СПРАВКА
Источник публикации
М.: ФГБУ "Информавтодор", 2023
Примечание к документу
Текст документа приведен в соответствии с публикацией на сайте https://rosavtodor.gov.ru/ по состоянию на 05.09.2023.
Документ рекомендован к применению в части, не противоречащей требованиям технического регламента Таможенного союза "Безопасность автомобильных дорог" (ТР ТС 014/2011) и действующим национальным стандартам Российской Федерации, Распоряжением Росавтодора от 24.12.2019 N 4462-р (ред. от 07.06.2023).
Название документа
"ОДМ 218.5.014-2019. Отраслевой дорожный методический документ. Методика контроля работоспособности и мониторинга метрологических характеристик комплексов автоматизированного весогабаритного контроля"
(издан на основании Распоряжения Росавтодора от 24.12.2019 N 4462-р)
"ОДМ 218.5.014-2019. Отраслевой дорожный методический документ. Методика контроля работоспособности и мониторинга метрологических характеристик комплексов автоматизированного весогабаритного контроля"
(издан на основании Распоряжения Росавтодора от 24.12.2019 N 4462-р)
Содержание
Распоряжения Федерального
дорожного агентства
от 24 декабря 2019 г. N 4462-р
ОТРАСЛЕВОЙ ДОРОЖНЫЙ МЕТОДИЧЕСКИЙ ДОКУМЕНТ
МЕТОДИКА КОНТРОЛЯ РАБОТОСПОСОБНОСТИ
И МОНИТОРИНГА МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК КОМПЛЕКСОВ
АВТОМАТИЗИРОВАННОГО ВЕСОГАБАРИТНОГО КОНТРОЛЯ
ОДМ 218.5.014-2019
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт метрологической службы" (ФГУП "ВНИИМС"); обществом с ограниченной ответственностью "Автоматизированные системы контроля "Экспресс" (ООО "АСК "Экспресс").
2 ВНЕСЕН Управлением строительства и эксплуатации автомобильных дорог Федерального дорожного агентства.
3 ИЗДАН на основании распоряжения Федерального дорожного агентства от 24.12.2019 N 4462-р.
4 ИМЕЕТ рекомендательный характер.
1.1 Настоящий отраслевой дорожный методический документ (далее - методический документ) разработан для применения органами управления дорожным хозяйством Российской Федерации при проведении работ по контролю и мониторингу работоспособности комплексов автоматизированного весогабаритного контроля (АВГК).
1.2 Под АВГК подразумевается набор технических средств, предназначенный для осуществления автоматического взвешивания в движении, автоматического определения габаритных размеров, идентификации транспортных средств (ТС), сохранения и передачи результатов измерений в уполномоченные органы для осуществления мероприятий в сфере государственного регулирования грузовых перевозок по дорогам общего пользования.
1.3 Данный методический документ устанавливает методы контроля работоспособности и мониторинга метрологических характеристик АВГК при измерении массы, осевых нагрузок и нагрузок групп осей (при необходимости) ТС, а также расстояний между осями, габаритных размеров и скорости движения автомобилей.
1.4 Методический документ содержит рекомендации по оценке работоспособности АВГК на основе анализа стабильности их метрологических характеристик.
В настоящем методическом документе использованы нормативные ссылки на следующие документы:
Технический регламент Таможенного союза "О безопасности колесных транспортных средств" (ТР ТС 018/2011)
ГОСТ 8.021-2015 Государственная система обеспечения единства измерений. Государственная поверочная схема для средств измерений массы
ГОСТ 8.417-2002 Государственная система обеспечения единства измерений. Единицы величин
ГОСТ 8.631-2013 (OIML R 60:2000) Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний
ГОСТ 22748-77 Автотранспортные средства. Номенклатура наружных размеров. Методы измерений
ГОСТ Р 8.726-2010 Датчики весоизмерительные. Общие технические требования. Методы испытаний
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: ГОСТ Р 27.102-2021 имеет название "Надежность в технике. Надежность объекта. Термины и определения". |
ГОСТ Р 27.102-2021 Надежность в технике. Термины и определения
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: имеется в виду ГОСТ 33987-2016, а не ГОСТ Р 33987-2016. |
ГОСТ Р 33987-2016 Транспортные средства колесные. Массы и размеры. Технические требования и методы испытаний
ГОСТ Р 52051-2003 Механические транспортные средства и прицепы. Классификация и определения
ГОСТ OIML R 76-1-2011 Государственная система обеспечения единства измерений. Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания
ГОСТ OIML R 111-1-2009 Государственная система обеспечения единства измерений. Гири классов E1, E2, F1, F2, M1, M1-2, M2, M2-3 и M3. Часть 1. Метрологические и технические требования
Примечание - При пользовании настоящим методическим документом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячным информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании данным методическим документом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
В настоящем документе применены следующие термины с соответствующими определениями.
3.1.1 весы: Измерительный прибор, применяемый для определения массы тела, использующий действие гравитации (силы притяжения) на это тело.
Примечания
1 В данном методическом документе термин "масса" (или "значение веса") предпочтительно использовать в смысле "условная масса" или "условное значение результата взвешивания в воздухе" в соответствии с ГОСТ OIML R 111-1-2009.
2 Принимая во внимание тот факт, что вес и масса тела физически и метрологически связаны между собой, для измерения предпочтительно использовать термин "вес" как физическое проявление массы.
3 Весы также могут быть использованы для определения других связанных с массой значений, величин, параметров или характеристик (например, осевой нагрузки или нагрузки от группы осей ТС).
4 В зависимости от режима работы весоизмерительные приборы подразделяются на автоматические и неавтоматические, от способа применения - на весы для статического взвешивания (статические) и весы для взвешивания в движении (динамические).
3.1.2 весы автоматического действия: Весы, которые осуществляют взвешивание без вмешательства оператора, следуя предопределенной программе автоматических действий, предусмотренных для данных весов.
3.1.3 весы автоматические для измерения массы автодорожных транспортных средств в движении (весы динамические): Автоматические весы, имеющие грузоприемное устройство и прилегающие подъездные пути, которые определяют массу и, если предназначены, осевые нагрузки, нагрузки от групп осей ТС, пока оно движется через грузоприемное устройство этих весов.
3.1.4 весы контрольные: Весы, используемые для определения опорных значений массы и если предназначены для статических нагрузок одиночных осей неподвижного контрольного ТС.
3.2.1 зона весового контроля: Зона, предназначенная для взвешивания в движении ТС, ограниченная соответствующими указателями, знаками, дорожной разметкой и оборудованная в соответствии с требованиями технической документации к динамическим весам.
3.2.2 зона взвешивания: Часть зоны весового контроля, содержащая грузоприемное устройство и подъездные участки до и после грузоприемного устройства, предназначенная для взвешивания в движении ТС.
3.2.3 подъездные участки: Часть зоны взвешивания, участки дороги, прилегающие с обеих сторон к грузоприемному устройству, обеспечивающие взвешиваемому ТС равномерное движение по прямой в одной плоскости.
3.2.4 грузоприемное устройство: Весоизмерительный модуль, стационарно встроенный в зону взвешивания, непосредственно воспринимающий нагрузку от колес ТС.
3.2.5 модуль: Идентифицируемая функциональная часть прибора, выполняющая определенную функцию или функции, которая может быть отдельно оценена в соответствии с определенными метрологическими и техническими требованиями.
Для модулей весов определены доли пределов погрешности.
Примечание - Типичные модули весов: весоизмерительный датчик, индикатор, устройство обработки данных и т.п.
3.2.6 весоизмерительный датчик: Модуль весов, предназначенный для преобразования воздействующей на него силы в другую физическую величину.
Примечание - Определение к данному термину установлено в ГОСТ Р 8.726-2010.
3.3.1 взвешивание целиком: Определение массы ТС, которое полностью находится на грузоприемном устройстве.
3.3.2 взвешивание по частям: Взвешивание ТС в два или более последовательных приема на одном и том же грузоприемном устройстве.
3.3.3 взвешивание в движении: Процесс определения массы ТС, осевых нагрузок и, если возможно, нагрузок от группы осей во время движения (т.е. во время пересечения транспортным средством грузоприемного устройства динамических весов) путем измерения и анализа динамических сил от колес ТС. Динамические весы регулируют таким образом, чтобы результат измерения суммарной динамической нагрузки от всех колес ТС на грузоприемное устройство весов, насколько возможно, соответствовал принятому опорному значению его массы.
Примечание - При взвешивании ТС в движении помимо гравитационного воздействия добавляются эффекты, связанные с инерционностью масс. Транспортные средства опираются на дорогу через упругие элементы подвески и шины колес. В движении под воздействием возмущающих факторов взаимодействие инерционной массы и упругих элементов приводит к сложным колебательным движениям всех упруго сочлененных частей ТС относительно друг друга и дороги. Дополнительное влияние на распределение нагрузки между осями оказывают ускорение или торможение, крутящий момент трансмиссии и сопротивление качению.
3.3.4 статическое взвешивание: Взвешивание, в процессе которого изменения нагрузки на грузоприемное устройство весов настолько малы, что ими можно пренебречь (т.е. взвешивание в условиях стабилизации показаний).
3.3.5 масса транспортного средства: Мера воздействия покоящегося транспортного средства на опору. Результат измерения силы воздействия на опору (веса) транспортного средства на весах, выраженный в единицах массы. Масса равна суммарной нагрузке всех колес статически уравновешенного неподвижного транспортного средства на дорогу.
3.3.6 нагрузка от колеса: Сумма нагрузок от всех шин, входящих в колесную сборку. Колесная сборка может иметь одну или две шины.
3.3.7 ось: Устройство, на которое опирается корпус ТС, включающее две или более колесных сборки с центрами вращения, лежащими приблизительно на одной линии, перпендикулярной к нормальному направлению движения транспортного средства.
3.3.8 группа сближенных осей: Сгруппированные оси, конструктивно объединенные и (или) не объединенные в тележку, с расстоянием до ближайшей оси до 2,5 м (включительно).
