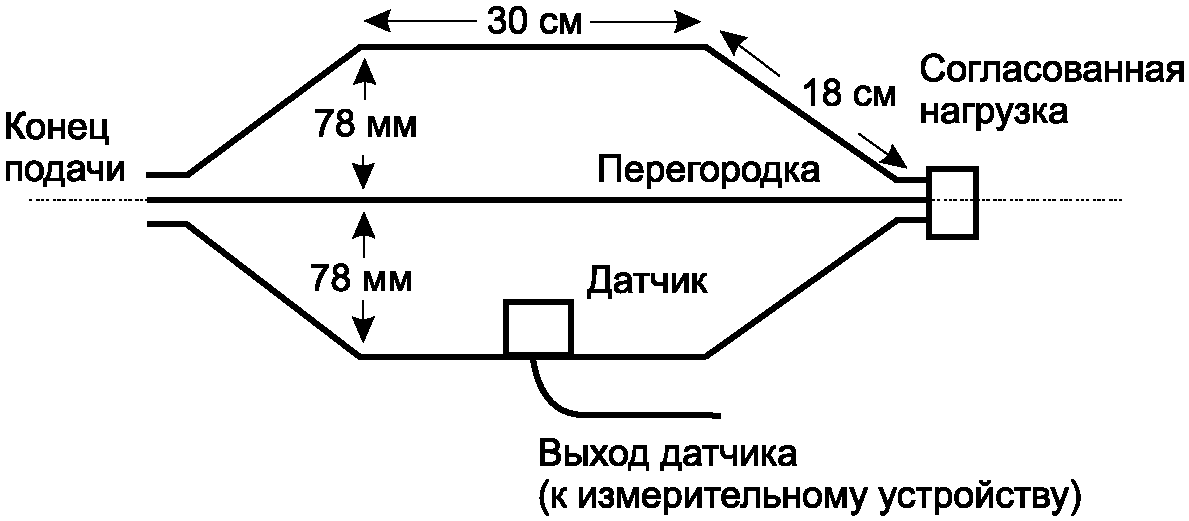
Рисунок 15 - Размеры небольшого испытательного
приспособления для калибровки датчика
6.1.2 Относительная калибровка двух измерительных каналов
В случае когда необходимо измерить передаточные функции, калибровку двух измерительных цепей проводить намного проще, поскольку точное знание условий электромагнитного поля возбуждения не требуется. Для выполнения этой калибровки два датчика измерительных цепей сдвигаются так, чтобы они измеряли одну и ту же электромагнитную обстановку, и измеряется соотношение откликов. Если две измерительные цепочки идеально откалиброваны, соотношение этих двух передаточных функций равно единице. Однако если одна из цепочек не откалибрована, соотношение будет отличаться от единицы, и это соотношение определяет зависящую от частоты функцию калибровки для этой цепочки.
Этот процесс калибровки работает до тех пор, пока в спектре нет существенных нулей. Если существует нуль, например, как в случае возбуждения электрического поля на определенной высоте над землей, где существует деструктивная интерференция от поля, отраженного от земли, в функции калибровки будут ошибки. Таким образом, необходимо соблюдать осторожность при получении достаточно однородного спектра поля возбуждения.
Кроме того, следует позаботиться о том, чтобы обеспечить минимальное взаимодействие между двумя измерительными датчиками при их сближении для получения калибровочного коэффициента.
Альтернативный подход к калибровке измерительной цепи заключается в изучении состава цепи и описании электрических характеристик каждого из ее компонентов таким образом, чтобы поведение всей измерительной цепочки можно было определить путем объединения данных от компонентов. В качестве примера измерительная цепочка, показанная на рисунке 1, может быть электрически представлена сетью линий передачи, изображенной на рисунке 16.
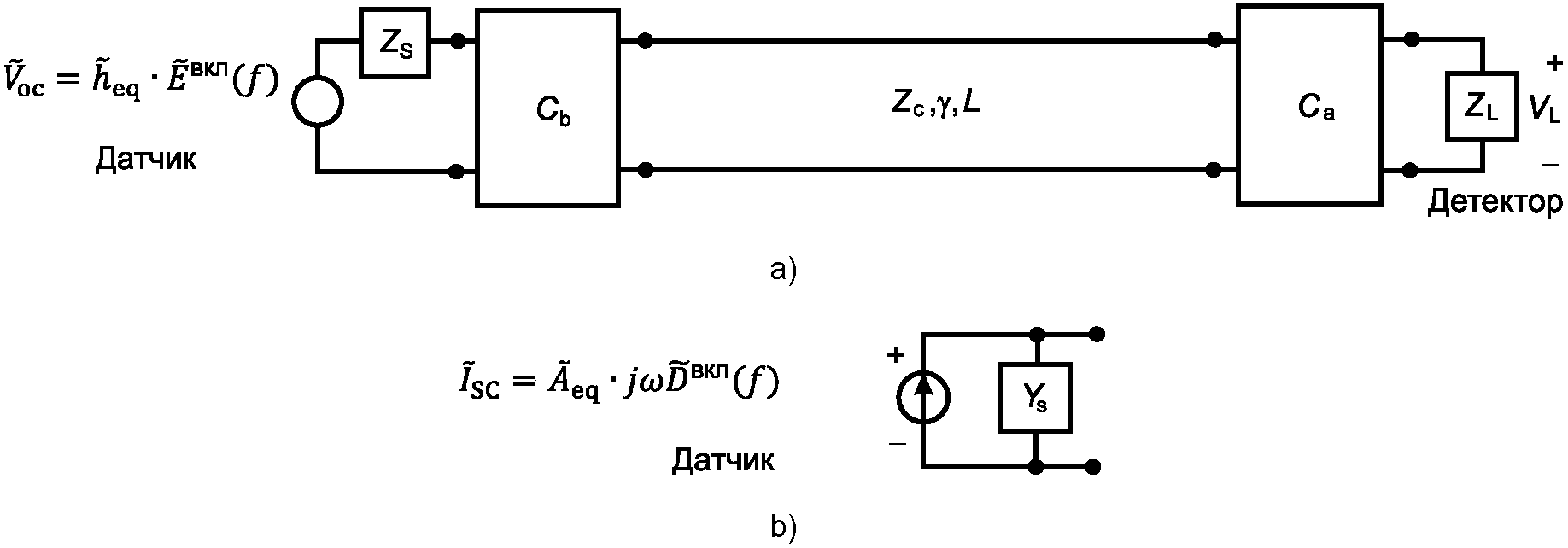
a) с датчиком электрического поля, представленным общей
схемой Тевенина, и b) эквивалентной схемой Нортона
для того же датчика
В сети, изображенной на рисунке 16, датчик электромагнитного поля представлен разомкнутой схемой Тевенина, включающей напряжение  , которое связано с падающим электрическим полем через эффективную высоту
, которое связано с падающим электрическим полем через эффективную высоту  , как:
, как:

вместе с входным сопротивлением датчика  . В самом общем случае
. В самом общем случае  и
и  - это комплексные частотно-зависимые функции, характер которых зависит от конструкции используемого датчика.
- это комплексные частотно-зависимые функции, характер которых зависит от конструкции используемого датчика.
В качестве альтернативы датчик может быть представлен эквивалентной схемой Нортона, изображенной на рисунке 16, b) через эквивалентную площадь (или апертуру) датчика  , поле смещения
, поле смещения  , возбуждающее датчик, и входной допуск
, возбуждающее датчик, и входной допуск  . Как обсуждалось Баумом [6], набор двойственных выражений доступен для датчиков магнитного поля, и общие обсуждения работы датчика здесь для датчиков электрического поля будут применимы и к датчикам магнитного поля. Подробные сведения об этих параметрах датчика были описаны в 4.3.2.
. Как обсуждалось Баумом [6], набор двойственных выражений доступен для датчиков магнитного поля, и общие обсуждения работы датчика здесь для датчиков электрического поля будут применимы и к датчикам магнитного поля. Подробные сведения об этих параметрах датчика были описаны в 4.3.2.
, возбуждающее датчик, и входной допуск . Как обсуждалось Баумом [6], набор двойственных выражений доступен для датчиков магнитного поля, и общие обсуждения работы датчика здесь для датчиков электрического поля будут применимы и к датчикам магнитного поля. Подробные сведения об этих параметрах датчика были описаны в 4.3.2.Значительная путаница возникает при испытании из-за различных способов определения калибровочных коэффициентов для измерительных датчиков. Когда производитель указывает калибровочный коэффициент для датчика, должно быть четко указано, как именно определяется этот коэффициент и как он должен использоваться в процессе измерения.
Когда датчик поля представлен так, как описано в 6.2.1, наиболее общая процедура калибровки сводится к определению двух комплексных функций - эквивалентной высоты и входного импеданса - как функции частоты в необходимой полосе частот. Если датчик нагружен изнутри или известно его поведение при нагрузке с известным фиксированным импедансом, тогда требуется только информация об отклике по напряжению при нагрузке, которая приведена с точки зрения модифицированной эквивалентной высоты  .
.
Определение этих величин может быть произведено либо экспериментально, либо аналитически, как описано ниже.
6.2.2.1 Калибровка датчика с помощью линейки
В некоторых случаях можно получить калибровочные коэффициенты датчика поля, используя аналитические методы [5]. Для определенных форм проводников (например, сферы или сфероида) можно получить аналитическое выражение для напряжения разомкнутой цепи и входного импеданса, решив классическую задачу рассеяния. Хотя эти решения могут быть довольно сложными и иметь сильное изменение частоты, если предположить, что датчик электрически мал, можно продемонстрировать, что напряжение датчика может быть задано, как в уравнении (13), при этом параметр  задается выражением замкнутой формы. Это было названо калибровкой по линейке, потому что все, что необходимо для определения чувствительности датчика, в принципе это измерение его размеров (плюс, конечно, аналитические выражения, дающие отклик).
задается выражением замкнутой формы. Это было названо калибровкой по линейке, потому что все, что необходимо для определения чувствительности датчика, в принципе это измерение его размеров (плюс, конечно, аналитические выражения, дающие отклик).
Такая калибровка с помощью линейки полезна из-за своей простоты, но использование этого метода может иметь несколько недостатков. Это:
- только ограниченное количество датчиков может быть аналитически откалибровано таким образом;
- частотный диапазон действия калибровки ограничен размером датчика и не предусмотрено превышение максимальной частоты срабатывания;
- данная процедура калибровки не учитывает возможные производственные дефекты, которые могут привести к неидеальному отклику датчика.
Для датчиков, которые не могут быть откалиброваны с помощью таких аналитических средств, можно измерить соответствующие калибровочные коэффициенты на низких частотах. До тех пор пока соблюдаются низкочастотные ограничения, такие датчики могут быть описаны двумя скалярными коэффициентами, которые могут быть измерены на любой частоте в пределах рабочей полосы пропускания.
Альтернативный метод калибровки датчика заключается в сравнении его отклика в неизвестной электромагнитной обстановке с откликом другого, ранее откалиброванного датчика [5]. Этот процесс приводит к тому, что часто называют калибровкой, прослеживаемой до некоторого принятого стандарта. При выполнении такого типа калибровки важно поддерживать эталонный датчик в чистом и неповрежденном физическом состоянии, поскольку любая ошибка в его отклике может привести к ошибкам в функции калибровки.
6.2.2.3 Калибровка датчика с помощью анализа
В некоторых случаях можно откалибровать датчик поля, выполнив точный анализ электромагнитной связи. Как правило, такой анализ включает в себя решение интегрального уравнения для индуцированного заряда и тока на датчике, которые создаются электромагнитным полем [7]. Для этого анализа доступно несколько компьютерных программ.
Несмотря на недавние достижения в области численного моделирования за последние несколько лет, можно рассматривать только относительно простые формы датчиков. Более того, часто бывает трудно смоделировать детали структуры подачи для таких датчиков без избыточных усилий. Тем не менее такой подход к калибровке может быть эффективным в некоторых случаях.
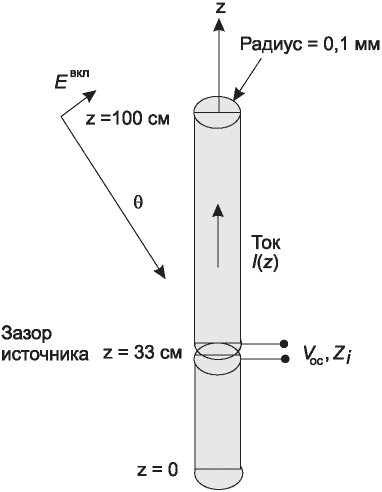
В качестве примера этой процедуры на рисунке 17 изображен очень простой датчик электрического поля: цилиндрический проводник длиной L = 1 м и радиусом a = 0,1 мм. Точка подачи расположена на расстоянии z = 33 см от одного конца (для улучшения наглядности результатов использовалась смещенная точка подачи), и предполагается, что электрическое поле излучается под углом  относительно оси цилиндра.
относительно оси цилиндра.
Как отмечено в 6.2.1, входной импеданс этого датчика на его зажимах является одним из необходимых параметров для описания устройства. Размещая источник единичного напряжения на входных зажимах, можно использовать код анализа антенны для вычисления индуцированного тока, протекающего по проводящей поверхности. Исходя из знания тока, протекающего непосредственно на зажимах датчика, обозначаемого  , входной импеданс получается как
, входной импеданс получается как  , а входное сопротивление является обратным:
, а входное сопротивление является обратным:  .
.
.
На рисунке 18 представлен график действительной и воображаемой частей входного импеданса Zi датчика в зависимости от частоты. Стоит обратить внимание, что для частот ниже примерно 100 МГц импеданс в основном емкостный, со значением емкости C ~= 1,7 пФ. Также стоит обратить внимание, что действительная часть импеданса всегда положительна - требование концепций энергосбережения.
