СПРАВКА
Источник публикации
Документ опубликован не был
Примечание к документу
Текст документа приведен в соответствии с публикацией на сайте https://favt.gov.ru/ по состоянию на 06.08.2025.
Название документа
"Рекомендации по проведению летных проверок средств радиотехнического обеспечения полетов и авиационной электросвязи гражданской авиации"
(введены Письмом Росавиации от 30.05.2025 N Исх-19919/07)
"Рекомендации по проведению летных проверок средств радиотехнического обеспечения полетов и авиационной электросвязи гражданской авиации"
(введены Письмом Росавиации от 30.05.2025 N Исх-19919/07)
Содержание
Письмом Росавиации
от 30 мая 2025 г. N Исх-19919/07
РЕКОМЕНДАЦИИ ПО ПРОВЕДЕНИЮ ЛЕТНЫХ ПРОВЕРОК
СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ
И АВИАЦИОННОЙ ЭЛЕКТРОСВЯЗИ ГРАЖДАНСКОЙ АВИАЦИИ
1. Настоящие рекомендации по проведению летных проверок средств радиотехнического обеспечения полетов и авиационной электросвязи гражданской авиации (далее - Рекомендации) подготовлены для использования руководящим, инженерно-техническим и летным персоналом авиационных предприятий - эксплуатантов воздушных судов-лабораторий (далее - ВСЛ) и организаций, осуществляющих эксплуатацию средств радиотехнического обеспечения полетов и авиационной электросвязи гражданской авиации (далее - РТОП), органов обслуживания воздушного движения, эксплуатантов воздушных судов, привлекаемых к проведению летных проверок средств РТОП.
2. Рекомендации составлены с учетом положений приказа Министерства транспорта Российской Федерации от 07.10.2024 N 354 "Об утверждении Федеральных авиационных правил "Порядок проведения для гражданской авиации наземных и летных проверок светосигнального оборудования, устанавливаемого на сертифицированных аэродромах, предназначенных для взлета, посадки, руления и стоянки гражданских воздушных судов, радиотехнического оборудования и оборудования авиационной электросвязи, используемых для обслуживания воздушного движения, наземного оборудования, необходимого для предоставления поставщиками услуг по обслуживанию линий управления беспилотными авиационными системами и контроля беспилотных авиационных систем", а также документа Doc 8071 "Руководство по испытаниям радионавигационных средств" Международной организации гражданской авиации (ИКАО).
3. Рекомендации содержат перечень параметров средств РТОП, проверяемых при выполнении летных проверок.
4. В таблице результатов измерений параметров и характеристик проверяемой системы или средства наблюдения (приложение к акту летной проверки), указываются средства автоматизации, на которых проверялась обработка и отображение информации наблюдения, а также делается вывод пригодности или непригодности средств автоматизации к применению для ОВД.
5. При подготовке к летной проверке экипаж ВСЛ, диспетчерский состав органа ОВД, инженерно-технический персонал, эксплуатирующий средство РТОП, АС, участвующие в летной проверке, проводят брифинг.
6. При выполнении полета ВСЛ осуществляется обмен информацией между инженером-оператором аппаратуры летного контроля и инженерно-техническим персоналом службы эксплуатации радиотехнического оборудования обеспечения полетов и связи о качестве функционирования проверяемого радиомаяка, проведении необходимых регулировок и т.п.
7. Перечень сокращений, применяемых в приложениях к настоящим рекомендациям:
АВЭС | авиационная воздушная электросвязь |
АЗН-В | система вещательного автоматического зависимого наблюдения |
АРП | автоматический радиопеленгатор |
АРЛК | аэродромный радиолокационный комплекс |
АРМ УВД | автоматизированное рабочее место управления воздушным движением |
АРК | автоматический радиокомпас |
АЛК | аппаратура летного контроля |
АХ | азимутальная характеристика |
БАС | беспилотная авиационная система |
БПРМ | ближний приводной радиомаяк |
БПРС | ближняя приводная радиостанция |
ВСП | вертикальная составляющая поля |
ВПП | взлетно-посадочная полоса |
ВС | воздушное судно |
ВРЛ | вторичный радиолокатор |
ГРМ | глиссадный радиомаяк |
ГНСС | глобальная навигационная спутниковая система |
ДПРМ | дальний приводной радиомаяк |
ДПРС | дальняя приводная радиостанция |
ЗД | зона действия |
ИО АЛК | инженер-оператор аппаратуры летного контроля |
ИП | информационный параметр |
ИТП | инженерно-технический персонал |
КРМ | курсовой радиомаяк |
КСА УВД | комплекс средств автоматизации управления воздушным движением |
КСА НКАД | комплекс средств автоматизации наземного контроля аэродромного движения |
КСА УВН | комплекс средств удаленного видеонаблюдения |
ЛК | линия курса |
ЛП | летная проверка |
ЛККС | локальная конрольная-корректирующая станция |
ЛГ | линия глиссады |
МПСН-Ш | многопозиционная система наблюдения - широкозонная |
МПСН-А | многопозиционная система наблюдения - аэродромная |
МК | магнитный курс |
МРМ | маркерный радиомаяк |
ОРЛ-Т | обзорный радиолокатор-трассовый |
ОРЛ-А | обзорный радиолокатор-аэродромный |
ОСП | оборудование системы посадки |
ОПРС | отдельная приводная радиостанция |
ПРЛ | первичный радиолокатор |
ПРЛ | посадочный радиолокатор |
ПРС | приводная радиостанция |
РМС | радиомаячная система |
РМД | радиомаяк дальномерный |
РМД-НП | радиомаяк дальномерный - навигационно-посадочный |
РМА | радиомаяк азимутальный |
РД | рулежная дорожка |
СССО | система светосигнального оборудования |
СВН | система визуального наблюдения |
САК | система автоматического контроля |
ТС | транспортное средство |
УТЗ | устройство траекторной записи |
ЭРТОС | эксплуатация радиотехнического оборудования и связи |
ЛЕТНАЯ ПРОВЕРКА РАДИОМАЯЧНОЙ СИСТЕМЫ
ИНСТРУМЕНТАЛЬНОГО ЗАХОДА ВОЗДУШНОГО СУДНА НА ПОСАДКУ
1. Общие положения
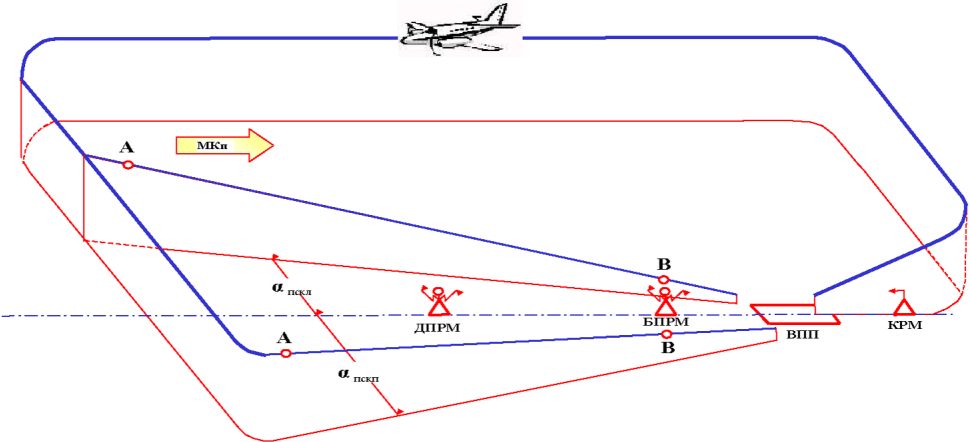
При измерении параметров и характеристик РМС маневрирование ВСЛ осуществляется по стандартной схеме захода на посадку на данном аэродроме.
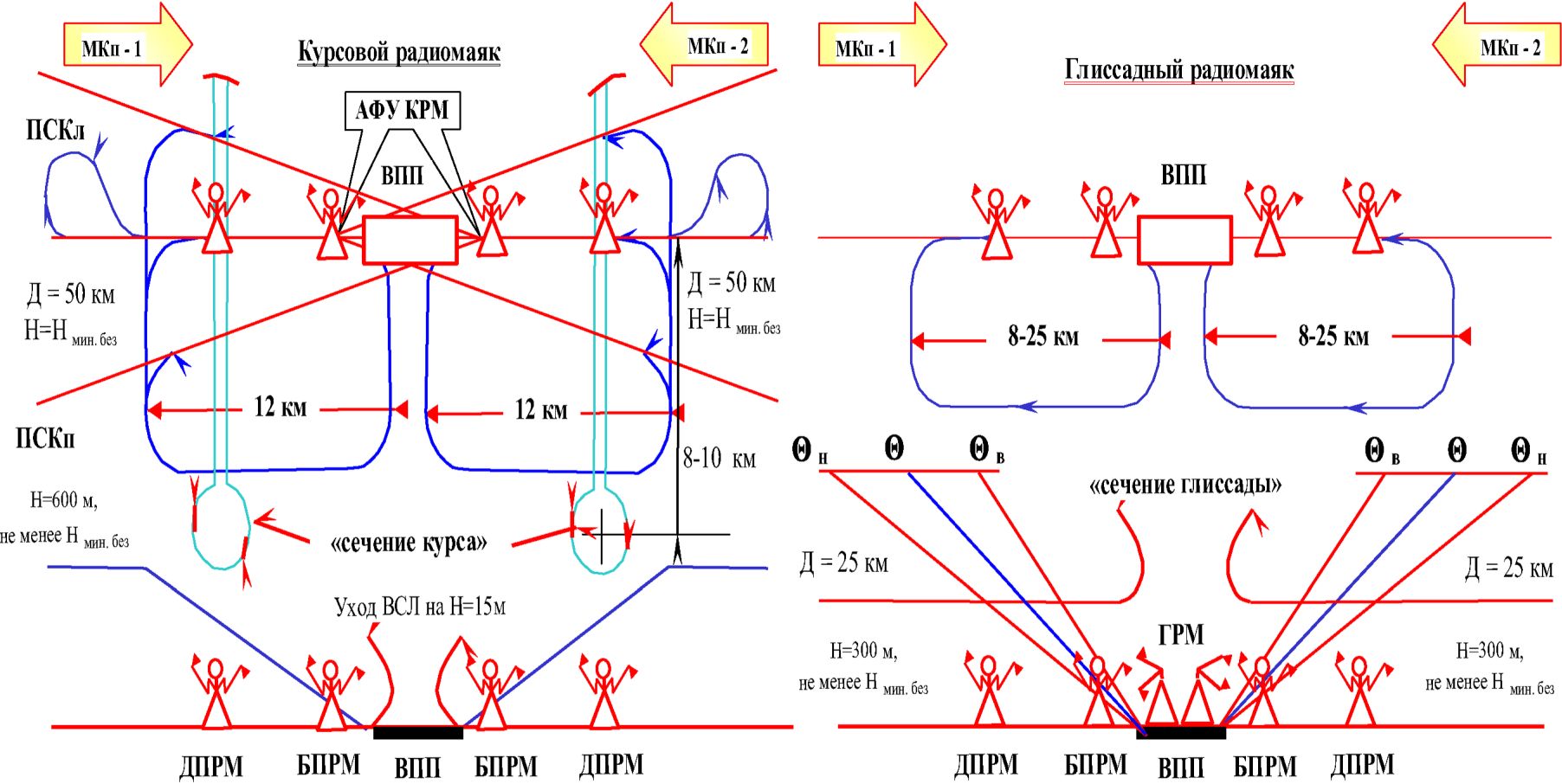
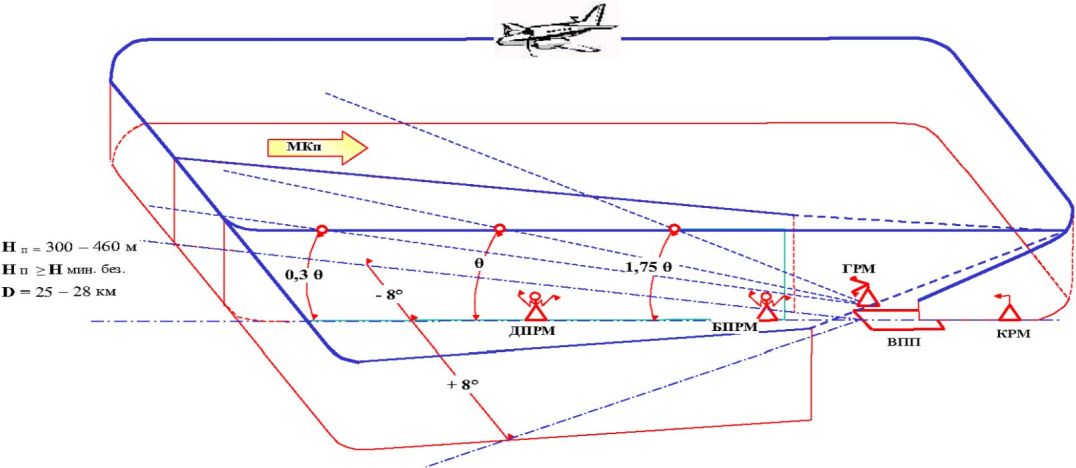
Типовые схемы маневрирования ВСЛ при летной проверке РМС инструментального захода ВС на посадку приведены на рисунке N 1 настоящего приложения.