Примечание - Определение к данному термину установлено в приложении N 2 к Правилам перевозок грузов автомобильным транспортом [1].
3.3.9 осевая нагрузка: Часть веса транспортного средства, которая передается через ось на опорную поверхность (автомобильную дорогу, грузоприемное устройство), выраженная в единицах массы. Любая зарегистрированная осевая нагрузка должна рассматриваться как нагрузка от одной оси, даже если ось входит в группу осей.
3.3.10 нагрузка от группы осей: Суммарная нагрузка от всех осей, входящих в группу; часть веса транспортного средства, приходящаяся на группу осей, выраженная в единицах массы.
3.3.11 статическая нагрузка колеса: Часть статической нагрузки транспортного средства на дорогу, приходящаяся на колесо, выраженная в единицах массы.
Примечание - В отличие от массы транспортного средства нагрузка от колеса - величина, меняющаяся вследствие перераспределения нагрузок между колесами в зависимости от положения в пространстве точек опор каждого колеса, расположения центра тяжести ТС и наличия крутящего момента, передаваемого на заторможенные колеса.
3.3.12 идеальные условия измерений весовых параметров транспортных средств: Условия, когда измерение нагрузок на дорогу каждой части ТС происходит одновременно, а расторможенное транспортное средство с неизменным центром тяжести неподвижно расположено на идеально ровном горизонтальном участке дороги.
Примечание - Точность измерений весовых параметров ТС по частям зависит от приближения условий взвешивания к идеальным.
3.3.13 опорное значение статической нагрузки колеса: Значение статической нагрузки колеса, полученное при взвешивании ТС на контрольных весах в условиях, приближенных к идеальным, принятое за действительное значение, которое используют для сопоставления с результатами однократных измерений нагрузки от данного колеса в движении.
3.3.14 опорное значение статической осевой нагрузки: Значение статической осевой нагрузки, полученное при взвешивании ТС на контрольных весах в условиях, приближенных к идеальным, принятое за действительное значение, которое используют для сопоставления с результатами однократных измерений данной осевой нагрузки в движении.
3.3.15 опорное значение массы транспортного средства: Значение массы ТС, полученное при взвешивании на контрольных весах, принятое за действительное значение, которое используют для сопоставления с результатами однократных измерений в движении массы данного транспортного средства.
3.3.16 динамическая нагрузка колеса транспортного средства: Нагрузка колеса ТС, измеренная во время движения и выраженная в единицах массы.
3.3.17 динамическая осевая нагрузка транспортного средства: Осевая нагрузка ТС, измеренная во время движения и выраженная в единицах массы.
3.3.18 динамическая нагрузка транспортного средства: Суммарная динамическая нагрузка всех колес ТС на дорогу, измеренная во время движения и выраженная в единицах массы.
3.3.19 максимальная нагрузка: Наибольшая нагрузка на грузоприемное устройство при взвешивании.
3.3.20 минимальная нагрузка: Нагрузка на грузоприемное устройство при взвешивании, ниже которой результат взвешивания может содержать чрезмерную относительную погрешность.
3.3.21 диапазон взвешивания: Диапазон между максимальной и минимальной нагрузками.
3.3.22 цена деления: Значение, выраженное в единицах величины при измерении, которое является разницей между двумя последовательными показанными или напечатанными значениями.
3.3.23 цена деления для статической нагрузки: Значение, выраженное в единицах массы, при статическом взвешивании, которое является разницей между двумя последовательными показанными или напечатанными значениями.
3.4.1 рабочая скорость: Средняя скорость взвешиваемого ТС во время его движения через грузоприемное устройство. Средняя скорость вычисляется как среднее значение из зарегистрированных при взвешивании в движении значений скорости для каждой оси транспортного средства.
3.4.2 максимальная рабочая скорость: Наибольшая скорость ТС, для которой разработаны динамические весы и выше которой результаты взвешивания могут содержать чрезмерную относительную погрешность.
3.4.3 минимальная рабочая скорость: Наименьшая скорость ТС, для которой разработаны динамические весы и ниже которой результаты взвешивания могут содержать чрезмерную относительную погрешность.
3.4.4 диапазон рабочих скоростей: Любые значения от минимальной до максимальной рабочей скорости, при которых может быть произведено взвешивание ТС.
3.4.5 максимальная скорость проезда: Максимальная скорость, с которой ТС может проезжать зону взвешивания, не вызывая изменений установленных характеристик весов.
3.4.6 ускорение: Отношение изменения скорости ТС ко времени, за которое это изменение произошло; может быть положительным при разгоне и отрицательным при торможении.
3.5.1 погрешность средства измерений: Разность между показанием средства измерений и опорным (действительным) значением физической величины.
3.5.2 основная погрешность: Погрешность средства измерений, применяемого в нормальных условиях.
3.5.3 первоначальная основная погрешность: Основная погрешность средства измерений, определенная до проведения эксплуатационных испытаний и оценки долговечности.
3.5.4 предел допускаемой погрешности: Наибольшее значение погрешности средств измерений, устанавливаемое нормативным документом для данного типа средств измерений, при котором оно еще признается годным к применению.
3.5.5 предел допускаемого отклонения: Максимальное допускаемое отклонение осевой нагрузки или, если применимо, нагрузки от группы осей, измеренной в движении ТС от соответствующего опорного значения статической осевой нагрузки или нагрузки от группы осей.
Примечание - Понятие погрешности применимо к сравнению результата измерения и опорного значения одной и той же величины. Осевая нагрузка, измеренная в движении ТС, и статическая осевая нагрузка - разные измеряемые величины. При взвешивании в движении результат измерения динамической осевой нагрузки следует рассматривать как значение, позволяющее с некоторой точностью оценить статическую осевую нагрузку данного транспортного средства. Отклонение значения динамической осевой нагрузки от значения статической осевой нагрузки автомобиля является погрешностью метода измерений.
3.5.6 размах результатов измерений в условиях повторяемости: Оценка рассеяния результатов единичных измерений физической величины Rn в условиях повторяемости, образующих ряд (или выборку из n измерений).
Примечания
1 Оценка рассеяния результатов единичных измерений физической величины определяется по формуле
Rn = xmax - xmin,
где xmax и xmin - соответственно наибольшее и наименьшее значения физической величины в данном ряду измерений.
2 Рассеяние обычно обусловлено проявлением случайных причин при измерении и носит вероятностный характер.
3 Условия повторяемости измерений включают:
- одну и ту же процедуру измерения;
- одного и того же оператора;
- один и тот же измерительный прибор, используемый при тех же самых условиях;
- одно и то же местоположение;
- проведение серии измерений за короткий период времени.
3.5.7 регулировка: Совокупность операций по доведению метрологических характеристик динамических весов, включая их погрешность, до значений, соответствующих метрологическим и техническим требованиям, предъявляемым к этим весам.
3.5.8 погрешность измерения массы транспортного средства при взвешивании в движении: Разность между значением динамической нагрузки ТС, измеренным в движении, и опорным значением его массы.
3.5.9 уровень доверия: Вероятность того, что совокупность истинных значений измеряемой величины находится вокруг измеренного значения в интервале, ограниченном пределами доверительных границ погрешности.
3.5.10 доверительные границы погрешности: Верхняя и нижняя границы интервала, внутри которого с заданной вероятностью находится значение погрешности измерений.
3.5.11 пределы доверительной погрешности: Разница между верхней или нижней границей интервала, внутри которого с заданной вероятностью находится значение погрешности измерений, и измеренным значением.
3.5.12 пределы относительной доверительной погрешности (от измеренного значения  ): Отношение предела доверительной погрешности измерений к измеренному значению величины, выраженное в процентах.
): Отношение предела доверительной погрешности измерений к измеренному значению величины, выраженное в процентах.
Примечания
1 Пределы относительной доверительной погрешности рассчитывают по формуле
 ,
,где  - предел доверительной погрешности измерения;
- предел доверительной погрешности измерения;
X - измеренное значение величины.
2 При однократных измерениях пределы доверительной погрешности измерения  вычисляют по формуле
вычисляют по формуле
 .
.3.5.13 границы доверительного интервала отклонений осевых нагрузок: Верхняя и нижняя границы интервала, внутри которого с заданной вероятностью находятся значения отклонений осевых нагрузок ТС, измеренных в движении, от соответствующих опорных значений статических осевых нагрузок.
3.6.1 влияющая физическая величина (влияющая величина): Физическая величина, оказывающая влияние на размер измеряемой величины и (или) результат измерений.
3.6.2 влияющий фактор: Влияющая величина, имеющая значение в пределах рабочих условий измерений.
3.6.3 рабочие условия измерений: Условия измерений, при которых значения влияющих величин находятся в пределах, в которых нормируют дополнительную погрешность или изменение показаний средства измерений.
3.6.4 нормальные условия измерений: Условия измерений, характеризуемые совокупностью значений или областей значений влияющих величин, при которых изменением результата измерений пренебрегают вследствие малости.
3.7.1 транспортное средство: Наземное механическое устройство на колесном ходу категорий L, M, N, O, предназначенное для эксплуатации на автомобильных дорогах общего пользования.
Примечание - Определение данного термина установлено в ТР ТС 018/2011, классификация транспортных средств дана в ГОСТ Р 52051-2003.
3.7.2 транспортное средство, предназначенное для перевозки грузов, категории N: Механическое транспортное средство, имеющее не менее четырех колес и предназначенное для перевозки грузов массой до 3,5 т (категория N 1), от 3,5 до 12 т (категория N 2), свыше 12 т (категория N 3).
3.7.3 жесткое транспортное средство: Одиночное ТС категории N, имеющее зависимую подвеску с жесткой связью колес одной оси, оборудованное нерегулируемыми упругими элементами подвески (например, рессорами или пружинами).
3.7.4 контрольное транспортное средство: Порожнее или груженое одиночное ТС категории N или автопоезд, состоящий из комбинации ТС категорий N и O, для которого известны опорные значения массы, статических осевых нагрузок или нагрузок от группы осей.