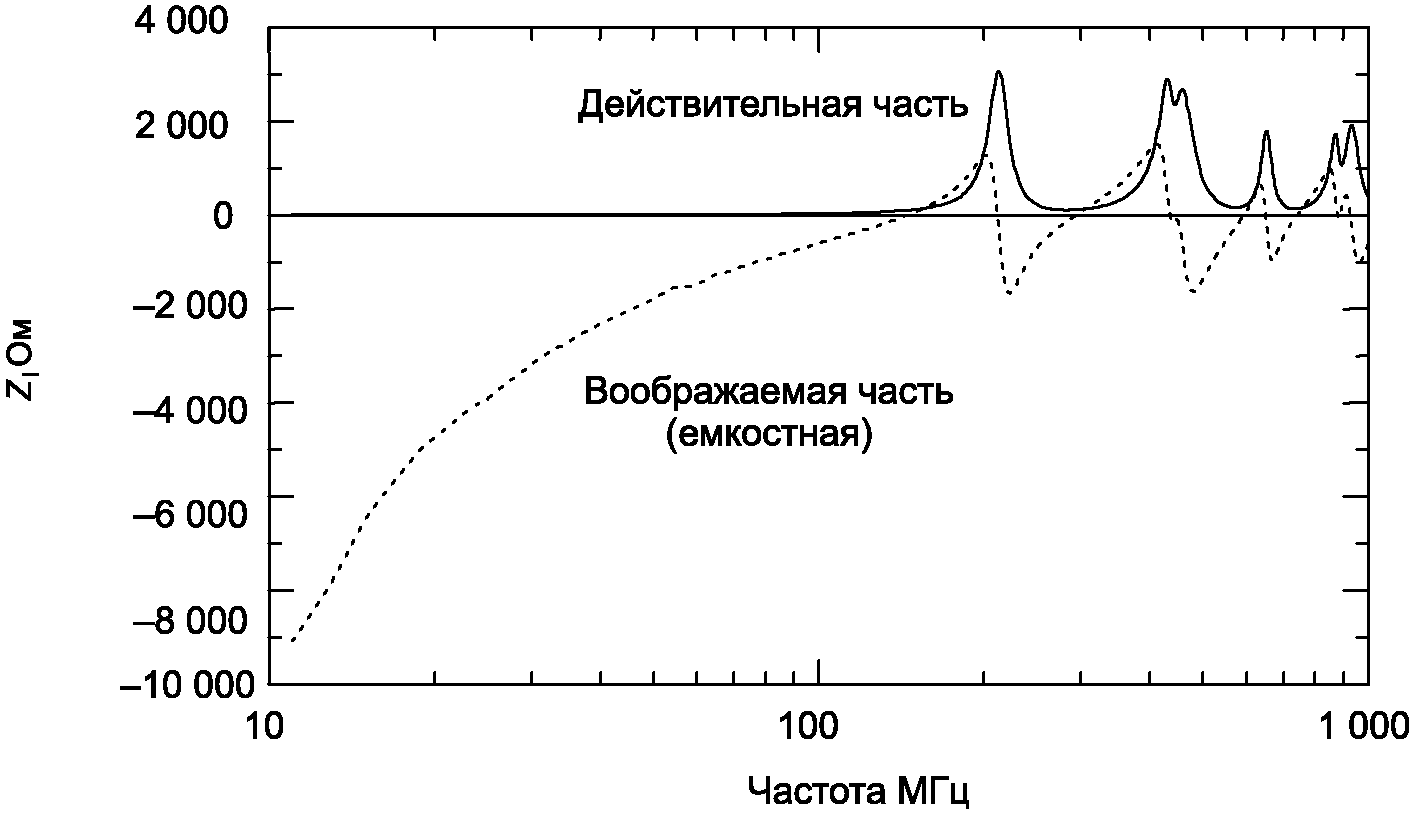
Рисунок 18 - График действительной и воображаемой частей
входного импеданса Zi для датчика электрического поля
на рисунке 17
Принцип анализа антенны также может быть использован для вычисления отклика датчика на наведенное поле. Для электрического поля, излучаемого под углом  , как изображено на рисунке 17, на рисунке 19 представлена величина индуцированного тока короткого замыкания, протекающего на зажимы датчика, в зависимости от частоты и для различных углов излучения. Стоит обратить внимание, что ниже 100 МГц отклик довольно линейный, при этом различные резонансы датчиков возникают сначала на частоте 150 МГц и на более высоких гармониках. Именно в линейном диапазоне частот датчик предназначен для эффективной работы.
, как изображено на рисунке 17, на рисунке 19 представлена величина индуцированного тока короткого замыкания, протекающего на зажимы датчика, в зависимости от частоты и для различных углов излучения. Стоит обратить внимание, что ниже 100 МГц отклик довольно линейный, при этом различные резонансы датчиков возникают сначала на частоте 150 МГц и на более высоких гармониках. Именно в линейном диапазоне частот датчик предназначен для эффективной работы.
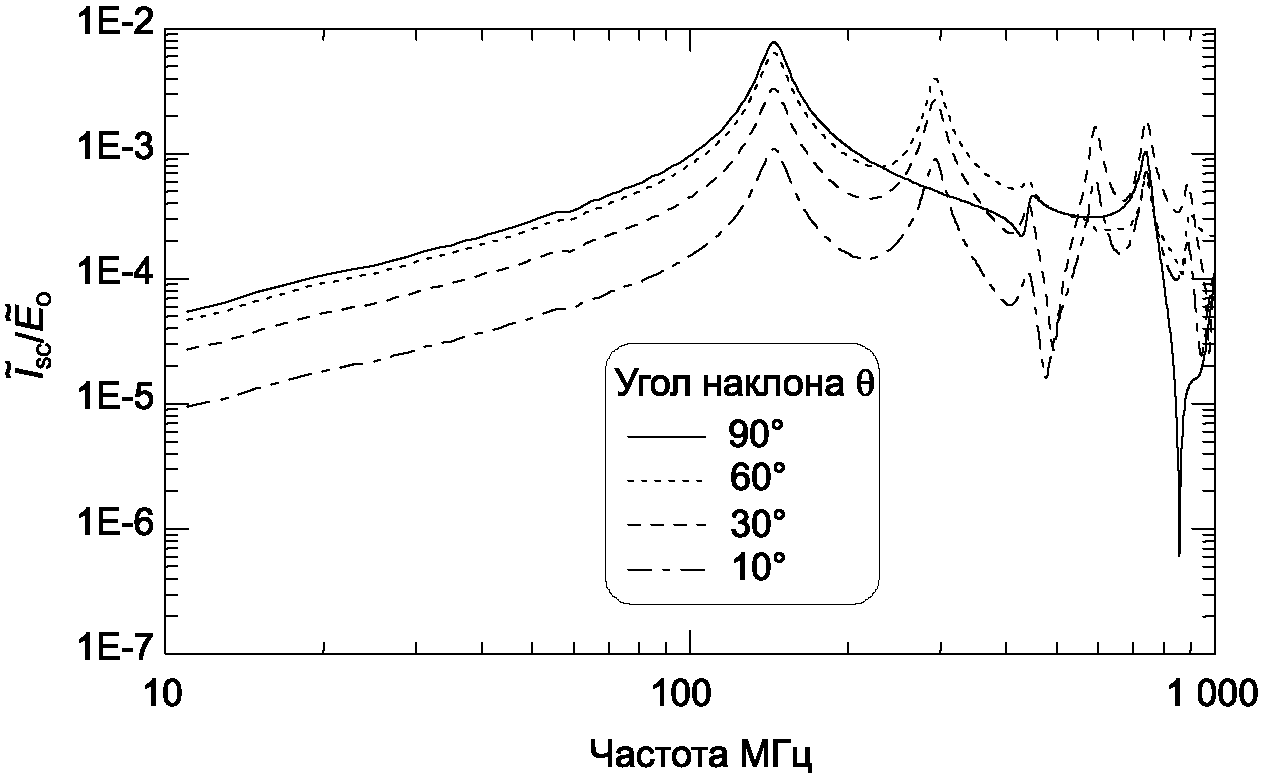
Рисунок 19 - График величины тока короткого замыкания,
протекающего на входе датчика для различных углов падения,
вычисленный с помощью принципа анализа антенны
Выполнив преобразование Нортона в Тевенина, можно определить напряжение разомкнутой цепи датчика. Датчик этого типа реагирует на электрическое поле, касательное к оси провода, которое задается  , и в этом случае желательно вычислить эффективную высоту, которая является функцией угла падения, как
, и в этом случае желательно вычислить эффективную высоту, которая является функцией угла падения, как
, и в этом случае желательно вычислить эффективную высоту, которая является функцией угла падения, как . (13b)
. (13b)На рисунке 20 изображены результирующие графики для этой эквивалентной высоты датчика. На низких частотах отмечается, что антенна реагирует пропорционально тангенциальному электрическому полю по длине цилиндра, при эквивалентной высоте оборудования  . На более высоких частотах отмечается, что различные резонансы датчиков нарушают этот калибровочный коэффициент и что необходимо использовать общую комплексную функцию. Более того, степень изменения калибровочного коэффициента зависит от угла падения, что подразумевает, что для разных углов падения требуются разные калибровочные коэффициенты. Тем не менее, если работа датчика ограничена низкочастотным режимом (в данном случае < 100 МГц), для описания датчика достаточно простой емкости и эквивалентной высоты.
. На более высоких частотах отмечается, что различные резонансы датчиков нарушают этот калибровочный коэффициент и что необходимо использовать общую комплексную функцию. Более того, степень изменения калибровочного коэффициента зависит от угла падения, что подразумевает, что для разных углов падения требуются разные калибровочные коэффициенты. Тем не менее, если работа датчика ограничена низкочастотным режимом (в данном случае < 100 МГц), для описания датчика достаточно простой емкости и эквивалентной высоты.
. На более высоких частотах отмечается, что различные резонансы датчиков нарушают этот калибровочный коэффициент и что необходимо использовать общую комплексную функцию. Более того, степень изменения калибровочного коэффициента зависит от угла падения, что подразумевает, что для разных углов падения требуются разные калибровочные коэффициенты. Тем не менее, если работа датчика ограничена низкочастотным режимом (в данном случае < 100 МГц), для описания датчика достаточно простой емкости и эквивалентной высоты.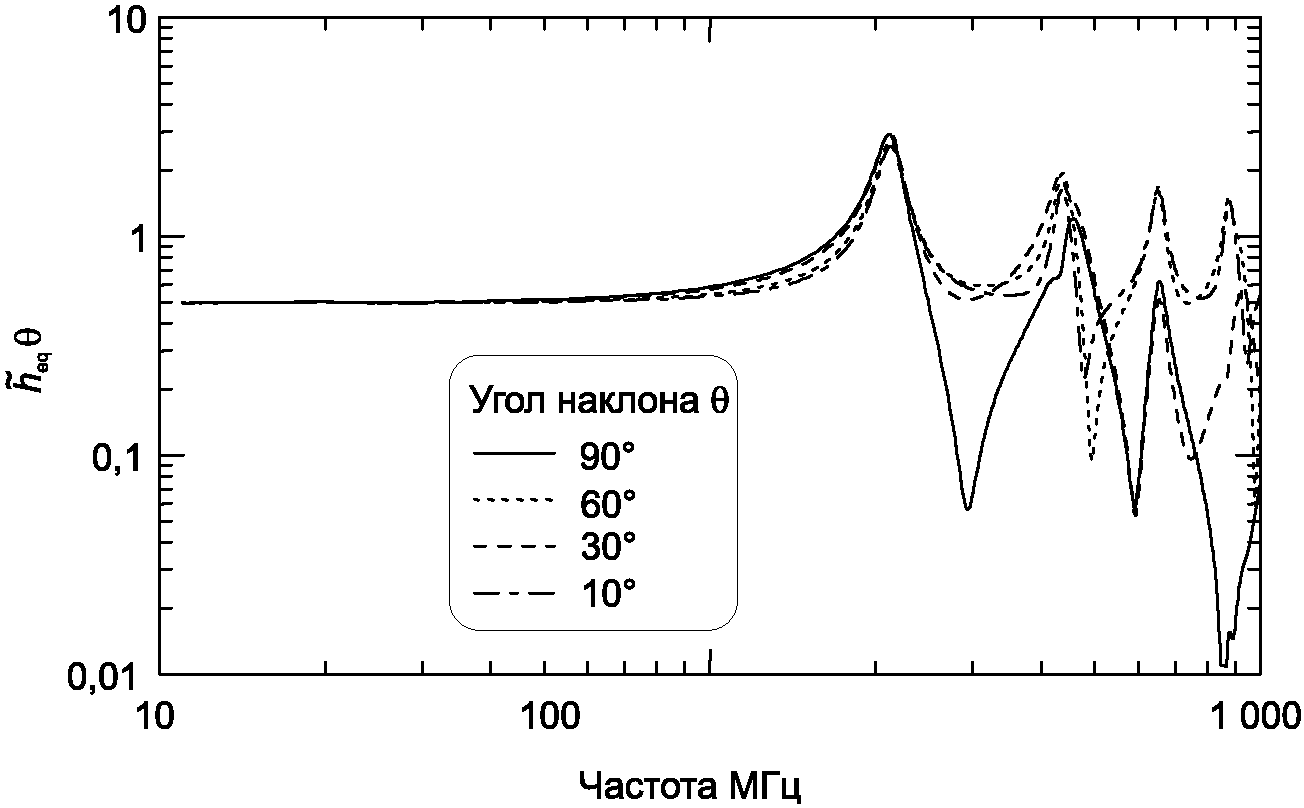
Рисунок 20 - График эффективной высоты датчика
для различных углов излучения
6.2.2.4 Калибровка датчика путем измерения в стандартной электромагнитной среде
Альтернатива процедуре аналитической калибровки, описанной в предыдущем пункте, включает прямое измерение выходного сигнала датчика в известной электромагнитной среде. Как обсуждалось в 6.1.1, основная трудность при таком подходе заключается в первую очередь в знании электромагнитной обстановки. Типичные процедуры испытания включают размещение датчика в испытательной камере или другой хорошо контролируемой обстановке, а затем измерение выходного сигнала датчика в зависимости от частоты. Этот отклик нормализуется напряженностью наведенного поля, чтобы обеспечить передаточную функцию датчика (как по величине, так и по фазе) в зависимости от частоты электромагнитного поля. Как обсуждалось выше, если датчик не нагружен, отклик будет достаточно постоянным (т.е. плоским) в рабочей полосе пропускания. Если датчик нагружен изнутри, то будет наблюдаться увеличение отклика пропорционально частоте  .
.
В дополнение к калибровке отклика датчика на напряжение необходимо определить входной импеданс. Для ненагруженного датчика электрического поля этот импеданс будет в первую очередь емкостью (или индуктивностью для датчика магнитного поля). На более высоких частотах паразитные элементы внутри датчика могут стать важными, и требуется измерение этих эффектов.
При измерении обоих этих параметров датчика важно учитывать ограничения динамического диапазона измерительного оборудования. Такие измерения всегда ограничены "минимальным уровнем шума" испытательного оборудования, и это ограничивает точность измерений. Более того, при измерении больших переходных сигналов наличие возможных нелинейных эффектов в датчиках может привести к аннулированию этих функций линейной калибровки.
6.2.3 Построение калиброванной измерительной цепочки из отдельных компонентов
Как только отдельные датчики представлены эквивалентной схемой и соответствующим образом откалиброваны с использованием одного из методов, описанных в предыдущем пункте, общая цепочка измерений может быть откалибрована путем представления различных элементов с точки зрения одной из двухпортовых моделей, описанных в приложении D, или, если система согласована, можно использовать уравнение (5).
Используя параметры рассеивания (S), которые наиболее легко измерить с помощью векторного анализатора цепей, калибровка измерительного канала должна проводиться следующим образом.
a) Отсоедините каждое из двухпортовых устройств (аттенюатор, кабель, устройство согласования и т.д.) от измерительной цепи.
b) Измерьте S-параметры двух портов в соответствии с процедурой, приведенной в руководстве к векторному анализатору цепей.
c) Преобразуйте S-параметры в параметры цепочки, используя уравнение (D.18).
d) Умножьте все матрицы параметров цепочки для компонентов измерительного канала вместе, как указано в уравнении (D.8), чтобы найти общее представление параметров цепочки для канала.
e) Учитывая спецификацию датчика как эквивалентной схемы Тевенина, используйте уравнение (D.10) для оценки напряжения отклика  .
