СПРАВКА
Источник публикации
М., 2017
Примечание к документу
Название документа
"Методические рекомендации по разработке и реализации мероприятий по организации дорожного движения. Организация динамической маршрутизации транспортных потоков"
(согласованы Минтрансом России 02.07.2017)
"Методические рекомендации по разработке и реализации мероприятий по организации дорожного движения. Организация динамической маршрутизации транспортных потоков"
(согласованы Минтрансом России 02.07.2017)
Содержание
Заместителем Министра транспорта
Российской Федерации
Н.А.АСАУЛ
2 июля 2017 года
Одобрены
Протоколом Научно-технического совета
открытого акционерного общества
"Научно-исследовательский институт
автомобильного транспорта"
от 25 апреля 2017 г. N 2
Протоколом Секции
"Государственная политика в области
автомобильного и городского
пассажирского транспорта"
Научно-технического совета
Министерства транспорта
Российской Федерации
от 9 декабря 2016 г. N 54
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
ПО РАЗРАБОТКЕ И РЕАЛИЗАЦИИ МЕРОПРИЯТИЙ
ПО ОРГАНИЗАЦИИ ДОРОЖНОГО ДВИЖЕНИЯ
ОРГАНИЗАЦИЯ ДИНАМИЧЕСКОЙ МАРШРУТИЗАЦИИ
ТРАНСПОРТНЫХ ПОТОКОВ
Организация динамической маршрутизации
транспортных потоков.
Методическое руководство
1. Методическое руководство по организации динамической маршрутизации транспортных потоков (далее - Методическое руководство) имеет рекомендательный характер и предназначено для разработки структуры и элементов подсистем интеллектуальных транспортных систем при динамической маршрутизации транспортных потоков муниципальных образований Российской Федерации.
При наличии предложений о доработке настоящего Методического руководства и в случае выявления неточностей просьба направлять информацию в Департамент государственной политики в области автомобильного и городского пассажирского транспорта Министерства транспорта Российской Федерации официальным письмом по адресу: 109992, Москва, ул. Рождественка, д. 1, стр. 1.
2. Настоящее Методическое руководство содержит рекомендации по структуре и элементам подсистем интеллектуальных транспортных систем при динамической маршрутизации транспортных потоков.
3. Методическое руководство содержит рекомендации по использованию современных научно-обоснованных методов организации динамической маршрутизации транспортных потоков в сфере дорожного движения на автомобильных дорогах общего пользования, преимущественно в условиях управления движением автомобильного транспорта по городской улично-дорожной сети без изложения специальных технических требований к периферийному оборудованию, применяемого для перераспределения транспортных потоков.
4. В Методическом руководстве изложены основные условия и возможности применения динамической маршрутизации транспортных потоков на основе сформированных индикаторов эффективности при решении проблем максимального использования пропускной способности улично-дорожной сети на этапе обоснования локального проекта управления дорожным движением при внедрении динамической маршрутизации транспортных потоков.
5. Предлагаемые в Методическом руководстве организационно-технические решения предназначены для повышения уровня обслуживания участников дорожного движения и обеспечения их безопасности при пропуске высокоинтенсивных транспортных потоков в условиях высоких темпов автомобилизации городских территорий и сложившейся улично-дорожной сети.
Основные требования и рекомендации приведены в Приложениях 1 - 8 к настоящему Методическому руководству.
6. Динамическая маршрутизация транспортных потоков, как элемент организации и управления высокоинтенсивным дорожным движением является частью АСУДД и ИТС, реализуется в системах косвенного и динамического управления транспортными потоками с целью перенаправления транспортных потоков с загруженных участков улично-дорожной сети на альтернативные маршруты.
7. Использование динамической маршрутизации транспортных потоков обеспечивает достижение комплексности в управлении дорожным движением путем своевременного информирования его участников об усложнении условий движения и направлено на предотвращение возникновения заторов, снижение продолжительности задержек в движении, обеспечение наиболее равномерного и устойчивого функционирования улично-дорожной сети городов.
8. Определение места, роли и специальных требований для реализации данного метода управления дорожным движением возможно посредством построения физической и функциональной архитектуры проекта динамической маршрутизации транспортных потоков. При этом, применение данного метода обуславливается в определенной степени формированием архитектуры создания ИТС города, функционированием и развитием ее комплексных и инструментальных подсистем, выполнением требований к их эффективному размещению на основе моделирования процессов дорожного движения.
9. Главным условием применения метода динамической маршрутизации транспортных потоков должен выступать не только факт или высокая вероятность возникновения дорожного инцидента, а детектирование процесса ухудшения условий движения, приводящего к образованию затора при отсутствии или неэффективности активного управления. Следующая проблема - определение пороговых состояний транспортных потоков для начала их динамической маршрутизации в зависимости от изменения исходных условий движения на рассматриваемом участке улично-дорожной сети.
10. Достижение целей предотвращения возникновения и снижения продолжительности заторовых ситуаций на маршруте движения автомобильного транспорта, обеспечения устойчивого функционирования различных по транспортной загрузке участков улично-дорожной сети с применением косвенных или динамических методов управления дорожным движением обеспечивается во многом выбором участка детектирования пороговых состояний транспортных потоков.
11. Внедрение динамической маршрутизации транспортных потоков во многом определяется также необходимостью обеспечения устойчивости функционирования тех участков улично-дорожной сети, на которые приходится рекомендуемый альтернативный маршрут. Окончание перенаправления ТП на альтернативный маршрут должно происходить по достижении на нем предельных значений, характеризующих условия дорожного движения, определение которых является критерием ввода данного метода организации дорожного движения.
12. Условием окончания действия динамической маршрутизации является съем характеристик транспортного потока на исходном маршруте, определяющих переход дорожного движения в допускаемое по значениям пропускной способности свободное состояние.
МОДЕЛИРОВАНИЯ ТРАНСПОРТНЫХ ПОТОКОВ (ДМТП)
1. Концептуальная схема основных этапов проведения ДМТП определяется следующим порядком действий (рисунок 1.1):
1) Проверка функционирования комплексных и инструментальных подсистем, периферийного оборудования ДМТП.
2) Создание (изучение при наличии) адекватной модели функционирования УДС в программе моделирования дорожного движения.
3) Для моделирования ДМТП необходимы:
- разработка сценариев прогнозирования распределения ТП на основе адаптации моделей выбора маршрута к реальным условиям;
- внесение в модель условий начала применения ДМТП и его отмены на основе детектирования пороговых состояний ТП.
4) Мониторинг изменения ХТП на участках УДС.
5) Разработка и проведение экспериментов ДМТП на основе детектирования пороговых состояний ТП на исходном маршруте.
6) При детектировании пороговых состояний необходимы:
- определение в программе моделирования дорожного движения альтернативного маршрута с учетом полученных реальных исходных данных;
- проведение экспериментов по ДМТП на альтернативный маршрут по каждому из сценариев прогнозирования распределения ТП в программе моделирования дорожного движения;
- мониторинг изменения ХТП на исходном и альтернативном маршрутах в каждом эксперименте в программе моделирования дорожного движения;
- получение значений эффективности по каждому эксперименту;
- применение КУТП (рекомендация альтернативного маршрута путем вывода информации на ДИТ в режиме реального времени);
- отслеживание периода достижения цели применения ДМТП;
- проведение ДУТП в случае неэффективности КУТП с учетом функциональных возможностей альтернативного маршрута.
7) При достижении цели ДМТП отмена управляющего воздействия.
8) Оценка эффективности и результативности. ДМТП на основе определения сокращением временных затрат, снижения потерь от ДТП, повышения надежности функционирования УДС, снижения эксплуатационных транспортных расходов, сокращения выбросов загрязняющих веществ.

РЕКОМЕНДАЦИИ ПО ОПРЕДЕЛЕНИЮ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ
УЧАСТКОВ УДС ДЛЯ ОРГАНИЗАЦИИ ДИНАМИЧЕСКОЙ МАРШРУТИЗАЦИИ
ТРАНСПОРТНЫХ ПОТОКОВ
ИС МЕГАНОРМ: примечание. Формулы даны в соответствии с официальным текстом документа. |
1. Структура диаграммы фазовых состояний транспортного потока, включающая помимо основных характеристик транспортного потока qmax,  ,
,  , а также значения плотности транспортного потока
, а также значения плотности транспортного потока  , при котором отмечается переход в фазу связанного потока, что приводит при отсутствии ДМТП к образованию предзаторовых ситуаций и затору в ДД (рисунок 2.1).
, при котором отмечается переход в фазу связанного потока, что приводит при отсутствии ДМТП к образованию предзаторовых ситуаций и затору в ДД (рисунок 2.1).

Рисунок 2.1 - Схема определения функциональных возможностей
участков УДС для организации ДМТП
ИС МЕГАНОРМ: примечание. Формулы даны в соответствии с официальным текстом документа. |
2. При этом при определении на альтернативном маршруте состояния транспортного потока, характеризируемое  , то при использовании ДМТП на альтернативный маршрут
, то при использовании ДМТП на альтернативный маршрут 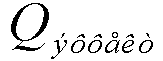 транспортных средств, получим новое состояние транспортного потока, характеризируемое
транспортных средств, получим новое состояние транспортного потока, характеризируемое  и отвечающее свободным условиям движения. Функциональные возможности альтернативного маршрута исчерпываются при достижении
и отвечающее свободным условиям движения. Функциональные возможности альтернативного маршрута исчерпываются при достижении  .
.
, то при использовании ДМТП на альтернативный маршрут транспортных средств, получим новое состояние транспортного потока, характеризируемое и отвечающее свободным условиям движения. Функциональные возможности альтернативного маршрута исчерпываются при достижении .3. Для обеспечения при осуществлении ДМТП необходимой устойчивости функционирования тех участков УДС, на которые приходится рекомендуемый альтернативный маршрут, необходимым условием является получение исходных данных о ДД и состоянии ТП для определения возможности проведения операций по динамической маршрутизации с целью исключения возникновения заторовой ситуации.
4. Определение функциональных возможностей участков УДС для приема дополнительного объема движения следует исходя из значений, приводимых в таблице 2.1, и номограмм состояний ТП, представленных на рисунках 2.2 - 2.5 для различных условий ДД.
Таблица 2.1
Предельные значения ХТП для обеспечения устойчивого
функционирования альтернативного маршрута
Число полос в направлении движения транспортных средств на альтернативном маршруте | Ограничение скорости на участке альтернативного транспортного потока маршрута, км/ч | Предельные значения ХТП для обеспечения устойчивого функционирования альтернативного маршрут a (ki; qi) |
1 | 10 | (90; 840) |
20 | (55; 1080) | |
30 | (40; 1200) | |
40 | (30; 1260) | |
50 | (25; 1260) | |
60 | (20; 1260) | |
70 | (20; 1260) | |
80 | (20; 1260) | |
90 | (20; 1320) | |
2 | 10 | (100; 1680) |
20 | (100; 2040) | |
30 | (60; 2300) | |
40 | (50; 2450) | |
50 | (45; 2450) | |
60 | (40; 2450) | |
70 | (30; 2450) | |
80 | (30; 2450) | |
90 | (30; 2520) | |
3 | 10 | (105; 2460) |
20 | (105; 3100) | |
30 | (90; 3360) | |
40 | (80; 3360) | |
50 | (60; 3360) | |
60 | (50; 3420) | |
70 | (40; 3480) | |
80 | (40; 3480) | |
90 | (40; 3540) | |
4 | 10 | (115; 3180) |
20 | (115; 4020) | |
30 | (90; 4380) | |
40 | (85; 4620) | |
50 | (70; 4620) | |
60 | (60; 4620) | |
70 | (50; 4680) | |
80 | (50; 4680) | |
90 | (50; 4680) |