3.7.5 габаритные размеры транспортного средства: Длина, высота и ширина наименьшего прямоугольного параллелепипеда, в который можно вписать форму ТС.
Перед началом работ по контролю и мониторингу работоспособности АВГК следует убедиться в том, что условия окружающей среды приемлемы и соответствуют условиям эксплуатации АВГК, приведенным в эксплуатационной документации.
4.2.1 Рабочий диапазон температур и влажности воздуха окружающей среды, в котором АВГК должны сохранять свои технические и метрологические характеристики, устанавливается изготовителем и указан в эксплуатационной документации на АВГК.
4.2.2 Если эксплуатационной документацией предусмотрено, что атмосферные осадки (сильный дождь, снег, обледенение дорожного покрытия) могут привести АВГК в состояние, когда погрешность измерений превышает установленные пределы и такие результаты измерений в базе данных помечаются как недостоверные, то проверка работоспособности при данных условиях окружающей среды не проводится.
4.2.3 Контроль климатических факторов должен осуществляться с использованием средств видеонаблюдения и контроля температуры грузоприемного устройства, являющихся неотъемлемой частью АВГК, или автоматических метеорологических станций, расположенных в непосредственной близости от зоны весового контроля, или другими средствами контроля (пределы допускаемой погрешности измерений температуры окружающего воздуха не более +/- 1 °C, влажности окружающего воздуха не более +/- 3%).
4.3.1 Метрологическим требованиям АВГК должны удовлетворять, если напряжение электропитания отличается от номинального Unom или находится в диапазоне напряжений Umin - Umax при питании:
- нижний предел отклонения равен 0,85Unom,
- верхний предел - 1,1Unom;
- нижний предел равен минимальному рабочему напряжению Umin,
- верхний предел - 1,2Unom (для автономного перезаряжаемого источника питания);
- нижний предел равен минимальному рабочему напряжению Umin,
- верхний предел - Unom или Umax (напряжение нового или полностью заряженного источника питания, указанного для этого типа источника питания изготовителем).
Примечание - Минимальное рабочее напряжение определяют как самое низкое из возможных рабочих напряжений, прежде чем АВГК автоматически выключаются.
4.3.2 Комплексы автоматизированного весогабаритного контроля с питанием от автономного источника или от сети постоянного тока при значении напряжения электропитания ниже установленного изготовителем должны продолжать корректно работать либо не должны выдавать результат взвешивания.
4.4.1 Зона взвешивания на протяжении 100 м до и 50 м после грузоподъемного устройства (ГПУ) должна отвечать следующим требованиям:
- горизонтальной > 1000 м,
- вертикальной > 5000 м.
4.4.2 Неровность поверхности дорожного покрытия в зоне взвешивания в поперечном и продольном направлениях должна соответствовать требованиям эксплуатационной документации на АВГК и не превышать нормативные показатели.
5.1.1 В данном разделе приведены методы контроля работоспособности и мониторинга метрологических характеристик АВГК, находящихся в эксплуатации.
5.1.2 Контроль работоспособности АВГК необходимо проводить согласно утвержденному графику проверок или при обнаружении неисправности, но не реже одного раза в квартал.
5.1.3 Для фиксации и визуализации результатов измерений при контроле метрологических характеристик АВГК может возникнуть необходимость подключения к комплексу непосредственно на месте эксплуатации переносного компьютера (например, ноутбука или планшетного компьютера) через интерфейс связи. В качестве альтернативы может быть предусмотрена возможность вывода всех необходимых результатов измерений на печатающее устройство.
5.2 Контроль работоспособности АВГК в эксплуатации сличением с результатами взвешивания на контрольных весах в режиме статического поосного взвешивания
5.2.1 Общие положения
5.2.1.1 Процедура оценки работоспособности АВГК проводится путем контрольного взвешивания ТС до или после однократного взвешивания на АВГК. Контрольное ТС выбирается из транспортного потока на данном участке дороги. Оно должно проехать через зону взвешивания АВГК со скоростью в пределах рабочего диапазона скоростей, установленного для комплекса.
5.2.1.2 Оценка погрешности при однократном измерении контрольного ТС на АВГК осуществляется методом сравнения с опорными значениями, полученными на стационарных или переносных весах для статического поосного взвешивания ТС, которые должны быть утвержденного типа, иметь действительное свидетельство о поверке и соответствовать допустимым погрешностям, не превышающим 1/3 от пределов допускаемой погрешности АВГК.
5.2.1.3 При использовании контрольных весов должны соблюдаться порядок и правила работ, установленные в эксплуатационной документации.
5.2.2.1 Контрольное ТС располагают в зоне взвешивания контрольных весов перед ГПУ. По команде оператора весов устанавливают первую ось ТС на ГПУ весов. Колеса должны находиться на поверхности ГПУ. При этом педаль тормоза ТС должна быть отпущена, а стояночный тормоз не задействован. Для предотвращения перемещения колес ТС по ГПУ в момент взвешивания можно использовать противооткатные устройства (башмаки).
5.2.2.2 Измерение осевой нагрузки не должны выполнять до того момента, пока колебания, вызванные силой инерции (например, переливанием жидкости), не уменьшатся до такой степени, что показания будут меняться менее чем на три цены деления весов в течение 3 с. После фиксации показаний осевой нагрузки ТС следует переместить следующей осью на ГПУ. Установку оси проводят при движении ТС вперед. Если ТС проехало дальше, чем требуется для взвешивания оси, то его необходимо переместить назад до полного съезда оси с ГПУ. Повторно, при движении вперед, устанавливают эту же ось на ГПУ.
Примечание - Как правило, современные весы имеют функцию автоматической установки нуля и (или) слежения за нулем. Необходимость и процедура установки нулевых показаний весов после разгружения ГПУ определяется функциональными возможностями весов и выполняется в соответствии с методикой измерений, указанной в эксплуатационной документации на весы.
5.2.2.3 Масса ТС вычисляется, как сумма измеренных значений нагрузок всех его колес или осей, измеренные значения заносят в таблицу А.1 протокола, форма которого приведена в приложении А, и принимаются за опорные значения.
5.2.3.1 Для измерения массы и осевых нагрузок ТС могут быть использованы контрольные переносные весы, ГПУ которых состоит из двух или более (по количеству колес ТС) платформ.
5.2.3.2 Взвешивание ТС на контрольных весах, ГПУ которых состоит из платформ в количестве не менее числа колес взвешиваемого ТС, проводят при установке платформ под каждое колесо ТС. Педаль тормоза ТС должна быть отпущена, стояночный тормоз не задействован. Для предотвращения перемещения колес ТС по ГПУ в момент взвешивания допускается использовать противооткатные устройства (башмаки).
5.2.3.3 Во время взвешивания все колеса взвешиваемого ТС должны находиться в пределах +/- 3 мм от горизонтальной плоскости, проходящей через поверхность ГПУ весов.
5.2.3.4 Контроль отклонений от горизонтальной плоскости поверхности ГПУ весов осуществляют с помощью универсальной дорожной линейки, клина промерника и, если необходимо, нивелира с рейкой.
Чтобы обеспечить расположение поверхности колес в одной плоскости в установленных пределах, допускается использовать дополнительные подкладки и вставки.
5.2.3.5 Измерение массы и осевых нагрузок не должны выполнять до того момента, пока колебания, вызванные силой инерции (например, переливанием жидкости), не уменьшатся до такой степени, что показания будут меняться менее чем на три цены деления весов в течение 3 с.
5.2.3.6 Определение опорного значения массы ТС на контрольных весах, ГПУ которых состоит из двух платформ, следует проводить согласно аттестованной методике измерений для этого типа весов.
5.2.3.7 Нагрузку группы осей определяют при одновременной установке всех осей, входящих в группу, на ГПУ весов или при последовательной установке каждой оси данной группы на ГПУ весов для поосного взвешивания.
5.2.3.8 Последовательная установка оси ТС или ТС целиком на ГПУ должна проводиться при движении ТС вперед.
После фиксации показаний ТС необходимо переместить для следующего взвешивания.
Масса ТС при последовательном взвешивании нагрузки каждой оси вычисляется как сумма нагрузок всех его колес или осей.
5.2.3.9 Каждое контрольное ТС должно быть взвешено не менее трех раз. Результаты измерений заносят в таблицу А.2 протокола, форма которого приведена в приложении А.
5.2.3.10 Среднее арифметическое измеренных значений осевых нагрузок и массы ТС вычисляют по формуле
 (1)
(1)где  - среднее значение ряда измерений (округленное с точностью до цены деления);
- среднее значение ряда измерений (округленное с точностью до цены деления);
Ij - результат j-го однократного измерения;
L - число однократных измерений.
Затем рассчитывают и заносят в таблицу А.3 (приложения А) относительное отклонение  (округляется до целого числа) от среднего значения для каждого измеренного результата, которое использовалось при расчете средней величины по формуле
(округляется до целого числа) от среднего значения для каждого измеренного результата, которое использовалось при расчете средней величины по формуле
5.2.3.11 Из полученных по формуле (2) значений определяют максимальное абсолютное (без учета знака) значение  и заносят в соответствующую графу таблицы А.3 приложения А.
и заносят в соответствующую графу таблицы А.3 приложения А.
и заносят в соответствующую графу таблицы А.3 приложения А.Проверяют выполнение условия  , где
, где  - установленный для АВГК предел относительной погрешности измерений весовых параметров ТС.
- установленный для АВГК предел относительной погрешности измерений весовых параметров ТС.
, где 5.2.3.12 Если условие согласно подпункту 5.2.3.11 выполняется, используют рассчитанное среднее арифметическое значение осевой нагрузки, нагрузки от группы осей и массы контрольного ТС в качестве опорных значений, с которыми сравнивают результат измерений АВГК. Полученные опорные значения заносят в таблицу А.1 протокола (приложение А).