проверке РМС инструментального захода ВС на посадку
Траектория полета ВСЛ при измерении параметров и характеристик РМС приведена на рисунке 2 настоящего приложения.

на траектории снижения при летной проверке РМС
При проведении измерений траекторию полета ВСЛ рекомендуется выдерживать по индикаторам положения курса и глиссады в центре шкалы навигационного прибора, при этом крен ВС выдерживается в пределах не более +/- 5°.
В процессе проведения летной проверки ИО АЛК информирует командира ВСЛ и ИТП проверяемого радиомаяка о предстоящем заходе ВСЛ для проведения измерений.
Периодическая летная проверка РМС выполняется по годовой или по полугодовой программе. Срок выполнения следующей годовой или полугодовой летной проверки РМС исчисляется от даты утверждения акта крайней выполненной годовой летной проверки. Срок выполнения летной проверки через 6 месяцев эксплуатации РМС II категории исчисляется от даты выполнения вводной летной проверки.
2. Летная проверка КРМ
2.1 Перечень параметров, рекомендуемых к проверке при вводной ЛП КРМ, приведен в таблице N 1.
N п/п | Наименование параметра, характеристики | Примечание |
1 | АХ КРМ | |
2 | а) ЗД КРМ в горизонтальной плоскости под углами 0°; +/- 10°; +/- 35° к осевой линии ВПП | Для двухчастотного КРМ первый комплект проверяется под углами 0°, +10°, -35° (или 0°, -10°, +35°); второй - 0°; -10°; +35° (или 0°, +10°, -35°) соответственно. Для одночастотного КРМ каждый комплект проверяется под углами 0° и +/- 10° |
б) напряженность поля КРМ (Eк) | ||
в) опознавание | ||
3 | ЗД КРМ в вертикальной плоскости: | |
а) под углами 0° к осевой линии ВПП | ||
б) под углами +/- 10° и +/- 35° к осевой линии ВПП | Для одночастотного КРМ каждый комплект проверяется под углами 0° и +/- 10° | |
4 | ВСП КРМ | |
5 | Положение средней ЛК, приведенное к порогу ВПП (L0) | |
6 | Амплитуда искривлений линии курса | |
7 | Чувствительность к смещению от ЛК (Sк) | |
8 | Положение средней ЛК, при котором срабатывает СА в режиме "АВАРИЯ" (LАП(АЛ)) | |
9 | Отклонение чувствительности к смещению от ЛК от номинального значения при срабатывании САК  | |
10 | При уменьшении мощности: а) ЗД в горизонтальной плоскости под углом 0° к осевой линии ВПП | |
б) ЗД в вертикальной плоскости под углом 0° к осевой линии ВПП | ||
в) амплитуда искривлений ЛК |
2.2 Перечень параметров, рекомендуемых к проверке при годовой, периодической ЛП КРМ, приведен в таблице N 2.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Азимутальная характеристика КРМ | |
2 | ЗД КРМ в горизонтальной плоскости под углом 0° к осевой линии ВПП | |
3 | Положение средней ЛК, приведенное к порогу ВПП (L0) | |
4 | Опознавание | При периодической и специальной летной проверке может проверяться с использованием наземной КИА |
5 | Амплитуда искривлений ЛК | |
6 | Чувствительность к смещению от ЛК (Sк) | |
7 | Положение средней ЛК, при котором срабатывает САК в режиме "АВАРИЯ" (LАП(АЛ)) | |
8 | Отклонение чувствительности к смещению от ЛГ от номинального значения при срабатывании САК  |
2.3 Перечень параметров, рекомендуемых к проверке при полугодовой, периодической ЛП КРМ, приведен в таблице N 3.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Положение средней ЛК, приведенное к порогу ВПП (L0) | |
2 | Амплитуда искривлений ЛК | |
3 | Чувствительность к смещению от ЛК (Sк) |
2.4 Значения параметров КРМ приведены в таблице N 4.
ИС МЕГАНОРМ: примечание. Сноски в таблице даны в соответствии с официальным текстом документа. |
N п/п | Наименования параметров | Единицы измерений | Нормы параметров | ||
РМС-I | РМС-II | РМС-III | |||
ЗД КРМ в горизонтальной плоскости, не менее, в секторах: | |||||
а) +/- 10° | [км] | 46,3 | |||
б) +/- 35° (для 2-частотных КРМ) | [км] | 32 | |||
ЗД КРМ в вертикальной плоскости, не менее | [градус] | 7 | |||
Eк, не менее: | |||||
а) на границах ЗД КРМ | [мкВ/м] | 40 | 40 | 40 | |
б) на глиссаде в пределах сектора КРМ на удалении 18,5 км от КРМ | [мкВ/м] | 90 | 100 | 100 | |
в) в точке "T" | [мкВ/м] | - | |||
г) от точки "D" до точки "E" | [мкВ/м] | - | - | 100 | |
4. | Опознавание | Оценка специалиста (ОС) | Состоит из трех букв: первая - "И", вторая и третья - код аэродрома или ВПП. Ясная слышимость в ЗД КРМ | ||
5. | АХ КРМ в секторах: | ||||
а) от ЛК до угла с РГМ = 0,180 | [РГМ] | монотонное | монотонное | монотонное | |
б) от ЛК до угла с РГМ = -0,180 | [РГМ] | монотонное | монотонное | монотонное | |
в) от угла с РГМ = 0,180 до угла 10°, не менее | [РГМ] | 0,180 | 0,180 | 0,180 | |
г) от угла с РГМ = -0,180 до угла минус 10°, не более | [РГМ] | -0,180 | -0,180 | -0,180 | |
д) от угла 10° до угла 35°, не менее | [РГМ] | 0,155 | 0,155 | 0,155 | |
е) от угла минус 10° до угла минус 35°, не более | [РГМ] | -0,155 | -0,155 | -0,155 | |
6. | ЛК: | ||||
а) пределы установки и подержания L0 в опорной точке РМС | [м] | +/- 10,5 | +/- 7,5 | +/- 3,0 | |
- от границы ЗД КРМ до точки "A" | [РГМ] | 0,031 | 0,031 | 0,031 | |
- от точки "A" до точки "B" | [РГМ] | линейное | линейное | линейное | |
- от точки "B" до точки "C" | [РГМ] | 0,015 | - | - | |
- от точки "B" до точки "T" | [РГМ] | - | 0,005 | - | |
- от точки "B" до точки "D" | [РГМ] | - | - | 0,005 | |
- от точки "D" до точки "E" | [РГМ] | - | - | линейное | |
7. | ВСП КРМ при крене ВСЛ +/- 20° на ЛК, не более | [РГМ] | 0,016 | 0,008 | 0,005 <3> |
8. | Sк: | ||||
а) Sкн в пределах ПС у порога ВПП <4> | [РГМ/м] | 0,00145 | 0,00145 | 0,00145 | |
б) пределы, в которых должно поддерживаться | [% от номинального значения] | +/- 17 | +/- 17 | +/- 10 | |
9. | Срабатывание САК КРМ: | ||||
а) при смещении LАП(АЛ) относительно осевой линии ВПП в опорной точке РМС, не более | [м] | +/- 10,5 | +/- 7,5 | +/- 6,0 | |
б) при изменении | [% от номинального значения] | +/- 17 | +/- 17 | +/- 17 | |
в) при уменьшении мощности излучения до 50% (одночастотный) или до 80% (двухчастотный) | *** | ||||
Примечание: *** - Единица измерения каждого из параметров определяется рекомендациями, установленными для него настоящим документом.
--------------------------------
<2> В пределах сектора с РГМ = +/- 0,02.
<3> Для КРМ ИЛС I категории на коротких ВПП с кодами "Д" и "Е" - за величину Sкн принимается значение, приведенное к т. "B".
2.5 Летная проверка КРМ выполняется ВСЛ. Для оценки параметров и характеристик КРМ аппаратура летного контроля обеспечивает построение опорной траектории движения ВСЛ.
Основной режим построения опорной траектории движения ВСЛ - на основе информации, получаемой от глобальной навигационной спутниковой системы. Для обеспечения необходимой точности определения местоположения ВСЛ на аэродроме установки проверяемой РМС размещается наземная станция поправок из состава АЛК ВСЛ, которая обеспечивает передачу на АЛК ВСЛ дифференциальных поправок.
Наземная станция поправок размещается в точке с известными географическими координатами, которые записываются в АЛК ВСЛ.
В случае, если в месте установки радиомаяка сигналы ГНСС АЛК ВСЛ не принимаются, опорная траектория строится с использованием оптической системы траекторных измерений и блока эталонного дальномера.
Оптическая система траекторных измерений размещается на площадке УТЗ. Площадка УТЗ должна иметь твердое (бетонное) покрытие и размещаться на продолжении осевой линии ВПП, за АФУ КРМ. С целью исключения влияния АФУ КРМ на работу оптической системы траекторных измерений желательно, чтобы площадка УТЗ была поднята выше АФУ КРМ.
Рекомендации для размещения оптической системы траекторных измерений изложены в руководстве по эксплуатации АЛК ВСЛ.
Место установки блока эталонного дальномера определяется в соответствии с руководством по эксплуатации АЛК ВСЛ.
Методика летной проверки КРМ не зависит от применяемого оборудования построения опорной траектории движения ВСЛ.
2.6 Проверка зависимости информационного параметра курсового сигнала (РГМ) от угла относительно линии курса, соответствующего этому параметру (далее - азимутальная характеристика КРМ (АХ КРМ) - клиренс при смещении от линии курса), выполняется для определения того, что излучаемый сигнал КРМ обеспечивает экипаж правильной информацией о смещении ВС относительно линии курса и что отсутствуют геометрические места точек в любой горизонтальной плоскости, в которых РГМ равна нулю, и отличающиеся от геометрического места точек, образующего линию курса (далее - ложные курсы).
АХ КРМ (клиренс) проверяется только в угловых пределах зоны действия радиомаяка, обеспечивающей с каждой стороны посадочного курса угол, равный +/- 35°, за исключением случаев, когда для захода на посадку используется обратный курс. В этих случаях клиренс также проверяется в угловых пределах зоны действия обратного курса.
В целях проверки наличия ложных курсов вне зоны действия радиомаяка рекомендуется при вводе КРМ в эксплуатацию проводить полет по круговой траектории с постоянной абсолютной высотой и с постоянным расстоянием от АФУ КРМ (далее - орбитальный полет). Ложные курсы могут быть обусловлены характеристиками диаграммы направленности АФУ КРМ или условиями окружающего рельефа местности.
Проверка АХ КРМ при больших углах места осуществляется в угловых пределах обеспечиваемой зоны действия таким же способом, что и проверка клиренса при смещении от линии курса, на высоте, соответствующей углу места, равному 7° относительно горизонтали, проходящей через АФУ КРМ. Если условия рельефа местности требуют, чтобы высота захода на посадку превышала 1800 м (6000 фут) относительно АФУ КРМ, то летную проверку выполняют на больших высотах для подтверждения отсутствия ложных курсов, оказывающих существенное влияние на выполнение полета рейсовых ВС.
Измерения АХ КРМ (клиренса) выполняются при маневрировании ВСЛ по орбите радиусом 7 - 15 км (4 - 8 м. миль) от места установки АФУ КРМ и на высоте 300 - 460 м (1000 - 1500 фут), но не ниже безопасной. В случае влияния рельефа местности высота полета выбирается такой, при которой обеспечивается линия прямой видимости между ВСЛ и АФУ КРМ. АЛК работает в режиме определения АХ КРМ в соответствии с РЭ АЛК.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра (далее - ИП) КРМ РГМi и угла отклонения ВСЛ от осевой линии ВПП  , по которым проводятся экспресс-анализ и оценка АХ КРМ (клиренса) в соответствии с РЭ АЛК. Запись контролируемых ИП КРМ (РГМi,
, по которым проводятся экспресс-анализ и оценка АХ КРМ (клиренса) в соответствии с РЭ АЛК. Запись контролируемых ИП КРМ (РГМi,  ) осуществляется в устройстве регистрации АЛК.
) осуществляется в устройстве регистрации АЛК.