.
f) Вычислите общую функцию калибровки для измерительной цепочки как  , где K(f) - переменная, описывающая функцию калибровки.
, где K(f) - переменная, описывающая функцию калибровки.
, где K(f) - переменная, описывающая функцию калибровки.При отсутствии точных калибровочных данных для измерительной цепочки существует несколько приблизительных способов получения необходимых данных для использования измерительной системы. Эти подходы либо могут быть разработаны для получения простых скалярных коэффициентов элементов измерительной цепочки, описанных в 4.3.1, либо могут предоставлять оценки комплексных частотно-зависимых откликов элементов. Эти приблизительные методы калибровки следует рассматривать как метод крайней необходимости, поскольку точная калибровка элементов всегда предпочтительнее.
В этом разделе описываются некоторые из методов получения приблизительных калибровочных функций.
6.3.1 Скалярная калибровка общей измерительной цепочки
Простейший способ получения приблизительного калибровочного коэффициента для всей измерительной цепочки состоит в том, чтобы принять частотно-независимую функцию ослабления для каждого из компонентов системы и применить ее для уменьшения отклика в месте измерения. Представление измерительной цепочки таким образом было описано в 4.3.1.
При таком подходе к калибровке целью является определение скалярного коэффициента K в уравнении (9), который позволяет определять поле возбуждения по измеренному отклику измерительной цепи. Это может быть достигнуто либо путем определения отдельных скалярных коэффициентов Ki, которые умножаются вместе для получения общего коэффициента K, либо путем прямой калибровки всей цепочки измерений. Эта последняя калибровка может быть выполнена с использованием метода замещения (см. 6.2.2.2) путем измерения поля возбуждения с помощью ранее откалиброванного датчика (и связанного с ним оборудования), а затем соотнесения этой известной напряженности поля с измерением, выполненным с помощью калибруемой системы.
6.3.2 Моделирование схемы
Более точный метод определения калибровки измерительной системы заключается в использовании решения параметра цепи для напряжения отклика нагрузки с точки зрения напряжения разомкнутой цепочки датчика, которое связано с падающим полем через коэффициент калибровки датчика. Это выражение приведено в уравнении (D.10). Для определения различных элементов в общей матрице параметров цепи можно разработать простую частотно-зависимую модель цепи для каждого компонента измерительной цепи, а результаты объединить с помощью уравнения (D.8).
6.3.2.1 Модель линии передачи
Например, представление параметров цепи для участка линии передачи приведено в уравнении (D.12) и включает характеристический импеданс и постоянную распространения линии. Как правило, эти параметры являются функциями частоты. Предполагая, что типичная линия передачи может быть описана индуктивностью L', емкостью C', сопротивлением R' и проводимостью G' на единицу длины, общие выражения для комплексной константы распространения  и характеристического импеданса следующие [7]:
и характеристического импеданса следующие [7]:
 . (14)
. (14)Обычно такие линии в практических измерительных системах имеют низкие потери, что подразумевает, что  и
и  . При этих допущениях постоянная распространения становится
. При этих допущениях постоянная распространения становится
и . При этих допущениях постоянная распространения становится (15)
(15)и характеристический импеданс Zc равен
 . (16)
. (16)Использование этих параметров в уравнении (D.12) обеспечит частотно-зависимую модель участка линии передачи.
6.3.2.2 Модель аттенюатора
Аналогичное моделирование может быть разработано для других двухпортовых элементов измерительной цепочки. Одним из распространенных элементов является простой аттенюатор, который должен быть помещен в линию передачи с характеристическим сопротивлением Zc и обеспечивать коэффициент ослабления  .
.
Простая модель аттенюатора на постоянном токе представлена Т-образной схемой, изображенной на рисунке 4. Если предполагается, что аттенюатор работает в системе передачи на 50 Ом, можно показать, что значения резистивных элементов R1 и R2 имеют следующие значения для заданного коэффициента ослабления  :
:
 . (17)
. (17)Объединение трех элементов аттенюатора вместе способом, аналогичным для уравнения (D.11), позволяет разработать общую матрицу параметров цепи для двухпортового аттенюатора. Это выражается как
 , (18)
, (18)которое является выражением для параметров цепочки с точки зрения коэффициента ослабления  цепочки.
цепочки.
Эта модель может быть расширена до более высоких частот, включая эффекты паразитных емкостей на входных и выходных зажимах схемы, как изображено на рисунке 21. Эту схему можно проанализировать, как и прежде, путем добавления влияния емкостей в параметры цепочки. Кроме того, таким же образом могут быть включены эффекты индуктивности выводов.
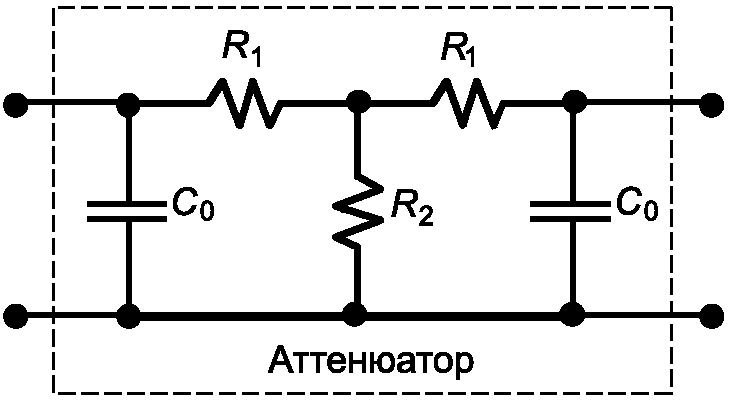
Рисунок 21 - Высокочастотная эквивалентная схема
элемента аттенюатора
6.3.3 Подходящая аппроксимация калибровочных функций
Иногда вместо точной модели схемы или оцифрованных данных могут предоставляться калибровочные кривые отклика схемы или сетевого компонента. Часто такие данные представлены в виде откликов только по величине. Используя графический подход, известный как диаграмма Боде, можно изучить отклики на логарифмическом графике и вывести рациональную полиномиальную аппроксимацию для функции. Это делается путем определения асимптот спектральной кривой, нахождения их наклонов на логарифмическом графике (которые должны быть целочисленными значениями) и определения частот пересечения асимптот. Детали этого подхода более подробно описаны в [8].
(обязательное)
A.1 Параметры формы сигнала
Для обстановки ЭМСВМ IEC 61000-2-9 и IEC 61000-2-10 описывают важные особенности падающих E- и H-полей, которые могут возбуждать систему, или проводимые переходные процессы, которые могут протекать по кабелям, подключенным к оборудованию. Аналогично для условий ЭМСВМ необходимо определить как поле падающего излучения, так и проводимые переходные процессы.
Из множества различных форм сигналов, встречающихся при электромагнитном испытании, есть несколько, которые регулярно появляются при таких измерениях. Первый общий класс формы сигнала выглядит как функция с одним импульсом, как изображено на рисунке A.1. Эта основная часть формы сигнала состоит из быстро нарастающего и спадающего однополярного импульса, который может описываться временем нарастания, шириной импульса, максимальной скоростью нарастания и пиковым значением. На этом рисунке не изображены низкоуровневые предымпульсные и поздние компоненты формы сигнала, которые могут присутствовать в некоторых формах сигнала. Если этот тип формы сигнала используется для описания излучаемого переходного электромагнитного поля в дальней зоне, то существует требование, чтобы интегральная площадь под кривой формы сигнала на рисунке A.1 была равна нулю. Таким образом, для этого случая важны компоненты формы сигнала до импульса и в конце времени, поскольку они должны компенсировать область под первичным импульсом, изображенную на этом рисунке.
Параметры формы сигнала, используемые для описания основного пика формы сигнала на рисунке A.1, включают следующие параметры для переходного отклика R(t):
- пиковое значение Rмакс;
- время до пикового значения tпик;
- время нарастания от 10% до 90%  ;
;
- ширину импульса, определяемую как "полная ширина при половинном максимуме" (ПШПМ), которая представляет собой разницу во времени между начальной точкой 50%-ного пикового значения в форме сигнала и поздней точкой в форме сигнала, имеющей то же значение,  ;
;
- максимальную скорость нарастания = (dR/dt)макс для t < tпик.
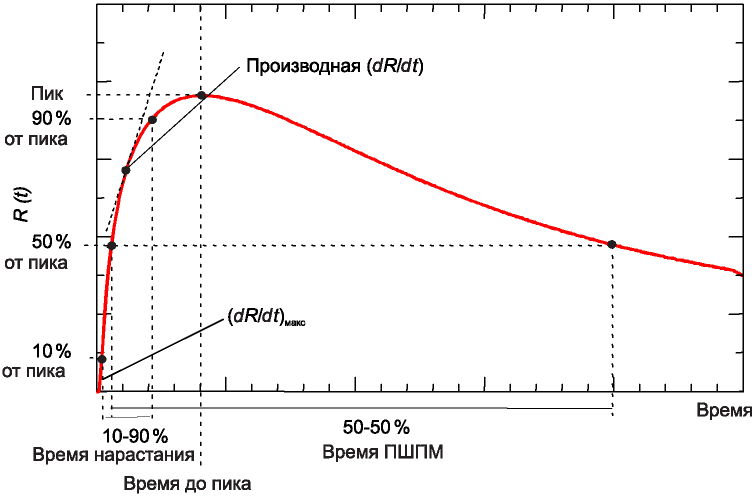
используемых для описания импульсной составляющей
переходного отклика формы сигнала R(t)
В дополнение к одноимпульсному отклику, изображенному на рисунке A.1, измерения переходных процессов высокой мощности часто приводят к колебательным формам сигнала, подобным изображенным на рисунке A.2. Параметры формы сигнала, изображенные на рисунке A.1, также могут быть использованы в этом случае для описания первичного пика отклика. Однако есть два дополнительных параметра, которые необходимы для описания этой формы сигнала. Они представляют собой 1/e времени падения tf огибающей колебаний (которое может быть связано с коэффициентом качества формы волны), а T - средний период колебаний. Эти параметры вместе с предымпульсным и шумовым вкладами изображены на рисунке A.2.
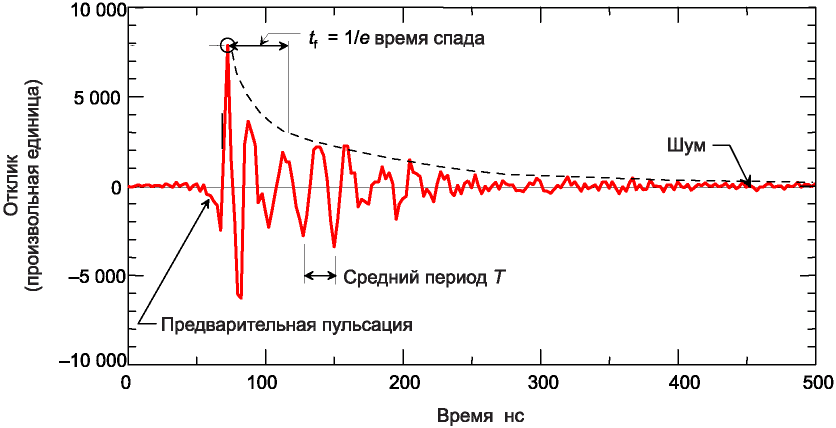
часто встречающейся при измерениях мощных
переходных электромагнитных полей
A.2 Нормы формы сигнала
Другим типом параметра формы сигнала является временная форма сигнала p-норм  , определенная в [A.1] как
, определенная в [A.1] как
 , (A.1)
, (A.1)где p - целое число: 1, 2 и т.д. Стоит обратить внимание, что эти нормированные величины обычно включают математическую операцию со всей формой сигнала в процессе интегрирования, в отличие от простых параметров формы сигнала, указанных в [A.1].
Примечание - Норма бесконечности  является исключением, поскольку, хотя она и включает процесс интегрирования, ее результат может быть получен путем простого изучения формы сигнала.
является исключением, поскольку, хотя она и включает процесс интегрирования, ее результат может быть получен путем простого изучения формы сигнала.
является исключением, поскольку, хотя она и включает процесс интегрирования, ее результат может быть получен путем простого изучения формы сигнала.В таблице A.1 приведены три обычно используемых стандарта формы сигнала для описания отклика высокой мощности.
Таблица A.1
Значение p | Атрибут нормы сигнала | Физическая величина |
1 |  | Выпрямленное импульсное значение отклика |
2 |  | Квадратный корень интегрального отклика действия |
|R(t)|макс | Пиковое значение отклика |
Нормы, приведенные в таблице A.1, обычно используются при описании электромагнитных откликов высокой мощности. В таблице A.2 представлена таблица норм N1 - N5, которые обычно используются для определения характеристик формы сигнала, вместе с указанием того, почему норма представляет особый интерес.
Таблица A.2
Временные нормы формы сигнала,
используемые для мощных переходных сигналов
p-норм | Нормальное количество | Название | Пример использования |
N1 = |R(t)|макс | Пиковое (абсолютное) значение | Расстройство схемы | |
n/a |  | Пиковое (абсолютное) значение скорости нарастания | Искривление компонентов; расстройство схемы |
n/a |  | Пиковый (абсолютный) импульс | Прокол диэлектрика (если R обозначает электрическое поле) |
 | Выпрямленный суммарный импульс | Повреждение оборудования | |
 | Квадратный корень из интеграла действия | Выгорание компонентов |
A.3 Спектр формы сигнала
Другим полезным атрибутом формы сигнала является его частотный спектр  . Это комплексная функция частоты f, и для бесконечно длинного непрерывного переходного отклика R(t) она определяется интегралом преобразования Фурье, как определено в (A.2):
. Это комплексная функция частоты f, и для бесконечно длинного непрерывного переходного отклика R(t) она определяется интегралом преобразования Фурье, как определено в (A.2):
Примечание - Стоит обратить внимание, что в [A.2] используется обозначение  для сигналов временной гармоники, тогда как в этом документе мы используем обычное инженерное обозначение
для сигналов временной гармоники, тогда как в этом документе мы используем обычное инженерное обозначение  .
.
для сигналов временной гармоники, тогда как в этом документе мы используем обычное инженерное обозначение .Обычно для измеренного переходного отклика функция R(t) известна не для всех времен, она скорее представляет собой выборочную функцию из N значений в дискретные моменты времени ti, которые равномерно распределены между t = 0 и t = Tмакс. Это приводит к разнице во времени между выборками  и следствием этого является то, что частотный спектр является периодическим по частоте, причем основной спектр определяется в пределах частот Найквиста
и следствием этого является то, что частотный спектр является периодическим по частоте, причем основной спектр определяется в пределах частот Найквиста  . За пределами этого частотного диапазона спектр повторяется сам по себе. Таким образом, если форма сигнала отклика ограничена полосой пропускания (например, если она не имеет существенных частотных составляющих выше максимальной частоты Fмакс), она может быть адекватно представлена дискретными временными выборками. Это известно как теорема о выборке.