транспортного потока на дорогах с одной полосой
в направлении движения по маршруту
Рисунок 2.3 - Номограмма определения предельных состояний
транспортного потока на дорогах с одной-двумя полосами
в направлении движения по маршруту

Рисунок 2.4 - Номограмма определения предельных состояний
транспортного потока на дорогах с одной - тремя полосами
в направлении движения по маршруту

транспортного потока на дорогах с одной - четырьмя полосами
в направлении движения по маршруту
РЕКОМЕНДАЦИИ ПО ОПРЕДЕЛЕНИЮ СОСТОЯНИЙ ТРАНСПОРТНЫХ
ПОТОКОВ ДЛЯ ОСУЩЕСТВЛЕНИЯ ИХ ДИНАМИЧЕСКОЙ МАРШРУТИЗАЦИИ
1. Определение состояний транспортных потоков для начала их перенаправления, складывается из нахождения пороговых значений характеристик транспортного потока, при переходе его в фазу синхронизированного потока. Установлено, что на изменение данных пороговых значений источник происхождения заторовой ситуации влияния не оказывает, а основными факторами являются: число полос для движения на рассматриваемых маршрутах, ограничения скоростного режима, интенсивность входящего потока.
2. Метод ДМТП при исходном уровне обслуживания A следует применять только на дорогах с одной полосой в направлении движения по маршруту по достижении условий, представленных на рисунке 3.1.

Рисунок 3.1 - Номограмма определения начала динамической
маршрутизации транспортных потоков в исходных
условиях движения (уровень обслуживания A)
3. Метод динамической маршрутизации транспортных потоков при исходном уровне обслуживания B следует применять только на дорогах с одной и двумя полосами в направлении движения по маршруту по достижении условий, представленных на рисунке 3.2.

Рисунок 3.2 - Номограмма определения начала динамической
маршрутизации транспортных потоков в исходных
условиях движения (уровень обслуживания B)
4. Метод динамической маршрутизации транспортных потоков при исходном уровне обслуживания C следует применять на дорогах с одной, двумя и тремя полосами в направлении движения по маршруту по достижении условий, представленных на рисунке 3.3.

Рисунок 3.3 - Номограмма определения начала динамической
маршрутизации транспортных потоков в исходных
условиях движения (уровень обслуживания C)
5. Метод динамической маршрутизации транспортных потоков при исходном уровне обслуживания D следует применять на дорогах по достижении условий, представленных на рисунках 3.4 - 3.7.

Рисунок 3.4 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах с одной
полосой в направлении движения ТС в исходных условиях
движения (уровень обслуживания D)

Рисунок 3.5 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с двумя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания D)

Рисунок 3.6 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с тремя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания D)

маршрутизации транспортных потоков на маршрутах
с четырьмя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания D)
6. При исходных уровнях обслуживания D, E, F необходимо разделение диаграммы определения пороговой плотности по участкам с числом полос 1, 2, 3, 4.
При исходной интенсивности движения 1200 ед/ч и скорости транспортного потока 60 км/ч в исходных условиях движения уровня обслуживания D применение ДМТП потребуется на участках дорог с одной и двумя полосами в направлении движения транспортных средств по маршруту в момент достижения пороговой плотности транспортного потока от 30 ед/км, в первом случае, и от 40 ед/км - во втором.
На участках дорог с тремя и четырьмя полосами - применение динамической маршрутизации в рассматриваемых исходных условиях не является актуальным.
7. Метод динамической маршрутизации транспортных потоков при исходном уровне обслуживания E следует применять на дорогах по достижении условий, представленных на рисунках 3.8 - 3.11.

Рисунок 3.8 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с одной полосой в направлении движения ТС
в исходных условиях движения (уровень обслуживания E)

Рисунок 3.9 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с двумя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания E)

Рисунок 3.10 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с тремя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания E)

маршрутизации транспортных потоков на маршрутах
с четырьмя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания E)
8. Метод динамической маршрутизации транспортных потоков при исходном уровне обслуживания F следует применять на дорогах по достижении условий, представленных на рисунках 3.12 - 3.15.

Рисунок 3.12 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с одной полосой в направлении движения ТС
в исходных условиях движения (уровень обслуживания F)

Рисунок 3.13 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с двумя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания F)

Рисунок 3.14 - Номограмма определения начала динамической
маршрутизации транспортных потоков на маршрутах
с тремя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания F)

маршрутизации транспортных потоков на маршрутах
с четырьмя полосами в направлении движения ТС
в исходных условиях движения (уровень обслуживания F)
9. Для достижения комплексной цели ДМТП при КУТП с акцентом на предотвращение возникновения заторовой ситуации на исходном маршруте следует фиксировать пороговые состояния плотности ТП (с учетом значений, приводимых в таблицах А.1 - А.15 справочного Приложения А к настоящему Методическому руководству) на ближайших к дорожному инциденту ДТ, расположенных на расстоянии друг от друга не более 500 м в населенных пунктах и 800 - 1500 м вне населенных пунктов (рисунок 3.16).