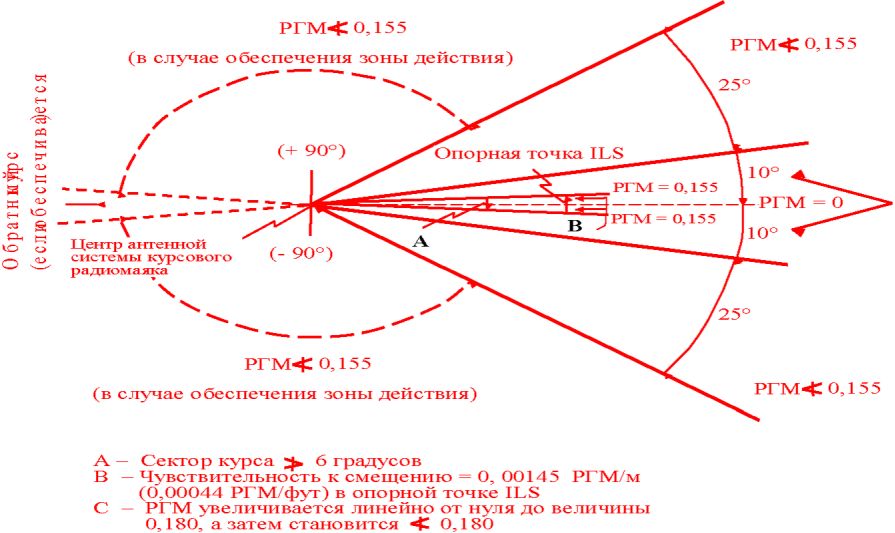
Информационный параметр КРМ РГМi монотонно возрастает при угловом отклонении ВСЛ  в горизонтальной плоскости от линии курса, где ИП равен нулю, до углов с РГМ, равных +/- 0,18, где ИП монотонно увеличивается, и от углов с РГМ, равных +/- 0,18, до углов +/- 10° информационный параметр не может быть менее РГМ, равных +/- 0,18, и от углов +/- 10° до углов +/- 35° значение ИП на выходе курсового приемника не может быть менее РГМ, равных +/- 0,155, не допускается уменьшение ИП до нуля и изменение его знака.
в горизонтальной плоскости от линии курса, где ИП равен нулю, до углов с РГМ, равных +/- 0,18, где ИП монотонно увеличивается, и от углов с РГМ, равных +/- 0,18, до углов +/- 10° информационный параметр не может быть менее РГМ, равных +/- 0,18, и от углов +/- 10° до углов +/- 35° значение ИП на выходе курсового приемника не может быть менее РГМ, равных +/- 0,155, не допускается уменьшение ИП до нуля и изменение его знака.
Для курсового радиомаяка РМС с зоной действия, равной 360°, значение ИП РГМi за пределами сектора, равного +/- 35°, не может быть менее 0,155. При ограничении зоны действия КРМ из-за рельефа местности или по другим объективным причинам схема маневрирования ВСЛ при измерении АХ КРМ определяется командиром ВСЛ, ИО АЛК и ИТП служб УВД и ЭРТОС организации, на эксплуатации которой находятся средства РТОП и связи, с учетом аэронавигационного паспорта аэродрома (инструкции по производству полетов).
В процессе измерения АХ КРМ контролируется кодированный сигнал опознавания, который передается КРМ. Опознавание считается удовлетворительным, если кодовые знаки правильны, четко различимы и передаются с надлежащими интервалами.
2.7 Проверка определенного сектора воздушного пространства в горизонтальной плоскости, в пределах которого сигнал курсового радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия КРМ в горизонтальной плоскости - дальность действия) выполняется для подтверждения того, что КРМ обеспечивает пользователя правильной информацией в пределах всей зоны эксплуатационного применения радиомаяка.
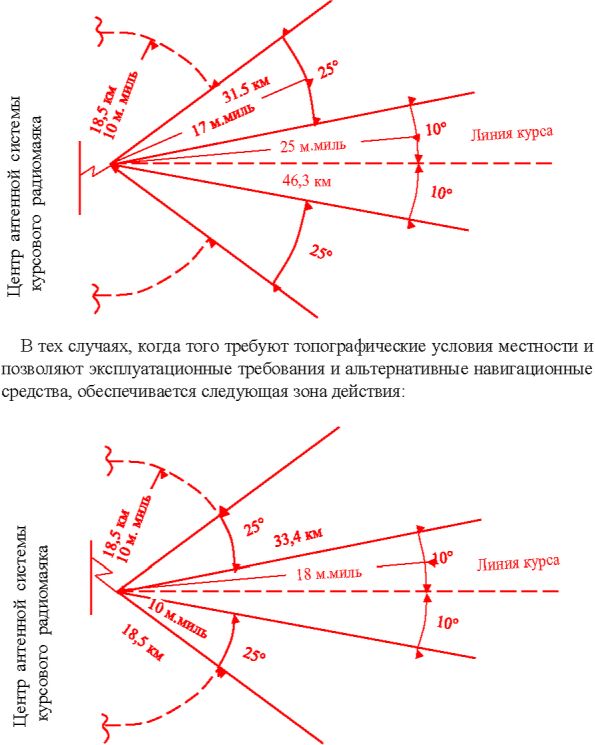
Зона действия КРМ в горизонтальной плоскости (ЗДкг) охватывает сектор от фазового центра его АФУ до следующих расстояний:
46,3 км (25 м. миль) в пределах сектора +/- 10° относительно линии курса;
31,5 км (17 м. миль) в секторе между 10° и 35° относительно линии курса;
18,5 км (10 м. миль) за пределами сектора +/- 35°, если обеспечивается такая зона действия.
В тех случаях, когда этого требуют топографические условия или это допускается эксплуатационными требованиями, указанные пределы могут быть уменьшены до 33,4 км (18 м. миль) в пределах сектора +/- 10° и 18,5 км (10 м. миль) в пределах остальной части зоны действия при условии, что другие радионавигационные средства обеспечивают удовлетворительную зону действия в пределах промежуточного участка захода на посадку. Сигналы КРМ принимаются на указанных расстояниях на высоте 600 м (2000 фут) и более относительно высоты порога ВПП или 300 м (1000 фут) относительно наивысшей точки препятствия в пределах промежуточного и конечного участков захода на посадку в зависимости от того, какая из величин больше.
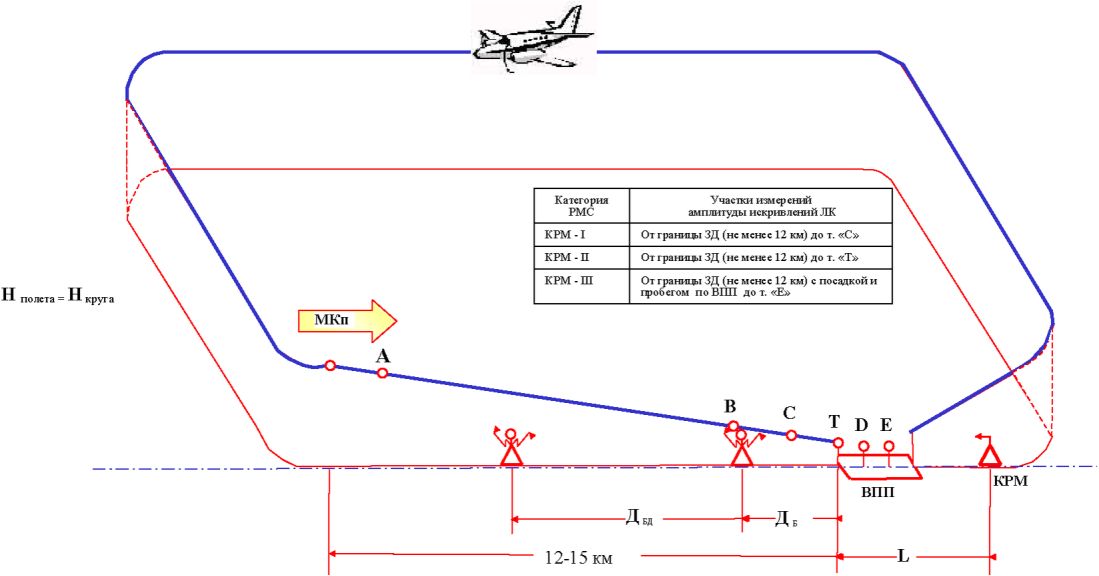
Характеристики зоны действия КРМ в горизонтальной плоскости приведены на рисунке 3 настоящего приложения. Зона действия КРМ в горизонтальной плоскости определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме. Измерения ЗДкг выполняются с удалений ВСЛ от АФУ КРМ:
не менее 46,3 км (25 м. миль) с курсом посадки, последующим снижением по глиссаде и завершаются:
в точке "B" - для РМС, КРМ I категории;
в точке "T" - для РМС, КРМ II категории;
в точке "E" - для РМС, КРМ III категории;
не менее 46,3 км (25 м. миль) с курсами, отличными от посадочного на +/- 10°, измерения выполняются при маневрировании ВСЛ по орбите без снижения для РМС, КРМ I, II и III категорий;
не менее 31,5 км (17 м. миль) с курсами, отличными от посадочного на +/- 35°, измерения выполняются при маневрировании ВСЛ по орбите без снижения для РМС, КРМ I, II и III категорий.
В процессе маневрирования ВСЛ измеряются текущие значения напряженности электромагнитного поля радиомаяка (Ei) и дальности ВСЛ от АФУ КРМ (Дi) в соответствии с РЭ АЛК, по которым выполняются анализ и оценка ЗДкг. АЛК должна обеспечивать запись контролируемых ИП (Ei, Дi) для послеполетного анализа.
Напряженность электромагнитного поля КРМ (Ei) составляет:
на границах зоны действия КРМ - 40 мкВ/м;
на глиссаде снижения в пределах сектора курса и удалении 18,5 км (10 м. миль) от АФУ КРМ - 90 мкВ/м для РМС, КРМ I, II категорий и 100 мкВ/м для РМС, КРМ III категории;
в опорной точке "T" - не менее 200 мкВ/м для РМС, КРМ II и III категорий;
от опорной точки "T" до точек "D" и "E" - не менее 100 мкВ/м.
2.8 Проверка определенного сектора воздушного пространства в вертикальной плоскости, в пределах которого сигнал КРМ с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия КРМ в вертикальной плоскости) выполняется одновременно с полетами по проверке зоны действия КРМ в горизонтальной плоскости. Зона действия КРМ в вертикальной плоскости (ЗДкв) определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме на высоте 600 метров, но не ниже минимальной безопасной высоты без снижения с удаления не менее 46,3 км (25 м. миль) от АФУ КРМ до удаления, соответствующего проходу ВСЛ угла места, равного 7° с вершиной в центре АФУ КРМ.
Измерения зоны действия КРМ в вертикальной плоскости выполняются с удалений ВСЛ от АФУ КРМ, равных не менее 46,3 км (25 м. миль) с курсом посадки и курсами, отличными от посадочного на +/- 10° (для курсов, отличных от посадочного на +/- 35° - с не менее чем 31,5 км), и завершаются через 5 секунд после прохода ВСЛ угла места, равного 7°. В момент прохода ВСЛ точки, соответствующей углу, равному 7°, в вертикальной плоскости регистрируется значение напряженности электромагнитного поля радиомаяка (Ei).
По измеренным значениям напряженности электромагнитного поля КРМ (Ei) в момент прохода ВСЛ точки с углом места, равным 7°, в соответствии с РЭ АЛК выполняются анализ и оценка зоны действия КРМ в вертикальной плоскости. Запись контролируемых Ei и точки с углом места, равным 7°, осуществляется в АЛК для послеполетного анализа. В процессе выполнения заходов ВСЛ по проверке зоны действия КРМ в вертикальной плоскости контролируется кодированный сигнал опознавания, который передается курсовым радиомаяком. Опознавание считается удовлетворительным, если кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
2.9 Геометрическое место точек зоны действия КРМ, ближайших к осевой линии ВПП в горизонтальной плоскости, в которых ИП курсового сигнала (РГМ) равен нулю (далее - положение линии курса относительно осевой линии ВПП - точность юстировки курса (Lо)) определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме с последующим снижением по глиссаде и с дальнейшим уходом на второй круг для КРМ I и II категорий, с посадкой и пробегом по ВПП или полет на абсолютной высоте, не превышающей 15 м (50 фут) от порога ВПП до точки E с последующим уходом на второй круг для КРМ III категории.
При проведении измерений полная постоянная времени схем РГМ приемозаписывающего устройства должна быть соотнесена со скоростью воздушного судна 105 узлов, что соответствует постоянной времени, равной приблизительно 0,5 секунды. Схема маневрирования ВСЛ при проверке положения средней линии курса относительно оси ВПП для КРМ I, II и III категорий приведена на рисунке 4 настоящего приложения. Проверка положения линии курса относительно оси ВПП (проверка точности юстировки линии курса) выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений.