. За пределами этого частотного диапазона спектр повторяется сам по себе. Таким образом, если форма сигнала отклика ограничена полосой пропускания (например, если она не имеет существенных частотных составляющих выше максимальной частоты Fмакс), она может быть адекватно представлена дискретными временными выборками. Это известно как теорема о выборке.
и следствием этого является то, что частотный спектр является периодическим по частоте, причем основной спектр определяется в пределах частот Найквиста . За пределами этого частотного диапазона спектр повторяется сам по себе. Таким образом, если форма сигнала отклика ограничена полосой пропускания (например, если она не имеет существенных частотных составляющих выше максимальной частоты Fмакс), она может быть адекватно представлена дискретными временными выборками. Это известно как теорема о выборке.Более того, при численной оценке уравнения (A.2) отклики также будут оцениваться в дискретных частотных точках fk, и простое приближение к интегралу выражается
Обычно при оценке дискретного преобразования Фурье в уравнении (A.3) частотные точки выбираются равными  для k = -N/2, ..., N/2. Стоит обратить внимание, что интервал выборки в частотном спектре
для k = -N/2, ..., N/2. Стоит обратить внимание, что интервал выборки в частотном спектре  . Таким образом, длина записи переходных откликов оказывает прямое влияние на низкочастотное разрешение спектра.
. Таким образом, длина записи переходных откликов оказывает прямое влияние на низкочастотное разрешение спектра.
для k = -N/2, ..., N/2. Стоит обратить внимание, что интервал выборки в частотном спектре . Таким образом, длина записи переходных откликов оказывает прямое влияние на низкочастотное разрешение спектра.Этот дискретный характер частотного спектра подразумевает, что переходной отклик также является периодической функцией времени. Дискретный спектр  может быть вычислен либо путем прямого вычисления суммы, либо с помощью быстрого преобразования Фурье, которое является гораздо более быстрым способом вычисления спектра. Подробности приведены в [A.2].
может быть вычислен либо путем прямого вычисления суммы, либо с помощью быстрого преобразования Фурье, которое является гораздо более быстрым способом вычисления спектра. Подробности приведены в [A.2].
Тот факт, что и переходной отклик, и ее спектр в частотной области являются периодическими функциями с периодом Tмакс и Fмакс соответственно, означает, что необходимо соблюдать осторожность, чтобы избежать возникновения сглаживания, как во временной, так и в частотной области. Сглаживание происходит, когда происходит "сквозная передача" отклика или спектра от одного периода к другому, тем самым искажая результаты. Таким образом, все рассчитанные переходные и спектральные характеристики должны быть тщательно проверены, чтобы убедиться, что наложение не является проблемой.
В качестве примера частотного спектра переходной характеристики на рисунке A.3 изображена величина спектра колебательной формы волны, приведенной на рисунке A.2. Соответствующая фаза на этом графике не изображена.
Фактическая форма сигнала во временной области на рисунке A.2 состоит из N = 1024 точек и длится до общего времени Tмакс = 2,555 мкс (хотя на графике изображены только первые 500 нс формы сигнала). Это означает, что время выборки составляет  . Следовательно, для формы сигнала на рисунке A.2 частота Найквиста равна
. Следовательно, для формы сигнала на рисунке A.2 частота Найквиста равна  , а интервал выборки спектра равен
, а интервал выборки спектра равен  .
.
. Следовательно, для формы сигнала на рисунке A.2 частота Найквиста равна , а интервал выборки спектра равен .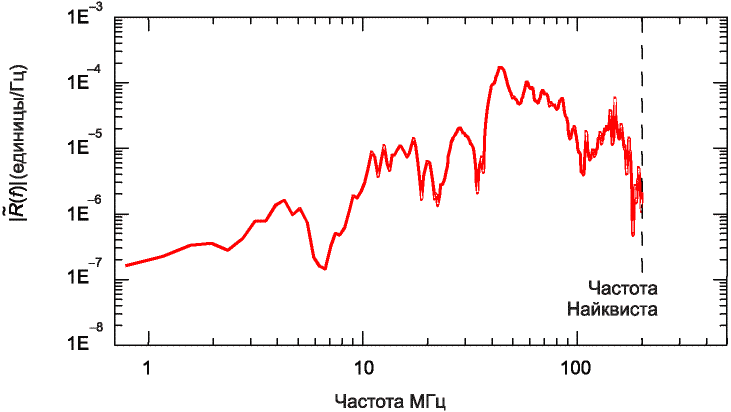
формы волны на рисунке A.2
A.4 Ссылки
[A.1] BAUM C.E. Norms and Eigenvector Norms. Mathematics Notes, Note 63, Kirtland AFB, New Mexico, November 1979
(справочное)
B.1 Датчики свободного поля
Датчики, предназначенные для измерения электрического поля, в основном представляют собой антенны, работающие значительно ниже своей первой резонансной частоты. На низких частотах отклик антенны приблизительно пропорционален частоте, и, следовательно, поведение антенны можно описать довольно просто.
На рисунке B.1 изображен универсальный датчик электрического поля, который подключен к элементу нагрузки, представляющему оборудование измерительной цепи. Этот датчик часто называют датчиком "свободного поля", поскольку он предназначен для работы вдали от любых объектов, которые могут нарушать локальное электрическое поле. Датчик представлен эквивалентной схемой Нортона, изображенной в правой части рисунка B.1.
Примечание - Конечно, эквивалентная схема Тевенина также может быть использована для представления этого датчика электрического поля. Это приводит к тому, что датчик описывается с точки зрения напряжения его разомкнутой цепи, которое связано с электрическим полем возбуждения антенны эквивалентной высоты. Однако большинство производителей датчиков, как правило, описывают свои датчики с точки зрения эквивалентной площади, и, следовательно, предпочтителен эквивалент Нортона. Для получения более подробной информации обратитесь к Baum, C.E. "Электромагнитная топология для анализа и проектирования сложных электромагнитных систем", с. 467 - 547 в "Быстрых электрических и оптических измерениях", Том I, ред. И.Э. Томпсон и Л.Х. Люссен, Мартинус Найхофф, Дордрехт, 1986, с. 77.
Источник тока короткого замыкания для этого датчика можно рассматривать как возникающий в результате изменения во времени заряда, индуцируемого на металлических элементах датчика локальным полем возбуждения. Это удобно выразить во временной области, используя эквивалентную площадь датчика Aeq, как
 , (B.1)
, (B.1)где  - электрическое поле смещения, а
- электрическое поле смещения, а  - диэлектрическая проницаемость свободного пространства.
- диэлектрическая проницаемость свободного пространства.
- электрическое поле смещения, а - диэлектрическая проницаемость свободного пространства.В частотной области, где f обозначает частоту, а  - угловую частоту, это выражение для термина источника тока Нортона имеет вид
- угловую частоту, это выражение для термина источника тока Нортона имеет вид
- угловую частоту, это выражение для термина источника тока Нортона имеет вид . (B.2)
. (B.2)На низких частотах, когда антенна электрически мала, импеданс датчика может быть аппроксимирован емкостью, поскольку реальная часть импеданса датчика (сопротивление излучению) незначительна. По мере приближения частоты к резонансной частоте датчика одиночная емкость больше не является подходящим приближением, и требуется более сложное представление импеданса датчика.
Сопротивление нагрузки R представляет собой нагрузку, приложенную к датчику измерительной цепочкой. Обычно измерительная цепочка использует коаксиальный кабель на 50 Ом для соединения компонентов. Поскольку датчик электрического поля имеет балансный выход, необходимо иметь устройство согласования для преобразования этого балансного выхода в небалансную коаксиальную линию на 50 Ом. Такое устройство согласования изменяет уровень импеданса линий, и, как следствие, эффективное сопротивление, которое нагружает датчик, обычно составляет 100 Ом. Дополнительная информация об элементе устройства согласования приведена в 4.3.3.
В дополнение к сопротивлению измерительного оборудования R другое сопротивление Ro может быть расположено последовательно с оборудованием. Это сопротивление присутствует не во всех датчиках электрического поля, и, как вскоре будет рассмотрено, это сопротивление можно использовать для настройки работы датчика.
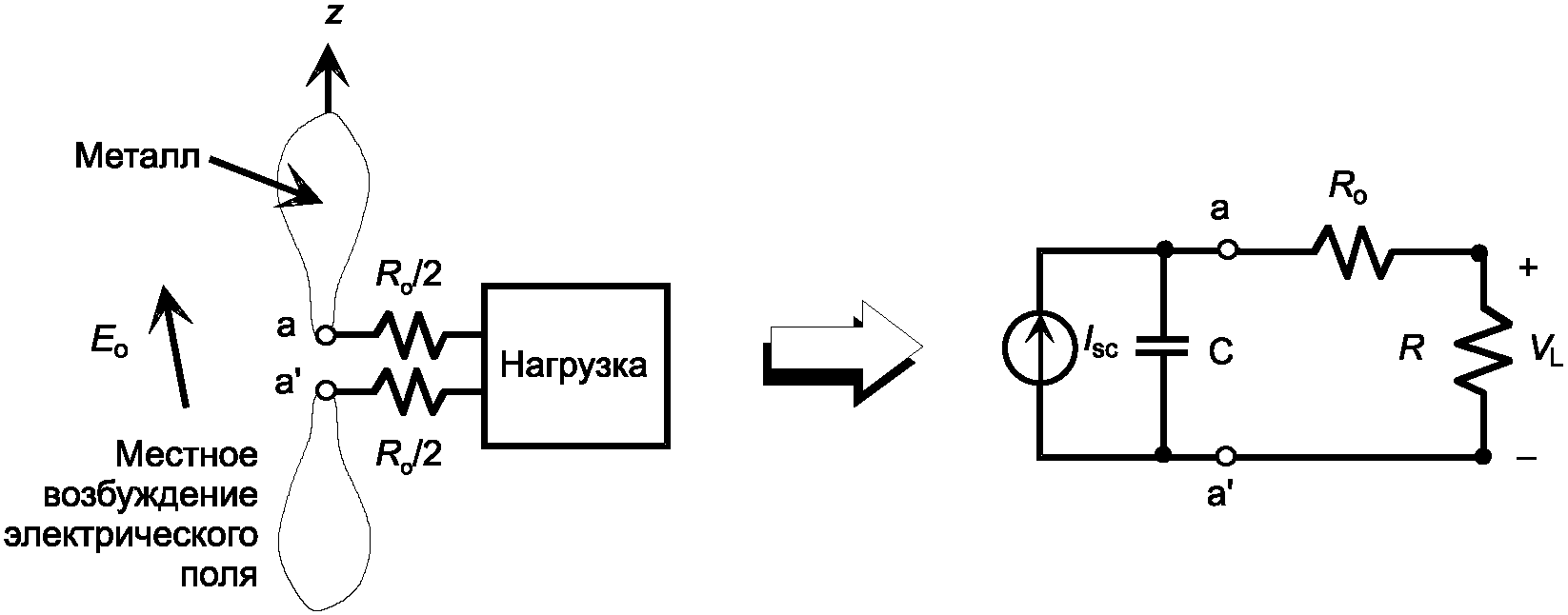
поля вместе с эквивалентной схемой Нортона
Простой анализ схемы Нортона в частотной области обеспечивает следующий отклик напряжения на нагрузке
где  обозначает z-компоненту внешнего электрического поля в частотной области. Путем определения нормализованной частотной функции
обозначает z-компоненту внешнего электрического поля в частотной области. Путем определения нормализованной частотной функции  как
как
общее выражение для напряжения нагрузки датчика электрического поля в уравнении (B.3) становится

или эквивалентно
 . (B.6)
. (B.6)Это последнее уравнение определяет передаточную функцию в частотной области  , используемую для представления датчика электрического поля в общей цепочке измерений. Часто величина
, используемую для представления датчика электрического поля в общей цепочке измерений. Часто величина  относится к эквивалентной высоте датчика и обозначается как he(f).
относится к эквивалентной высоте датчика и обозначается как he(f).
, используемую для представления датчика электрического поля в общей цепочке измерений. Часто величина Функция F уравнения (B.4) обеспечивает частотную зависимость работы датчика, и она представлена на рисунке B.2. Изображены как величина, так и фаза этой функции. На достаточно низких частотах, где  , частотная функция приблизительно равна
, частотная функция приблизительно равна  , что указывает на то, что отклик датчика пропорционален скорости нарастания электрического поля. Для высоких частот, где
, что указывает на то, что отклик датчика пропорционален скорости нарастания электрического поля. Для высоких частот, где  , частотная функция является постоянной, указывая на то, что отклик датчика пропорционален электрическому полю. Между этими двумя областями находится переходная область, где реакция плавно переходит от одного поведения к другому. Эти регионы указаны на рисунке B.2.
, частотная функция является постоянной, указывая на то, что отклик датчика пропорционален электрическому полю. Между этими двумя областями находится переходная область, где реакция плавно переходит от одного поведения к другому. Эти регионы указаны на рисунке B.2.
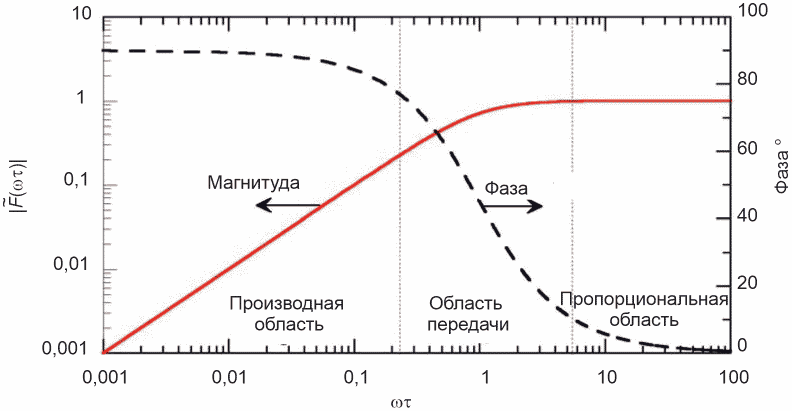
Рисунок B.2 - Магнитуда и фаза функции
нормированной частоты для датчика поля
B.1.1 Производные (D-точечные) датчики
Выбрав правильную конструкцию параметров датчика, можно сконструировать датчик, который реагирует на скорость нарастания электрического поля возбуждения. Например, если постоянная времени RC  в уравнении (B.5) выбрана очень малой, отклик будет пропорционален
в уравнении (B.5) выбрана очень малой, отклик будет пропорционален  , и, следовательно, датчик будет работать как дифференцирующее устройство. Это можно сделать, пренебрегая сопротивлением Ro и требуя, чтобы
, и, следовательно, датчик будет работать как дифференцирующее устройство. Это можно сделать, пренебрегая сопротивлением Ro и требуя, чтобы  , где fмакс - максимальная частота в спектре, для которой должен использоваться датчик.
, где fмакс - максимальная частота в спектре, для которой должен использоваться датчик.