пороговых состояний ТП для предотвращения возникновения
заторовой ситуации на исходном маршруте
10. Для достижения комплексной цели ДМТП при КУТП с акцентом на снижение продолжительности заторовой ситуации на исходном маршруте следует фиксировать пороговые состояния плотности ТП из таблиц А.1 - А.15 на ДТ, расположенных на расстоянии друг от друга не более 1000 м в населенных пунктах и 1600 - 3000 м вне населенных пунктов (рисунок 3.16).
11. Для достижения комплексной цели ДМТП ДУТП следует применять при фиксировании пороговых состояний плотности ТП (таблицы А.1 - А.15) на ДТ, находящемся на минимальном расстоянии после пересечения (примыкания), являющегося участком смены маршрута (рисунок 3.16).
12. При достижении комплексной цели ДМТП отменять КУТП либо ДУТП следует при фиксировании ХТП, определяющих переход ТП в свободное состояние, на ближайших к дорожному инциденту ДТ. Оценочным показателем рекомендуется выбрать уровень обслуживания C для дорог вне населенных пунктов, уровень обслуживания D - для скоростных, магистральных дорог и улиц в населенных пунктах.
ОСОБЕННОСТИ ЗАДАЧ МОДЕЛИРОВАНИЯ ПРИ ОРГАНИЗАЦИИ ДМТП
1. Моделирование дорожного движения должно являться основополагающей частью работ по организации динамической маршрутизации транспортных потоков и оценки условий функционирования рассматриваемых участков УДС.
2. Общая вычислительная схема моделирования динамического распределения потоков состоит из двух компонентов:
- алгоритм выбора маршрута движения, определяющий распределение ТП по возможным маршрутам в сети в зависимости от времени поездки применительно к каждому шагу при моделировании;
- алгоритм загрузки сети, определяющий распределение ТП по сети.
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
2. Ключевым является алгоритм выбора маршрута: от динамического распределения потоков с переходом к допущениям, основанным на поведении водителей при выборе маршрута, требующий адаптации моделей выбора маршрута к реальным условиям.
3. Программы создания модели функционирования УДС должны соответствовать требованиям п. 9.5 ОДМ 218.9.011-2016 "Рекомендации по выполнению обоснования интеллектуальных транспортных систем".
4. Рекомендуется к применению программное обеспечение по моделированию движения для решения следующих задач:
- для прогнозирования условий функционирования улично-дорожной сети при динамической маршрутизации транспортных потоков (PARAMICS, AIMSUN, FREFLO, PTV Vissim);
- для прогнозирования возникновения заторовых ситуаций и оценки эффективности динамической маршрутизации транспортных потоков (DRACULA, SMARTPATH);
- для изучения влияния транспортных информационных систем на распределение транспортных потоков на улично-дорожной сети с возможностью калибровки моделей поведения водителя (FASTCARS, DYNASMART).
5. Для адаптации стандартных алгоритмов перераспределения транспортных потоков, заложенных в программах моделирования дорожного движения, следует исходить из необходимости определения решаемых задач:
- прогнозирование распределения ТП при ДМТП в оперативном режиме управления;
- прогнозирование распределения ТП при ДМТП в ситуационном режиме управления;
- прогнозирование распределения ТП при ДМТП с учетом перспективы развития УДС.
6. Исходные данные, необходимые для создания модели функционирования УДС, должны соответствовать требованиям п. 9.4 ОДМ 218.9.011-2016 "Рекомендации по выполнению обоснования интеллектуальных транспортных систем". Перечень исходных данных зависит от целей и задач моделирования, объекта моделирования, применяемых моделей и программного обеспечения.
7. В общем случае типы исходных данных можно представить следующим образом:
- геометрические характеристики узла (длина линейных участков, число полос, ширина полос, радиус кривых, продольный уклон, дислокация остановочных пунктов общественного транспорта и пешеходных переходов);
- организация дорожного движения (размещение светофорных объектов, параметры светофорного регулирования, алгоритмы регулирования, дорожные знаки, участки ограничения скорости);
- транспортный спрос (интенсивность движения на входах в зону моделирования, матрицы корреспонденций, состав потока, интенсивность движения общественного транспорта);
- данные для калибровки (интенсивность движения в контрольных точках, скорость, длина очереди). В зависимости от типа применяемых методов моделирования при калибровке модели могут также использоваться параметры ТП, отражающие некоторые свойства автомобиля и водителя (длина автомобиля, максимальное ускорение и замедление, максимальная скорость, время реакции водителя и т.д.).
8. Для создания, калибровки, выбора методов оценки достоверности модели функционирования УДС конкретного проекта следует обратиться к документации выбранного программного обеспечения, поскольку каждое программное обеспечение по моделированию дорожного движения имеет свою собственную уникальную методологию.
9. Обязательными этапами моделирования ДМТП являются:
- определение условий движения на исходном и альтернативном маршрутах с целью повышения уровня обслуживания на исходном маршруте за счет допустимого его снижения на альтернативном маршруте путем постоянного детектирования характеристик ТП на участках рассматриваемой УДС;
- внесение в модель условий начала применения ДМТП и его отмену на основе детектирования пороговых состояний ТП;
- определение альтернативного маршрута на основе алгоритмов выбора водителями маршрутов движения, назначения и адаптации модели выбора маршрута к реальным условиям ДД и возможным программам его моделирования, с назначением цикла перерасчета альтернативных маршрутов, "веса" участка УДС, влияющего на "стоимость его прохождения", количества наборов альтернативных маршрутов, количества альтернативных маршрутов в наборе, а также добавления собственной функции расчета стоимости к основной, заложенной в программе.
ИС МЕГАНОРМ: примечание. Текст дан в соответствии с официальным текстом документа. |
10. Для адаптации моделей выбора маршрута, заложенных в программах моделирования дорожного движения, к сценариям развития дорожной ситуации необходимо определить их параметры в с учетом значений, приведенных в таблице 4.1.
Таблица 4.1
Параметры частных моделей выбора маршрута
для их адаптации к реальным условиям
Моделируемые сценарии | Используемая модель выбора маршрута | Рекомендуемые параметры модели |
1. Водитель выберет альтернативный маршрут | Пропорциональная модель |  |
Logit модель |  | |
C-Logit модель |  ; ; | |
2. Водитель, вероятно, не выберет альтернативный маршрут | Пропорциональная модель |  |
Logit модель |  | |
C-Logit модель |  , ,  | |
3. Водитель, вероятно, выберет альтернативный маршрут | Пропорциональная модель |  |
Logit модель |  | |
C-Logit модель |  , ,  |
ПРИМЕНЕНИЕ ДИНАМИЧЕСКИХ ТАБЛО ПРИ РЕАЛИЗАЦИИ ДМТП
1. Для организации динамической маршрутизации транспортных потоков должны быть использованы исполнительные элементы комплексной подсистемы ДМТП, исходя из необходимости получения данных о дорожном движении.
2. Содержание и структура сообщений для участников движения о возможности (необходимости) выбора альтернативного маршрута должны соответствовать ГОСТ Р 56351-2015 "Интеллектуальные транспортные системы. Косвенное управление транспортными потоками".
3. Требования к технологии информирования участников дорожного движения посредством ДИТ, должны содержать следующие объемы информации для принятия УДД необходимости использования рекомендуемых маршрутов движения:
- информацию о наименовании объекта притяжения транспортного потока и расстоянии до него;
- об исходном и альтернативном маршрутах следования к объекту притяжения транспортного потока;
- о сокращении времени поездки и задержек при передвижении по альтернативному маршруту;
- о текущей ситуации на маршруте с указанием вида дорожного инцидента.
Переменные (динамические) технические средства регулирования дорожного движения могут содержать пиктограммы и схемы с максимальным количеством цветов не более трех.
Количество информационных строк на экранах переменных (динамических) технических средств регулирования дорожного движения должны составлять не более двух при максимально допустимой скорости движения более 60 км/ч и не более трех при значениях скорости менее 60 км/ч.
4. Размещение переменных (динамических) технических средств регулирования дорожного движения на УДС городов, должно осуществляться исходя из следующих основных положений:
- предоставляемая УДД информация должна быть доступна для восприятия и однозначности толкования;
- размещение ДИТ должно входить в систему установки ТСОД;
- установка средств отображения динамической информации на участках автомобильных дорог городов с продольным уклоном выше 4% не допускается.
5. При установке средств отображения динамической информации на криволинейных участках необходимо руководствоваться параметрами расстояния видимости в соответствии с таблицами 5.1 - 5.3.
Таблица 5.1
Расстояние видимости переменных (динамических) технических
средств регулирования дорожного движения на автомобильных
дорогах городов
Расстояние видимости, м | Скорость транспортного потока, км/ч | ||||
60 | 70 | 80 | 90 | ||
Расстояние в поперечном сечении от центра знака до глаз водителя, м | 0 - 6 | 180 | 200 | 220 | 240 |
6 - 9 | 205 | 225 | 245 | 265 | |
9 - 12 | 230 | 250 | 270 | 290 | |
12 - 15 | 255 | 275 | 295 | - | |
15 - 18 | 280 | 300 | - | - | |
18 - 21 | 305 | - | - | - | |
Таблица 5.2
Расстояние видимости средств отображения динамической
информации, расположенных в 60 см от кромки проезжей части
Радиус кривой участка автомобильной дороги в плане, м | Расстояние от траектории автомобиля до препятствия, м | ||||||
3 | 6 | 15 | 30 | 45 | 60 | 75 | |
75 | 30 | 54 | 94 | 140 | 176 | 207 | 240 |
150 | 45 | 76 | 131 | 192 | 240 | 280 | 316 |
225 | 54 | 94 | 161 | 234 | 289 | 338 | 381 |
300 | 60 | 109 | 185 | 271 | 335 | 390 | 438 |
385 | 70 | 121 | 207 | 301 | 371 | 432 | 487 |
450 | 76 | 134 | 228 | 329 | 408 | 472 | 533 |
550 | 82 | 143 | 243 | 356 | 438 | 509 | 573 |
600 | 88 | 152 | 262 | 381 | 469 | 545 | 612 |
685 | 94 | 161 | 277 | 402 | 496 | 576 | 649 |
750 | 97 | 170 | 292 | 423 | 524 | 609 | 682 |
850 | 103 | 179 | 307 | 445 | 548 | 637 | 716 |
900 | 109 | 188 | 320 | 463 | 573 | 664 | 746 |
1200 | 124 | 216 | 368 | 536 | 661 | 768 | 859 |
1500 | 140 | 240 | 414 | 597 | 737 | 856 | 960 |
2300 | 170 | 295 | 505 | 731 | 905 | 1048 | 1173 |
3000 | 198 | 341 | 585 | 844 | 1042 | 1210 | 1356 |
Таблица 5.3
информации, расположенных в 3 м от кромки проезжей части
Радиус кривой участка автомобильной дороги в плане, м | Расстояние от траектории автомобиля до препятствия, м | ||||||||||
3 | 6 | 15 | 30 | 45 | 60 | 75 | |||||
75 | видимость знака не обеспечена | 30 | 45 | 91 | 137 | 173 | 207 | ||||
150 | 45 | 64 | 124 | 188 | 237 | 280 | |||||
| |||||||||||
225 | 54 | 76 | 155 | 228 | 286 | 33 | |||||
300 | 60 | 88 | 176 | 265 | 329 | 387 | |||||
385 | 70 | 100 | 198 | 295 | 368 | 429 | |||||
450 | 76 | 109 | 216 | 323 | 402 | 469 | |||||
550 | 82 | 115 | 234 | 347 | 432 | 505 | |||||
600 | 88 | 124 | 249 | 371 | 463 | 539 | |||||
685 | 94 | 134 | 265 | 393 | 490 | 573 | |||||
750 | 97 | 140 | 280 | 414 | 518 | 603 | |||||
850 | 103 | 146 | 292 | 435 | 542 | 630 | |||||
900 | 109 | 152 | 304 | 454 | 566 | 658 | |||||
1200 | 124 | 176 | 353 | 524 | 652 | 758 | |||||
1500 | 140 | 198 | 393 | 585 | 728 | 847 | |||||
2300 | 170 | 240 | 481 | 716 | 890 | 1036 | |||||
3000 | 198 | 280 | 557 | 826 | 1027 | 1197 | |||||
6. Расстояния расстановки переменных (динамических) технических средств регулирования дорожного движения на автомобильных дорогах городов определяются в соответствии с таблицами 5.4 - 5.6.
Таблица 5.4
Требования к расстоянию расстановки переменных
(динамических) технических средств регулирования
дорожного движения на автомобильных дорогах городов
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: имеются в виду таблицы 5.5 и 5.6, а не 2.5 и 2.6. |
Расстояния установки средств отображения динамической информации перед первым пересечением (примыканием), м | Расстояния установки средств отображения динамической информации при продольной расстановке, м | Расстояния установки средств отображения динамической информации вместе со стационарными дорожными знаками, м | |||||||||
в населенных пунктах | вне населенных пунктов | в населенных пунктах | вне населенных пунктов | в населенных пунктах | вне населенных пунктов | ||||||
мин. | макс. | мин. | макс. | мин. | макс. | мин. | макс. | мин. | макс. | мин. | макс. |
табл. 2.5 | табл. 2.5 | 1000 | 3000 | 1500 | 5000 | 100 | - | 150 | - | ||
Таблица 5.5
Минимальное расстояние установки средств
отображения динамической информации
Количество полос в одном направлении | Минимальное расстояние установки, м | ||||
расчетная скорость движения, км/ч | |||||
60 | 80 | 100 | 120 | 140 | |
1 | 50 | 50 | 100 | 200 | 300 |
2 | 50 | 100 | 200 | 300 | 450 |
3 | 100 | 150 | 300 | 400 | 550 |
4 | 150 | 250 | 350 | 500 | 650 |
5 и более | 200 | 300 | 450 | 600 | 800 |
Таблица 5.6
отображения динамической информации
Количество полос в одном направлении | Максимальное расстояние установки, м | |
В населенных пунктах | Вне населенных пунктов | |
До 3 | 1000 | 1500 |
3 и более | 1500 | 2000 |
7. Размещение переменных (динамических) технических средств регулирования дорожного движения при их взаимодействии с элементами подсистем ИТС транспортной системы (камеры, детекторы, блок управления) проводится в соответствии со следующими рекомендациями (рисунок 5.1):
- для достижения целей динамической маршрутизации транспортных потоков детекторы транспорта следует располагать на расстоянии не менее 800 - 1500 м вне населенных пунктов и не менее 500 м - в населенных пунктах;
- расстояние между местами установки камеры наблюдения и средства отображения динамической информации определяется по формуле 5.1.
ИС МЕГАНОРМ: примечание. Формула дана в соответствии с официальным текстом документа. |
 (5.1)
(5.1)
технических средств регулирования дорожного движения
по отношению к расположению камеры (детектора) наблюдения
1 - зона покрытия камеры наблюдения; 2 - место
возникновения дорожного инцидента; 3 - камера наблюдения;
4 - средство отображения динамической информации; 5 - зона,
в которой возможно распознавание сообщения на табло;
X - определяемое расстояние между местами установки камеры
и средства отображения динамической информации; x1 - слепая
зона камеры; x2 - предел видимости средства отображения
динамической информации; y1 - дистанция принятия решения;
y2 - дистанция реакции водителя; y3 - тормозной путь
8. Расстояния предельной видимости для верхней установки технических средств и оборудования определяются по формуле 5.2:
 (5.2)
(5.2)где h2 - расстояние по вертикали от глаз водителя до информационного табло, м;
9. Расстояния предельной видимости для боковой установки технических средств и оборудования определяются по формуле 5.3:
 (5.3)
(5.3)где d - расстояние по горизонтали от глаз водителя до информационного табло, м;
10. Дистанции принятия решений определяются по формуле 5.4:
ИС МЕГАНОРМ: примечание. Формулы даны в соответствии с официальным текстом документа. |
 , (5.4)
, (5.4)где  - время принятия решения, с (принимается равным 1,5);
- время принятия решения, с (принимается равным 1,5);
V - скорость транспортного потока, м/с.
11. Дистанции реакции водителя определяются по формуле 5.5:
 , (5.5)
, (5.5)где  - время реакции водителя, с (принимается равным 1);
- время реакции водителя, с (принимается равным 1);
V - скорость транспортного потока, м/с.
12. Расчет тормозного пути проводится по формуле 5.6:
 (5.6)
(5.6)где f - коэффициент сцепления колеса с дорогой;
V - скорость транспортного потока, м/с.
13. Примеры расчетов интервалов установки переменных (динамических) технических средств регулирования дорожного движения и периферийного оборудования представлены в Приложении Б (справочном).
14. Блок управления переменных (динамических) технических средств регулирования дорожного движения может располагаться непосредственно вместе со знаком либо на расстоянии не менее 3 метров от него (при расположении знака вне населенных пунктов, рисунок 5.2).