средней линии курса относительно оси ВПП
При этой проверке одновременно определяется смещение линии курса относительно среднего положения такой амплитуды и частоты, которое может отслеживаться воздушным судном, выполняющим заход на посадку по приборам (далее - амплитуда искривлений курсовой линии  (структура курса).
(структура курса).
Проверка положения средней линии курса (Lо) относительно осевой линии ВПП выполняется на траектории снижения ВСЛ:
от точки "A" до точки "B" - для РМС, КРМ I категории (рисунок 4);
от точки "B" до точки "T" - для РМС, КРМ II категории (рисунок 4);
от точки "C" до точки "D" - для РМС, КРМ III категории (рисунок 4).
Измерения амплитуды искривлений линии курса  проводятся при наличии устойчивой информации о траектории полета ВСЛ на участке не менее 15 - 20 км от АФУ КРМ до:
проводятся при наличии устойчивой информации о траектории полета ВСЛ на участке не менее 15 - 20 км от АФУ КРМ до:
точки "C" - для РМС, КРМ I категории;
точки "T" - для РМС, КРМ II категории;
точки "E" - для РМС, КРМ III категории.
В процессе маневрирования ВСЛ измеряются текущие значения ИП КРМ РГМi, угла отклонения ВСЛ от осевой линии ВПП  и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии курса (Lо) относительно оси ВПП и величина амплитуды искривлений курсовой линии
и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии курса (Lо) относительно оси ВПП и величина амплитуды искривлений курсовой линии  . АЛК должна обеспечивать запись контролируемых ИП (РГМi,
. АЛК должна обеспечивать запись контролируемых ИП (РГМi,  , Дi) для послеполетного анализа.
, Дi) для послеполетного анализа.
В случае КРМ, предназначенных для выполнения посадок по III категории, ВСЛ выполняет стандартную схему захода на посадку на данном аэродроме с последующим снижением по глиссаде, посадкой и пробегом по ВПП от точки приземления до точки E. Допускается, вместо пробега по ВПП, выполнять полет на абсолютной высоте, не превышающей 15 м (50 фут) от порога ВПП до точки E с последующим уходом на второй круг.
По полученным результатам вычисляются и документируются:
точность юстировки линии курса (Lо);
амплитуды искривлений линии курса  .
.
Линейное отклонение линии курса от оси ВПП  в опорной точке РМС ("T") определяется по формуле:
в опорной точке РМС ("T") определяется по формуле:

где  - линейное отклонение линии курса от оси ВПП у ее порога, м;
- линейное отклонение линии курса от оси ВПП у ее порога, м;
D - расстояние от КРМ до порога ВПП со стороны захода на посадку, м;
Расстояние между осью ВПП и средней линией курса (Lо), измеренное у начала ВПП со стороны захода на посадку  в опорной точке РМС ("T"), составляет не более:
в опорной точке РМС ("T"), составляет не более:
+/- 10,5 м (+/- 35,0 фут) - для РМС, КРМ I категории;
+/- 7,5 м (+/- 25,0 фут) - для РМС, КРМ II категории;
+/- 3,0 м (+/- 10,0 фут) - для РМС, КРМ III категории.
Допуски на величину амплитуды искривлений линии курса  КРМ составляют не более:
КРМ составляют не более:
на участке не менее 15 - 20 км от АФУ КРМ до точки "A" +/- 0,031 РГМ (+/- 50,0 мкА) - для КРМ I, II и III категорий;
от точки "A" до точки "B" линейное уменьшение до +/- 0,015 РГМ, (+/- 25,0 мкА) - для КРМ I категории и до +/- 0,005 РГМ (+/- 8,0 мкА) - для КРМ II и III категорий;
от точки "B" до точки "C" +/- 0,015 РГМ (+/- 25,0 мкА) - для КРМ I категории;
от точки "B" до опорной точки "T" +/- 0,005 РГМ (+/- 8,0 мкА) - для КРМ II категории;
от точки "B" до точки "D" +/- 0,005 РГМ (+/- 8,0 мкА) и затем линейное увеличение до +/- 0,01 РГМ (+/- 16,0 мкА) в точке "E" - для КРМ III категории.
2.10 Проверка отношения измеренной РГМ к соответствующему боковому смещению относительно соответствующей опорной линии (далее - чувствительность к смещению от линии курса (Sк)) осуществляется при маневрировании ВСЛ с имитацией посадки по границам полусектора курса. Полусектор КРМ в горизонтальной плоскости, содержащий линию курса и ограниченный геометрическими местами точек, ближайших к линии курса, в которых РГМ равна 0,0775 (далее - полусектор курса) при использовании метода с имитацией захода на посадку, определяется при маневрировании ВСЛ по обе стороны от линии курса со снижением по глиссаде от точки "A" до точки "B" для КРМ I, II и III категорий и дальнейшим уходом на второй круг.
Номинальный полусектор  курса определяется по формуле:
курса определяется по формуле:
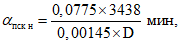
где 0,0775 - номинальная величина РГМ на границе полусектора курса;
3438 - коэффициент перевода тангенса угла полусектора курса;
0,00145 - номинальная чувствительность к смещению от линии курса;
D - расстояние от КРМ до порога ВПП со стороны захода на посадку, м.
Ширина полусектора курса определяется как сумма правой  и левой
и левой  частей полусектора и составляет величину не более 3,0°. Размеры правой
частей полусектора и составляет величину не более 3,0°. Размеры правой  и левой
и левой  частей полусектора курса по возможности устанавливаются как можно симметричнее. Схема маневрирования ВСЛ при измерении чувствительности к смещению от линии курса приведена на рисунке 5 настоящего приложения.
частей полусектора курса по возможности устанавливаются как можно симметричнее. Схема маневрирования ВСЛ при измерении чувствительности к смещению от линии курса приведена на рисунке 5 настоящего приложения.
чувствительности к смещению от линии курса
В процессе маневрирования ВСЛ измеряются текущие значения ИП КРМ на границах полусектора (РГМпск п(л)i), угла отклонения ВСЛ от границы правой/левой части полусектора курса  и дальности от АФУ КРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики КРМ. АЛК должна обеспечивать запись контролируемых ИП (РГМпск п(л)i,
и дальности от АФУ КРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики КРМ. АЛК должна обеспечивать запись контролируемых ИП (РГМпск п(л)i,  , Дi) для послеполетного анализа.
, Дi) для послеполетного анализа.
и дальности от АФУ КРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики КРМ. АЛК должна обеспечивать запись контролируемых ИП (РГМпск п(л)i, , Дi) для послеполетного анализа.По полученным результатам вычисляются и документируются:
величина правой (левой) части полусектора курса  у порога ВПП, значение чувствительности к смещению от линии курса (Sк) и ее отклонение
у порога ВПП, значение чувствительности к смещению от линии курса (Sк) и ее отклонение  от номинального значения по формулам:
от номинального значения по формулам:
у порога ВПП, значение чувствительности к смещению от линии курса (Sк) и ее отклонение 

где Sк - чувствительности к смещению от линии курса, РГМ/м;
коэффициент B = 532,9 (РМС/ILS), B = 60150 (РМС/СП);
D - расстояние от КРМ до порога ВПП со стороны захода на посадку, м;
 - величина правой (левой) части полусектора курса, м;
- величина правой (левой) части полусектора курса, м;Sкф и Sкн - фактическая и номинальная чувствительности к смещению от линии курса, РГМ/м.
Изменения ИП (РГМпск п(л)i) и чувствительность к смещению от линии курса - крутизна характеристики КРМ (Sк) приведены на рисунке 6 настоящего приложения. Отклонение ИП КРМ  , который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВСЛ от линии курса (крутизна характеристики выходного сигнала канала курса) от установленного значения справа (слева) от линии курса составляет не более:
, который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВСЛ от линии курса (крутизна характеристики выходного сигнала канала курса) от установленного значения справа (слева) от линии курса составляет не более:
17,0% - для РМС, КРМ I и II категорий;
10,0% - для РМС, КРМ III категории.
к смещению от линии курса
2.11 Проверка отклонения линии курса в результате наличия нежелательных вертикально-поляризованных составляющих сигналов радиомаяка на качество пилотирования ВС (далее - влияние вертикальной составляющей поляризации поля КРМ - ВСП) выполняется при вводе КРМ в эксплуатацию.
Для оценки влияния вертикальной составляющей поляризации поля КРМ осуществляется маневрирование ВСЛ по стандартной схеме захода на посадку на данном аэродроме по линии курса на высоте 300 м, но не менее безопасной, без снижения с периодическими кренами ВСЛ на +/- 20° вправо и влево относительно продольной оси ВСЛ. Причем ввод ВСЛ в крен +/- 20° и возврат его в исходное положение нулевого крена выполняется за время не более 5 секунд, и этот маневр необходимо повторить не менее 20 раз в каждую сторону. В процессе указанных эволюций ВСЛ при отсутствии крена и при кренах +/- 20° удерживается на продолжении осевой линии ВПП.
Измерения проводятся с удалений ВСЛ от АФУ КРМ, равных 25 - 30 км с курсом посадки и завершаются в точке "B" - для РМС, КРМ I, II и III категорий.
По результатам измерений в соответствии с РЭ АЛК вычисляется величина ИП (РГМ, ток в цепи индикатора курса бортового приемника), вызванная наличием вертикально-поляризованного излучения КРМ на линии курса, которая составляет не более:
+/- 0,016 РГМ (+/- 25,0 мкА) - для КРМ I категории;
+/- 0,008 РГМ (+/- 13,0 мкА) - для КРМ II категории;
+/- 0,005 РГМ (+/- 8,0 мкА) - для КРМ III категории.
2.12 Проверка работы системы автоматического контроля КРМ (далее - САК КРМ) проводится с использованием методов, рекомендуемых в руководстве по эксплуатации на данный тип РМС инструментального захода ВС на посадку:
а) проверка САК КРМ при смещении положения средней линии курса осуществляется при полете ВСЛ по осевой линии ВПП в соответствии с методикой, приведенной в пункте 2.9. Для того, чтобы при отклонении линии курса  от номинального значения за пределы установленных допусков:
от номинального значения за пределы установленных допусков:
КРМ I категории: +/- 10,5 м/35,0 фут;
КРМ II категории: +/- 7,5 м/25,0 фут;
КРМ III категории: +/- 6,0 м/20,0 фут,
подавался сигнал "аварии", наземный ИТП РМС регулирует оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение ЛК вправо и влево от оси ВПП) эта регулировка вызывала срабатывание аварийной сигнализации устройства контроля положения линии курса ("авария по нулю"),
б) проверку САК КРМ при увеличении (уменьшении) чувствительности к смещению от линии курса (при изменении крутизны характеристики КРМ) целесообразно проводить после обычной проверки чувствительности к смещению по методике, приведенной в пункте 2.10. При этой проверке наземный ИТП радиомаяка настраивает чувствительность к смещению от линии курса (крутизну характеристики КРМ) на широкие (расширение полусектора курса - уменьшение чувствительности) и узкие (сужение полусектора курса - увеличение чувствительности) пределы срабатывания сигналов "аварии", и производится проверка чувствительности к смещению в каждом из этих случаев до момента срабатывания системы автоматического контроля ("авария по крутизне"),
в) проверка САК КРМ при уменьшении мощности излучения радиомаяка проводится только при вводе КРМ в эксплуатацию. Напряженность поля, создаваемого сигналом КРМ (Ек), измеряется на линии курса, на максимально используемом расстоянии, но не менее 33,3 км (18 м. миль) при мощности радиомаяка, составляющей 80% от номинального значения для двухчастотного радиомаяка и 50% от номинального значения для одночастотного КРМ. При величине напряженности электромагнитного поля (Ек) менее 40 мкВ/м мощность радиомаяка увеличивается для обеспечения напряженности, равной, по крайней мере, 40 мкВ/м, а предел срабатывания контрольного устройства настраивается таким образом, чтобы сигнал "аварии" срабатывал при этом уровне.
Кроме того, при выполнении этой проверки проводятся измерения и оценка величины амплитуды искривлений курсовой линии  в соответствии с методикой, приведенной в пункте 2.7.
в соответствии с методикой, приведенной в пункте 2.7.
3. Летная проверка ГРМ
3.1 Перечень параметров, рекомендуемых к проверке при вводной ЛП ГРМ, приведен в таблице N 5.