в уравнении (B.5) выбрана очень малой, отклик будет пропорционален , где fмакс - максимальная частота в спектре, для которой должен использоваться датчик.При этих допущениях напряжение нагрузки уравнения (B.5) равно

Во временной области это выражение для напряжения нагрузки равно
которое действительно до тех пор, пока время нарастания tr измеренного электрического поля равно tr << RC.
Такие датчики называются D-точечными датчиками, поскольку их отклик пропорционален скорости нарастания (например, производной) вектора электрического смещения D (или электрическому полю E). Производители датчиков обычно определяют такие датчики по эквивалентной площади Aeq и по верхней частоте среза  , а не по собственной емкости и сопротивлению датчика. Таким образом, производитель предполагает, что такие датчики всегда будут работать с эффективным сопротивлением нагрузки 100 Ом. Если такие датчики используются с другими нагрузками или в частотных режимах, где простой отклик невозможен, необходимо использовать более общую калибровочную функцию уравнения (B.5) для получения электрического поля по измеренному напряжению датчика.
, а не по собственной емкости и сопротивлению датчика. Таким образом, производитель предполагает, что такие датчики всегда будут работать с эффективным сопротивлением нагрузки 100 Ом. Если такие датчики используются с другими нагрузками или в частотных режимах, где простой отклик невозможен, необходимо использовать более общую калибровочную функцию уравнения (B.5) для получения электрического поля по измеренному напряжению датчика.
, а не по собственной емкости и сопротивлению датчика. Таким образом, производитель предполагает, что такие датчики всегда будут работать с эффективным сопротивлением нагрузки 100 Ом. Если такие датчики используются с другими нагрузками или в частотных режимах, где простой отклик невозможен, необходимо использовать более общую калибровочную функцию уравнения (B.5) для получения электрического поля по измеренному напряжению датчика.Когда датчик электрического поля используется в производном режиме (например, когда он измеряет скорость нарастания электрического поля), необходимо интегрировать его отклик для определения фактического значения электрического поля. Как отмечено на рисунке 1, это может быть сделано путем включения интегрирующего устройства в цепочку измерений или может быть сделано численно при последующей обработке данных.
B.1.2 Датчики прямого электрического поля
Изменяя параметры датчика электрического поля, можно разработать датчик, который реагирует непосредственно на поле возбуждения, а не на скорость его нарастания (временная производная). Выбирая постоянную времени RC в уравнении (B.5) таким образом, что  , где fмин - минимальная частота измеряемого спектра, напряжение нагрузки становится
, где fмин - минимальная частота измеряемого спектра, напряжение нагрузки становится
, где fмин - минимальная частота измеряемого спектра, напряжение нагрузки становится . (B.9)
. (B.9)Стоит обратить внимание, что, поскольку R зафиксировано на номинальном значении 100 Ом, чтобы удовлетворить требованию  , мы можем либо увеличить последовательное сопротивление Ro, либо увеличить емкость C. Выполнение любого из этих действий приведет к снижению чувствительности датчика, как указано в уравнении (B.5).
, мы можем либо увеличить последовательное сопротивление Ro, либо увеличить емкость C. Выполнение любого из этих действий приведет к снижению чувствительности датчика, как указано в уравнении (B.5).
, мы можем либо увеличить последовательное сопротивление Ro, либо увеличить емкость C. Выполнение любого из этих действий приведет к снижению чувствительности датчика, как указано в уравнении (B.5).В конструкции таких датчиков прямого отклика часто заменяется элемент сопротивления. При фиксированном размере сенсорных элементов могут быть предусмотрены различные значения сопротивления для Ro для настройки полосы пропускания датчика.
B.2 Датчики магнитного поля в свободном поле
Датчик магнитного поля в свободном поле, изображенный на рисунке B.3, является электрическим двойником датчика электрического поля. Изменяющийся во времени магнитный поток  , проходящий через контур, вызовет напряжение в сопротивлении нагрузки, которое будет измерено. Для достаточно медленных переходных полей возбуждения (таких, что время их нарастания намного больше, чем время прохождения через контур) разомкнутая цепочка источника постоянного напряжения контура задается как
, проходящий через контур, вызовет напряжение в сопротивлении нагрузки, которое будет измерено. Для достаточно медленных переходных полей возбуждения (таких, что время их нарастания намного больше, чем время прохождения через контур) разомкнутая цепочка источника постоянного напряжения контура задается как
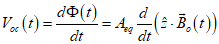 , (B.10)
, (B.10)где  - плотность магнитного потока, связывающего контур, а Aeq - эквивалентная площадь датчика. В частотной области это выражение задается как
- плотность магнитного потока, связывающего контур, а Aeq - эквивалентная площадь датчика. В частотной области это выражение задается как
 (B.11)
(B.11)Как видно из данного выражения, магнитное поле H и плотность магнитного потока B связаны через  , где
, где  - проницаемость свободного пространства.
- проницаемость свободного пространства.
, где - проницаемость свободного пространства.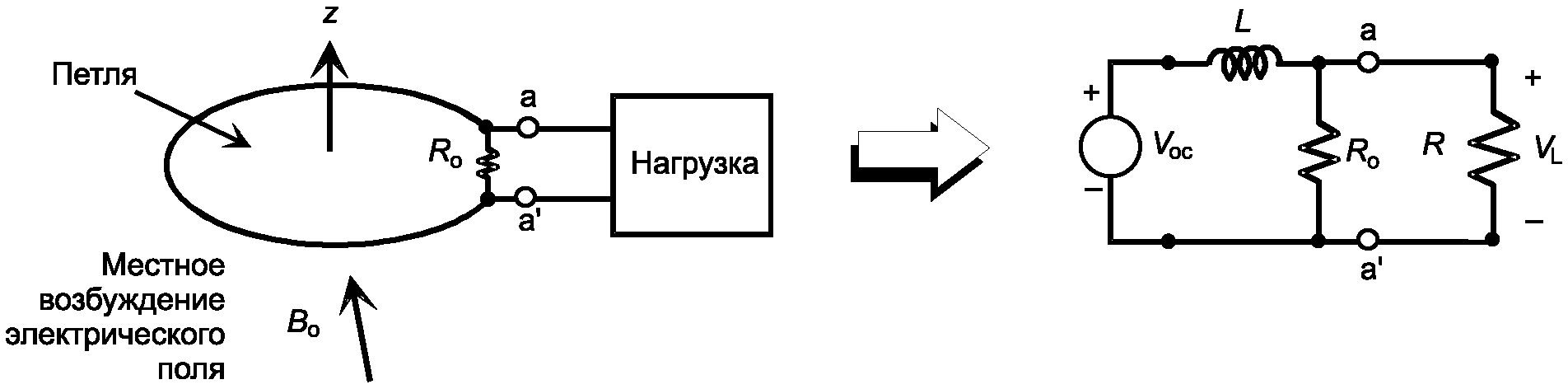
вместе с эквивалентной схемой Тевенина
Допуская возможность шунтирующего сопротивления Ro через измерительный контур, как изображено на рисунке B.3, общее сопротивление нагрузки, приложенное к контуру, представляет собой параллельную комбинацию этого шунта и сопротивления R, представляющего измерительную цепочку. Это полное сопротивление имеет вид

и измеренное напряжение этого датчика затем задается как

В уравнении (B.13) функция  снова задается уравнением (B.4), но теперь с постоянной времени, заданной как
снова задается уравнением (B.4), но теперь с постоянной времени, заданной как  .
.
снова задается уравнением (B.4), но теперь с постоянной времени, заданной как .B.2.1 Производные (B-точечные) датчики
Для определенных параметров датчика отклик датчика может быть выполнен для измерения скорости нарастания возбуждения магнитного поля. Например, если  , то отклик датчика в частотной области приблизительно равен
, то отклик датчика в частотной области приблизительно равен
, то отклик датчика в частотной области приблизительно равен
а во временной области это выражение
Требование, чтобы  , может быть выполнено путем устранения сопротивления шунтирования
, может быть выполнено путем устранения сопротивления шунтирования  .
.
, может быть выполнено путем устранения сопротивления шунтирования .Как и в случае с датчиком электрического поля, производители обычно описывают эти датчики магнитного поля эквивалентной площадью Aeq и максимальной полосой пропускания  , предполагая, что сопротивление нагрузки составляет номинальные 100 Ом.
, предполагая, что сопротивление нагрузки составляет номинальные 100 Ом.
, предполагая, что сопротивление нагрузки составляет номинальные 100 Ом.B.2.2 Датчики прямого магнитного поля
Как и в случае с датчиками электрического поля, при соответствующей загрузке чувствительного контура их можно заставить реагировать непосредственно на магнитное поле. В частности, если  , где fмин - минимальная частота измеряемого спектра, напряжение нагрузки становится
, где fмин - минимальная частота измеряемого спектра, напряжение нагрузки становится
, где fмин - минимальная частота измеряемого спектра, напряжение нагрузки становится . (B.16)
. (B.16)Стоит обратить внимание, что требование о том, чтобы  было малым, может быть достигнуто путем создания сопротивления нагрузки контура Ro, близкого к короткому замыканию. Однако при этом измеряемое напряжение уменьшается. Таким образом, существует компромисс между минимальной частотой отключения этого датчика и уровнем напряжения, подаваемого на измерительную схему.
было малым, может быть достигнуто путем создания сопротивления нагрузки контура Ro, близкого к короткому замыканию. Однако при этом измеряемое напряжение уменьшается. Таким образом, существует компромисс между минимальной частотой отключения этого датчика и уровнем напряжения, подаваемого на измерительную схему.
было малым, может быть достигнуто путем создания сопротивления нагрузки контура Ro, близкого к короткому замыканию. Однако при этом измеряемое напряжение уменьшается. Таким образом, существует компромисс между минимальной частотой отключения этого датчика и уровнем напряжения, подаваемого на измерительную схему.B.3 Датчики электрического поля (или поверхностного заряда) плоскости заземления
Также возможно разработать датчики электромагнитного поля, которые функционируют должным образом при расположении вблизи проводников. Предполагая, что датчик будет расположен на бесконечно большой плоскости заземления, теория изображений может быть использована для разработки таких датчиков. Для случая измерений электрического поля на рисунке B.4 изображена общая конфигурация датчика электрического поля, расположенного над проводящим заземлением. Этот датчик, по существу, представляет собой половину датчика свободного поля на рисунке B.1, а другая половина представляет собой изображение в плоскости заземления.
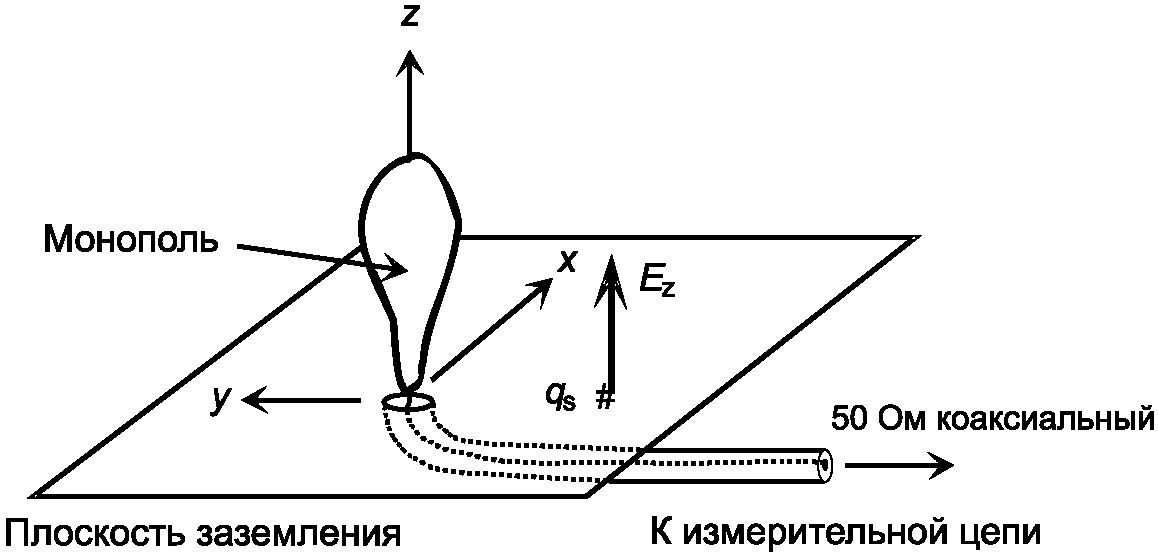
над плоскостью заземления, используемого для измерения
вертикального электрического поля или, что эквивалентно,
плотности поверхностного заряда
Для датчика на рисунке B.4 действительна та же эквивалентная схема для датчика свободного поля, что и приведенная на рисунке B.1, за исключением того, что эквивалентная площадь Aeq составляет половину площади датчика свободного поля, а емкость C удвоена. Кроме того, выходной сигнал датчика этого типа является небалансным (коаксиальным) и рассчитан на работу с импедансом 50 Ом, что соответствует уровню импеданса измерительной цепи. Следовательно, для этих типов датчиков устройство согласования не требуется.
На плоскости заземления тангенциальное электрическое поле равно нулю (при условии что плоскость заземления идеально проводящая), и единственной составляющей электрического поля является вертикальная (z) составляющая. Это компонент электрического поля, который возбуждает датчик.
Примечание - Стоит обратить внимание, что в этом и всех других датчиках электромагнитного поля, обсуждаемых здесь, датчик измеряет общее электромагнитное поле, которое состоит из наведенного поля плюс любые отраженные поля от близлежащих рассеивающих тел. В случае датчиков, установленных на плоскости заземления, рассеянное поле имеет тот же порядок величины, что и наведенное поле, и таково, что выполняются граничные условия тангенциального E = 0 и нормального H = 0 на плоскости заземления.
Как правило, этот датчик работает как D-точечный датчик, при этом его напряжение (на нагрузке 50 Ом) определяется уравнениями (B.7) и (B.8). В этом случае внутреннее сопротивление нагрузки датчика Ro равно нулю, и это позволяет датчику измерять скорость нарастания электрического поля.
На плоском проводнике электрический поток D должен заканчиваться на плотности электрического заряда qs. Это выражается как граничное условие
 . (B.17)
. (B.17)Это уравнение подразумевает, что датчик на рисунке B.4 фактически измеряет отклик на локальную поверхностную плотности заряда. Таким образом, в частотной области уравнение (B.7) может быть записано с точки зрения qs как
 . (B.18)
. (B.18)Во временной области это выражение для напряжения нагрузки равно
 . (B.19)
. (B.19)B.4 Датчики магнитного поля (или поверхностного заряда) плоскости заземления
По аналогии с изображенным датчиком для измерения электрических полей на плоскости заземления, возможно иметь структуру с половинным контуром для измерения магнитного поля на земле. Это показано на рисунке B.5.
Электрическое поведение этого датчика моделируется эквивалентной схемой Тевенина, приведенной на рисунке B.3, кроме того, используя метод изображений, мы отмечаем, что эквивалентная площадь Aeq равна половине площади полного контура того же размера, индуктивность L равна половине площади полного контура и на выходе получается небалансный коаксиальный кабель, подключенный на нагрузку 50 Ом.