5.2.3.13 Если условие согласно подпункту 5.2.3.11 не выполняется, необходимо провести проверку и при необходимости регулировку положения опорных поверхностей под колесами ТС во время взвешивания. После устранения отклонений опорных поверхностей от горизонтальной плоскости следует повторить действия согласно подпунктам 5.2.3.8 - 5.2.3.12.
5.2.4.1 Взвешивание ТС на АВГК должно быть произведено в рабочем диапазоне скоростей средства измерения. Опорные значения параметров каждого контрольного ТС определяют согласно пунктам 5.2.2 и 5.2.3.
5.2.4.2 Рекомендуется в число контрольных включить ТС, которые наиболее характерны для данного участка дороги. По мере возможности среди контрольных ТС должны быть:
- двухосного седельного тягача и трехосного полуприцепа,
- трехосного седельного тягача и трехосного полуприцепа,
- трехосного тягача и трехосного прицепа.
В число контрольных рекомендуется включить одиночные четырехосные ТС и автопоезда с числом осей больше шести, если они встречаются.
5.2.4.3 Полученные результаты измерений и результаты их обработки при оценке погрешности измерений АВГК заносят соответственно в таблицы А.3 и А.4 (приложения А) для каждого класса ТС (двухосные, трехосные, пятиосные и т.д.) отдельно.
5.2.4.4 Необходимый объем выборки результатов однократных измерений рассчитывают отдельно для каждого класса ТС (двухосные, трехосные, пятиосные и т.д.), на который должен быть составлен протокол измерений по форме таблицы А.1 (приложение А).
5.2.4.5 Репрезентативность выборки результатов однократных измерений ТС одного класса (двухосные, трехосные, пятиосные и т.д.) на АВГК с последующим контрольным статическим взвешиванием с целью получения достоверных статистических оценок погрешности измерений АВГК подтверждается при выполнении условия
где L - текущий объем выборки измерений;
n - расчетный объем репрезентативной выборки измерений, округленный до целого значения,
 , (4)
, (4)k0 - коэффициент охвата, принятый равным 3, для доверительной вероятности 0,99;
S - среднее квадратическое отклонение выборки значений относительной погрешности однократных измерений весовых параметров ТС
 (5)
(5) ; (6)
; (6) (7)
(7)Ij - результат однократного измерения в движении на АВГК;
Ir,j - соответствующее опорное значение массы, или осевой нагрузки, или нагрузки от группы осей, полученное на контрольных весах в режиме статического взвешивания.
5.2.4.6 Объем выборки n должен быть в диапазоне от 9 до 20 измерений включительно. При достижении числа L однократных измерений, равного 9, проверяют условие (3) для каждой оси и массы ТС одного класса. Если условие не выполняется, продолжают проводить контрольные взвешивания с последующей проверкой условия. При выполнении условия (3) или достижении максимального объема выборки для АВГК вычисляют доверительные границы погрешности измерений массы или границы доверительного интервала отклонений осевых нагрузок ТС по формуле
 , (8)
, (8)где k0 - коэффициент охвата, равный 2, для доверительной вероятности 95%.
5.2.4.7 Сравнивают рассчитанные доверительные границы погрешности измерений с пределами погрешности измерений АВГК.
Если экспериментально определенная оценка доверительных границ относительной погрешности измерений массы и границ доверительного интервала отклонений осевых нагрузок ТС не превышает соответствующих установленных для АВГК пределов допускаемых погрешностей измерений, то АВГК признается работоспособным. В противном случае АВГК считается неработоспособным.
5.3 Контроль работоспособности и мониторинг метрологических характеристик АВГК на основе сравнения показаний датчиков силы (измерительных преобразователей)
5.3.1 Конструкция АВГК имеет две или более линий взвешивания. Линия взвешивания представляет собой несколько линейных датчиков, расположенных в одну линию перпендикулярно дороге. Линии взвешивания располагаются на некотором расстоянии друг от друга, что позволяет дополнительно, кроме измерения нагрузок от колес, определять скорость движения ТС и соответственно расстояния между осями.
5.3.2 Результатом измерения АВГК является усредненное значение результатов измерений осевой нагрузки одной оси с каждой линии взвешивания.
5.3.3 Метод заключается в оценке результатов измерений каждой линии взвешивания в отдельности.
Работоспособность АВГК может быть проверена с помощью оценки:
- систематического относительного отклонения и неопределенности относительных отклонений результатов измерений осевых нагрузок с каждой линии взвешивания от значений, принятых за результат измерения;
- относительной неопределенности измерений осевых нагрузок.
Указанные выше оценки должны быть получены на основе анализа результатов измерений не менее 50 ТС.
5.3.4 Данный метод может быть реализован только на АВГК со встроенным программным обеспечением, позволяющим получать результаты измерений с каждой линии датчиков, и использоваться для непрерывного контроля работоспособности АВГК в автоматическом режиме.
5.3.5 Результаты измерений осевых нагрузок ТС с линий датчиков и их обработки заносят в таблицу Б.1 приложения Б.
5.3.6 Критерии оценки стабильности метрологических характеристик АВГК. Критерием работоспособности АВГК является соотношение между систематическим относительным отклонением результатов измерений с каждой линии взвешивания и неопределенностью относительных отклонений результатов измерений осевых нагрузок с каждой линии взвешивания от значений, принятых за результат измерения. Если систематические относительные отклонения результатов измерений с линии взвешивания превышают половину их неопределенности, то такой АВГК признается неработоспособным.
5.3.7 Относительное отклонение результатов измерений с каждой линии взвешивания вычисляют по формуле
 , (9)
, (9)где  - значение относительного отклонения результата измерения осевой нагрузки с z-й линии от измеренного значения для j-й оси;
- значение относительного отклонения результата измерения осевой нагрузки с z-й линии от измеренного значения для j-й оси;
Ii,j - результат измерения осевой нагрузки с i-й линии для j-й оси;
Ir,j - результат измерения АВГК осевой нагрузки j-й оси.
5.3.8 Систематическое относительное отклонение измерений с i-й линии рассчитывают по формуле
 (10)
(10)где L - число измерений осей в выборке.
5.3.9 Неопределенность относительных отклонений результатов измерений осевых нагрузок с i-й линии взвешивания находят по формуле
 (11)
(11)5.3.10 Относительную неопределенность измерений осевых нагрузок вычисляют по формуле
где N - число линий взвешивания АВГК.
Для АВГК с двумя линиями датчиков формула (12) принимает вид
 . (13)
. (13)5.3.11 Расширенную относительную неопределенность результатов измерений осевых нагрузок с каждой линии взвешивания рассчитывают по формуле
 , (14)
, (14)где k0 - коэффициент охвата, принятый равным 2, для доверительной вероятности 95%.
5.3.12 При определении критериев работоспособности АВГК проверяют выполнение следующих условий:
-  ;
;
;-  .
.
.5.3.13 В случае если не выполняется хотя бы одно из условий, то необходимо провести проверку согласно подразделу 5.2, по результатам которой может быть сделан вывод о работоспособности данного АВГК.
5.4 Мониторинг работоспособности АВГК на основе оценки расхождений результатов взвешивания одних и тех же транспортных средств на различных АВГК
5.4.1 Метод мониторинга работоспособности АВГК применяется для информирования о возможной неработоспособности комплекса и может быть реализован с помощью автоматизированной информационно-вычислительной системы (АИВС).
5.4.2 Результаты измерений, полученные на различных АВГК, необходимо занести в соответствующие протоколы, формы которых приведены в приложении В.
5.4.3 Автоматизированная информационно-вычислительная система должна решать следующие задачи:
- сбор, хранение и обработка измерительной информации от АВГК и стационарного пункта весового контроля (СПВК), в том числе идентификационные данные ТС;
- отслеживание ТС, параметры которых были измерены несколькими АВГК за один рейс;
- обработка данных в соответствии с алгоритмами согласно пункту 5.4.4;
- выявление потенциально неработоспособных АВГК;
- автоматическое информирование о достижении критических параметров работоспособности АВГК.
- фиксация событий, под которыми понимается обнаружение факта проезда одного и того же ТС через как минимум три АВГК за один рейс; при этом результаты измерений должны быть получены при рабочих условиях эксплуатации АВГК;
- формирование перечня ТС одного типа (категории), преодолевших путь от одного АВГК до другого за период времени, отличающийся от среднего периода времени, характерного для данного участка, и с учетом времени года не более чем на 20%. В данный перечень также могут быть включены ТС, осуществляющие международные перевозки, на основании данных таможенной службы о выданных разрешительных документах CarnetTIR, в которых установлен маршрут движения ТС, проходящий через три и более АВГК;
- вычисление средних значений одноименных весовых и габаритных параметров, а также расстояний между осями одного и того же ТС, полученных от различных АВГК;
- определение относительных отклонений от среднего значения одноименных весовых и габаритных параметров, а также расстояний между осями данного ТС для каждого АВГК;
- сравнение относительных отклонений весовых и габаритных параметров, а также расстояний между осями ТС с пределами допускаемой погрешности измерений, установленных для каждого АВГК;
- в случае выявления превышения относительных отклонений весовых или габаритных параметров, а также расстояний между осями ТС пределов допускаемой погрешности АВГК АИВС формирует сообщение о возможном нарушении работоспособности соответствующего АВГК.
5.4.5 Для повышения достоверности полученного результата, предупреждающего о возможной неработоспособности АВГК, рекомендуется провести работы по контролю работоспособности и мониторингу метрологических характеристик АВГК при измерениях:
- весовых параметров ТС согласно подразделу 5.2;
- габаритных размеров ТС в соответствии с подразделом 5.6;
- расстояний между осями ТС согласно подразделу 5.7.
5.4.6 Пример структурной схемы АИВС приведен ниже.

Рисунок 1 - Пример структурной схемы АИВС
5.5.1 Общие положения
5.5.1.1 Передвижное устройство (ПУ) представляет собой специализированное транспортное средство, состоящее из четырехосного тягача, оборудованного бортовым компьютером, системой ГЛОНАСС/GPS, крано-манипуляторным устройством и трехосным прицепом, который имеет две инструментальные и одну подъемную оси. Тягач и прицеп укомплектовываются эталонными грузами (гирями) в количестве, необходимом для проверки работоспособности АВГК.