N п/п | Наименование параметра, характеристики | Примечание |
1 | УХ ГРМ | |
2 | ЗД ГРМ в горизонтальной плоскости: | |
а) под углами 0° и +/- 8° к осевой линии ВПП | ||
б) напряженность поля ГРМ (Eг) | ||
3 | ЗД ГРМ в вертикальной плоскости под углами к осевой линии ВПП: | |
а) 0° | ||
б) +/- 8° | ||
4 | Фазирование антенн | |
5 | Угол наклона глиссады | |
6 | Высота опорной точки ИЛС (Hот) | |
7 | Амплитуда искривлений ЛГ | |
8 | Чувствительность к смещению от ЛГ (Sг) | |
9 | Влияние широкого канала на | |
10 | Пределы срабатывания САК при смещении глиссады  | |
11 | Отклонение чувствительности к смещению от ЛГ от номинального значения при срабатывании САК  | |
12 | При уменьшении мощности: | |
а) ЗД ГРМ в горизонтальной плоскости под углами 0° и +/- 8° к осевой линии ВПП | ||
б) Амплитуда искривлений ЛГ |
3.2 Перечень параметров, рекомендуемых к проверке при годовой периодической ЛП ГРМ, приведен в таблице N 6.
N п/п | Наименование параметра, характеристики | Примечание |
1 | УХ ГРМ | |
2 | ЗД ГРМ в горизонтальной плоскости под углом 0° к осевой линии ВПП | |
3 | Угол наклона глиссады | |
4 | Амплитуда искривлений ЛГ | |
5 | Чувствительность к смещению от ЛГ (Sг) | |
6 | Пределы срабатывания САК при смещении глиссады  | |
7 | Отклонение чувствительности к смещению от ЛГ от номинального значения при срабатывании САК  | |
8 | Sг - восстановление |
3.3 Перечень параметров, рекомендуемых к проверке при полугодовой периодической ЛП ГРМ, приведен в таблице N 7.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Угол наклона глиссады | |
2 | Амплитуда искривлений ЛГ | |
3 | Чувствительность к смещению от ЛГ (Sг) |
3.4 Значения параметров ГРМ приведены в таблице N 8.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров | ||
РМС-I | РМС-II | РМС-III | |||
1. | Фазирование антенн ГРМ | *** | Соотв. ЭД | ||
ЗД ГРМ в горизонтальной плоскости в секторе с углами 8° по обеим сторонам от линии глиссады РМС | [км] | 18,5 | |||
ЗД ГРМ в вертикальной плоскости в секторе с углами: | |||||
а) верхней границы | [градус] | ||||
б) нижней границы | [градус] | ||||
Ег в ЗД ГРМ, не менее | [мкВ/м] | 400 | 400 | 400 | |
5. | УХ ГРМ в секторах: | ||||
а) вверх от ЛГ до угла, где РГМ = 0,175 | [РГМ] | плавное | |||
б) вверх от угла где РГМ = 0,175 до угла | [РГМ] | 0,22 | |||
в) вниз от ЛГ до угла, где РГМ = 0,22 | [РГМ] | плавное | |||
г) вниз от угла, где РГМ = 0,22 до угла | [РГМ] | 0,22 <2> | |||
6. | ЛГ: | ||||
а) номинальный | [градус] | 2 ... 4 | 2 ... 4 | 2 ... 4 | |
б) | [отн. ед.] |  |  | ||
в) Hот | [м] | 15 + 3 | 15 + 3 | 15 + 3 | |
- от границы ЗД ГРМ до точки "A" | [РГМ] | 0,035 | 0,035 | 0,035 | |
- от точки "A" до точки "B" | [РГМ] | - | линейное | линейное | |
- от точки "A" до точки "C" | [РГМ] | 0,035 | - | - | |
- от точки "B" до точки "T" | [РГМ] | - | 0,023 | 0,023 | |
7. | Sгн: | ||||
а) положение границ ПС глиссады относительно номинального угла | |||||
- выше глиссады <3> | [угл. мин] |  |  |  | |
- ниже глиссады <3> | [угл. мин] |  |  |  | |
б) пределы, в которых должно поддерживаться | [% от установочного номинального значения] | ||||
8. | Влияние широкого канала на положение ср. ЛГ | мин. | |||
9. | Срабатывание САК ГРМ: | ||||
а)  , не более , не более | [отн. ед.] |  | |||
б) | [% от установочного номинального значения] | ||||
в) при уменьшении мощности излучения до 50% (одночастотный) или до 80% (двухчастотный ГРМ) | *** | ||||
Примечание: *** - Единица измерения каждого из параметров определяется рекомендациями, установленными для него настоящим документом.
--------------------------------
<2> Если плавное уменьшение РГМ не достигается под углом  , то угол, при котором РГМ = -0,22, должен быть не менее
, то угол, при котором РГМ = -0,22, должен быть не менее  .
.
3.5 Летная проверка ГРМ выполняется ВСЛ. Для оценки параметров и характеристик ГРМ аппаратура летного контроля обеспечивает построение опорной траектории движения ВСЛ.
Основной режим построения опорной траектории АЛК ВСЛ на основе информации, получаемой от глобальных навигационных спутниковых систем. Для обеспечения необходимой точности определения местоположения ВСЛ на аэродроме установки проверяемой РМС размещается наземная станция поправок из состава АЛК ВСЛ, которая обеспечивает передачу на АЛК ВСЛ дифференциальных поправок.
Наземная станция поправок размещается в точке с известными географическими координатами, которые записываются в АЛК ВСЛ.
В случае если в месте установки радиомаяка сигналы ГНСС АЛК ВСЛ не принимаются, опорная траектория строится с использованием оптической системы траекторных измерений и блока эталонного дальномера.
В составе АЛК ВСЛ могут применяться следующие оптические системы траекторных измерений "Минилир-АТ" или УТЗ-М.
"Минилир-АТ" применяется для летной проверки РМС I - III категории ИКАО, УТЗ-М применяется для летной проверки РМС I - II категории ИКАО.
Оптическая система траекторных измерений размещается на площадке УТЗ. Площадка УТЗ должна иметь твердое (бетонное) покрытие и размещаться в непосредственной близости от АФУ ГРМ.
Рекомендации по размещению оптической системы траекторных измерений изложены в руководстве по эксплуатации АЛК ВСЛ.
Место установки блока эталонного дальномера определяется в соответствии с руководством по эксплуатации АЛК ВСЛ.
Методика летной проверки ГРМ не отличается в зависимости от применяемого оборудования построения опорной траектории движения ВСЛ.
3.6 Фазированием антенн ГРМ (летная настройка - "фазировка по воздуху") является подтверждение наличия оптимальной фазы между передающими антеннами радиомаяка. Данная проверка проводится при вводе РМС в эксплуатацию (при необходимости - при периодических летных проверках). Проверка правильности фазирования антенн ГРМ с помощью летных измерений проводится с использованием методов, рекомендуемых в руководстве по эксплуатации на данный тип РМС инструментального захода ВС на посадку. Перед выполнением этой проверки ИО АЛК согласовывает свои действия с наземным ИТП радиомаяка с целью выбора схемы маневрирования ВСЛ и определения оптимальной зоны для проведения летной настройки ГРМ.
Проверка фазирования АФУ ГРМ осуществляется при горизонтальном полете ВСЛ по стандартной схеме захода на посадку на данном аэродроме с удаления, равного 25 - 28 км от порога ВПП по линии курса, без снижения, на высоте 300 - 460 м (1000 - 1500 фут), но не ниже безопасной и завершаются на расстоянии 8 - 12 км от порога ВПП. Через каждые 2 - 3 секунды ИО АЛК информирует по радиосвязи ИТП радиомаяка о величине выходного тока навигационного приемника по каналу глиссады. Схема маневрирования ВСЛ при проверке фазирования АФУ ГРМ приведена на рисунке 7 настоящего приложения.
фазировании АФУ, зоны действия ГРМ в горизонтальной
и вертикальной плоскостях
3.7 Проверка зависимости ИП глиссадного сигнала (РГМ) от угла относительно линии глиссады, соответствующего этому параметру (далее - угломестная характеристика ГРМ (УХ ГРМ) - клиренс при смещении от линии глиссады), позволяет убедиться в наличии безопасной зоны между нижней и верхней границами сектора глиссады, что свидетельствует о правильности фазирования передающих антенн ГРМ.
УХ ГРМ определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме по линии курса в направлении на ГРМ с удаления (зависит от установленного (номинального) угла глиссады  данного направления посадки и высоты полета ВСЛ), соответствующего углу места, равному
данного направления посадки и высоты полета ВСЛ), соответствующего углу места, равному  , до расстояния, соответствующего углу места, равному
, до расстояния, соответствующего углу места, равному  , от АФУ ГРМ с проходом точки "B", без снижения, на высоте полета 300 - 460 м (1000 - 1500 фут), но не менее безопасной.
, от АФУ ГРМ с проходом точки "B", без снижения, на высоте полета 300 - 460 м (1000 - 1500 фут), но не менее безопасной.
Схема маневрирования ВСЛ при проверке УХ ГРМ приведена на рисунке 7 настоящего приложения. Измерения ИП (РГМi,  ) выполняются при наличии устойчивой информации о траектории полета ВСЛ с максимально возможного удаления и завершаются после прохода ВСЛ точки "B". Запись контролируемых ИП (РГМi,
) выполняются при наличии устойчивой информации о траектории полета ВСЛ с максимально возможного удаления и завершаются после прохода ВСЛ точки "B". Запись контролируемых ИП (РГМi,  ) осуществляется в АЛК для послеполетного анализа.
) осуществляется в АЛК для послеполетного анализа.
Значение информационного параметра радиомаяка (РГМi) составляет:
ниже глиссады: от угла места, равного  , до угла, равного
, до угла, равного  относительно горизонта - линейное возрастание РГМ от 0 до РГМ >= 0,22; от угла, равного
относительно горизонта - линейное возрастание РГМ от 0 до РГМ >= 0,22; от угла, равного  , до угла, равного
, до угла, равного  , - значение РГМ >= 0,22. Если значение РГМ >= 0,22 достигается под углом больше
, - значение РГМ >= 0,22. Если значение РГМ >= 0,22 достигается под углом больше  , необходимо поддерживать этот уровень до угла
, необходимо поддерживать этот уровень до угла  относительно горизонта;
относительно горизонта;
выше глиссады: от угла места, равного  - линейное возрастание РГМ от 0 до РГМ >= 0,22, до угла места, равного
- линейное возрастание РГМ от 0 до РГМ >= 0,22, до угла места, равного  . Если значение РГМ, равное 0,22, достигается под углом меньшим
. Если значение РГМ, равное 0,22, достигается под углом меньшим  , то РГМ поддерживается на уровне не менее 0,22 до угла, равного
, то РГМ поддерживается на уровне не менее 0,22 до угла, равного  .
.
3.8 Проверка определенного сектора воздушного пространства в горизонтальной плоскости, в пределах которого сигнал ГРМ с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия ГРМ в горизонтальной плоскости). Зона действия ГРМ в горизонтальной плоскости (ЗДгг) проверяется на расстояниях не менее 18,5 км (10,0 м. миль) от АФУ ГРМ. На удалениях более 18,5 км (10,0 м. миль) зона действия проверяется исходя из требований использования глиссады при заходе на посадку.
Проверка зоны действия ГРМ в горизонтальной плоскости при полетах по линии курса проводится одновременно с проверкой УХ ГРМ и использованием одного и того же профиля полета ВСЛ. Зона действия ГРМ в горизонтальной плоскости в пределах сектора, равного +/- 8°, относительно курсовой линии определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме без снижения, на высоте 300 - 460 м (1000 - 1500 фут), но не ниже безопасной и дальнейшим уходом на второй круг, с удалений от АФУ ГРМ, равных 20 - 22 км, с курсами полета, отличными от посадочного на +/- 8° до расстояния, соответствующего углу места, равному  , для РМС, ГРМ I, II и III категорий. Схема маневрирования ВСЛ при определении зоны действия ГРМ в горизонтальной плоскости (ЗДгг) приведена на рисунке 7 настоящего приложения.
, для РМС, ГРМ I, II и III категорий. Схема маневрирования ВСЛ при определении зоны действия ГРМ в горизонтальной плоскости (ЗДгг) приведена на рисунке 7 настоящего приложения.