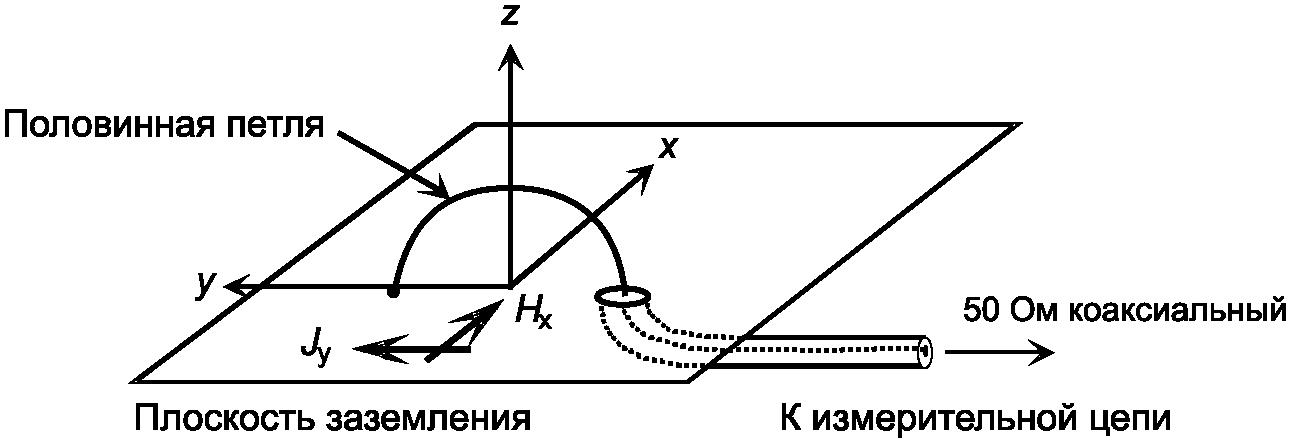
используемого для измерения тангенциального магнитного поля
или, что эквивалентно, поверхностной плотности тока
Этот датчик сконструирован без внутреннего сопротивления нагрузке  , так что его отклик пропорционален скорости нарастания поля. Измеренное напряжение при сопротивлении нагрузки 50 Ом определяется уравнениями (B.14) и (B.15), при этом датчик реагирует на составляющую поля Bx (или Hx).
, так что его отклик пропорционален скорости нарастания поля. Измеренное напряжение при сопротивлении нагрузки 50 Ом определяется уравнениями (B.14) и (B.15), при этом датчик реагирует на составляющую поля Bx (или Hx).
, так что его отклик пропорционален скорости нарастания поля. Измеренное напряжение при сопротивлении нагрузки 50 Ом определяется уравнениями (B.14) и (B.15), при этом датчик реагирует на составляющую поля Bx (или Hx).На поверхности проводящей плоскости заземления тангенциальное магнитное поле и поверхностный ток Js связаны граничным условием
 . (B.20)
. (B.20)Следовательно, для датчика, ориентированного на реагирование на компонент поля Hx, как изображено на рисунке B.5, его можно рассматривать как измерение компонента Jy поверхностного тока в частотной области:
 , (B.21)
, (B.21)и во временной области это выражение равно
 . (B.22)
. (B.22)B.5 Активные датчики
Активный датчик - это датчик, содержащий внутреннюю электронику, которая может выполнять определенную обработку измеренного сигнала. Например, такой датчик может содержать активную интегральную схему, которая устранит необходимость в использовании интегратора в измерительной цепочке. Кроме того, такие датчики могут быть сконструированы таким образом, чтобы обеспечивать лучшие характеристики шума, тем самым повышая чувствительность измерительной цепочки.
Конечно, как и оптоволоконный элемент в измерительной цепочке, активному датчику потребуется внешний источник питания, который потребует периодического обслуживания в полевых условиях, и в некоторых случаях это может быть неудобно.
Активные датчики обычно доступны у специализированных поставщиков оборудования для измерения электромагнитных полей, и из-за их относительно сложной конструкции они стоят дороже, чем обычные пассивные датчики. Однако для специальных применений они могут быть полезны.
B.6 Датчики обнаружения огибающей
При измерении сигнала ЭМСВМ с амплитудной модуляцией часто единственной необходимой информацией является форма и амплитуда импульса. В таких случаях можно использовать более медленный цифровой преобразователь и любую связанную с ним оптоволоконную линию связи, если принятый сигнал демодулируется на датчике высокоскоростным диодом. Этот процесс оставляет для записи только модулирующий сигнал. Выбор и калибровка детекторного диода с использованием концепций раздела 6 имеют решающее значение и должны быть тщательно продуманы. Диод устанавливается после устройства согласования. Для таких измерений интегратор не требуется.
B.7 Датчики тока провода
Датчики также могут быть использованы для измерения тока, протекающего по проводам. Это делается путем измерения локального магнитного поля, окружающего провод, а затем соотнесения его с током в проводе. Основная концепция датчика этого типа изображена на рисунке B.6, и при правильном выборе параметров его можно заставить реагировать непосредственно на ток, а не на скорость нарастания тока.
В частотной области напряжение разомкнутой цепи, индуцируемое в чувствительном контуре, задается

где  - ток линии, а M - взаимный импеданс между линией и чувствительным контуром. Для этого контура измерения для определения наведенного напряжения на сопротивлении нагрузки можно использовать эквивалентную схему Тевенина, приведенную на рисунке B.3. Для датчиков этого типа выход обычно представляет собой небалансную нагрузку 50 Ом, так что устройство согласования не требуется.
- ток линии, а M - взаимный импеданс между линией и чувствительным контуром. Для этого контура измерения для определения наведенного напряжения на сопротивлении нагрузки можно использовать эквивалентную схему Тевенина, приведенную на рисунке B.3. Для датчиков этого типа выход обычно представляет собой небалансную нагрузку 50 Ом, так что устройство согласования не требуется.

измерения токов в проводах
Термин "самоинтегрирующийся" используется для обозначения того, что измеренная форма сигнала не нуждается в дальнейшем интегрировании для воспроизведения фактической формы сигнала стимула. Фактическая конструкция этого датчика тока более сложна, чем изображено на рисунке B.6. На рисунке B.7 показаны важные аспекты конструкции датчика. Во-первых, для повышения чувствительности датчика в чувствительной петле может быть несколько витков N, и эти витки расположены вокруг магнитного материала с высокой относительной проницаемостью  , имеющего внутренний радиус r1, внешний радиус r2 и толщину w. Этот магнитный сердечник служит для усиления магнитного потока, проходящего через катушки. Кроме того, на выходе датчика установлено регулирующее сопротивление Ro для регулировки более низкой частоты полосы пропускания датчика.
, имеющего внутренний радиус r1, внешний радиус r2 и толщину w. Этот магнитный сердечник служит для усиления магнитного потока, проходящего через катушки. Кроме того, на выходе датчика установлено регулирующее сопротивление Ro для регулировки более низкой частоты полосы пропускания датчика.
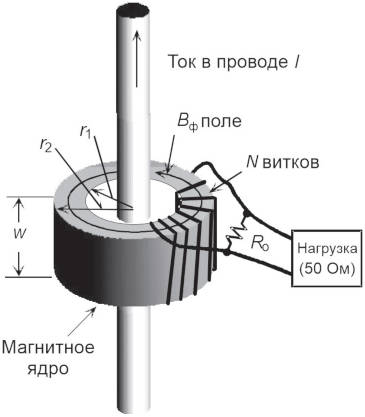
Для этого датчика взаимная индуктивность N-виткового контура задается как
 . (B.24)
. (B.24)Работа этого типа датчиков является самоинтегрирующейся. Используя эквивалентную схему для датчика, приведенную на рисунке B.3, с напряжением разомкнутой цепи, заданным уравнением (B.23), и предполагая низкое значение сопротивления настройки Ro, выражение для индуцированного напряжения при нагрузке 50 Ом составляет
где  - постоянная времени измерительного контура, L - собственная индуктивность виткового контура, а Rt - общая параллельная комбинация Ro и сопротивления 50 Ом R, заданная уравнением (B.12). Уравнение (B.25) справедливо для частот, превышающих fмин, где должно соблюдаться проектное требование, согласно которому
- постоянная времени измерительного контура, L - собственная индуктивность виткового контура, а Rt - общая параллельная комбинация Ro и сопротивления 50 Ом R, заданная уравнением (B.12). Уравнение (B.25) справедливо для частот, превышающих fмин, где должно соблюдаться проектное требование, согласно которому  . Это последнее требование выполняется за счет уменьшения сопротивления шунта Ro.
. Это последнее требование выполняется за счет уменьшения сопротивления шунта Ro.
- постоянная времени измерительного контура, L - собственная индуктивность виткового контура, а Rt - общая параллельная комбинация Ro и сопротивления 50 Ом R, заданная уравнением (B.12). Уравнение (B.25) справедливо для частот, превышающих fмин, где должно соблюдаться проектное требование, согласно которому . Это последнее требование выполняется за счет уменьшения сопротивления шунта Ro.Принимая во внимание, что параметр  в уравнении (B.25) измеряется в Ом, такие датчики обычно описываются этим вещественным параметром, который упоминается как "сопротивление датчика" Zp. Таким образом, напряжение, индуцируемое при сопротивлении 50 Ом, нагружающем датчик, задается как
в уравнении (B.25) измеряется в Ом, такие датчики обычно описываются этим вещественным параметром, который упоминается как "сопротивление датчика" Zp. Таким образом, напряжение, индуцируемое при сопротивлении 50 Ом, нагружающем датчик, задается как
в уравнении (B.25) измеряется в Ом, такие датчики обычно описываются этим вещественным параметром, который упоминается как "сопротивление датчика" Zp. Таким образом, напряжение, индуцируемое при сопротивлении 50 Ом, нагружающем датчик, задается как
Это выражение справедливо до тех пор, пока рабочая частота больше fмин.
В качестве примера измеренного импеданса датчика тока в зависимости от частоты на рисунке B.8 представлена величина импеданса датчика тока с номинальным сопротивлением 1 Ом в диапазоне частот от 1000 Гц до 200 МГц. На этом графике дифференцирующий характер датчика очевиден для частот ниже примерно fмин ~= 0,2 МГц. Выше этой частоты отклик достаточно ровный при импедансе датчика около 0,95 Ом - немного ниже указанного значения для датчика в 1 Ом.
Следует иметь в виду, что этот импеданс датчика, как правило, является функцией со сложным значением, и, если датчик должен использоваться на частотах, отличных от тех, на которых выполняется уравнение (B.26), отклик должен быть оценен с использованием более общего комплексного уравнения в первой строке уравнения (B.25).
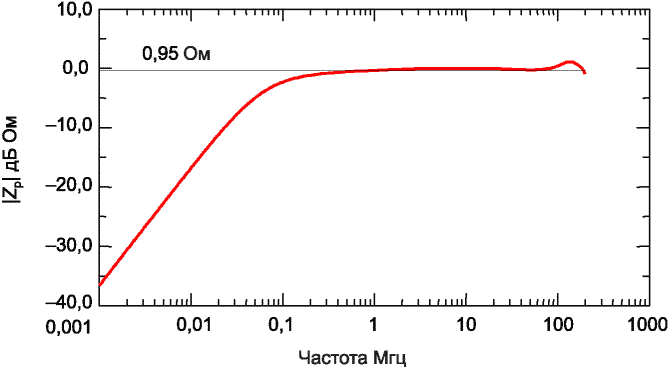
датчика тока с номинальным сопротивлением 1 Ом
Встроенный датчик тока - это тот, который может быть вставлен в трубчатый проводник для измерения внешнего тока. В этом датчике выходные провода расположены внутри трубчатого проводника и проходят до конца, не влияя на поведение внешнего тока.
Этот датчик реагирует на скорость нарастания тока в линии и имеет геометрию, изображенную на рисунке B.9. На внешней окружности проводника выполнен кольцевой разрез, который ведет к внутренней камере датчика. Вся геометрия является осесимметричной. Эта камера служит "чувствительной петлей" для магнитного поля, создаваемого током, текущим по проводнику.
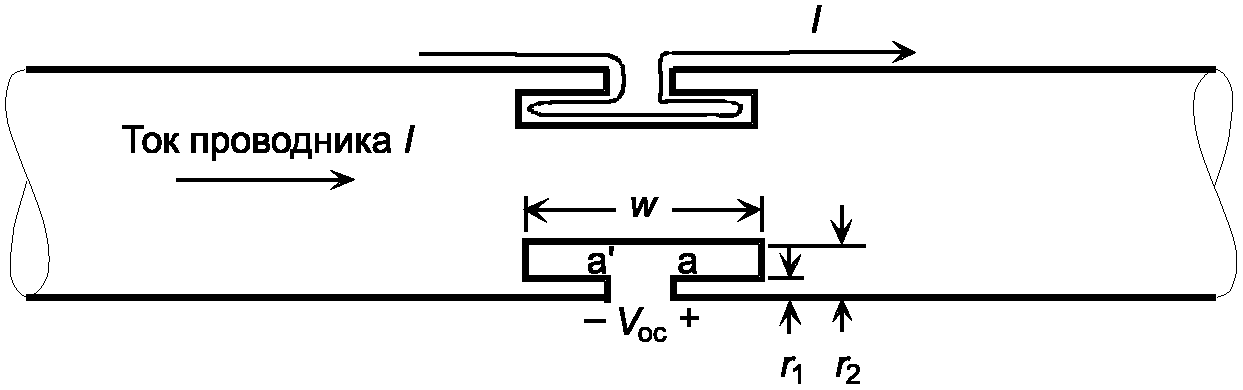
Рисунок B.9 - Геометрия встроенного I-точечного датчика тока
Наличие магнитного потока внутри измерительной камеры создает напряжение на зажимах a-a'. Это напряжение разомкнутой цепи измерительного зазора подается по коаксиальному кабелю (не изображен на рисунке) на измерительное оборудование. Для этого датчика тока подходит эквивалентная схема, изображенная на рисунке B.3, при этом напряжение разомкнутой цепи зазора указано в уравнении (B.23). В этом случае взаимная индуктивность камеры задается уравнением (B.23) с N и  , равными единице:
, равными единице:
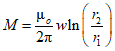
Предполагая, что у этого датчика нет подстроечного резистора  , отклик напряжения в частотной области при нагрузке 50 Ом составляет
, отклик напряжения в частотной области при нагрузке 50 Ом составляет
, отклик напряжения в частотной области при нагрузке 50 Ом составляет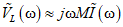
и во временной области это
 . (B.29)
. (B.29)Этот датчик можно сконструировать с несколькими чувствительными зазорами, и это изменит величину взаимной индуктивности. Однако производитель такого датчика укажет общий коэффициент взаимной индуктивности M датчика вместе с полосой пропускания датчика в качестве параметров производительности.
B.8 Датчики тока коаксиального кабеля
Также представляют интерес датчики для измерения токов, протекающих в коаксиальном кабеле. Они описаны в следующем пункте.