5.5.1.2 При проезде инструментальной оси через весоизмерительный датчик АВГК производится синхронизация данных между инструментальными осями ПУ и полученными данными комплекса. Синхронизация между инструментальными осями и АВГК может осуществляться с помощью приемника глобальной спутниковой системы ГЛОНАСС/GPS повышенной точности с дополнительными средствами (например, дифференциальные навигационные системы (ДНСС), спутниковые дифференциальные подсистемы WAAS, EGNOS, MSAS) или иного оборудования, обеспечивающего высокую точность. Каждому результату измерений АВГК и данным инструментальных осей ПУ с помощью приемника глобальной спутниковой системы ГЛОНАСС/GPS присваиваются точные метки времени, а также координаты АВГК и инструментальных осей ПУ. Данные, полученные от АВГК, по беспроводному интерфейсу связи или иным возможным способом, обеспечивающим безопасность передачи данных, передаются на бортовой компьютер.
5.5.1.3 Кузов тягача оборудован выдвижными штангами для имитации негабаритности ТС.
Инструментальные оси должны быть оснащены весоизмерительными датчиками для определения весовых параметров прицепа и акселерометрами для определения ускорения колес в момент проезда через ГПУ АВГК.
5.5.2 Порядок транспортировки ПУ к месту установки АВГК
Гири должны быть равномерно распределены в тягаче и прицепе ПУ. Во избежание превышения допустимых значений осевых нагрузок на дорожное полотно в пути следования до места установки АВГК подъемная ось ПУ должна быть опущена.
5.5.3.1 Воспроизведение минимального значения осевой нагрузки
Гири, установленные в прицепе, при помощи крано-манипуляторного устройства перемещаются в кузов тягача.
При этом подъемная ось прицепа может быть опущена (рисунок 2а) или поднята (рисунок 2б) в зависимости от значения минимальной осевой нагрузки, установленного в эксплуатационной документации АВГК, которое необходимо воспроизвести.
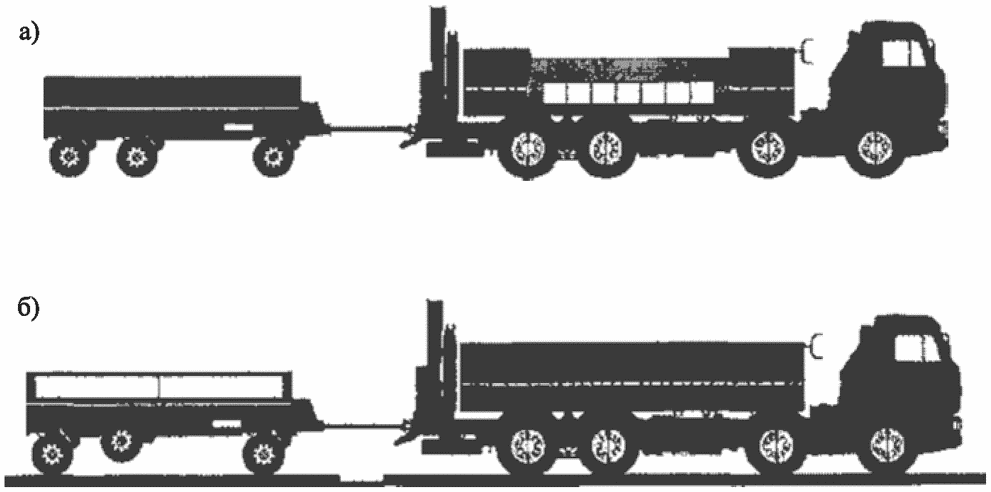
и подъемной оси (а, б)
5.5.3.2 Воспроизведение максимальной и прочих осевых нагрузок
При помощи крано-манипуляторного устройства в дополнение к гирям, установленным в прицепе, перемещаются гири, установленные в кузове тягача, в необходимом количестве для обеспечения воспроизведения инструментальной осью значения максимальной осевой нагрузки. Подъемная ось прицепа должна быть поднята (см. рисунок 2б).
Для воспроизведения значений осевых нагрузок, находящихся в диапазоне между минимальной и максимальной нагрузками, установленными в эксплуатационной документации АВГК, необходимо опустить подъемную ось прицепа (см. рисунок 2а).
5.5.3.3 Передвижное устройство. Имитация различных классов транспортных средств
Передвижное устройство должно быть сконструировано таким образом, чтобы, манипулируя прицепом и его подъемной осью, можно было сымитировать проезд нескольких различных классов ТС, таких как одиночное четырехосное ТС (рисунок 3), автопоезд в составе четырехосного тягача и двухосного прицепа (см. рисунок 2б), автопоезд в составе четырехосного тягача и трехосного прицепа (см. рисунок 2а).

Рисунок 3 - Схематичное изображение передвижного устройства
Для каждого сымитированного класса ТС и способа загрузки должны быть определены опорные значения весовых параметров в соответствии с пунктом 5.2.2 или 5.2.3 либо путем взвешивания на контрольных весах, входящих в комплектацию ПУ, согласно эксплуатационной документации и (или) методики измерений на эти весы.
Опорные значения весовых параметров заносят в протокол, форма которого приведена в приложении Г.
5.5.4 Количество проездов передвижного устройства
Количество однократных проездов ПУ с целью проверки работоспособности АВГК определяется при последовательном выполнении положений пункта 5.5.3 и должно отвечать требованиям репрезентативности, установленным в пункте 5.2.4. При этом каждое положение пункта 5.5.3 должно быть выполнено при равномерном движении ПУ с минимальной, средней и максимальной скоростью в рабочем диапазоне скоростей, установленном для данного АВГК, а также с учетом предельного значения скорости, установленного на данном участке дороги.
5.5.5 Обработка результатов измерений
5.5.5.1 Полученные данные измерений осевой нагрузки и массы ПУ обрабатываются бортовым компьютером устройства, и определяются текущие метрологические характеристики АВГК по формуле
 , (15)
, (15)где  - значение относительной погрешности от опорного значения осевой нагрузки, полученное для инструментальной оси или массы ПУ;
- значение относительной погрешности от опорного значения осевой нагрузки, полученное для инструментальной оси или массы ПУ;
Ii - результат однократного измерения в движении на АВГК;
Ir,i - соответствующее опорное значение статической осевой нагрузки, полученное для инструментальной оси или массы ПУ.
5.5.5.2 Значение  не должно превышать пределы допускаемых погрешностей измерений осевых нагрузок и массы, установленных в эксплуатационной документации АВГК.
не должно превышать пределы допускаемых погрешностей измерений осевых нагрузок и массы, установленных в эксплуатационной документации АВГК.
5.5.5.3 В случае обнаружения расхождений между результатами измерений АВГК и соответствующими данными инструментальных осей на величину, превышающую пределы допускаемых погрешностей, установленных в эксплуатационной документации АВГК  , на дисплей бортового компьютера ПУ должно быть выведено сообщение о выявленном несоответствии. В дополнение к этому, а также на перспективу развития и автоматизации системы контроля АВГК информацию о выявленном несоответствии рекомендуется передавать на сервер АВГК с последующим выводом сообщения на дисплей ответственного за обслуживание данного АВГК, которое содержит информацию о АВГК и результаты проезда ПУ.
, на дисплей бортового компьютера ПУ должно быть выведено сообщение о выявленном несоответствии. В дополнение к этому, а также на перспективу развития и автоматизации системы контроля АВГК информацию о выявленном несоответствии рекомендуется передавать на сервер АВГК с последующим выводом сообщения на дисплей ответственного за обслуживание данного АВГК, которое содержит информацию о АВГК и результаты проезда ПУ.
, на дисплей бортового компьютера ПУ должно быть выведено сообщение о выявленном несоответствии. В дополнение к этому, а также на перспективу развития и автоматизации системы контроля АВГК информацию о выявленном несоответствии рекомендуется передавать на сервер АВГК с последующим выводом сообщения на дисплей ответственного за обслуживание данного АВГК, которое содержит информацию о АВГК и результаты проезда ПУ.5.5.6 Оценка погрешности АВГК при измерении осевой нагрузки от инструментальной оси ПУ
5.5.6.1 Данные измерений осевой нагрузки инструментальной оси ПУ, полученные с бортового компьютера ПУ и синхронизированные по времени с результатами измерений АВГК, сравнивают между собой, и вычисляют относительные отклонения измерений по формуле
 , (16)
, (16)где  - значение относительного отклонения результата измерения нагрузки, создаваемой инструментальной осью, полученного от АВГК, от нагрузки инструментальной оси в момент проезда ПУ через комплекс, зафиксированной бортовым компьютером;
- значение относительного отклонения результата измерения нагрузки, создаваемой инструментальной осью, полученного от АВГК, от нагрузки инструментальной оси в момент проезда ПУ через комплекс, зафиксированной бортовым компьютером;
Ii - результат однократного измерения нагрузки от инструментальной оси в движении на АВГК;
Iинс,i - значение нагрузки от инструментальной оси с бортового компьютера в момент проезда через АВГК.
5.5.6.2 Значение  не должно превышать пределы допускаемых погрешностей измерений осевых нагрузок, установленных в эксплуатационной документации АВГК.
не должно превышать пределы допускаемых погрешностей измерений осевых нагрузок, установленных в эксплуатационной документации АВГК.
5.5.6.3 В случае обнаружения расхождений между результатами измерений АВГК и соответствующими данными инструментальных осей на величину, превышающую пределы допускаемых погрешностей, установленных в эксплуатационной документации АВГК  , на дисплей бортового компьютера ПУ должно быть выведено сообщение о выявленном несоответствии. В дополнение к этому информация о выявленном несоответствии передается на сервер АВГК с последующим выводом сообщения, содержащего информацию о АВГК и результатах проезда ПУ, на дисплей ответственного за обслуживание данного АВГК.