В процессе маневрирования ВСЛ измеряются текущие значения напряженности электромагнитного поля ГРМ (Ег) и дальности ВСЛ от АФУ ГРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка зоны действия ГРМ в горизонтальной плоскости (ЗДгг) в соответствии с РЭ АЛК. Запись контролируемых ИП (Егi, Дi) осуществляется в АЛК для послеполетного анализа. Величина напряженности электромагнитного поля ГРМ (Ег) составляет не менее 400 мкВ/м, и ток бленкера навигационного приемника в азимутальном секторе, равном +/- 8°, по обе стороны от осевой линии ВПП имеет удовлетворительные рабочие характеристики до расстояния 18,5 км (10 м. миль) от порога ВПП и в вертикальной плоскости до верхнего значения угла, равного  , и до нижнего значения угла, равного
, и до нижнего значения угла, равного  , над горизонтальной плоскостью либо ниже этой величины - до угла, равного
, над горизонтальной плоскостью либо ниже этой величины - до угла, равного  , если это требуется для безопасного выполнения предпосадочного маневра воздушного судна.
, если это требуется для безопасного выполнения предпосадочного маневра воздушного судна.
3.9 Проверка определенного сектора воздушного пространства в вертикальной плоскости, в пределах которого сигнал ГРМ с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия ГРМ в вертикальной плоскости) выполняется одновременно с полетами по проверке УХ ГРМ (клиренса) и использованием одного и того же профиля полета ВСЛ. Зона действия ГРМ в вертикальной плоскости (ЗДгв) определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме без снижения, на высоте 600 м, но не ниже минимальной безопасной, с курсом посадки и с курсами, отличными от посадочного на +/- 8°, с удаления от АФУ ГРМ, соответствующего углу места, равному  и завершаются после прохода ВСЛ точки пересечения угла места, равного
и завершаются после прохода ВСЛ точки пересечения угла места, равного  . Схема маневрирования ВСЛ при определении зоны действия ГРМ в вертикальной плоскости (ЗДгв) приведена на рисунке 7 настоящего приложения.
. Схема маневрирования ВСЛ при определении зоны действия ГРМ в вертикальной плоскости (ЗДгв) приведена на рисунке 7 настоящего приложения.
В процессе полета ВСЛ от угла, равного 
 , до угла, равного
, до угла, равного  , измеряются значения напряженности электромагнитного поля радиомаяка (Ег), которые составляют не менее 400 мкВ/м, и проводится анализ зоны действия ГРМ в вертикальной плоскости в соответствии с РЭ АЛК.
, измеряются значения напряженности электромагнитного поля радиомаяка (Ег), которые составляют не менее 400 мкВ/м, и проводится анализ зоны действия ГРМ в вертикальной плоскости в соответствии с РЭ АЛК.
3.10 Геометрическое место точек зоны действия ГРМ в вертикальной плоскости, содержащей ось ВПП, ближайших к земной поверхности, в которых информационный параметр глиссадного сигнала (РГМ) равен нулю (далее - угол наклона глиссады - точность юстировки глиссады  ) определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме, с последующим снижением по глиссаде и дальнейшим уходом на второй круг. Схема маневрирования ВСЛ при определении угла наклона глиссады приведена на рисунке 8 настоящего приложения.
) определяется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме, с последующим снижением по глиссаде и дальнейшим уходом на второй круг. Схема маневрирования ВСЛ при определении угла наклона глиссады приведена на рисунке 8 настоящего приложения.
наклона глиссады, чувствительности к смещению от линии
глиссады, измерение амплитуды искривления линии глиссады
и определении высоты опорной точки
Проверка угла наклона глиссады снижения (проверка точности юстировки глиссады  ) выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений. При этой проверке одновременно определяется смещение линии глиссады относительно усредненной глиссады такой амплитуды и частоты, которое может отслеживаться воздушным судном, выполняющим заход на посадку по приборам (далее - амплитуда искривлений линии глиссады-
) выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений. При этой проверке одновременно определяется смещение линии глиссады относительно усредненной глиссады такой амплитуды и частоты, которое может отслеживаться воздушным судном, выполняющим заход на посадку по приборам (далее - амплитуда искривлений линии глиссады- -структура глиссады) и вычисляется высота опорной точки РМС ("T").
-структура глиссады) и вычисляется высота опорной точки РМС ("T").
Измерения амплитуды искривлений линии глиссады выполняются с выхода ВСЛ на посадочную прямую с дальности (12 - 15 км) от АФУ ГРМ, на которой обеспечивается устойчивая информация от системы траекторных измерений и завершаются над точкой "C" для РМС, ГРМ I категории и порогом ВПП для РМС, ГРМ II и III категорий. Угол наклона глиссады определяется на участке от точки "A" до точки "B" для РМС, ГРМ I, II и III категорий. В процессе маневрирования ВСЛ измеряются текущие значения ИП ГРМ (РГМi), угловые координаты траектории полета ВСЛ по глиссаде  и дальности (Дi - при наличии соответствующей аппаратуры), по которым определяется угол наклона глиссады
и дальности (Дi - при наличии соответствующей аппаратуры), по которым определяется угол наклона глиссады  , пределы установки (допуски на юстировку) среднего угла глиссады относительно номинального угла
, пределы установки (допуски на юстировку) среднего угла глиссады относительно номинального угла  , выполняется построение залегания линии глиссады, вычисляется амплитуда искривлений линии глиссады
, выполняется построение залегания линии глиссады, вычисляется амплитуда искривлений линии глиссады  и определяется высота опорной точки РМС ("T"). Запись контролируемых ИП (РГМi,
и определяется высота опорной точки РМС ("T"). Запись контролируемых ИП (РГМi,  , Дi) осуществляется в АЛК для послеполетного анализа.
, Дi) осуществляется в АЛК для послеполетного анализа.
По полученным результатам вычисляются и документируются:
точность юстировки глиссады;
амплитуда искривлений линии глиссады;
высота опорной точки РМС ("T").
При вводе ГРМ в эксплуатацию угол наклона глиссады  устанавливается как можно ближе к номинальному
устанавливается как можно ближе к номинальному  для данного направления посадки углу снижения (в соответствии с аэронавигационным паспортом аэродрома). При периодических летных проверках угол наклона глиссады
для данного направления посадки углу снижения (в соответствии с аэронавигационным паспортом аэродрома). При периодических летных проверках угол наклона глиссады  поддерживается в пределах следующих допусков от номинального угла
поддерживается в пределах следующих допусков от номинального угла  :
:
 - для РМС, ГРМ I и II категорий;
- для РМС, ГРМ I и II категорий; - для РМС, ГРМ III категории.
- для РМС, ГРМ III категории.Допуски на величину амплитуды искривлений линии глиссады РМС ( - структура глиссады) составляют:
- структура глиссады) составляют:
на участке не менее 12 - 15 км от АФУ ГРМ до точки до точки "C" +/- 0,035 РГМ (+/- 50,0 мкА) - для ГРМ I категории;
на участке не менее 12 - 15 км от АФУ ГРМ до точки "A" +/- 0,035 РГМ (+/- 50,0 мкА) - для ГРМ II и III категорий;
от точки "A" до точки "B" - линейное уменьшение до +/- 0,023 РГМ (+/- 30,0 мкА) - для ГРМ II и III категорий;
от точки "B" до опорной точки "T" - не более +/- 0,023 РГМ (+/- 30,0 мкА) - для ГРМ II и III категорий.
Вычисление высоты опорной точки РМС ("T") проводится по полученным результатам ИП ГРМ (РГМi), угла отклонения ВСЛ от траектории глиссады  и дальности до АФУ ГРМ (Дi) на участках:
и дальности до АФУ ГРМ (Дi) на участках:
от точки "A" до точки "B" - расчетная высота опорной точки ("T") для ГРМ I категории;
от дальности 1830 м от порога ВПП со стороны захода на посадку до удаления 300 м от порога ВПП - фактическая высота опорной точки ("T") для ГРМ II и III категорий.
Для определения высоты опорной точки РМС ("T") над порогом ВПП среднее положение угла наклона глиссады  между точками "A" и "B" на траектории снижения РМС представляется в виде прямой (при этом предполагается, что геометрическое место точек глиссады в вертикальной плоскости, содержащей осевую линию ВПП, является совершенной гиперболой и продолжение глиссады является асимптотой к этой гиперболе) и измеряется между этой прямой линией и ее проекцией по вертикали на горизонтальную плоскость. Влияние усредненных значений отклонений глиссады в районе между точкой "B" и порогом ВПП приводит к проецированию опорной точки ("T"), которая отличается от рассчитанной на участке от точки "A" до точки "B". Фактическая опорная точка определяется только в процессе летной проверки, и ее значение отражается в материалах отчета по летной проверке. Расчет фактической высоты опорной точки проводится по измеренным значениям ИП ГРМ (РГМi,
между точками "A" и "B" на траектории снижения РМС представляется в виде прямой (при этом предполагается, что геометрическое место точек глиссады в вертикальной плоскости, содержащей осевую линию ВПП, является совершенной гиперболой и продолжение глиссады является асимптотой к этой гиперболе) и измеряется между этой прямой линией и ее проекцией по вертикали на горизонтальную плоскость. Влияние усредненных значений отклонений глиссады в районе между точкой "B" и порогом ВПП приводит к проецированию опорной точки ("T"), которая отличается от рассчитанной на участке от точки "A" до точки "B". Фактическая опорная точка определяется только в процессе летной проверки, и ее значение отражается в материалах отчета по летной проверке. Расчет фактической высоты опорной точки проводится по измеренным значениям ИП ГРМ (РГМi,  , Дi) на участке глиссады, расположенном между точками 1830 м (6000 фут) и 300 м (1000 фут) от порога ВПП. Этот участок глиссады снижения (1830 - 300 м) представляется в виде прямой, продолженной до точки приземления.
, Дi) на участке глиссады, расположенном между точками 1830 м (6000 фут) и 300 м (1000 фут) от порога ВПП. Этот участок глиссады снижения (1830 - 300 м) представляется в виде прямой, продолженной до точки приземления.
Высота опорной точки РМС ("T") проверяется только при вводе РМС в эксплуатацию и/или при присвоении категории радиомаячной системе инструментального захода ВС на посадку, и величина ее составляет:
15,0 м + 3,0 м (50,0 фут + 10,0 фут) - для РМС, ГРМ I, II и III категорий;
12,0 м + 6,0 м (40,0 фут + 20,0 фут) - для РМС, ГРМ I категории, установленных на коротких ВПП (по классификации ИКАО, код 1, 2 - длина ВПП 1200 м и менее).
3.11 Проверка отношения измеренной РГМ к соответствующему угловому смещению относительно соответствующей опорной линии (далее - чувствительность к угловому смещению (Sг) от линии глиссады - крутизна характеристики ГРМ) осуществляется на основе измерений на посадочной прямой при полете ВСЛ по верхней (нижней) границе полусектора глиссады от точки "A" до точки "B" на траектории снижения для ГРМ I, II и III категорий. Схема маневрирования ВСЛ при определении чувствительности к смещению от линии глиссады приведена на рисунке 8 настоящего приложения.
В процессе маневрирования ВСЛ измеряются текущие значения ИП ГРМ (РГМпсг в(н)i), угла отклонения ВСЛ от границы верхней (нижней) части полусектора глиссады  и дальности до АФУ ГРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики ГРМ. Запись контролируемых ИП ГРМ (РГМпсг в(н)i,
и дальности до АФУ ГРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики ГРМ. Запись контролируемых ИП ГРМ (РГМпсг в(н)i,  , Дi) осуществляется в АЛК для послеполетного анализа.
, Дi) осуществляется в АЛК для послеполетного анализа.
и дальности до АФУ ГРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики ГРМ. Запись контролируемых ИП ГРМ (РГМпсг в(н)i, По полученным результатам вычисляются и документируются:
величина верхней (нижней) части полусектора глиссады  , мин;
, мин;
, мин;значение чувствительности к смещению от линии глиссады (Sг) и ее отклонение  от номинального значения в процентах по формулам:
от номинального значения в процентах по формулам:
 или
или 

где коэффициент K = 125 - величина тока компенсации при полете ВСЛ по границам полусектора глиссады сверху (снизу), мкА;
Величину верхней (нижней) части полусектора глиссады рекомендуется устанавливать равной  . Размеры верхней
. Размеры верхней  и нижней
и нижней  частей полусектора глиссады по возможности устанавливаются как можно симметричнее. Отклонение ИП ГРМ
частей полусектора глиссады по возможности устанавливаются как можно симметричнее. Отклонение ИП ГРМ  , который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВСЛ от линии глиссады (крутизна характеристики выходного сигнала канала глиссады) от установленного (номинального) значения выше (ниже) от линии глиссады, составляет не более:
, который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВСЛ от линии глиссады (крутизна характеристики выходного сигнала канала глиссады) от установленного (номинального) значения выше (ниже) от линии глиссады, составляет не более:
25,0% - для РМС, ГРМ I категории;
20,0% - для РМС, ГРМ II категории;
15,0% - для РМС, ГРМ III категории.