B.8.1 Самоинтегрирующийся коаксиальный датчик тока
Для коаксиальных кабелей существует несколько различных типов датчиков, которые можно использовать для измерения тока. Возможно, самым простым является использование ящика прерывания, который вставляется в коаксиальный кабель и имеет внутренний проводник коаксиального кабеля, соединяющий самоинтегрирующийся датчик тока типа, описанного в B.7.1. Концепция конструкции этого датчика изображена на рисунке B.10. Анализ и поведение этого датчика тока точно такие же, как описано в предыдущем пункте.
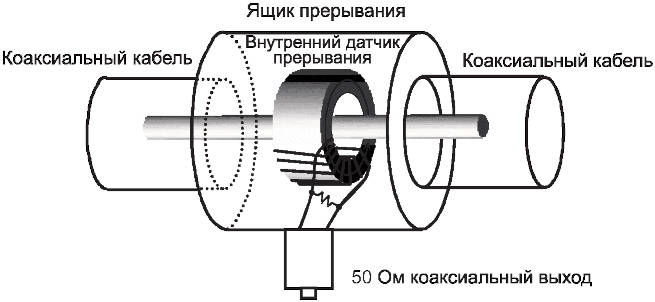
Рисунок B.10 - Концепция проектирования
датчика тока в коаксиальном кабеле
Существует несколько различных версий этого типа коаксиального датчика тока. Размер и форма одного общедоступного устройства изображены на рисунке B.11. Это датчик типа CIP-10, который имеет импеданс датчика 1 Ом, полосу пропускания от 20 кГц до 400 МГц и может пропускать максимальный ток 1 А в секунду. Для подключения к коаксиальному кабелю предусмотрены два разъема типа GR, а для выходного сигнала датчика предусмотрен коаксиальный выход N-типа.
Рисунок B.11 - Форма и размеры датчика тока
в коаксиальном кабеле CIP-10
B.8.2 I-точечный датчик тока коаксиального кабеля
Другой тип датчика тока может быть использован для контроля токов в коаксиальной геометрии. Этот датчик аналогичен встроенному I-точечному датчику из B.7.2. Он реагирует на скорость нарастания тока в коаксиальной линии и имеет геометрию, изображенную на рисунке B.12.
В этом датчике во внешнем цилиндре коаксиального кабеля выполнен разрез по окружности, и в этом месте над линией размещена камера датчика. Эта камера служит чувствительным контуром для B-поля, создаваемого током, протекающим по внутреннему проводнику коаксиальной линии. (Обратный ток на внешнем коаксиальном цилиндре протекает по внешней поверхности камеры датчика и, следовательно, не создает никакого B-поля внутри камеры.)
датчика тока коаксиального кабеля
Напряжение нагрузки (при нагрузке 50 Ом на чувствительном зазоре) может быть рассчитано с помощью эквивалентной схемы, приведенной на рисунке B.3. Это напряжение задается уравнением (B.28), а взаимная индуктивность M задается уравнением (B.27).
Хотя большинство датчиков, описанных в предыдущем приложении, предназначены для измерения высокочастотных (или быстрых переходных) сигналов, имеющих полосу пропускания примерно от 100 кГц до 1 ГГц, существуют случаи, когда необходимо измерять сигналы гораздо более низкой частоты. Примером может служить сигнал запаздывания ЭМП (известный как магнитогидродинамический ЭМП, или МГДЭМП), который в соответствии с IEC 61000-2-9 может иметь частотный спектр от нескольких Герц и ниже.
Поскольку частота этих сигналов настолько мала, можно использовать обычные методы измерения квазипостоянных сигналов. К ним относятся следующие:
- измерение тока с использованием измерительного резистора с низким сопротивлением, расположенного последовательно с проводником, по которому проходит ток. Напряжение на этом резисторе измеряется с помощью стандартного оборудования для измерения напряжения, которое может быть подключено к регистратору данных или компьютеру для записи откликов в зависимости от времени. Максимальная частота дискретизации должна быть в два раза выше самой высокой частоты значимого спектра тока;
- измерение напряжения на проводнике с использованием схемы делителя напряжения вместе со стандартным оборудованием для измерения низкочастотного напряжения, используемым для измерения тока;
- низкочастотные магнитные поля могут быть измерены с помощью полупроводниковых датчиков, основанных на эффекте Холла. В этом устройстве печатная маска или пластина расположена на подходящем полупроводниковом кристалле. Эта пластина имеет зажимы для пропускания известного тока через полупроводник, а также зажимы для измерения напряжения Холла, которое создается магнитным потоком, приложенным к кристаллу. Этот сенсорный элемент обнаруживает компоненты магнитного потока, перпендикулярные поверхности чипа, и излучает электрический сигнал, пропорциональный потоку. Такие датчики часто продаются как магнитометры.
(обязательное)
C.1 План испытания
Учитывая конкретные требования к проведению испытания реакции системы или компонента, вызванной ЭМСВМ, должен быть разработан подробный план испытаний. Этот план должен быть написан достаточно подробно, чтобы знающий специалист мог воспользоваться планом и успешно провести испытание, не имея предварительных знаний о системе или местоположении.
Такой план испытаний должен включать следующие пункты:
- краткое изложение общих целей и задач испытания;
- определение угрозы ЭМСВМ (т.е. электрического напряжения, действующего на испытываемое оборудование или систему);
- изложение концепций обработки данных вместе с примером того, как данные должны обрабатываться;
- перечень первоочередных контрольных точек и определение измеренных величин отклика;
- следует разработать список других контрольных точек или измерений на случай непредвиденных обстоятельств, поскольку некоторые из первоочередных контрольных точек могут быть не поддающимися измерению;
- список всего необходимого испытательного оборудования и материалов;
- список всего необходимого персонала и их функций во время испытания;
- результаты физического обследования объекта (чертежи и т.д.);
- обсуждение других вопросов, имеющих отношение к испытанию: безопасность, личная безопасность, требования к транспортировке и другая логистика;
- расписание мероприятий;
- требования к отчетности по испытанию и документации.
Испытание - это, по сути, учебный опыт. Редко бывает так, что то, что было задумано при планировании перед испытанием, получается именно так, как ожидалось, в ходе испытания. По мере продолжения измерений могут стать очевидными новые открытия о системе и различных измерениях. В результате могут потребоваться дополнительные измерения для дальнейшего изучения поведения системы.
Чтобы учесть эту возможность, важно иметь возможность изменять план испытания в ходе испытания. План испытания - это лишь начальное руководство по испытанию. Его не следует рассматривать как неизменный план. Однако его не следует изменять без должного рассмотрения и консультаций со всеми осведомленными участниками испытания.
C.1.1 Проведение испытания
Руководитель испытаний
Подробные требования плана испытаний содержат указания относительно направления проведения испытания. Руководитель испытания несет ответственность за соблюдение этого руководства. Ни у одного успешного испытания не может быть более одного руководителя. Руководитель испытаний должен обладать окончательными полномочиями для принятия решений об испытании, об отклонениях от плана испытаний и для любых других административных действий. В отсутствие руководителя испытаний должен быть назначен заместитель руководителя по испытаниям.
Ежедневная встреча для анализа данных
В ходе расширенного испытания (более 3 дн) должно проводиться ежедневное совещание со всем присутствующим персоналом, проводящим испытания, с целью обзора прошлых измерений и подведения итогов измерений, запланированных на следующий день. Это важно, поскольку позволяет всем, кто связан с испытанием, понять текущий статус испытания, любые трудности с испытанием и любые необходимые изменения в плане испытания.
Измерение данных
Измерения должны проводиться в соответствии с планом испытаний, при этом изменения в плане испытаний утверждаются только руководителем испытаний. Как только измерение произведено, необходимо составить график исходных данных и занести его в журнал испытаний. Это позволяет немедленно оценить качество данных.
Должны проводиться частые измерения уровня шума для проверки того, что измерения проводятся надлежащим образом и что для испытания имеется хорошее отношение "сигнал - шум". Конечно, такие измерения должны быть запланированы заранее в документе плана испытаний.
Одновременное измерение и анализ
Во время испытания должен быть проведен анализ данных испытания. Это важно, поскольку обработка данных может служить проверкой качества данных по мере их измерения. Гораздо лучше знать о наличии трудностей с данными через час или два после проведения измерения, чем в конце испытания, когда невозможно предпринять какие-либо действия по исправлению положения.
Более того, анализ в режиме реального времени может дать руководителю испытания рекомендации относительно возможных изменений в плане испытания на основе результатов анализа.
Архивирование данных
Данные испытания обычно поступают с регистратора формы сигнала (оцифровщика) на измерительный компьютер, а затем передаются на рабочую станцию анализа для обработки. Это подразумевает, что на этих компьютерах должно быть две копии данных. Резервное копирование и избыточность данных имеют решающее значение.
Во время обработки данных аналитики могут обнаружить проблемы в данных, требующие либо ручной коррекции данных (неверная точка данных или, возможно, неправильная информация заголовка), либо повторного измерения. В любом случае такие события должны быть тщательно задокументированы в журнале испытаний, а измеренные данные соответствующим образом аннотированы. После внесения таких исправлений в исходные данные они должны быть загружены на диск или магнитную ленту для архивирования.
Изменение плана испытания
Как упоминалось выше, важно, чтобы испытание было достаточно гибким, чтобы исследовать неожиданные события во время испытания. Если руководитель испытаний решает изменить план после консультаций с другими участниками испытания, должна быть представлена письменная документация об изменении, обсуждение обоснования изменения и описание новых измерений, которые необходимо произвести. В некотором смысле это похоже на "приложение" к плану испытания, и это важно, поскольку после завершения испытания персонал, проводивший испытание, скорее всего, забудет, почему были внесены определенные изменения.
C.1.2 Обеспечение качества измерений
Чтобы гарантировать, что измерения являются точными и репрезентативными для фактического отклика испытываемой системы, следует рассмотреть несколько вопросов. Они заключаются в следующем.
a) Перед любыми измерениями испытываемой системы измерьте реакцию окружающей среды внутри системы, отключив внешнее возбуждение ЭМСВМ и приведя измерительное оборудование в нормальную конфигурацию
b) Выполните проверку минимального уровня шума измерительной системы, выполнив измерение со снятым датчиком и заменив его согласованием импеданса на кабеле (или датчиком, соответствующим образом экранированным от измеряемого возбуждения). Как и в шаге N 1, внешняя среда ЭМСВМ должна быть отключена.
c) Откалибруйте датчики электромагнитного поля или тока и измерительные цепи, используя процедуры, описанные в разделе 6.
d) Попробуйте выполнить выборку любого переходного сигнала с одинаково разнесенными точками выборки с общим количеством 2n точек (512, 1 024 и т.д.), чтобы избежать интерполяции измеренных данных.
e) Проверьте повторяемость всех измерений, выполнив несколько измерений в каждой контрольной точке.
f) Измените полярность датчика (когда это возможно), чтобы убедиться, что расположение датчика не является определяющим фактором при измерениях.
g) Документируйте все наблюдения и результаты по мере их появления в журнале испытаний.
(справочное)
Измерительная цепочка, изображенная на рисунке 1, состоит из нескольких каскадных двухпортовых цепей, которые могут описываться линейной зависимостью между входными и выходными зажимами. Таким образом, представление каждого из электрических элементов в измерительной цепочке (например, устройство согласования, аттенюатор, интегратор и т.д.) может быть выполнено способом, который не зависит от характеристик других элементов и от цепей источника или нагрузки. Различные распространенные способы представления таких двухпортовых схем кратко изложены в настоящем приложении.
На рисунке D.1 изображена общая двухпортовая сеть с двумя напряжениями и токами, определенными на каждом порту. Обычно в сеть поступает положительный ток, как изображено на рисунке. Поведение этой схемы на ее зажимах полностью представлено соотношениями между напряжениями и токами, исходя из предположения, что схема линейна.

Рисунок D.1 - Соотношения напряжения
и тока для общей двухпортовой сети
D.2 Параметры импеданса разомкнутой цепи
Как описывалось в D.1, одним из способов описания этой сети является использование матричного уравнения
в котором элементы zij называются параметрами импеданса разомкнутой цепи. Матрица называется Z-матрицей двух портов. Значения отдельных элементов импеданса в этом уравнении могут быть определены путем вычисления (или измерения) напряжений и токов выбранного порта при разомкнутом другом порту как
 (D.2)
(D.2)Как и в случае эквивалентов однопортовой схемы Тевенина или Нортона, представление двухпортовой схемы в уравнении (D.1) справедливо только для двух зажимов сети. Вся информация об откликах внутри двухпортового устройства теряется.
Пассивные линейные схемы являются двусторонними по своей природе, что непосредственно приводит к требованию взаимности. С точки зрения элементов Z-матрицы взаимность требует, чтобы
z12 = z21. (D.3)
Таким образом, для представления этого типа двухпортовой сети необходимо измерить только три независимых параметра.
D.3 Параметры проводимости короткого замыкания
Обратное уравнение Z-матрицы (D.1), когда оно существует, обеспечивает выражение для токов двух портов с точки зрения напряжений портов аналогично выражению эквивалентной схемы Нортона. Это двойное представление задается матрицей проводимости, или Y-матрицей, вида
 , (D.4)
, (D.4)где y12 = y21 для взаимных сетей. Как и в случае с Z-матрицей, отдельные элементы Y-матрицы могут быть найдены путем вычислений или измерений токов и напряжений отдельных портов, но на этот раз с короткозамкнутыми портами. Элементы задаются с помощью
 (D.5)
(D.5)D.4 Параметры цепи (ABCD)
Поскольку предполагается, что двухпортовая цепь является линейной, для описания ее поведения также могут использоваться другие комбинации напряжений и токов портов. Полезным набором параметров для цепочек, которые каскадируются вместе, являются параметры цепочки. Они также известны как ABCD или параметры передачи и определяются матричным выражением
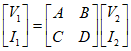
Расположение и ориентация напряжений и токов порта для параметров цепочки изображены на рисунке D.2. Стоит обратить внимание, что направление тока в порту 2 противоположно направлению, указанному в определениях параметров Z и Y, и этот ток обозначается как I2.
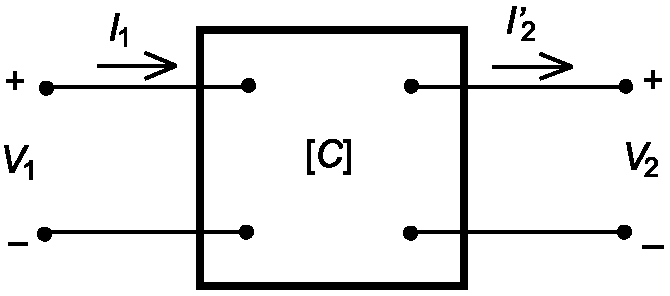
Рисунок D.2 - Определения напряжения
и тока для параметров цепочки
Как следствие предполагаемого взаимного характера двухпортового соединения, параметры цепочки удовлетворяют соотношению (AD - BC) = 1. Таким образом, как и в случае с Z- и Y-параметрами, для описания двухпортовой сети необходимы только три независимых параметра цепочки.