, на дисплей бортового компьютера ПУ должно быть выведено сообщение о выявленном несоответствии. В дополнение к этому информация о выявленном несоответствии передается на сервер АВГК с последующим выводом сообщения, содержащего информацию о АВГК и результатах проезда ПУ, на дисплей ответственного за обслуживание данного АВГК.
, на дисплей бортового компьютера ПУ должно быть выведено сообщение о выявленном несоответствии. В дополнение к этому информация о выявленном несоответствии передается на сервер АВГК с последующим выводом сообщения, содержащего информацию о АВГК и результатах проезда ПУ, на дисплей ответственного за обслуживание данного АВГК.5.6 Контроль работоспособности АВГК при измерениях габаритных размеров контрольного транспортного средства
5.6.1 Необходимо определить опорные значения габаритных размеров контрольных ТС, с которыми будут сравниваться результаты измерений АВГК.
5.6.2 На ровном горизонтальном на участке дороги (в зоне взвешивания) располагают ТС. Измерения опорных значений длины, ширины и высоты ТС проводят при помощи рулетки металлической и (или) лазерного дальномера. Погрешность измерений измерительных приборов не должна превышать 1/3 допускаемой погрешности измерений габаритных размеров ТС, установленных в технической документации на АВГК. При определении габаритных размеров не учитываются выступающие детали: антенны, зеркала заднего вида, катафоты, подножки.
5.6.3 Работы по определению опорных значений габаритных размеров ТС могут быть совмещены с работами по определению опорных значений весовых параметров ТС в соответствии с подразделами 5.2 или 5.5.
5.6.4 После фиксации опорных значений габаритных размеров ТС необходимо осуществить проезд контрольного ТС через АВГК с минимальной, максимальной и средней скоростью в рабочем диапазоне скоростей, установленном для данного АВГК, а также с учетом предельного значения скорости, установленного на данном участке дороги. Всего должно быть осуществлено не менее трех проездов для каждой скорости.
Результаты измерений габаритных размеров контрольного ТС заносят в протокол, форма которого приведена в приложении Д.
5.6.5 Погрешность АВГК при измерении каждого габаритного параметра (длина, ширина, высота) ТС в движении определяют по формуле

где Ld,i - измеренное значение габаритного параметра контрольного ТС в движении;
Ls,i - опорное значение габаритного параметра контрольного ТС.
5.6.6 Опорные значения и результаты обработки измерений габаритных параметров контрольного ТС заносят в протокол, форма которого дана в приложении Д.
5.6.7 Значение погрешности измерений габаритных размеров не должно превышать пределы допускаемых погрешностей измерений  , установленных в эксплуатационной документации АВГК.
, установленных в эксплуатационной документации АВГК.
5.7 Контроль работоспособности АВГК при измерениях расстояний между осями контрольного транспортного средства
5.7.1 Необходимо определить опорные значения расстояний между осями контрольных ТС, с которыми будут сравниваться результаты измерений АВГК.
5.7.2 На ровном горизонтальном участке дороги (в зоне взвешивания) располагают ТС. При помощи рулетки (диапазон измерений свыше 0,01 до 10 м) измеряют расстояние между осями контрольного ТС с двух сторон, усредняют и округляют полученный результат с точностью до 0,01 м. Между передней и задней осями контрольного ТС с двух сторон измеряют расстояние, усредняют и округляют полученный результат с точностью до 0,01 м. Полученные значения расстояний между осями используют в качестве опорных значений межосевых расстояний и колесной базы ТС.
5.7.3 Работы по определению опорных значений межосевых расстояний ТС могут быть совмещены с работами по определению опорных значений весовых параметров ТС в соответствии с подразделом 5.2.
5.7.4 Выполняют один проезд ТС через АВГК с минимальной, максимальной и средней скоростью в рабочем диапазоне скоростей, установленном в эксплуатационной документации АВГК. Всего должно быть осуществлено не менее трех проездов для каждой скорости.
Результаты измерений межосевых расстояний контрольного ТС заносят в протокол, форма которого приведена в приложении Е.
5.7.5 Погрешность АВГК при измерении межосевых расстояний ТС в движении определяют по формуле (17).
5.7.6 Опорные значения и результаты обработки измерений межосевых расстояний ТС заносят в протокол, форма которого дана в приложении Е.
5.7.7 Значение погрешности измерений межосевых расстояний не должно превышать пределы допускаемых погрешностей измерений, установленных в эксплуатационной документации АВГК.
5.8.1 Скорость ТС при измерении его весовых и габаритных параметров является влияющей величиной. Значение скорости ТС при измерениях не должно выходить за пределы диапазона рабочих скоростей, установленного для АВГК.
5.8.2 Результаты измерения скорости непосредственно связаны с результатами измерений расстояний между осями ТС, если скорость ТС определяется с помощью измерения интервала времени между проездом осей ТС первой и второй линии весовых датчиков АВГК.
5.8.3 При определении погрешности АВГК измерения скорости ТС необходимо использовать средства измерений утвержденного типа с действительным свидетельством о поверке, пределы погрешности которых не превышают 1/3 пределов погрешности АВГК.
5.8.4 Рекомендуется использовать независимый от АВГК метод, основанный на измерении интервала времени проезда ТС фиксированного по длине расстояния. Одним из возможных способов реализации данного метода может быть использование таймера, к которому подключаются два оптронных датчика.
5.8.5 Оптронный датчик представляет собой излучатель и приемник оптического излучения. Приемник оптронного датчика устанавливается на обочине зоны взвешивания напротив первой (по ходу движения ТС) линии весоизмерительных датчиков АВГК, второй приемник оптронного датчика - на фиксированном расстоянии от первого, например напротив второй линии весоизмерительных датчиков АВГК, но не более 10 м. Напротив оптронных датчиков, перпендикулярно полосе движения, на разделительной полосе размещают излучатели оптронных датчиков.
5.8.6 Расстояние между первым и вторым оптронными датчиками определяется при помощи рулетки измерительной (диапазон измерений свыше 0,01 до 10 м).
5.8.7 При попадании излучения (луча) на приемник оптронного датчика на его выходе формируется высокий уровень логического сигнала. При пересечении ТС линии между излучателем и приемником оптронного датчика на выходе оптронного датчика уровень логического сигнала переключается с высокого на низкий. Изменение логических выходных сигналов оптронных датчиков используют в качестве управляющих сигналов для автоматического запуска и остановки таймера.
5.8.8 При проезде ТС в момент срабатывания первого оптронного датчика запускается таймер. После перемещения ТС на расстояние, равное расстоянию между оптронными датчиками, в момент срабатывания второго оптронного датчика таймер останавливается. Скорость ТС вычисляется как отношение расстояния между оптронными датчиками к интервалу времени, измеренному таймером.
5.8.9 Проезды ТС через АВГК с минимальной, максимальной и средней скоростью осуществляют в рабочем диапазоне скоростей, установленном в эксплуатационной документации АВГК. Всего должно быть осуществлено не менее трех проездов для каждой скорости.
5.8.10 Значение погрешности измерений скорости ТС определяют как разницу между измеренным значением скорости ТС, полученным на АВГК, и значением, полученным при помощи контрольного средства измерений скорости. Полученное значение не должно превышать пределы допускаемых погрешностей измерений скорости, установленных в эксплуатационной документации АВГК. Результаты измерений необходимо занести в протокол, форма которого приведена в приложении Ж.
5.9 Контроль работоспособности и мониторинг метрологических характеристик АВГК на основе проверки линейности зависимости результатов измерений
5.9.1 Общие положения
Метод основан на проверке линейности зависимости электрического сигнала, формируемого весоизмерительными датчиками (пьезоэлектрическими или тензорезистивными), входящими в состав контролируемого АВГК, под воздействием колес ТС, движущегося в рабочем диапазоне скоростей АВГК.
5.9.2 Условия выполнения измерений
5.9.2.1 Условия эксплуатации контролируемого АВГК (требования к месту и технологии установки, подъездным путям, условиям окружающей среды и др.) должны соответствовать требованиям эксплуатационной и технической документации на него.
5.9.2.2 При применении данного метода следует убедиться в том, что тип (категория) и государственный регистрационный знак (ГРЗ) контрольного ТС при каждом его проезде через АВГК идентифицированы верно.
5.9.2.3 При выполнении измерений принимается, что распределение давления по всей площади пятна контакта колеса с опорной поверхностью равномерно.
Условия выполнения измерений:
- скорость движения ТС через АВГК постоянна;
- траектория движения ТС прямолинейна и перпендикулярна линии датчиков АВГК;
- воздействующая на датчик нагрузка от части пятна контакта колеса вертикальна.
5.9.3 Выполнение измерений
5.9.3.1 Для подтверждения линейности характеристик АВГК в эксплуатации необходимо выполнить несколько циклов измерений.
5.9.3.2 Цикл измерений включает не менее 10 результатов измерений осевых нагрузок, массы и расстояний между осями контрольного ТС, проехавшего через АВГК на выбранной скорости в условиях повторяемости. Среди полученных результатов измерений необходимо выявить наличие промахов (результаты измерений, которые отличаются от среднего значения более чем на предел допускаемой относительной погрешности). Допускаемое количество промахов в одном цикле измерений - не более 5%. Обработка результатов измерений выполняется без учета промахов согласно пункту 5.9.4.
5.9.3.3 Скорость проезда контрольного ТС выбирается из разрешенного на данном участке дороги диапазона скоростей, например 20, 40, 60 и 80 км/ч (но не менее трех значений: минимальной, максимальной и средней).
5.9.3.4 В число контрольных следует включать ТС:
- значения осевых нагрузок которых близки к минимальному значению диапазона измерений АВГК;
- со значением осевых нагрузок, близких к среднему и максимальному значению осевых нагрузок ТС, установленных на данном участке дороги.
5.9.3.5 Для достоверности полученных результатов измерений рекомендуется применять несколько типов ТС: двухосные, трехосные, автопоезд в составе двухосного седельного тягача и трехосного полуприцепа.