3.12 Проверка влияния широкого канала на положение угла наклона глиссады проводится для двухчастотного ГРМ, только при вводе РМС в эксплуатацию. Оценка влияния широкого канала на положение средней линии глиссады осуществляется при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме с дальности 10 - 12 км от АФУ ГРМ, с последующим снижением по глиссаде и с дальнейшим уходом на второй круг. На ГРМ отключается сигнал широкого канала в соответствии с руководством по эксплуатации данного типа РМС. Проверка параметров и характеристик ГРМ при отключенном широком канале проводится в соответствии с методикой, приведенной в пункте 3.10. В процессе маневрирования ВСЛ измеряются текущие значения ИП ГРМ (РГМi), угловые координаты траектории полета ВСЛ по глиссаде  и дальности (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии глиссады
и дальности (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии глиссады  при отключенном широком канале ГРМ.
при отключенном широком канале ГРМ.
По полученным результатам вычисляется и документируется величина угла наклона глиссады при отключенном широком канале радиомаяка  , которая сравнивается с величиной угла наклона глиссады
, которая сравнивается с величиной угла наклона глиссады  , измеренной при выполнении заходов ВСЛ по линии глиссады при нормальном функционировании радиомаяка, по формуле:
, измеренной при выполнении заходов ВСЛ по линии глиссады при нормальном функционировании радиомаяка, по формуле:

где  - разность положения среднего угла наклона глиссады при нормальном функционировании ГРМ и отключенном широком канале радиомаяка, мин;
- разность положения среднего угла наклона глиссады при нормальном функционировании ГРМ и отключенном широком канале радиомаяка, мин;
Разность положения среднего угла наклона глиссады при нормальном функционировании ГРМ и отключенном широком канале радиомаяка  составляет не более +/- 12' (+/- 0,2°).
составляет не более +/- 12' (+/- 0,2°).
3.13 Проверка работы системы автоматического контроля ГРМ (далее - САК ГРМ) проводится с использованием методов, рекомендуемых в руководстве по эксплуатации на данный тип РМС:
а) проверка САК ГРМ при смещении угла наклона глиссады осуществляется при полете ВСЛ по глиссаде и осевой линии ВПП в соответствии с методикой, приведенной в пункте 3.10. Для того, чтобы при отклонении угла глиссады  от номинального значения за пределы установленных допусков (
от номинального значения за пределы установленных допусков ( : ГРМ - I, II и III категорий в пределах
: ГРМ - I, II и III категорий в пределах  (7,5%) от номинального угла) подавался сигнал "аварии", ИТП РМС настраивает оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение линии глиссады выше и ниже от номинального угла глиссады -
(7,5%) от номинального угла) подавался сигнал "аварии", ИТП РМС настраивает оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение линии глиссады выше и ниже от номинального угла глиссады -  ) эта настройка вызывала срабатывание аварийной сигнализации устройства контроля положения (юстировки) линии глиссады ("авария по
) эта настройка вызывала срабатывание аварийной сигнализации устройства контроля положения (юстировки) линии глиссады ("авария по  "). Точное значение смещения линии глиссады выше
"). Точное значение смещения линии глиссады выше  и ниже
и ниже  от номинального угла глиссады
от номинального угла глиссады  при правильной настройке САК ГРМ I и II и III категорий, при котором срабатывает сигнал "аварии", определяется по формуле:
при правильной настройке САК ГРМ I и II и III категорий, при котором срабатывает сигнал "аварии", определяется по формуле:
(7,5%) от номинального угла) подавался сигнал "аварии", ИТП РМС настраивает оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение линии глиссады выше и ниже от номинального угла глиссады - 
где  - величина угла глиссады, при которой срабатывает сигнал "аварии" при смещении линии глиссады выше (ниже) от номинального значения, мин;
- величина угла глиссады, при которой срабатывает сигнал "аварии" при смещении линии глиссады выше (ниже) от номинального значения, мин;
б) проверку САК ГРМ при увеличении (уменьшении) чувствительности к смещению от линии глиссады (при изменении крутизны характеристики ГРМ) целесообразно проводить после проверки чувствительности к смещению по методике, приведенной в пункте 3.11. При этой проверке наземный ИТП радиомаяка настраивает чувствительность к смещению от линии глиссады на широкие (расширение полусектора глиссады - уменьшение чувствительности) и узкие (сужение полусектора глиссады - увеличение чувствительности) пределы срабатывания сигналов "аварии" и производится проверка чувствительности к смещению от линии глиссады в каждом из этих случаев до момента срабатывания системы автоматического контроля ("авария по крутизне"),
в) проверка САК ГРМ при уменьшении мощности излучения радиомаяка проводится только при вводе ГРМ в эксплуатацию. Напряженность поля, создаваемого сигналом ГРМ (Ег), измеряется на максимальном расстоянии, предусмотренном зоной его действия, при этом мощность радиомаяка снижается до уровня срабатывания сигнала "аварии". В процессе маневрирования ВСЛ измеряется зона действия ГРМ в горизонтальной плоскости при мощности радиомаяка, составляющей 80% от номинального значения для двухчастотного радиомаяка и 50% от номинального значения для одночастотного ГРМ в соответствии с методикой, приведенной в пункте 3.8. Величина напряженности поля ГРМ (Ег) при пониженной мощности излучения составляет не менее 400 мкВ/м, а предел срабатывания контрольного устройства регулируется таким образом, чтобы сигнал "аварии" срабатывал при этом уровне. Кроме того, при выполнении этой проверки проводятся измерение и оценка амплитуды искривлений линии глиссады  в соответствии с методикой, приведенной в пункте 3.10.
в соответствии с методикой, приведенной в пункте 3.10.
Летная проверка РМД-НП
4. Общие положения при выполнении летной проверки РМД-НП.
4.1 Перечень параметров, рекомендуемых к проверке при вводной ЛП РМД-НП, приведен в таблице N 9.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД РМД-НП | Первый комплект проверяется под углами: 0°, -35° (или 0, +35°); второй - 0°, +35° (или 0°, -35°) соответственно. При использовании РМД-НП с одночастотным КРМ РМС, ЗД РМД-НП проверяется под углами 0°, +/- 10° |
2. | Ошибка информации о дальности | |
3. | Опознавание | Правильное, четкое, правильно синхронизированное |
4.2 Перечень параметров, рекомендуемых к проверке при годовой периодической ЛП РМД-НП, приведен в таблице N 10.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД РМД-НП под углом 0° к осевой линии ВПП | |
2. | Ошибка информации о дальности | |
3. | Опознавание | Правильное, четкое, правильно синхронизированное |
4.3 Перечень параметров, рекомендуемых к проверке при полугодовой периодической ЛП РМД-НП, приведен в таблице N 11.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Ошибка информации о дальности |
4.4 Значения параметров РМД-НП приведены в таблице N 12.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров |
1. | ЗД радиомаяка, не менее: | [км] | Соответствие ЗД КРМ |
2. | Ошибка информации о дальности (для вероятности 0,95), не более | [м] | +/- 75 |
3. | Опознавание | ОС | Правильность присвоенного кода, синхронизации с КРМ. Ясная слышимость в ЗД радиомаяка |
4.5 Летная проверка РМД-НП выполняется ВСЛ. Для оценки ошибки информации о дальности, получаемой от проверяемого РМД-НП, аппаратура летного контроля обеспечивает определение точной наклонной дальности от ВСЛ до РМД-НП.
Основной режим определения точной наклонной дальности от ВСЛ до РМД-НП на основе информации, получаемой от глобальных навигационных спутниковых систем.
В случае если в месте установки радиомаяка сигналы ГНСС АЛК ВСЛ не принимаются, точная наклонная дальность от ВСЛ до РМД-НП определяется с использованием блока эталонного дальномера.
Блок эталонного дальномера размещается в непосредственной близости от РМД-НП, в соответствии с руководством по эксплуатации АЛК ВСЛ.
Методика летной проверки РМД-НП не отличается в зависимости от применяемого оборудования определения точной наклонной дальности от ВСЛ до РМД-НП.
4.6 Ошибка навигационной информации о наклонной дальности на борту ВС и зона действия дальномерного навигационно-посадочного радиомаяка РМД-НП определяются при маневрировании ВСЛ по стандартной схеме захода на посадку на данном аэродроме, с использованием точной информации о маневрировании ВСЛ на траектории измерений, в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов). Проверку рекомендуется проводить в комплексе с проверкой зоны действия курсового радиомаяка РМС в соответствии с пунктами 2.7 и 2.8.
При автономном вводе РМД-НП в эксплуатацию зона действия радиомаяка определяется при маневрировании ВСЛ под углами 0°, +35°, -35° к осевой линии ВПП с дальности не менее 50 км. Проверка зоны действия РМД-НП при автономных периодических проверках осуществляется при маневрировании ВСЛ под углом 0° к посадочному курсу с дальности не менее 50 км.
В процессе проверки определяются:
удаления, на которых показания дальности до порога ВПП на соответствующих приборах становятся устойчивыми;
удаления, на которых показания дальности по мере приближения к порогу ВПП на соответствующих приборах становятся неустойчивыми;
точность информации о дальности до порога ВПП в момент прохода ВСЛ характерных точек на траектории снижения (ДПРМ, БПРМ, ВнМРМ, порога ВПП).
Зона действия дальномерного радиомаяка РМД-НП составляет:
по дальности не менее 50 км (27 м. миль) на высоте 600 м (2000 фут);
в горизонтальной плоскости (по азимуту) круговая или секторная +/- 35° относительно оси ВПП;
в вертикальной плоскости (угол места) от 0 до 20°.
Погрешность, вносимая радиомаяком в измерение дальности до порога ВПП, не более +/- 75,0 м (+/- 0,5 мкс).
Летная проверка МРМ
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
7. Общие положения при выполнении летной проверки МРМ.
7.1 Перечень параметров, рекомендуемых к проверке при ЛП и годовой периодической ЛП МРМ, приведен в таблице N 13.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД МРМ: а) при полетах по ЛК и ЛГ; б) напряженность поля МРМ (Ем) | Проверяются при вводной и годовой ЛП МРМ |
2. | Непрерывность манипуляции сигнала МРМ |
7.2 При полугодовой периодической ЛП МРМ проверяется только непрерывность манипуляции сигнала МРМ.
7.3 Значения параметров МРМ приведены в таблице N 14.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров |
1. | ЗД МРМ на ЛК и ЛГ: | ||
а) ДМРМ | [м] | 600 +/- 200 | |
б) Б(С)МРМ | [м] | 300 +/- 100 | |
в) ВМРМ | [м] | 150 +/- 50 | |
2. | Ем: | ||
а) на границах ЗД МРМ, не менее | [мкВ/м] | 1500 | |
б) в ЗД МРМ должна достигать, не менее | [мкВ/м] | 3000 | |
3. | Непрерывность манипуляции сигнала МРМ в ЗД МРМ | ОС | Непрерывная последовательность манипулированного сигнала |
7.4 Летная проверка МРМ выполняется ВСЛ. Для оценки параметров и характеристик проверяемого МРМ аппаратура летного контроля обеспечивает построение опорной траектории движения ВСЛ.
Порядок применяемого оборудования для построения опорной траектории движения ВСЛ описан в пункте 3.5.
7.5 Проверка определенной области воздушного пространства, в пределах которой сигнал аэродромного (дополнительного) маркерного радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия МРМ), выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений, определяется путем прохода ВСЛ над дальним (ближним, внутренним, дополнительным) МРМ по стандартной схеме захода на посадку на данном аэродроме по траектории снижения (линии курса и глиссады), дальнейшим уходом на второй круг и измерением напряженности электромагнитного поля радиомаяка (Eм) на границах и внутри зоны действия МРМ, а также измерением времени, в течение которого обеспечивается визуальная индикация и звуковая сигнализация радиомаяка.
Для МРМ, входящих в состав РМС инструментального захода ВС на посадку, измерения выполняются на посадочной прямой, с удаления 10 км от порога ВПП и завершаются после прохода ВСЛ ближнего МРМ (внутреннего МРМ).
Для аэродромных дополнительных маркерных радиомаяков (АДМРМ) полеты ВСЛ выполняются в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов). Измерения выполняются с дальности не менее 2 км от места установки АДМРМ и завершаются через 5 - 6 секунд после его прохода.
Перекрытие зон действия дальнего и дополнительного МРМ на высотах их использования не допускается.
В процессе полета ВСЛ измеряются значения напряженности электромагнитного поля радиомаяка (Ем) на границах и в зоне действия МРМ, текущие значения дальности от порога ВПП (Дi - при наличии соответствующей аппаратуры), момент превышения уровней сигнала 1,5 мВ/м и 3,0 м В/м и время отсутствия манипулированного сигнала МРМ (провалы в диаграмме направленности радиомаяка).