Рисунок 5.2 - Схемы расположения блоков управления
переменными (динамическими) техническими средствами
15. Размещение переменных (динамических) технических средств регулирования дорожного движения сбоку от проезжей части автомобильных дорог городов проводится в соответствие с таблицей 5.7 и рисунками 5.3 - 5.5.
Таблица 5.7
Требования к размещению переменных (динамических)
технических средств регулирования дорожного движения
сбоку от проезжей части автомобильных дорог
Расстояния установки средств отображения динамической информации сбоку от проезжей части, м | Высота установки средств отображения динамической информации сбоку от проезжей части, м | Расстояния установки средств отображения динамической информации сбоку над проезжей частью, м | |||
в населенных пунктах | вне населенных пунктов | в населенных пунктах | вне населенных пунктов | в населенных пунктах | вне населенных пунктов |
не менее 0,5 | не менее 0,5 | не менее 3,6 | 5 - 6 | 5 - 6 | 5 - 6 |

динамической информации в населенных пунктах
(размеры приведены в миллиметрах)

Рисунок 5.4 - Параметры размещения средств отображения
динамической информации в населенных пунктах
(размеры приведены в миллиметрах)

динамической информации вне населенных пунктов
(размеры приведены в миллиметрах)
16. При размещении (динамических) технических средств регулирования дорожного движения сбоку от проезжей части УДС городов необходимо обеспечить удобство эксплуатации и снижение вероятности повреждения.
17. При размещении (динамических) технических средств регулирования дорожного движения необходимо обеспечить экологическую безопасность окружающей среды и городского пространства.
РЕКОМЕНДАЦИИ ПО СТРУКТУРЕ ФУНКЦИОНАЛЬНОЙ АРХИТЕКТУРЫ АСУ ДД
И ИТС ПРИ РЕАЛИЗАЦИИ ДМТП
1. Общие сведения по структуре функциональной архитектуры АСУ ДД и ИТС.
1.1. Проект АСУ ДД и ИТС при реализации ДМТП должен состоять из нескольких комплексных подсистем, объединенных для достижения комплексной цели (рисунок 6.1).

АСУ ДД и ИТС при реализации ДМТП
1.2. В штатном режиме управления комплексной целью ДМТП является:
- обеспечение безопасности дорожного движения;
- обеспечение номинальной пропускной способности;
- формирование заданного поведения участников дорожного движения и культуры вождения.
1.3. В нештатном режиме управления комплексной целью ДМТП является:
- обеспечение безопасности дорожного движения;
- обеспечение номинальной пропускной способности;
- оптимизация транспортного процесса.
1.4. Основными функциями системы ДМТП в штатном режиме управления являются:
- моно- и мультиобъектное маршрутное ориентирование;
- обеспечение информационного сервиса.
1.5. Основными функциями системы ДМТП в нештатном режиме управления являются:
- моно- и мультиобъектное маршрутное ориентирование;
- обеспечение информационного сервиса;
- мониторинг и контроль индикаторов эффективности, характеризующих достижение комплексных целей;
- принятие решения по управлению в рамках своей комплексной цели.
1.6. ДМТП используется при оперативном управлении для перенаправления ТП на альтернативный маршрут путем ДУТП в условиях запланированного вмешательства в штатную работу системы.
1.7. ДМТП используется при ситуационном управлении для перенаправления ТП на альтернативный маршрут путем КУТП при достижении пороговых состояний ТП в условиях возникновения штатных и нештатных ситуаций:
- нештатные ситуации, вызванные окружающей средой (туман, гололед и т.п.);
- нештатные ситуации, вызванные изменениями улично-дорожной сети: разрушения дорожного покрытия, посторонние объекты на проезжей части (упавшее на проезжую часть дерево), ремонтные и строительные работы, затрагивающие проезжую часть;
- нештатные ситуации, вызванные техническими средствами организации дорожного движения (неработающий светофор, нечитаемый дорожный знак и пр.);
- нештатные ситуации, вызванные транспортным потоком (дорожно-транспортные происшествия, затор).
1.8. ДМТП используется при ситуационном управлении для перенаправления ТП на альтернативный маршрут путем ДУТП при неэффективности КУТП.
2. Функции подсистем АСУ ДД и ИТС при реализации ДМТП.
2.1. Структура подсистем АСУ ДД и ИТС при реализации ДМТП должна быть выстроена по иерархическому принципу в соответствии с физической архитектурой ИТС, согласно ГОСТ Р 56294-2014 "Интеллектуальные транспортные системы. Требования к функциональной и физической архитектуре интеллектуальных транспортных систем" (рисунок 6.2).

АСУ ДД и ИТС при ДМТП
2.2. Интеграционная платформа системы ДМТП должна выполнять следующие функции:
- предоставление предварительно обработанных данных от комплексных подсистем ИТС персоналу ЛП ИТС;
- предоставление вариантов принятия решения персоналу ЛП ИТС в штатных и нештатных режимах;
- принятие решений из существующего набора сценариев по управлению транспортной системой в штатном режиме;
- координация работы всех комплексных подсистем ИТС.
2.3. Интеграционная платформа системы ДМТП должна обеспечивать решение следующих задач:
- сбор и хранение данных от всех подсистем ИТС;
- агрегирование и обработка текущих и ретроспективных данных;
- визуализация текущего состояния транспортной системы;
- представление данных в установленной отчетной форме;
- определение режима функционирования транспортной системы;
- корректировка работы подсистем ИТС;
- управление транспортной системой с целью максимизации индикаторов эффективности ЛП ИТС.
2.4. Комплексная подсистема ДМТП должна обеспечивать решение общих задач, выполнение которых позволяет достичь комплексной цели в рамках стратегии управления и принятия решений в сфере оказания транспортных услуг.
2.5. Комплексная подсистема ДМТП при КУТП формируется путем объединения инструментальных подсистем с целью оптимизации индикаторов эффективности данных систем:
- подсистема мониторинга параметров транспортного потока;
- подсистема метеомониторинга;
- подсистема информирования УДД с помощью ДИТ и ЗПИ;
- подсистема видеонаблюдения, детектирования ДТП и ЧС;
- подсистема мониторинга экологических параметров;
- подсистема обеспечения приоритета движения ТС.
2.6. Комплексная подсистема ДМТП при ДУТП формируется путем объединения инструментальных подсистем с целью оптимизации индикаторов эффективности данных систем:
- подсистема мониторинга параметров транспортного потока;
- подсистема метеомониторинга;
- подсистема информирования УДД с помощью ДИТ и ЗПИ;
- подсистема видеонаблюдения, детектирования ДТП и ЧС;
- подсистема мониторинга экологических параметров;
- подсистема обеспечения приоритета движения ТС;
- подсистема светофорного управления;
- подсистема весогабаритного контроля транспортных средств;
- подсистема управления выездом на автомагистраль;
- подсистема пополосного управления.
2.7. В штатных ситуациях аппаратно-программное обеспечение комплексной подсистемы должно работать в автоматическом или автоматизированном режимах. В нештатных ситуациях аппаратно-программное обеспечение комплексной подсистемы должно функционировать как система помощи в принятии решения персоналом системы.
2.8. Исполнительными элементами комплексной подсистемы ДМТП являются инструментальные подсистемы, обеспечивающие реализацию основных функций комплексных подсистем:
- детекторы транспортных потоков;
- пункты детекции скоростных режимов;
- дорожные светофорные контроллеры;
- телекамеры стационарные;
- телекамеры поворотные;
- автоматические дорожные метеостанции;
- тревожная кнопка;
- ДИТ, ЗПИ;
- подсистема оценочного весового контроля;
- комплекс определения негабаритных средств;
- блок распознавания инцидентов и нарушений ПДД;
- подсистема мониторинга парковочных мест;
- аппаратно-программные комплексы;
- связь и передача данных.
МОТИВАЦИОННОЕ УПРАВЛЕНИЕ ВЫЕЗДОМ ТС НА ДОРОГИ С ИНТЕНСИВНЫМ
ДВИЖЕНИЕМ ТРАНСПОРТА В УСЛОВИЯХ ФУНКЦИОНИРОВАНИЯ ОБЪЕКТОВ
ТРАНСПОРТНОГО ПРИТЯЖЕНИЯ БОЛЬШОЙ ЕМКОСТИ (ГИПЕР-
И СУПЕРМАРКЕТЫ, СПОРТИВНЫЕ И ИНЫЕ СООРУЖЕНИЯ)
1.1. В целях предупреждения снижения пропускной способности автомобильных дорог в зонах интенсивного выезда ТС пользователей объектами транспортного притяжения (ОТП) достаточно большой емкости, особенно в часы "пик", составляющих не менее 7 часов в сутки (преимущественно с 7.00 до 10.00 утром и с 16.00 до 20.00 вечером), возникает необходимость внедрения мотивационного выезда на магистральную сеть дорог с ОТП.
1.2. Для достижения указанной цели используется принцип сочетания директивного и косвенного управления, принципиально сочетающих систему воздействия на УДД дополнительной информации, обладающей конкретным значением потребности в ней в режиме "online". Внедрение такого метода обеспечивает условия широкого использования системы динамической маршрутизации транспортных потоков.
1.3. Управление движением на примыкании осуществляется специализированной подсистемой, которую рекомендуется организовывать в интересах и в структуре автоматизированной системы управления дорожным движением в целях обеспечения координированного управления общегородским или магистральным транспортным комплексом.
1.4. Под мотивационным управлением понимается предоставление УДД информации, побуждающей их к определенному действию, результатом которого является пространственное или временное перенаправления транспортных потоков с учетом представленной классификацией в таблице 7.1.
Таблица 7.1
Классификация методов транспортного управления
Описание способа | Технические средства регулирования | Типовой фрагмент УДС | |
1 | Директивное управление | ||
1.1 | Попеременное движение конфликтующих транспортных потоков | Транспортные светофоры, дополнительные средства дорожной информации, в т.ч. рекомендуемые значения скорости движения | Пересечения УДС, перегоны городских улиц |
1.2 | Ограничение скорости движения транспортного потока | УДЗ, информационные табло | Автомобильные дороги и улицы |
2 | Мотивационное управление | ||
2.1 | Регулирование выезда на основе предоставления актуальной информации | Информационное обеспечение УДД в режиме "online", светофорное оборудование | Автомобильные дороги и улица с интенсивным движением |
1.5. Максимальная нагрузка выезда из ОТП определяется исходя из геометрии области слияния ТП на выезде и на основной магистрали с учетом значений, приводимых в таблице 7.2.
Таблица 7.2
Расчетные параметры транспортного потока, исходящего из ОТП
N | Типовая область слияния | Нагрузка выезда из ОТП, | Интенсивность движения выезда из ОТП, |
1 | Однополосный въезд на магистраль без переходно-скоростной полосы | 13 ... 15 | 780 ... 900 |
2 | Однополосный въезд на магистраль с переходно-скоростной полосой | 24 ... 28 | 1440 ... 1680 |
3 | Двухполосный въезд на магистраль с однополосной переходно-скоростной полосой | 30 ... 33 | 1800 ... 1980 |
1.6. Мотивационное информирование УДД-посетителей крупного ОТП рекомендуется обеспечивать при выполнении любого из следующих условий функционирования конкретного ОТП:
- расчетное значение максимальной интенсивности выезда из ОТП -  составляет величину больше практической пропускной способности одной полосы магистральной дороги:
составляет величину больше практической пропускной способности одной полосы магистральной дороги:

- коэффициент отношения расчетного значения максимальной интенсивности выезда из ОТП  к максимальной фактической интенсивности дорожного движения основной магистрали
к максимальной фактической интенсивности дорожного движения основной магистрали  составляет величину более 1/3:
составляет величину более 1/3:

1.7. Система мотивационного информирования УДД-посетителей ОТП формируется как элемент динамической маршрутизации транспортных потоков в целях предупреждения снижения пропускной способности автодороги в зоне действия ОТП (400 м до съезда и 600 м после съезда) и как составная часть ИТС может относиться (а в дальнейшем входить в качестве обязательного условия) к сервисным доменам "Информирование УДД" и "Управление дорожным движением" и объединяет дотранспортное информирование и управление дорожным движением (рисунки 7.1, 7.2).
1.8. Система МИП предназначена для информирования УДД:
- о времени комфортного выезда из ОТП (мотивационное информирование УДД);
- месте комфортного ожидания в ОТП и времени комфортного выезда (маркетинговая реклама).


1.9. Первичная автоматическая идентификация УДД модулем локального позиционирования определяет факт приезда УДД в ОТП, о чем передается сообщение в модуль управления. Для подачи запроса на осуществление выезда из ОТП, УДД достаточно за настраиваемый промежуток времени вторично пересечь порог идентификации, либо любым другим способом сообщить свой номер пользователя, который затем преобразуется модулем локального позиционирования и посредством модуля управления передается оператору мобильного маркетинга. Дополнительно модуль управления, на основании информационного обмена с ЦУДД или ВИС ИТС, сообщает время комфортного выезда. По идентификатору пользователя, оператор мобильного маркетинга, вследствие накопленной статистики по посетителю ОТП, предоставляет адресную рассылку, содержащую время комфортного выезда (полученное от модуля управления) и место комфортного ожидания.
1.10. Информирование УДД может осуществляться в автоматическом режиме адресными комбинированными SMS-сообщениями, используя в качестве средства оповещения мобильный телефон. При использовании посетителем ОТП только стандартной бонусной карты или при отсутствии персонального идентификатора обеспечивается возможность визуального информирования посредством справочного или POS-терминала.
2. Алгоритм работы модуля управления подсистемы МИП.
2.1. Типовой фрагмент УДС придорожного ОТП при использовании технологии МИП может быть представлен следующим образом (рисунок 7.3).

Рисунок 7.3 - Модель фрагмента УДС с примыканием
к ОТП - четыре узла (2-х исходных - сечение I, сечение V;
1-го конечного - сечение IV; области слияния - сечения
II - III; три сегмента (сегмент 1 + сегмент 2 - основная
магистраль; сегмент 3 - примыкание от ОТП)
2.2. При этом модуль управления с точки зрения физической и коммуникационной инфраструктуры представляет собой сервер и базу данных, соединенные по стандартным каналам связи с остальными модулями подсистемы МИП и ЦОДД, АСУДД.
2.3. Модуль управления подсистемы МИП, основываясь на результатах получаемой информации о ДД, обеспечивает выполнение следующих операций:
1) прогнозирование изменения интенсивности транспортного потока на основной магистрали до примыкания из ОТП -  .
.
2) расчет изменения интенсивности транспортного потока на основной магистрали после примыкания из ОТП -  .
.
3) расчет исходных данных для определения квоты УДД, выезжающих на магистраль из ОТП -  и
и  .
.
4) расчет квоты на допустимое количество посетителей, выезжающих на магистраль в последующий момент времени m, определяемый как среднее время выезда посетителя из ОТП на магистраль -  .
.
5) обработку поступающих от посетителей ОТП запросов на выезд.
2.4. Запуск алгоритма обработки запросов производится при получении очередного запроса  . При этом, с периодичностью dt для каждого будущего момента времени m, модуль управления осуществляет ввод текущего значения квоты на выезд
. При этом, с периодичностью dt для каждого будущего момента времени m, модуль управления осуществляет ввод текущего значения квоты на выезд  , а также значение ранее использованной (в момент времени i - 1) части этой квоты -
, а также значение ранее использованной (в момент времени i - 1) части этой квоты -  . Разница этих значений определяет неиспользованный остаток квоты
. Разница этих значений определяет неиспользованный остаток квоты  .
.
2.5. Техническая обработка очередности заявок на выезд происходит по принципу "первый пришел, первый ушел" - First In, First Out (FIFO). При поступлении очередного запроса  , модуль управления начинает заполнять ближайшее свободное время обслуживания m из неиспользованного остатка квоты
, модуль управления начинает заполнять ближайшее свободное время обслуживания m из неиспользованного остатка квоты  , а в случае ее заполнения, из остатка квоты
, а в случае ее заполнения, из остатка квоты  на следующий период обслуживания m + 1 (рисунок 7.4).
на следующий период обслуживания m + 1 (рисунок 7.4).