5.9.4.1 Вычисляют средние значения измеренных параметров (осевых нагрузок, массы и расстояний между осями ТС) по результатам десяти измерений одного и того же ТС с одинаковой скоростью (один цикл измерений) по формуле
 (18)
(18)5.9.4.2 Рассчитывают среднее значение осевой нагрузки транспортного средства  для каждого измеренного параметра в пределах одного цикла измерений. Полученные значения весовых параметров ТС необходимо занести в таблицы 1 - 3, значения расстояний между осями ТС - в таблицу 4.
для каждого измеренного параметра в пределах одного цикла измерений. Полученные значения весовых параметров ТС необходимо занести в таблицы 1 - 3, значения расстояний между осями ТС - в таблицу 4.
Таблица 1
Средние значения осевых нагрузок и массы транспортного
средства со значениями осевых нагрузок, близкими
к минимальному значению диапазона измерений АВГК
Ось транспортного средства | Среднее значение осевой нагрузки транспортного средства, кг, при скорости V, км/ч | |||
V1 (20) | V2 (40) | V3 (60) | V4 (80) | |
1 | ||||
2 | ||||
3 | ||||
... | ||||
n | ||||
Среднее значение массы транспортного средства, кг | ||||
Таблица 2
Средние значения осевых нагрузок и массы транспортного
средства со значениями осевых нагрузок,
близкими к максимальному значению осевых нагрузок,
установленному на данном участке дороги
Ось транспортного средства | Среднее значение осевой нагрузки транспортного средства, кг, при скорости V, км/ч | |||
V1 (20) | V2 (40) | V3 (60) | V4 (80) | |
1 | ||||
2 | ||||
3 | ||||
... | ||||
n | ||||
Среднее значение массы транспортного средства, кг | ||||
Таблица 3
средства со значениями осевых нагрузок, близкими
к среднему значению осевых нагрузок,
установленному на данном участке дороги
Ось транспортного средства | Среднее значение осевой нагрузки транспортного средства, кг, при скорости V, км/ч | |||
V1 (20) | V2 (40) | V3 (60) | V4 (80) | |
1 | ||||
2 | ||||
3 | ||||
... | ||||
n | ||||
Среднее значение массы транспортного средства, кг | ||||
Таблица 4
транспортного средства
Li-(i+1) | Среднее значение расстояния между осями транспортного средства, м, при скорости V, км/ч | |||
V1 (20) | V2 (40) | V3 (60) | V4 (80) | |
L1-2 | ||||
L2-3 | ||||
L3-4 | ||||
L4-5 | ||||
L5-n | ||||
5.9.4.3 На основании полученных данных определяют коэффициенты изменения результатов измерений осевых нагрузок для каждой оси ТС в зависимости от скорости проезда и осевой нагрузки по формуле

где Кn - коэффициент зависимости от изменения скорости для осевой нагрузки ТС;
n - порядковый номер оси ТС;
 (20)
(20) (21)
(21)N - количество результатов измерений.
5.9.4.4 Если значение Кn не выходит за пределы интервала от 0,963 до 1,037 или от 0,967 до 1,033, что соответствует 1/3 пределов допускаемой погрешности АВГК при измерении осевых нагрузок ТС (11% или 10% соответственно), то линейность характеристик не зависит от изменений скорости проезда ТС, а значит и работоспособность АВГК во всем диапазоне измерений осевых нагрузок ТС подтверждается во всем диапазоне рабочих скоростей.
5.9.4.5 На основании полученных данных рассчитывают коэффициенты изменения результатов измерений массы ТС в зависимости от скорости проезда

где КM - коэффициент зависимости от изменения скорости для измерения массы ТС;
 (23)
(23) (24)
(24)5.9.4.6 Если значение КM не выходит за пределы интервала от 0,983 до 1,017, что соответствует 1/3 пределов допускаемой погрешности АВГК при измерении массы ТС, то линейность характеристик не зависит от изменений скорости проезда ТС и работоспособность АВГК при измерениях массы ТС подтверждается во всем диапазоне рабочих скоростей.
5.9.4.7 На основании полученных данных вычисляют коэффициенты изменения результатов измерений расстояний между осями ТС в зависимости от скорости проезда по формуле

где Кn - коэффициент зависимости от изменения скорости для n-й оси ТС;
 ,
,  - среднее значение расстояния между n-й и n + 1 осями ТС, рассчитанное для одного цикла измерений, при движении ТС соответственно с предыдущей Vi и последующей Vj скоростью.
- среднее значение расстояния между n-й и n + 1 осями ТС, рассчитанное для одного цикла измерений, при движении ТС соответственно с предыдущей Vi и последующей Vj скоростью.5.9.4.8 Если значение Кn не выходит за пределы интервала от 0,996 до 1,004, что соответствует 1/30 пределов допускаемой погрешности АВГК при измерении расстояний между осями ТС, то линейность характеристик не зависит от изменений скорости проезда ТС, а значит и работоспособность АВГК при измерениях расстояний между осями ТС подтверждается во всем диапазоне рабочих скоростей.
5.9.4.9 АВГК считается неработоспособным:
- если количество промахов за один цикл измерений более 5%;
Регулировка АВГК (при необходимости) производится методом и средствами, установленными изготовителем АВГК в технической документации.
ФОРМА ПРОТОКОЛОВ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ АВГК.
СЛИЧЕНИЕ С ОПОРНЫМИ ЗНАЧЕНИЯМИ СОГЛАСНО ПОДРАЗДЕЛУ 5.2
Тип АВГК ______________ Заводской N ______________
Расположение __________ Направление движения ____________
Свидетельство о поверке _______________
Тип контрольных весов ____________ Заводской N ___________
Свидетельство о поверке _______________
Таблица А.1
Государственный регистрационный знак | Тип транспортного средства | Число осей | Конфигурация транспортного средства | Система подвески | |||||
Опорные значения весовых параметров ТС, кг | |||||||||
Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Ось n | Масса | |||
Таблица А.2
контрольных транспортных средств
N | Направление заезда на ГПУ | Измеренные значения весовых параметров ТС, кг | ||||||
Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Ось n | Масса | ||
1 | ||||||||
2 | ||||||||
3 | ||||||||
4 | ||||||||
Таблица А.3
N | Относительные отклонения от среднего значения, % | ||||||
Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Ось n | Масса | |
1 | |||||||
2 | |||||||
3 | |||||||
4 | |||||||
5 | |||||||
6 | |||||||
7 | |||||||
8 | |||||||
9 | |||||||
10 | |||||||
 , % , % | |||||||

--------------------------------
Измерения проводил __________________________________
(Ф.И.О., подпись)
Таблица А.4
контрольных транспортных средств
N | ТС (ГРЗ) | Дата, время | Результаты измерений АВГК, кг | Опорные значения весовых параметров ТС, кг | ||||||||||
Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Масса | Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Масса | |||
11 | ||||||||||||||
12 | ||||||||||||||
13 | ||||||||||||||
14 | ||||||||||||||
15 | ||||||||||||||
16 | ||||||||||||||
17 | ||||||||||||||
18 | ||||||||||||||
19 | ||||||||||||||
20 | ||||||||||||||
21 | ||||||||||||||
22 | ||||||||||||||
110 | ||||||||||||||
Измерения проводил __________________________________
(Ф.И.О., подпись)
Таблица А.5
Обработка результатов измерений весовых параметров
контрольных транспортных средств
N | Отклонения осевых нагрузок и погрешности массы ТС | |||||||||||
Абсолютные значения, кг | Относительные от измеренного значения, % | |||||||||||
Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Масса | Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Масса | |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
1 | ||||||||||||
2 | ||||||||||||
3 | ||||||||||||
4 | ||||||||||||
5 | ||||||||||||
6 | ||||||||||||
7 | ||||||||||||
8 | ||||||||||||
9 | ||||||||||||
10 | ||||||||||||
11 | ||||||||||||
12 | ||||||||||||
13 | ||||||||||||
14 | ||||||||||||
15 | ||||||||||||
16 | ||||||||||||
17 | ||||||||||||
18 | ||||||||||||
19 | ||||||||||||
20 | ||||||||||||
Среднее значение  | ||||||||||||
Максимальное значение  , % , % | ||||||||||||
Минимальное значение  , % , % | ||||||||||||
S, % | ||||||||||||
Допускаемая относительная погрешность измерений опорных значений весовых параметров транспортного средства | ||||||||||||
Объем репрезентативной выборки (p = 0,99), k0 = 3,  | ||||||||||||
Соответствие объема выборки условию репрезентативности L > n <*> | ||||||||||||
Границы погрешности с уровнем доверия (p = 0,95), k0 = 2,  | ||||||||||||
Соответствие требованиям к точности измерений <*> | ||||||||||||
--------------------------------
Вывод о работоспособности АВГК при измерениях весовых параметров ТС:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
ФОРМА ПРОТОКОЛОВ ПРОВЕРКИ МЕТРОЛОГИЧЕСКИХ
ХАРАКТЕРИСТИК АВГК. КОНТРОЛЬ РАБОТОСПОСОБНОСТИ И МОНИТОРИНГ
МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АВГК НА ОСНОВЕ СРАВНЕНИЯ
ПОКАЗАНИЙ ДАТЧИКОВ СИЛЫ (ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ)
СОГЛАСНО ПОДРАЗДЕЛУ 5.3
Тип АВГК _____________ Заводской N ______________
Расположение _________ Направление движения ______________
Дата проверки АВГК _______________
Таблица Б.1
и их относительные отклонения
N | ГРЗ | V, км/ч | Номер оси | Результаты измерений осевых нагрузок, кг | Относительные отклонения осевых нагрузок транспортных средств, %  | |||||
1-я линия I1,i | 2-я линия I2,i | 3-я линия I3,i | Среднее значение Ir,i | |||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
1 | 1 | |||||||||
2 | ||||||||||
3 | ||||||||||
4 | ||||||||||
... | ||||||||||
n | ||||||||||
2 | 1 | |||||||||
2 | ||||||||||
3 | ||||||||||
4 | ||||||||||
... | ||||||||||
n | ||||||||||
3 | 1 | |||||||||
2 | ||||||||||
3 | ||||||||||
4 | ||||||||||
... | ||||||||||
n | ||||||||||
n | 1 | |||||||||
2 | ||||||||||
3 | ||||||||||
4 | ||||||||||
... | ||||||||||
n | ||||||||||
Систематическое относительное отклонение измерений осевых нагрузок, %  | ||||||||||
Относительная неопределенность измерений осевых нагрузок, %  | ||||||||||
Относительная неопределенность измерений осевых нагрузок, %  | ||||||||||
Критерий:  <*> <*> | ||||||||||
Расширенная относительная неопределенность измерений осевых нагрузок, %  | ||||||||||
Критерий:  <*> <*> | ||||||||||
--------------------------------
Вывод о работоспособности АВГК при измерениях весовых параметров ТС:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
ХАРАКТЕРИСТИК АВГК. МОНИТОРИНГ РАБОТОСПОСОБНОСТИ
АВГК НА ОСНОВЕ ОЦЕНКИ РАСХОЖДЕНИЙ РЕЗУЛЬТАТОВ
ВЗВЕШИВАНИЯ ОДНИХ И ТЕХ ЖЕ ТРАНСПОРТНЫХ СРЕДСТВ
НА РАЗЛИЧНЫХ АВГК СОГЛАСНО ПОДРАЗДЕЛУ 5.4
Тип АВГК 1 ________________ Заводской N _______________
Расположение ______________ Направление движения ____________
Тип АВГК 2 ________________ Заводской N _______________
Расположение ______________ Направление движения ____________
Тип АВГК 3 ________________ Заводской N _______________
Расположение ______________ Направление движения ____________
Таблица В.1
Результаты измерений весовых параметров транспортных средств
АВГК | ТС (ГРЗ) | V, км/ч | Результаты измерений, кг | Отклонение от среднего значения | ||||||||||
Масса | Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | Масса | Ось 1 | Ось 2 | Ось 3 | Ось 4 | Ось 5 | |||
1 | ||||||||||||||
2 | ||||||||||||||
3 | ||||||||||||||
... | ||||||||||||||
n | ||||||||||||||
1 | ||||||||||||||
2 | ||||||||||||||
3 | ||||||||||||||
... | ||||||||||||||
n | ||||||||||||||
1 | Критерий:  <*> <*> | |||||||||||||
2 | ||||||||||||||
3 | ||||||||||||||
... | ||||||||||||||
n | ||||||||||||||
--------------------------------
Вывод о работоспособности АВГК при измерениях весовых параметров:
АВГК 1 Работоспособен/Не работоспособен ___________________
АВГК 2 Работоспособен/Не работоспособен ___________________
АВГК 3 Работоспособен/Не работоспособен ___________________
...