Наиболее полезная функция представления параметров цепочки заключается в обработке каскадных двухпортовых соединений, как изображено на рисунке D.3. С [C1] и [C2], представляющими матрицы параметров цепочки для сетей 1 и 2 на рисунке, общая матрица параметров цепочки для комбинированной схемы приведена в виде матричного произведения двух матриц параметров цепи.
[Ctot] = [C1][C2]. (D.7)
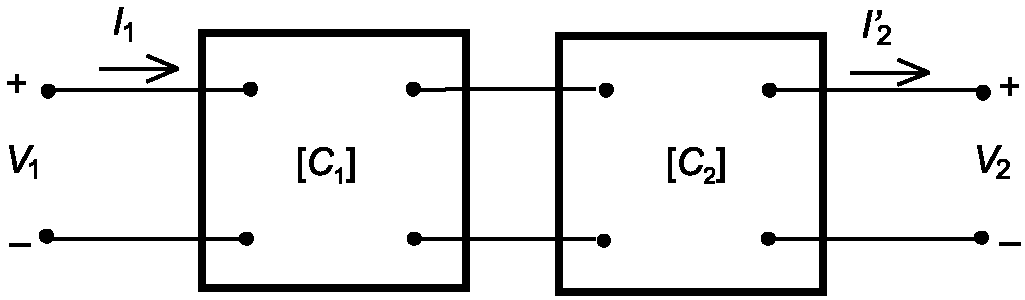
Эта концепция каскадирования отдельных цепочек вместе может быть применена к измерительной цепочке, содержащей как сосредоточенные цепи, так и распределенные цепочки, такие как линия передачи. Рассмотрим измерительную цепочку, изображенную на рисунке D.4, которая состоит из (слева направо на рисунке) датчика, устройства согласования, линии передачи, аттенюатора и импеданса нагрузки. Двухпортовые цепи для устройства согласования, линии передачи и аттенюатора представлены матрицами параметров цепочки [Cb], [Ct] и [Ca] соответственно. Применяя уравнение (D.6) к трем матрицам цепи, общую матрицу цепи можно определить как
и общую эквивалентную схему для измерительной цепочки можно представить, как изображено на рисунке D.5.
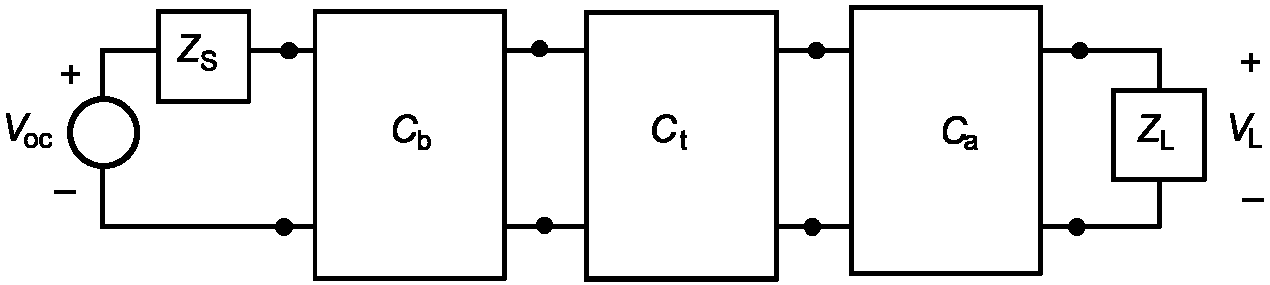
с использованием матриц параметров
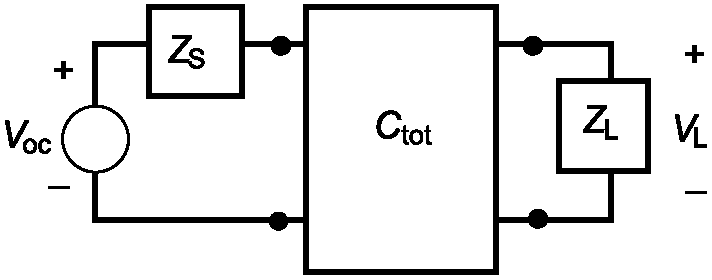
для измерительной цепочки
Анализ схемы на рисунке D.5 прост, и ток, протекающий через импеданс нагрузки ZL, может быть выражен через импеданс нагрузки, импеданс источника ZS и напряжение источника разомкнутой цепи Voc как
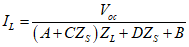 , (D.9)
, (D.9)где A, B, C и D - параметры цепочки для общей каскадной цепи. Напряжение на нагрузке задается
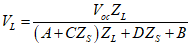
Конечно, в процессе измерения используется уравнение, обратное уравнению (D.10), поскольку измеряется отклик нагрузки VL и необходимо определить электрическое поле (которое связано с Voc-характеристиками датчика).
D.4.1 Параметры цепи для простых схем
Чтобы быть полезными при выполнении анализа, параметры цепи должны быть легко получены для общих схем. Таблица D.1, взятая из [D.1], суммирует параметры цепочки для нескольких простых двухпортовых цепей. С этими параметрами сложная схема может быть построена в виде простых последовательных и шунтирующих элементов, а общие параметры цепочки определяются серией матричных умножений, как в уравнении (D.6). Например, схема на рисунке D.6 содержит два последовательных элемента и один шунтирующий элемент. Общая матрица параметров цепочки для этой схемы выражается как

Эти параметры также полезны для обработки цепей лестничного типа, имеющих большое количество идентичных секций. Если параметры цепочки [C] для одной секции могут быть определены, то общая матрица параметров цепочки для n каскадных секций задается как [CT] = [CA]n.
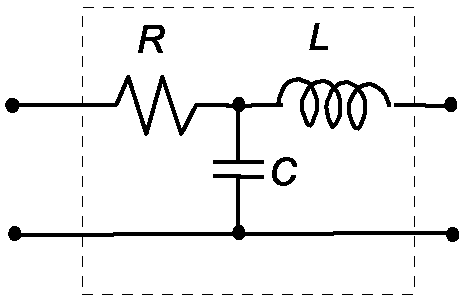
смоделированная с помощью параметров цепочки
Таблица D.1
Описание элемента схемы | Диаграмма схемы | Матрица цепи |
Последовательный импеданс | 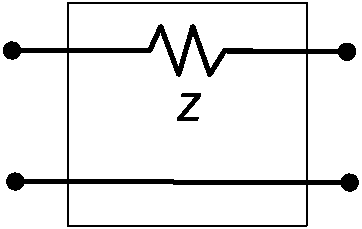 |  |
Полная проводимость шунта | 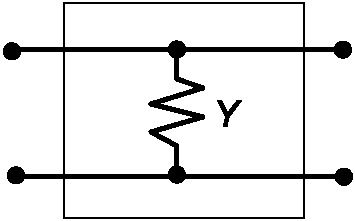 |  |
Идеальный трансформатор, соотношение витков 1:n | 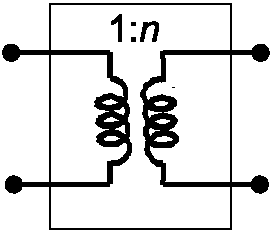 |  |
Индуктивная связь | 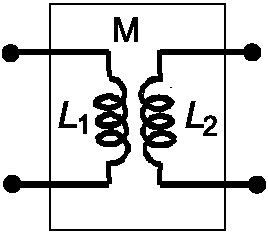 | 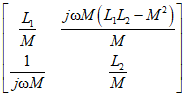 |
Примечание - Для взаимных сетей AD - BC = 1. | ||
Другая схема, представляющая интерес, это участок линии передачи длиной L, характеристическим сопротивлением Zc и постоянной распространения  . Как описывалось в [D.2], эта схема имеет представление параметров цепочки
. Как описывалось в [D.2], эта схема имеет представление параметров цепочки
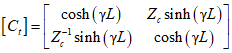
Важно понимать, что параметры Z, Y и цепочки двухпортовой цепи не могут быть заданы независимо, поскольку все они описывают одну и ту же схему. Для выражения одного набора параметров из другого могут быть выведены различные соотношения. В [D.1] представлена таблица для определения одного набора параметров из другого.
D.5 Параметры рассеяния
Хотя возможно непосредственно измерять различные параметры Z, Y или цепочки для одной из двухпортовых цепей в измерительной цепочке, существует еще одно двухпортовое представление, которое полезно и должно быть введено. Это представление матрицы рассеяния (или S-параметра). Хотя это представление предоставляет не больше информации, чем другие, оно особенно полезно, поскольку большинство общедоступных векторных анализаторов цепей позволяют непосредственно измерять эти параметры. Таким образом, измерения этих параметров могут привести непосредственно к параметрам цепочки для описания двух компонентов порта.
Параметры рассеяния соотносят входящие и исходящие волны напряжения на портах двухпортовой схемы. Эти параметры связаны матричным уравнением
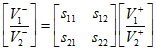
где  и
и  обозначают падающие волны напряжения на портах сети, а
обозначают падающие волны напряжения на портах сети, а  и
и  представляют отраженные волны напряжения на этих портах. Общее (или измеряемое) напряжение задается как сумма падающих и отраженных волн напряжения.
представляют отраженные волны напряжения на этих портах. Общее (или измеряемое) напряжение задается как сумма падающих и отраженных волн напряжения.
Отдельные элементы [S] матрицы (обозначенные как sij в уравнении (D.13)) определяются в предположении, что импедансы линий, соединяющих каждый порт, имеют известный уровень импеданса. Обычно используемое значение равно 50 Ом, хотя может быть использован любой другой импеданс. Таким образом, значения S-параметров зависят от уровня импеданса измерительного оборудования. Если бы использовался другой импеданс, результирующая [S] матрица была бы другой; однако можно показать, что соотношения V-I на зажимах устройства не зависят от уровня измеряемого импеданса для S-параметров.
Подробная процедура измерения параметров рассеяния приведена в руководствах пользователя для сетевых анализаторов и здесь не повторяется. Предполагается, что такие измерения могут быть выполнены и что пользователь получил четыре S-параметра с комплексным значением, которые описывают двухпортовый компонент общей цепочки измерений. Как и в случае с другими двухпортовыми параметрами, только три из S-параметров могут быть заданы независимо. Для пассивной взаимной сети можно показать, что S-матрица диагональна (т.е. s12 = s21). Этот факт служит возможной проверкой измерений S-параметров. Чтобы свести к минимуму небольшие ошибки в S-матрице, измеренные недиагональные члены sij могут быть усреднены как
 . (D.14)
. (D.14)Помимо проверки симметрии, описанной выше, к [S] может быть применена проверка энергетического баланса. Для схемы без потерь [S] матрица является унитарной, т.е. она удовлетворяет соотношению
[S]* = {[S]t}-1, (D.15)
где * обозначает комплексное сопряжение, а t - транспонирование матрицы. Это соотношение подразумевает, что для цепи без потерь строки [S] матрицы должны удовлетворять следующим выражениям:
 . (D.16)
. (D.16)Для случая цепи с потерями это выражение мощности больше не является идентификатором; оно становится верхней границей.
Как только S-матрица определена, матрица импеданса [Z] может быть определена как
где Zc - опорный уровень импеданса для определения параметров рассеяния (50 Ом в данном случае). Аналогично матрица допуска задается обратным уравнением (D.17).
Однако в данном случае более полезным является представление параметров цепочки с точки зрения S-параметров. Это может быть выражено в компонентной форме как
где A, B, C и D обозначают отдельные элементы в матрице цепи уравнения (D.6).
D.6 Список литературы
[D.1] TESCHE F.M. et al. EMC Analysis Methods and Computational Models. John Wiley and Sons, New York, January 1997
(справочное)
МЕЖГОСУДАРСТВЕННЫМ СТАНДАРТАМ
Таблица ДА.1
Обозначение и наименование международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
IEC 60050-161 | MOD | ГОСТ 30372-2017 (IEC 60050-161:1990) "Совместимость технических средство электромагнитная. Термины и определения" |
IEC 61000-2-9 | - | |
IEC 61000-2-10 | - | |
IEC 61000-4-20 | - | |
IEC 61000-4-23 | - | |
IEC 61000-4-25 | - | |
<*> Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - MOD - модифицированный стандарт. | ||
--------------------------------
<1> Действует ГОСТ IEC 61000-4-20-2014 "Электромагнитная совместимость. Часть 4-20. Методы испытаний и измерений. Испытания на помехоэмиссию и помехоустойчивость в TEM-волноводах", идентичный IEC 61000-4-20:2010.
NAHMAN N.J. Software Correction of Measured Pulse Data. In Fast Electrical and Optical Measurements, Vol. I, eds. I.E. Thompson and L.H. Luessen, Martinus Nijhoff, Dordrecht, 1986 pp. 351 - 418 | ||
CHENG D.K. Analysis of Linear Systems. Addison-Wesley, Inc., Reading Mass., 1959 | ||
BAUM C.E. Electromagnetic Topology for the Analysis and Design of Complex Electromagnetic Systems, in Fast Electrical and Optical Measurements, Vol I, eds. I.E. Thompson and L.H. Luessen, Martinus Nijhoff, Dordrecht, 1986, pp. 467 - 547 | ||
BAUM C.E. Accuracy Considerations in the Design of B-Dot and I-Dot Sensors". Sensor And Simulation Notes, Note 344, Kirtland AFB, New Mexico, June 1992 | ||
Antenna Engineering Handbook, 2nd Edition, eds. Richard C. Johnson and Henry Jasik, McGraw-Hill Company, New York, 1984, pp. 43 - 24 to 43 - 25 | ||
SOWER G.D. Standard Calibration Method For Electromagnetic Field Probes. Sensor and Simulation Notes, Note 362, Kirtland AFB, New Mexico, August 1993 | ||
BAUM C.E. Electromagnetic Sensors and Measurement Techniques, in Fast Electrical and Optical Measurements, Vol I, eds. I.E. Thompson and L.H. Luessen, Martinus Nijhoff, Dordrecht, 1986, pp. 73 - 144 | ||
TESCHE F.M., IANOZ M.V and Karlsson T. EMC Analysis Methods and Computational Models. John Wiley & Sons, New York, December, 1996 | ||
THALER G.J. and BROWN R.G. Analysis and Design of Feedback Control Systems. McGraw-Hill, New York, 1960 | ||
[9] | JOHNK R. and ONDREJKAA. Time-domain Calibrations of D-dot Sensors. U.S. National Institute of Standards and Technology Note 1392, February 1998 | |
[10] | IEC 61000-2-11 | Electromagnetic compatibility (EMC) - Part 2-11: Environment - Classification of HEMP environments (Электромагнитная совместимость (ЭМС). Часть 2-11. Условия окружающей среды. Классификация условий окружающей среды при электромагнитном импульсе от высотных (ядерных) взрывов (HEMP)) |
УДК 621.039.4:006.354 | IDT | |
Ключевые слова: ЭМП, измерительная цепочка, датчик свободного поля, параметры формы сигнала, датчик отклика | ||