Рисунок 7.4 - Алгоритм работы модуля управления
2.6. Посредством модуля мотивационного информирования, в ответ на заявку  , осуществляется передача времени комфортного выезда на магистраль из ОТП. Отправка комбинированного SMS-сообщения, содержащего рекомендуемое время комфортного выезда каждого потенциального УДД-посетителя ОТП осуществляется оператором мобильного маркетинга. В следующей операции происходит увеличение значения использованной квоты
, осуществляется передача времени комфортного выезда на магистраль из ОТП. Отправка комбинированного SMS-сообщения, содержащего рекомендуемое время комфортного выезда каждого потенциального УДД-посетителя ОТП осуществляется оператором мобильного маркетинга. В следующей операции происходит увеличение значения использованной квоты  на величину удовлетворенного запроса
на величину удовлетворенного запроса  и процесс переходит к ожиданию следующего запроса на выезд из ОТП.
и процесс переходит к ожиданию следующего запроса на выезд из ОТП.
2.7. Мотивационное управление целесообразно применять в условиях переходных процессов, связанных с текущим уровнем обслуживания основной магистрали (таблица 7.3).
Таблица 7.3
Условия работы подсистемы МИП
N | Уровень обслуживания магистрали (УО по z) | Состояние подсистемы МИП | Комментарии |
1 | A ... C | Выкл. | Управление выездом не требуется. Свободный поток |
2 | Вкл. | Подсистема МИП функционирует | |
3 | D ... F | Выкл. | Управление выездом с помощью МИП невозможно. Перенасыщенный поток |
4 | Вкл. | Подсистема МИП функционирует | |
5 | C ... A | Выкл. | Управление выездом не требуется. Свободный поток |
2.8. Подсистема МИП не предназначена для снижения суммарной интенсивности транспортного потока второстепенного примыкания. МИП обеспечивает только временное перераспределение выездов УДД из ОТП и согласование моментов этих выездов в соответствии с текущим (и прогнозным) уровнем загрузки основной магистрали.
2.9. Функционирование подсистемы МИП позволит:
- уменьшить общее время функционирования систем директивного управления;
- обеспечить однократный переход текущего управления от системы директивного управления к подсистеме МИП, исключая прерывистый режим работы по управлению ДД на магистральной сети;
- обеспечить повышение эффективности применения косвенных методов управления ДД при динамической маршрутизации транспортных потоков, доведения до УДД необходимой информации в реальном масштабе времени с высокой надежностью адекватности рекомендуемых маршрутов требованиям к уровням обслуживания, качеству ОДД и достижению необходимой БДД.
МАРШРУТИЗАЦИИ ТРАНСПОРТНЫХ ПОТОКОВ
1. На первом этапе обоснования эффективности ДМТП должны быть определены индикаторы введения данного ЛП ИТС:
- Длина участков УДС и их доля в составе УДС, обслуживаемых инструментальными подсистемами ДМТП;
- Длина участков УДС и их доля в составе УДС, обслуживаемых периферийным оборудованием системы ДМТП.
На следующем этапе обоснования ДМТП необходимо определить целевые и функциональные индикаторы эффективности. Согласно ОДМ 218.9.011-2016 "Рекомендации по выполнению обоснования интеллектуальных транспортных систем" максимально полная структура целевых индикаторов ДМТП, представлена ниже:
- обеспечение безопасности дорожного движения;
- обеспечение экологической безопасности;
- повышение грузооборота;
- повышение пассажирооборота;
- повышение финансовой привлекательности проекта ИТС;
- повышение комфорта пользователей.
Целевой индикатор обеспечения безопасности дорожного движения состоит из ряда основных функциональных индикаторов:
- количество ДТП;
- число раненых при ДТП (по уровню тяжести согласно Приказу Министерства здравоохранения и социального развития РФ от 24 апреля 2008 г. N 194н);
- число погибших при ДТП;
- социальный риск;
- транспортный риск;
- суммарный ущерб транспортным средствам;
- суммарный ущерб объектам инфраструктуры;
- суммарный ущерб груза.
Целевой индикатор обеспечения экологической безопасности состоит из ряда основных функциональных индикаторов:
- объем выбросов загрязняющего вещества CO;
- объем выбросов загрязняющего вещества CO2;
- объем выбросов загрязняющего вещества CH;
- объем выбросов загрязняющего вещества NOX;
- объем выбросов частиц при износе шин, тормозных накладок, сцепления;
- уровень шума.
Целевой индикатор повышения грузооборота состоит из ряда основных функциональных индикаторов:
- объем (количество) груза;
- эксплуатационные расходы на перевозку;
- средняя скорость движения ТС.
Целевой индикатор повышения пассажирооборота состоит из ряда основных функциональных индикаторов:
- количество пассажиров;
- эксплуатационные расходы на перевозку;
- средняя скорость движения ТС.
Целевой индикатор повышения финансовой привлекательности проекта ИТС состоит из ряда основных функциональных индикаторов:
- экономический эффект от применения ДМТП;
- затраты на разработку и внедрение ДМТП;
- эксплуатационные расходы ДМТП.
Целевой индикатор повышения комфорта пользователей состоит из ряда основных функциональных индикаторов:
- уровень обслуживания (балл);
- пропускная способность дороги (сети дорог);
- уровень загрузки движением (доля);
- время в пути;
- надежность предоставляемой информации о времени прохождения запланированного участка пути;
- стоимость поездки (эксплуатационные затраты или стоимость проезда в общественном транспорте для различных групп автомобильных дорог);
- протяженность участков дорог, обслуживающих движение в режиме перегрузки;
- увеличение мобильности пользователей (транспортная подвижность);
- нервно-психическое напряжение, утомление пользователей в процессе поездки.
При невозможности определения всех индикаторов эффективности ДМТП необходимо руководствоваться их критическим минимумом, представленным в таблице 8.1.
Таблица 8.1
Прямые и косвенные преимущества и издержки
для оценки эффективности применения
динамической маршрутизации транспортных потоков
Критерии | Преимущества | Затраты |
Прямые | Сокращение временных затрат | Капитальные |
Снижение эксплуатационных транспортных расходов | ||
Косвенные | Сокращение количества и потерь от ДТП | Эксплуатационные/Расходы на техническое обслуживание и ремонт |
Сокращение выбросов загрязняющих веществ | ||
Повышение надежности функционирования УДС |
Примеры определения индикаторов эффективности ДМТП представлены в справочном Приложении В к настоящему Методическому руководству.
НОРМАТИВНЫЕ ДОКУМЕНТЫ, ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ, БИБЛИОГРАФИЯ
9.1. Нормативные документы
В настоящем методическом руководстве использованы следующие нормативные документы:
ГОСТ Р 56829-2015 "Интеллектуальные транспортные системы. Термины и определения",
ГОСТ Р 56294-2014 "Интеллектуальные транспортные системы. Требования к функциональной и физической архитектурам интеллектуальных транспортных систем",
ГОСТ Р ИСО 14813-1-2011 "Интеллектуальные транспортные системы. Схема построения архитектуры интеллектуальных транспортных систем. Часть 1. Сервисные домены в области интеллектуальных транспортных систем, сервисные группы и сервисы",
ГОСТ Р 56351-2015 "Интеллектуальные транспортные системы. Косвенное управление транспортными потоками. Требования к технологии информирования участников дорожного движения посредством динамических информационных табло",
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: нормативный документ упоминается дважды. |
ГОСТ Р 56351-2015 "Интеллектуальные транспортные системы. Косвенное управление транспортными потоками. Требования к технологии информирования участников дорожного движения посредством динамических информационных табло",
ГОСТ Р 55691-2013 ИСО "Системы управления и информации на транспорте. Системы оповещения о дорожных происшествиях (TIWS). Требования к системе",
ОДМ 218.9.011-2016 "Рекомендации по выполнению обоснования интеллектуальных транспортных систем".
9.2. Термины и определения
Дорожное движение (ДД) - совокупность общественных отношений, возникающих в процессе перемещения людей и грузов с помощью транспортных средств или без таковых в пределах дорог.
Дорожный инцидент - событие, произошедшее на дороге, которое создает опасные условия вождения и/или ограничивает поток движения.
Динамическая маршрутизация транспортных потоков (ДМТП) - совокупность процедур по организации альтернативного пути следования транспортных средств при изменении состояния дорожного движения, выполняемых в режиме реального времени.
Пороговая плотность транспортного потока - характеристика транспортного потока, при которой наблюдается изменение его состояний, являющаяся определяющей для начала применения метода динамической маршрутизации транспортных потоков.
Улично-дорожная сеть (УДС) - территория общего пользования, предназначенная для обеспечения движения транспортных средств и пешеходов, обеспечения транспортными и пешеходными связями территорий населенных пунктов. К элементам улично-дорожной сети относятся: улицы, проспекты, переулки, проезды, набережные, площади, тротуары, пешеходные и велосипедные дорожки, искусственные сооружения, элементы обустройства и др.
Директивное управление транспортным потоком (ДУТП) - принцип управления транспортным потоком, предполагающий однозначность принятия решения участниками дорожного движения в соответствии с оказанным управляющим воздействием, подчинение которому регламентируется Правилами дорожного движения.
Комплексная подсистема интеллектуальной транспортной системы (КП ИТС) - совокупность систем транспортной телематики и дополнительных программно-аппаратных комплексов, обладающая целостностью и направленная на достижение комплексной цели в рамках стратегии управления и принятия решений на транспорте.
Примечание - Комплексность характеризуется повышением организации и безопасности дорожного движения, а также улучшением социальной сферы и экономики, связанных с работой и движением автомобильного транспорта.
Инструментальная подсистема интеллектуальной транспортной системы (ИП ИТС) - система транспортной телематики, направленная на решение одной или нескольких задач комплексной подсистемы ИТС.
Косвенное управление транспортными потоками (КУТП) - принцип управления транспортным потоком через управление мотивацией участников дорожного движения посредством предоставления информации.
Примечание - наиболее часто управление мотивацией осуществляется через предоставление информации о вариантах маршрутов и условий движения на них.
Локальный проект интеллектуальной транспортной системы (ЛП ИТС) - проект, предназначенный для управления отдельным узлом или группой взаимосвязанных узлов улично-дорожной сети.
Нештатный режим управления - управление объектом, требующее внесения изменений в штатный режим управления с учетом сложившейся ситуации.