АВГК n Работоспособен/Не работоспособен ___________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
Таблица В.2
Результаты измерений расстояний между осями ТС
АВГК | ТС (ГРЗ) | V, км/ч | Результаты измерений, см | Отклонение от среднего значения | ||||||||||
База | Ось 1-2 | Ось 2-3 | Ось 3-4 | Ось 4-5 | Ось 5-n | База | Ось 1-2 | Ось 2-3 | Ось 3-4 | Ось 4-5 | Ось 5-n | |||
Критерий работоспособности:  <*> <*> | ||||||||||||||
--------------------------------
Вывод о работоспособности АВГК при измерениях расстояний между осями:
АВГК 1 Работоспособен/Не работоспособен ___________________
АВГК 2 Работоспособен/Не работоспособен ___________________
АВГК 3 Работоспособен/Не работоспособен ___________________
...
АВГК n Работоспособен/Не работоспособен ___________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
Таблица В.3
Результаты измерений габаритных размеров
транспортных средств
АВГК | ТС (ГРЗ) | V, км/ч | Результаты измерений, см | Отклонение от среднего значения | ||||
Длина | Ширина | Высота | Длина | Ширина | Высота | |||
1 | ||||||||
2 | ||||||||
3 | ||||||||
... | ||||||||
n | ||||||||
1 | ||||||||
2 | ||||||||
3 | ||||||||
... | ||||||||
n | ||||||||
1 | Критерий работоспособности:  <*> <*> | |||||||
2 | ||||||||
3 | ||||||||
... | ||||||||
n | ||||||||
--------------------------------
Вывод о работоспособности АВГК при измерениях габаритных параметров:
АВГК 1 Работоспособен/Не работоспособен ___________________
АВГК 2 Работоспособен/Не работоспособен ___________________
АВГК 3 Работоспособен/Не работоспособен ___________________
...
АВГК n Работоспособен/Не работоспособен ___________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
С ИСПОЛЬЗОВАНИЕМ ПЕРЕДВИЖНОГО УСТРОЙСТВА
СОГЛАСНО ПОДРАЗДЕЛУ 5.5
Тип АВГК 1 _______________ Заводской N ________________
Расположение _____________ Направление движения ____________
Таблица Г.1
Протокол проверки работоспособности АВГК
при измерении осевых нагрузок ПУ
Нагрузка на инструментальной оси | Опорные значения осевых нагрузок ПУ, кг | ||||||||||||
Наименование | ГРЗ | Направление проезда | Номер полосы | 1-я ось | 2-я ось | 3-я ось | n-я ось | ||||||
Контрольное ПУ | |||||||||||||
Показатели АВГК | Измеренные значения/Погрешность измерения | ||||||||||||
N | Дата | Номер проезда | V, км/ч | Показания акселерометров, м/с2 | Номер полосы | 1-я ось, кг | 2-я ось, кг | 3-я ось, кг | Ось n, кг | ||||
1 | |||||||||||||
2 | |||||||||||||
3 | |||||||||||||
... | |||||||||||||
n | |||||||||||||
Критерий:  <*> <*> | |||||||||||||
--------------------------------
Вывод о работоспособности АВГК:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
Таблица Г.2
Протокол проверки работоспособности АВГК
при определении массы ПУ
Наименование ТС | ГРЗ | Опорное значение массы ПУ, кг | |||||
Контрольное ПУ | |||||||
Общая информация | Измеренные значения массы/Погрешность измерения | ||||||
N | Дата | Номер проезда | Направление проезда | Номер полосы | Количество осей ПУ | Масса, кг | |
1 | |||||||
2 | |||||||
3 | |||||||
4 | |||||||
... | |||||||
Ni | |||||||
Критерий:  <*> <*> | |||||||
--------------------------------
Вывод о работоспособности АВГК:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
ПРИ ИЗМЕРЕНИЯХ ГАБАРИТНЫХ РАЗМЕРОВ ТРАНСПОРТНЫХ
СРЕДСТВ СОГЛАСНО ПОДРАЗДЕЛУ 5.6
Тип АВГК ______________ Заводской N ____________
Расположение __________ Направление движения __________
Таблица Д.1
Габаритные размеры транспортных средств
N | ТС (ГРЗ) | Дата, время | Опорные значения, см | Измеренные значения, см | Погрешность | ||||||
Длина | Ширина | Высота | Длина | Ширина | Высота | Длина | Ширина | Высота | |||
1 | |||||||||||
2 | |||||||||||
3 | |||||||||||
... | |||||||||||
n | |||||||||||
Критерий:  <*> <*> | |||||||||||
--------------------------------
Вывод о работоспособности АВГК:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
ПРИ ИЗМЕРЕНИЯХ РАССТОЯНИЙ МЕЖДУ ОСЯМИ ТРАНСПОРТНЫХ
СРЕДСТВ СОГЛАСНО ПОДРАЗДЕЛУ 5.7
Тип АВГК ______________ Заводской N ____________
Расположение __________ Направление движения __________
Таблица Е.1
Определение опорных значений расстояний
между осями транспортных средств
Результаты измерений, см | Опорное значение, см | |||||||||
Ось 1-2 | Ось 2-3 | Ось 3-4 | Ось 4-5 | Ось 5-n | Ось 1-2 | Ось 2-3 | Ось 3-4 | Ось 4-5 | Ось 5-n | |
Сторона 1 | ||||||||||
Сторона 2 | ||||||||||
Таблица Е.2
Измеренные значения расстояний между осями
транспортных средств
N | ТС (ГРЗ) | V, км/ч | Результаты измерений, см | Погрешность измерения | ||||||||
Ось 1-2 | Ось 2-3 | Ось 3-4 | Ось 4-5 | Ось 5-n | Ось 1-2 | Ось 2-3 | Ось 3-4 | Ось 4-5 | Ось 5-n | |||
1 | ||||||||||||
2 | ||||||||||||
3 | ||||||||||||
... | ||||||||||||
n | ||||||||||||
Критерий:  <*> <*> | ||||||||||||
--------------------------------
Вывод о работоспособности АВГК:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
ПРИ ИЗМЕРЕНИЯХ СКОРОСТИ КОНТРОЛЬНОГО ТРАНСПОРТНОГО
СРЕДСТВА СОГЛАСНО ПОДРАЗДЕЛУ 5.8
Тип АВГК ______________ Заводской N ____________
Расположение __________ Направление движения __________
Таблица Ж.1
Результаты измерений скорости контрольного
транспортного средства
N | ТС (ГРЗ) | Дата, время | Опорное значение, км/ч | Измеренное значение, км/ч | ||
1 | ||||||
2 | ||||||
3 | ||||||
... | ||||||
n | ||||||
Критерий работоспособности:  <*> <*> | ||||||
--------------------------------
Вывод о работоспособности АВГК:
Работоспособен/Не работоспособен _______________________
Измерения проводил __________________________________
(Ф.И.О., подпись)
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: Постановление Правительства РФ N 272 издано 15.04.2011, а не 15.04.2022. |
Постановление Правительства Российской Федерации от 15 апреля 2022 г. N 272 "Об утверждении Правил перевозки грузов автомобильным транспортом" |