Примечание - под нештатным понимается режим управления, применяемый для ликвидации негативных последствий изменения состояния объекта управления и требующий вмешательства при выборе одного или нескольких сценариев управления.
Подсистема интеллектуальной транспортной системы - часть интеллектуальной транспортной системы, обладающая целостностью и способная функционировать независимо от других частей организации дорожного движения.
Телематическая система, система транспортной телематики - система, осуществляющая сбор, обработку и обмен информацией между различными пользователями и элементами транспортной системы.
Штатный режим управления - управление объектом управления в соответствии с запланированной схемой работы, направленное на реализацию целей организации дорожного движения.
Примечание - под штатным понимается режим управления объектом управления в случае отсутствия конфликтности при выборе одного или нескольких сценариев управленческих решений.
Элемент подсистемы интеллектуальной транспортной системы - неделимый с функциональной точки зрения блок информационного, телематического или аппаратного обеспечения подсистем интеллектуальной транспортной системы, рассматриваемый как единое целое и обладающий системными свойствами.
Интеллектуальная транспортная система (ИТС) - система управления, интегрирующая современные информационные и телематические технологии и предназначенная для автоматизированного поиска и принятия к реализации максимально эффективных сценариев управления транспортно-дорожным комплексом региона, конкретным транспортным средством или группой транспортных средств с целью обеспечения заданной мобильности населения, максимизации показателей использования дорожной сети, повышения безопасности и эффективности транспортного процесса, комфортности для водителей и пользователей транспорта.
Локальный проект (ЛП) - проект, имеющий определенные территориальные границы функционирования организации дорожного движения, в том числе входящий в состав интеллектуальной транспортной системы.
Предварительная физическая архитектура локального проекта интеллектуальной транспортной системы - предварительная модель иерархически организованной совокупности подсистем интеллектуальной транспортной системы и взаимосвязи между ними.
Примечание - служит исходными данными для формирования физической архитектуры интеллектуальной транспортной системы.
Предварительная функциональная архитектура локального проекта интеллектуальной транспортной системы - модель иерархически организованной совокупности функций и задач подсистем интеллектуальной транспортной системы.
Примечание - является исходными данными для формирования функциональной архитектуры интеллектуальной транспортной системы.
9.3. Библиографический список
1. Зырянов В.В. Совершенствование критериев оценки условий движения на городских магистралях: Дис. .... канд. техн. наук: 05.22.10 Москва, 1982 154 с. РГБ ОД, 61:83-5/3421-6
2. Жанказиев С.В. Научные основы и методология формирования интеллектуальных транспортных систем в автомобильно-дорожных комплексах городов и регионов. Дис. .... доктора техн. наук. М., 2012
3. Жанказиев С.В., Тур А.А., Халилев Р.Ф. Интеллектуальные дороги - современный взгляд//"Наука и техника в дорожной отрасли", N 2 - 2010, стр. 1 - 6
4. Косолапов А.В. Качество данных о дорожном движении./Проблемы эксплуатации и обслуживания транспортно-технологических машин: материалы международной научно-технической конференции 11 - 12 апреля 2007 г. Ч. 1. - Тюмень: Тюменский гос. нефтегазовый ун-т, 2007. - 188 с. (С. 176 - 181)
5. Феофилова А.А. Обоснование условий распределения транспортных потоков на улично-дорожной сети городов: диссертация ... кандидата технических наук: 05.22.10/Феофилова Анастасия Александровна; [Место защиты: Волгогр. гос. техн. ун-т]. - Ростов-на-Дону, 2013. - 150 с: ил. РГБ ОД, 61 14-5/1784
6. Михайлов А.Ю. Национальные особенности борьбы с пробками или общие проблемы транспортных систем городов Часть 1/"Социально-экономические проблемы развития и функционирования транспортных систем городов и зон их влияния"/науч. материалы XVI международной (19-ой Екатеринбургской) науч.-практ. конф. - Екатеринбург: Изд-во УрГЭУ. 2010 с. 36 - 46
7. Alexander Paz, Srinivas Peeta. On-line calibration of behavior parameters for behavior-consistent route guidance/Transportation Research Part B 43 (2009) p. 403 - 421
8. Ben-Akiva, M.E. and Lerman, S. (1985) "Discrete Choice Analysis: Theory and Applications to Travel Demand", Cambridge, MA. The MIT Press
9. Guidelines for the Location and Placement of Variable Message Signs//RTA Guidelines: PN028/G, TDT 2005/02b, December 2008, 19 p.
10. Guidelines for the Operation of Variable Message Signs on State Highways//Oregon department of transportation highway division, Traffic management section, Report No. 503-986-3568, June 2008 [Электронный ресурс]// - Режим доступа: ftp://ftp.odot.state.or.us/OTCDC.../ Guidelines_for_VMS_on_State_Highway.pdf - Загл. с экрана. - Яз. англ.
11. Guidelines for Variable Message Sign Control//Document No: D10#43935, Revision: 2, Date amended: 11-Mar-2010 [Электронный ресурс]// - Режим доступа: https://www.mainroads.wa.gov.au - Загл. с экрана. - Яз. англ.
12. Hato, E., Taniguchi, M. and Sugie, Y. (1997). Influence of Traffic Information on Drivers' Route Choice/Proceedings of the 7th World Conference on Transport Research, Hensher D.A., King J. and Oum T.H. (eds.). Oxford: Elseveir, pp 27 - 40
13. Hongli Xu, Jing Zhou, Wei Xu. A decision-making rule for modeling travelers' route choice behavior based on cumulative prospect theory. Transportation Research Part C 19 (2011) p. 218 - 228
14. Intelligent Transportation Systems (ITS) Design Manual//Wisconsin Department. Intelligent Transportation Systems (ITS) of Transportation, December, 2000 [Электронный ресурс]// - Режим доступа: www4.uwm.edu/cuts/itsdm/chap6.pdf - Загл. с экрана. - Яз. англ.
15. ITS equipment placement for safety and mobility//University of Massachusetts Lowell: PN UMAR24-26, June 2015 [Электронный ресурс]// - Режим доступа: http://utc.mit.edu/system/files/UMAR24-26%20FP.pdf - Загл. с экрана. - Яз. англ.
16. Kerner B.S., Introduction to Modern Traffic Flow Theory and Control: The Long Road to Three-Phase Traffic Theory, The Long Road to Three-Phase Traffic Theory, 2009, 265 p.
17. MnDOT ITS Project Management Design Manual//Minnesota Department of Transportation, January 2014 [Электронный ресурс]// - Режим доступа: www.dot.state.mn.us/trafficeng/publ/2014_ITS_Manual.pdf - Загл. с экрана. - Яз. англ.
18. Variable message sign operations manual//Texas Transportation Institute, Report No. FHWA-NJ-2001-10, 2001, 654 p.
19. Yi-Chang Chiu, Nathan Huynh. Location configuration design for Dynamic Message Signs under stochastic incident and ATIS scenarios//Transportation Research Record Part C - 2007 - No 15 - pp 33 - 50
20. Zyryanov Vladimir, Feofilova Anastasia. Evaluation Parameters of Re-routing Strategy. Transport Research Arena (TRA) 2014 Proceedings, 10 p. URL: http://tra2014.traconfere...s/TRA2014_Fpaper_18493.pdf
21. Zyryanov Vladimir, Feofilova Anastasia. Evaluation Parameters of Re-routing Strategy. Traffic Management: DOI: 10.1002/9781119307822.ch14, pp. 203 - 216
22. Zyryanov Vladimir, Feofilova Anastasia. Simulation parameters of re-routing strategy. Proceedings of 22nd ITS World Congress, Bordeaux, France, 5 - 9 October 2015. EU-ITS-2802.
23. Zyryanov Vladimir, Feofilova Anastasia. Simulation re-routing strategies for congestion avoidance. Proceedings of 2014 International Conference on Industrial Electronics and Engineering, Hong Kong, China, ICIEE 2014.
(справочно)
ТАБЛИЦЫ ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЙ ТРАНСПОРТНЫХ ПОТОКОВ
ДЛЯ ОСУЩЕСТВЛЕНИЯ ИХ ДИНАМИЧЕСКОЙ МАРШРУТИЗАЦИИ
Таблица А.1
условиях движения (уровень обслуживания A)
Исходная интенсивность движения, ед/ч | Предел скорости режима, км/ч | Пороговая плотность транспортного потока, ед/ч |
400 - 500 | 10 - 12 | 80 - 90 |
400 - 500 | 12 - 16 | 70 - 80 |
400 - 500 | 16 - 18 | 60 - 70 |
400 - 500 | 18 - 20 | 50 - 60 |
500 - 600 | 10 - 12 | 90 - 100 |
500 - 600 | 12 - 14 | 80 - 90 |
500 - 600 | 14 - 16 | 70 - 80 |
500 - 600 | 16 - 18 | 60 - 70 |
500 - 600 | 18 - 20 | 50 - 60 |
600 - 700 | 10 - 12 | 90 - 100 |
600 - 700 | 12 - 14 | 80 - 90 |
600 - 700 | 14 - 16 | 70 - 80 |
Таблица А.2
Пороговая плотность транспортных потоков при исходных
условиях движения (уровень обслуживания B)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
400 - 420 | 10 - 20 | 80 - 90 |
420 - 900 | 10 - 12 | 80 - 90 |
420 - 435 | 12 - 32 | 70 - 80 |
435 - 900 | 12 - 18 | 70 - 80 |
435 - 480 | 14 - 50 | 60 - 70 |
480 - 900 | 14 - 18 | 60 - 70 |
480 - 510 | 18 - 62 | 50 - 60 |
510 - 900 | 18 - 22 | 50 - 60 |
510 - 560 | 24 - 80 | 40 - 50 |
560 - 900 | 24 - 30 | 40 - 50 |
560 - 600 | 30 - 90 | 30 - 40 |
600 - 900 | 30 - 40 | 30 - 40 |
600 - 680 | 44 - 110 | 20 - 30 |
680 - 900 | 40 - 64 | 20 - 30 |
680 - 900 | 64 - 120 | 10 - 20 |
840 - 900 | 10 - 12 | 90 - 100 |
Таблица А.3
Пороговая плотность транспортных потоков при исходных
условиях движения (уровень обслуживания C)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
400 - 420 | 10 - 20 | 90 - 100 |
420 - 1000 | 10 - 12 | 90 - 100 |
1000 - 1140 | 12 - 18 | 90 - 100 |
1140 - 1160 | 18 - 40 | 90 - 100 |
420 - 450 | 12 - 32 | 80 - 90 |
450 - 1100 | 12 - 18 | 80 - 90 |
1100 - 1140 | 18 - 50 | 80 - 90 |
460 - 480 | 14 - 50 | 70 - 80 |
480 - 1080 | 14 - 18 | 70 - 80 |
1080 - 1120 | 18 - 60 | 70 - 80 |
480 - 520 | 18 - 68 | 60 - 70 |
520 - 1040 | 18 - 24 | 60 - 70 |
1040 - 1100 | 18 - 70 | 60 - 70 |
520 - 560 | 22 - 80 | 50 - 60 |
560 - 1000 | 22 - 28 | 50 - 60 |
1000 - 1060 | 22 - 80 | 50 - 60 |
560 - 600 | 32 - 94 | 40 - 50 |
600 - 1000 | 30 - 40 | 40 - 50 |
1000 - 1060 | 30 - 94 | 40 - 50 |
580 - 600 | 42 - 94 | 30 - 40 |
600 - 1000 | 40 - 60 | 30 - 40 |
1000 - 1040 | 60 - 120 | 30 - 40 |
680 - 1000 | 66 - 120 | 20 - 30 |
Таблица А.4
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с одной полосой
в направлении движения ТС по маршруту
(уровень обслуживания D)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
900 - 1600 | 10 - 14 | 80 - 90 |
900 - 1600 | 14 - 18 | 70 - 80 |
900 - 1600 | 18 - 22 | 60 - 70 |
900 - 1600 | 22 - 28 | 50 - 60 |
900 - 1600 | 28 - 40 | 40 - 50 |
900 - 1600 | 40 - 54 | 30 - 40 |
900 - 1600 | 54 - 120 | 20 - 30 |
Таблица А.5
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с двумя полосами
в направлении движения ТС по маршруту
(уровень обслуживания D)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
900 - 1020 | 10 - 16 | 105 - 110 |
1020 - 1600 | 10 - 12 | 105 - 110 |
940 - 1050 | 18 - 30 | 100 - 105 |
1050 - 1600 | 12 - 18 | 100 - 105 |
960 - 1080 | 30 - 44 | 90 - 100 |
1080 - 1600 | 18 - 20 | 90 - 100 |
1020 - 1120 | 44 - 54 | 80 - 90 |
1120 - 1600 | 20 - 26 | 80 - 90 |
1060 - 1160 | 54 - 70 | 70 - 80 |
1160 - 1600 | 26 - 30 | 70 - 80 |
1120 - 1200 | 70 - 80 | 60 - 70 |
1200 - 1600 | 30 - 40 | 60 - 70 |
1160 - 1220 | 80 - 96 | 50 - 60 |
1220 - 1600 | 50 - 70 | 50 - 60 |
1220 - 1600 | 70 - 120 | 40 - 50 |
Таблица А.6
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с тремя полосами
в направлении движения ТС по маршруту
(уровень обслуживания D)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
1000 - 1600 | 10 - 16 | 105 - 110 |
1160 - 1340 | 14 - 20 | 100 - 105 |
1340 - 1600 | 14 - 80 | 100 - 105 |
1300 - 1600 | 18 - 24 | 90 - 100 |
1440 - 1600 | 24 - 30 | 80 - 90 |
Таблица А.7
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с четырьмя полосами
в направлении движения ТС по маршруту
(уровень обслуживания D)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
900 - 1600 | 10 - 12 | 105 - 110 |
980 - 1200 | 12 - 20 | 100 - 105 |
1200 - 1600 | 12 - 16 | 100 - 105 |
1200 - 1440 | 16 - 24 | 90 - 100 |
1440 - 1600 | 16 - 20 | 90 - 100 |
1440 - 1600 | 20 - 30 | 80 - 90 |
Таблица А.8
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с одной полосой
в направлении движения ТС по маршруту
(уровень обслуживания E)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
1000 - 2400 | 10 - 14 | 80 - 90 |
1000 - 2400 | 14 - 18 | 70 - 80 |
1000 - 2400 | 18 - 22 | 60 - 70 |
1000 - 2400 | 22 - 28 | 50 - 60 |
1000 - 2400 | 28 - 40 | 40 - 50 |
1000 - 2400 | 40 - 50 | 30 - 40 |
1000 - 1600 | 50 - 120 | 20 - 30 |
1600 - 2400 | 60 - 120 | 20 - 30 |
Таблица А.9
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с двумя полосами
в направлении движения ТС по маршруту
(уровень обслуживания E)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
1000 - 2400 | 10 - 12 | 105 - 110 |
1000 - 1050 | 12 - 20 | 100 - 105 |
1050 - 2400 | 12 - 16 | 100 - 105 |
1050 - 1100 | 16 - 40 | 90 - 100 |
1100 - 2400 | 16 - 20 | 90 - 100 |
1100 - 1150 | 20 - 58 | 80 - 90 |
1150 - 2400 | 20 - 24 | 80 - 90 |
1150 - 1200 | 26 - 72 | 70 - 80 |
1200 - 2400 | 26 - 30 | 70 - 80 |
1200 - 1250 | 30 - 86 | 60 - 70 |
1250 - 2400 | 30 - 40 | 60 - 70 |
1220 - 1250 | 40 - 90 | 50 - 60 |
1250 - 2400 | 40 - 50 | 50 - 60 |
1280 - 1300 | 50 - 110 | 40 - 50 |
1300 - 2400 | 50 - 70 | 40 - 50 |
1300 - 2400 | 70 - 120 | 30 - 40 |
Таблица А.10
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с тремя полосами
в направлении движения ТС по маршруту
(уровень обслуживания E)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
1000 - 1300 | 10 - 24 | 105 - 110 |
1300 - 2400 | 10 - 14 | 105 - 110 |
1100 - 1400 | 24 - 38 | 100 - 105 |
1400 - 2400 | 14 - 18 | 100 - 105 |
1200 - 1450 | 38 - 54 | 90 - 100 |
1450 - 2400 | 18 - 24 | 90 - 100 |
1300 - 1500 | 54 - 66 | 80 - 90 |
1500 - 2400 | 24 - 34 | 80 - 90 |
1400 - 1600 | 66 - 82 | 70 - 80 |
1600 - 2400 | 34 - 40 | 70 - 80 |
1500 - 1700 | 82 - 96 | 60 - 70 |
1700 - 2400 | 40 - 50 | 60 - 70 |
1650 - 1800 | 96 - 110 | 50 - 60 |
1800 - 2400 | 50 - 70 | 50 - 60 |
1800 - 2400 | 70 - 120 | 40 - 50 |
Таблица А.11
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с четырьмя полосами
в направлении движения ТС по маршруту
(уровень обслуживания E)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
1000 - 1120 | 10 - 14 | 105 - 110 |
1120 - 2400 | 10 - 12 | 105 - 110 |
1050 - 1300 | 14 - 32 | 100 - 105 |
1300 - 2400 | 12 - 16 | 100 - 105 |
1200 - 1400 | 32 - 50 | 90 - 100 |
1400 - 2400 | 16 - 22 | 90 - 100 |
1350 - 1600 | 50 - 64 | 80 - 90 |
1600 - 2400 | 22 - 40 | 80 - 90 |
1600 - 1700 | 66 - 82 | 70 - 80 |
1700 - 2400 | 44 - 52 | 70 - 80 |
1700 - 2400 | 50 - 80 | 60 - 70 |
1900 - 2400 | 60 - 100 | 50 - 60 |
Таблица А.12
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с одной полосой
в направлении движения ТС по маршруту
(уровень обслуживания F)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
2400 - 4000 | 10 - 14 | 80 - 90 |
2400 - 4000 | 14 - 16 | 70 - 80 |
2400 - 4000 | 18 - 22 | 60 - 70 |
2400 - 4000 | 22 - 28 | 50 - 60 |
2400 - 4000 | 28 - 40 | 40 - 50 |
2400 - 3050 | 40 - 50 | 30 - 40 |
3050 - 4000 | 40 - 60 | 30 - 40 |
2400 - 3050 | 50 - 120 | 20 - 30 |
3050 - 4000 | 60 - 120 | 20 - 30 |
Таблица А.13
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с двумя полосами
в направлении движения ТС по маршруту
(уровень обслуживания F)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
2400 - 4000 | 10 - 12 | 105 - 110 |
2400 - 4000 | 12 - 16 | 100 - 105 |
2400 - 4000 | 16 - 20 | 90 - 100 |
2400 - 4000 | 20 - 26 | 80 - 90 |
2400 - 4000 | 26 - 30 | 70 - 80 |
2400 - 4000 | 30 - 40 | 60 - 70 |
2400 - 4000 | 40 - 50 | 50 - 60 |
2400 - 4000 | 50 - 70 | 40 - 50 |
2400 - 4000 | 70 - 120 | 30 - 40 |
Таблица А.14
Пороговая плотность транспортных потоков при исходных
условиях движения на участках дорог с тремя полосами
в направлении движения ТС по маршруту
(уровень обслуживания F)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
2400 - 4000 | 10 - 14 | 105 - 110 |
2400 - 4000 | 14 - 18 | 100 - 105 |
2400 - 4000 | 18 - 26 | 90 - 100 |
2400 - 4000 | 26 - 32 | 80 - 90 |
2400 - 4000 | 32 - 38 | 70 - 80 |
2400 - 4000 | 38 - 50 | 60 - 70 |
2400 - 4000 | 50 - 70 | 50 - 60 |
2400 - 4000 | 70 - 120 | 40 - 50 |
Таблица А.15
условиях движения на участках дорог с четырьмя полосами
в направлении движения ТС по маршруту
(уровень обслуживания F)
Исходная интенсивность движения, ед/ч | Предел скорости на маршруте, км/ч | Пороговая плотность транспортного потока, ед/ч |
2400 - 4000 | 10 - 11 | 105 - 110 |
2400 - 4000 | 11 - 16 | 100 - 105 |
2400 - 4000 | 16 - 22 | 90 - 100 |
2400 - 2800 | 22 - 34 | 80 - 90 |
2800 - 4000 | 22 - 36 | 80 - 90 |
2400 - 2600 | 34 - 44 | 70 - 80 |
2600 - 4000 | 34 - 56 | 70 - 80 |
2400 - 2600 | 44 - 58 | 60 - 70 |
2600 - 4000 | 50 - 64 | 60 - 70 |
2400 - 2600 | 58 - 66 | 50 - 60 |
2600 - 4000 | 66 - 120 | 50 - 60 |
(справочно)
(ДИНАМИЧЕСКИХ) ТЕХНИЧЕСКИХ СРЕДСТВ РЕГУЛИРОВАНИЯ
ДОРОЖНОГО ДВИЖЕНИЯ И ПЕРИФЕРИЙНОГО ОБОРУДОВАНИЯ
Результаты расчета интервалов установки переменных (динамических) технических средств регулирования дорожного движения при использовании характерных условий:
V = 60 км/ч, 80 км/ч; x1 = 20 м, x2 = 30 м; x'2 = 38 м.
Таблица Б.1
Примеры интервалов установки переменных (динамических)
технических средств регулирования дорожного движения
Параметры установки | Верхняя установка технических средств и оборудования | Боковая установка технических средств и оборудования | ||
V, км/ч | V, км/ч | |||
60 | 80 | 60 | 80 | |
y1, м | 25,0 | 33,3 | 25,0 | 33,3 |
y2, м | 16,7 | 22,2 | 16,7 | 22,2 |
y3, , м | 42,9 | 81,3 | 42,9 | 81,3 |
X, м | 9,6 | 53,5 | 1,6 | 45,5 |
(справочно)
Таблица В.1
Преимущества и издержки применения динамической
маршрутизации транспортных потоков на основе
использования переменных (динамических) технических
средств регулирования дорожного движения <1>
--------------------------------
<1> По данным Guidelines for the Location and Placement of Variable Message Signs//RTA Guidelines: PN028/G, TDT 2005/02b, December 2008, 19 p.
Тип автомобильных перевозок | Прямые преимущества | Косвенные преимущества | Прямые затраты | Косвенные затраты | ||
Сокращение временных затрат | Снижение эксплуатационных транспортных расходов | Снижение потерь от ДТП | Повышение надежности функционирования улично-дорожной сети | Капитальные | Эксплуатационные/Расходы на техническое обслуживание и ремонт | |
Городские и междугородние | - сокращение временных затрат участников движения, оцениваемые в денежном эквиваленте от $1,6 млн. до $3,9 млн. - при значении доли транспортных средств, выбравших альтернативный маршрут, с 3% до 27% время поездки сокращается на 0,2% до 43,6% - 85% респондентов указали, что они изменили свой маршрут. Из этих респондентов, 66% отметили сокращение времени поездки в результате изменения маршрута - увеличение скорости движения транспортного потока на 8 - 13% - влияние на выбор альтернативного маршрута в пределах 68 - 72% - снижение интенсивности дорожного движения в "узких" местах в часы пик на 20 - 40%, в местах проведения массовых мероприятий на 30 - 40% | $4,8 млн. | $5,2 млн. Сокращение числа ДТП на 41% | является одной из 5 важнейших подсистем ИТС для повышения надежности функционирования улично-дорожной сети, особенно в условиях возникновения инцидентов | $47,000 - $119,000 | $2300 - $6000 в год $2400 - $6,000 в год $75,000 - $125,000 за знак |
Сельские | Посредством сокращения расходов топлива на 2600 - 2800 л | Не отмечено, в целом, увеличение скорости транспортного потока и повышение объемов движения транспортных средств | $47,000 - $119,000 | $2300 - $6000 в год | ||
В качестве примера применения ДМТП в России рассмотрена улично-дорожная сеть г. Ростова-на-Дону, осуществляющая функцию подъезда к городу. Выбор места возникновения инцидента обусловлен топографическим анализом ДТП, произошедших в период 2010 - 2012 гг. на рассматриваемом участке Восточного шоссе г. Ростова-на-Дону, выполненным средствами ГИС. Длительность устранения последствий инцидента установлена путем статистического анализа данных о ДТП.
Для изучения эффективности ДМТП с целью снижения продолжительности заторовых ситуаций и, соответственно, сокращения времени эвакуации, предложены следующие стратегии:
Стратегия 0: Без динамической маршрутизации.
Стратегия 1: Осуществляется перенаправление транспортных средств с маршрута 1 на маршрут 2 при условии принятия 33% водителей управленческих воздействий (достаточное).
Стратегия 2: Осуществляется перенаправление транспортных средств с маршрута 1 на маршрут 3 при условии принятия 33% водителей управленческих воздействий (достаточное).
Стратегия 3: Осуществляется перенаправление с маршрута 1 на маршрут 2 и маршрут 3 из-за непринятия водителями управленческих воздействий.
Для проведения качественного анализа стратегий использованы данные полученные в программе AIMSUN с применением прикладного программирования (API), сообщающие скорость автомобиля на каждом из трех маршрутов в каждый назначенный промежуток времени.
Количественный анализ результатов экспериментов показал сокращение времени передвижения транспортных средств при использовании стратегии 1 на исходном маршруте на 200%, при использовании стратегий 2 - 3 на 175%. Из рассмотренных вариантов развития ситуации при возникновении инцидента на исходном маршруте, можно сделать вывод, что применение ДМТП, в целом, имеет высокую эффективность в отношении снижения продолжительности заторовой ситуации.