Одновременно с проверкой зоны действия МРМ оценивается непрерывность манипулированного сигнала радиомаяка. Оценка манипуляции производится по визуальной и звуковой сигнализации и считается удовлетворительной, когда кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами:
ВнМРМ/IМ - непрерывная передача 6 точек в секунду;
БМРМ/ММ - непрерывная передача чередующихся точек и тире, причем тире передаются со скоростью 2 тире в секунду, а точки - со скоростью 6 точек в секунду. При отсутствии внутреннего МРМ допускается непрерывная передача 6 точек в секунду;
ДМРМ/ОМ - непрерывная передача 2 тире в секунду.
В процессе проверки напряженности электромагнитного поля МРМ зона действия составляет:
ДМРМ/ОМ - 600 м +/- 200 м (2000 фут +/- 650 фут);
БМРМ/ММ - 300 м +/- 100 м (1000 фут +/- 325 фут);
ВнМРМ/IМ - 150 м +/- 50 м (500 фут +/- 160 фут);
АДМРМ - величина зоны действия зависит от высоты полета ВС  .
.
.ЛЕТНАЯ ПРОВЕРКА АЗИМУТАЛЬНО-ДАЛЬНОМЕРНЫХ РАДИОМАЯКОВ
БЛИЖНЕЙ НАВИГАЦИИ
1. Летную проверку РМА рекомендуется выполнять при маневрировании ВСЛ по орбите и по воздушным трассам.
При полетах ВСЛ по орбите проверяется ошибка навигационной информации об азимуте/пеленге, а также вычисляется величина амплитуды искривлений курсовой линии.
При полетах ВСЛ по воздушным трассам выполняется проверка зоны действия РМА в вертикальной и горизонтальной плоскостях, выполняется оценка сигнала опознавания и непрерывность навигационной информации, а также определяется точность юстировки и вычисляется величина амплитуды искривлений курсовой линии, в том числе отклонения типа неровностей и зубчатости.
При отсутствии сигналов ГНСС проверяются:
при полетах ВСЛ по орбите ошибка навигационной информации об азимуте/пеленге, величина амплитуды искривлений курсовой линии;
при полетах ВСЛ по воздушным трассам зоны действия РМА в вертикальной и горизонтальной плоскостях, выполняется оценка сигнала опознавания.
Вводная летная проверка выполняется для двух (первого и второго) комплектов оборудования. Периодическая летная проверка выполняется для одного комплекта оборудования.
1.1 Перечень параметров, рекомендуемых к проверке при вводной ЛП РМА, приведен в таблице N 1.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД РМА в горизонтальной плоскости (ЗДАГ) | |
2. | Напряженность поля (ЕРМА) в ЗД | |
3. | ЗД РМА в вертикальной плоскости (ЗДАВ) (Rнз = 1,2Hп) | |
4. | Ошибка информации о пеленге при полете по орбите: - средняя ошибка пеленга - изгибы искривлений пеленга | |
5. | Ошибка информации о пеленге при полете по воздушной трассе: - средняя ошибка пеленга - изгибы искривлений пеленга - зубчатость - ошибка пеленгования с учетом искривления  | Летная проверка выполняется не менее чем по двум воздушным трассам. Параметры проверяются только при наличии сигналов ГНСС |
6. | Ошибка информации о пеленге в контрольной точке | |
7. | Вертикальная составляющая поля РМА (ВСП) | |
8. | Опознавание | Наличие и разборчивость сигнала |
1.2 Перечень параметров, рекомендуемых к проверке при годовой ЛП РМА, приведен в таблице N 2.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД РМА в горизонтальной плоскости (ЗДАГ) | |
2. | Напряженность поля (ЕРМА) в ЗД | |
3. | ЗД РМА в вертикальной плоскости (ЗДАВ) (Rнз = 1,2Hп) | |
4. | Ошибка информации о пеленге при полете по орбите: - средняя ошибка пеленга - изгибы искривлений пеленга | |
5. | Ошибка информации о пеленге при полете по воздушной трассе: - средняя ошибка пеленга - изгибы искривлений пеленга - зубчатость - ошибка пеленгования с учетом искривления  | Летная проверка выполняется по одной воздушной трассе. Параметры проверяются только при наличии сигналов ГНСС |
6. | Опознавание | Наличие и разборчивость сигнала |
1.3 Перечень параметров, рекомендуемых к проверке при вводной и периодической летной проверке посадочных радиалов РМА, приведен в таблице N 3.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Ошибка информации о пеленге при полете по посадочному радиалу (  ) ) | Вводная летная проверка выполняется для двух (первого и второго) комплектов оборудования. Периодическая летная проверка выполняется для одного комплекта оборудования |
1.4 Рекомендуемые параметры РМА приведены в таблице N 4.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров | ||||
1. | ЗД азимутального радиомаяка: | ||||||
а) в горизонтальной плоскости | [км] | в соответствии с ЭД | |||||
б) в вертикальной плоскости, не менее | [градус] | 40 | |||||
в) ЕРМА, не менее | [мкВ/м] | 90 | |||||
2. | Ошибка информации о пеленге: | ||||||
а) | [градус] | +/- 2,0 | |||||
б) | [градус] | 3,5 | |||||
в) | [градус] | 3,0 | |||||
г)  , не более , не более | [градус] | +/- 3,5 | |||||
д) | [градус] | +/- 2,0 | |||||
| |||||||
4. | ВСП азимутального радиомаяка для крена ВСЛ +/- 20°, не более | [градус] | +/- 2,0 | ||||
5. | Опознавание | ОС | Слово из 2 ... 3 букв, интервал 30 +/- 3 с | ||||
1.5 Летную проверку РМА рекомендуется выполнять ВСЛ. Для оценки параметров и характеристик РМА аппаратура летного контроля обеспечивает построение опорной траектории движения ВСЛ.
Основной режим построения опорной траектории АЛК ВСЛ на основе информации, получаемой от глобальных навигационных спутниковых систем.
В случае если в месте установки радиомаяка сигналы ГНСС АЛК ВСЛ не принимаются, опорная траектория строится с использованием оптической системы траекторных измерений "Минилир-АТ".
Требования к размещению оптической системы траекторных измерений изложены в руководстве по эксплуатации АЛК ВСЛ.
1.6 Проверка пригодной для эксплуатационного использования области обслуживаемого воздушного пространства, где РМА излучает сигналы, которые обеспечивают удовлетворительную работу бортового оборудования на эшелонах и расстояниях до угла места, равного 40° (далее - зона действия (ЗД) радиомаяка в горизонтальной и вертикальной плоскостях), осуществляется при полетах ВСЛ по воздушным трассам на высоте 5800 - 6400 м (19000 - 21000 фут), в направлениях "ОТ" радиомаяка до удалений в соответствии с ЭД и "НА" радиомаяк с постоянной скоростью и точным проходом ВСЛ над радиомаяком.
Оценка сигнала опознавания и непрерывность получения навигационной информации проводится одновременно с проверкой зоны действия радиомаяка.
Измерения проводятся при маневрировании ВСЛ:
"ОТ" радиомаяка с удаления 6 - 7 км (3,5 м. мили) от АФУ радиомаяка до удаления в соответствии с ЭД;
"НА" радиомаяк с удаления в соответствии с ЭД с точным проходом над АФУ РМА до удаления, равного 1,5 Н полета.
В процессе проверки измеряются текущие значения пеленга (Пi), по которым оценивается непрерывность навигационной информации и текущие значения напряженности электромагнитного поля (Еi), по которым оценивается зона действия РМА в горизонтальной и вертикальной плоскостях.
Дальность действия оценивается по уровню сигнала 90,0 мкВ/м для РМА или по появлению (исчезновению) сигнала готовности азимута для РСБН.
В процессе полета на борту ВСЛ прослушивается кодированный сигнал опознавания, оценивается правильность присвоенного кода и качество слышимости. Опознавание считается удовлетворительным, если кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
1.7 Ошибка навигационной информации о пеленге (Пi) радиомаяка на борту ВСЛ определяется при маневрировании ВСЛ по орбите и по воздушным трассам:
Пилотирование ВСЛ осуществляется в диапазоне высот 2700 - 3400 м (9000 - 11000 фут), но не ниже минимальной безопасной высоты вначале с левым (правым), затем с правым (левым) креном ВСЛ.
Полеты выполняются - по орбите радиусом 30 км (16 м. миль).
При отсутствии сигналов ГНСС и применении оптической системы траекторных измерений, полеты выполняются по орбите на высоте 700 - 1200 м (2300 - 4000 фут), но не ниже минимальной безопасной высоты и радиусом 10 - 15 км (5 - 8 м. миль)
Средняя ошибка пеленга  включает систематическую (среднее значение ошибки) и случайную (два СКО) составляющие ошибки информации о пеленге и вычисляется по формуле:
включает систематическую (среднее значение ошибки) и случайную (два СКО) составляющие ошибки информации о пеленге и вычисляется по формуле:

где  - среднее значение ошибки измерения пеленга, градус;
- среднее значение ошибки измерения пеленга, градус;
Систематическая составляющая ошибки информации о пеленге  вычисляется по формуле:
вычисляется по формуле:

где  - ошибка i-го измерения пеленга;
- ошибка i-го измерения пеленга;
N - количество измерений.
Случайная составляющая ошибки информации о пеленге  вычисляется по формуле:
вычисляется по формуле:

где  - среднее значение ошибки измерения пеленга, градус;
- среднее значение ошибки измерения пеленга, градус;
N - количество измерений.
Изгибы искривлений пеленга рассчитываются на основании информации об  в соответствии с РЭ АЛК.
в соответствии с РЭ АЛК.
1.7.2 Ошибки информации об азимуте/пеленге, при полетах ВСЛ по воздушным трассам (при наличии сигналов ГНСС), определяются совместно с проверкой зоны действия РМА (пункт 1.6).
Измерения проводятся при наличии навигационной информации об азимуте/пеленге на борту ВСЛ и завершаются по уровню сигнала менее 90,0 мкВ/м.
В процессе полета измеряются текущие значения пеленга (Пi), а также пеленг с использованием АЛК (Палк i) и вычисляется ошибка определения  с учетом систематической и случайной составляющих ошибки, как и при полетах по орбите (пункт 1.7.1).
с учетом систематической и случайной составляющих ошибки, как и при полетах по орбите (пункт 1.7.1).
1.8 Ошибка информации о пеленге в опорной контрольной точке РМА определяется только при вводе радиомаяка в эксплуатацию. Выбор опорной контрольной точки производится перед проведением летной проверки и выполняется совместно ИО АЛК (штурманом ВСЛ), штурманской службой аэродрома/аэроузла и ИТП организации, на эксплуатации которой находится данный радиомаяк.
Контрольная точка выбирается на радиале установки антенны контрольного устройства или достаточно близко к нему (обычно 90° или 270°) и на расстоянии 18,5 - 37,0 км (10,0 - 20,0 м. миль) от АФУ радиомаяка. При этом контрольная точка (мост, перекресток дорог, церковь и т.п.) хорошо просматривается с высоты полета ВСЛ, равной 460 - 1000 м (1500 - 3000 фут), азимут/пеленг ее рассчитан с точностью до десятых долей градуса, указано расстояние от РМА и рекомендована высота прохода ВСЛ над ней относительно АФУ радиомаяка.
Пилотирование осуществляется по выбранному радиалу в направлении "НА" и "ОТ" радиомаяка на высоте полета 460 - 1000 м (1500 - 3000 фут), но не ниже минимальной безопасной высоты, с проходом ВСЛ точно над опорной контрольной точкой.
В момент прохода ВСЛ над опорной контрольной точкой измеряется пеленг РМА и рассчитывается среднее значение ошибки пеленга, которое составляет не более +/- 2°.
Описание контрольной точки прикладывается к акту летной проверки.
1.9 Проверка отклонения линии курса в результате наличия нежелательных вертикально-поляризованных составляющих сигналов РМА на качество пилотирования ВС (далее - ВСП) выполняется только при вводе РМА в эксплуатацию.
Маневрирование ВСЛ осуществляется по радиалу в направлении "НА" либо "ОТ" радиомаяка с 30,0 км (16,0 м. миль) от АФУ РМА на высоте 1200 - 1900 м (4000 - 6000 фут), но не ниже минимальной безопасной высоты, при этом ввод ВСЛ в крен +/- 20° и возврат его в исходное положение - нулевого крена выполняется за время не более 5 секунд.
Периодические крены ВСЛ на +/- 20° относительно продольной оси самолета выполняются вначале в одну сторону с креном, равным +20°, и с последующим возвращением к прямолинейному горизонтальному полету, а затем с креном, равным -20°, в противоположную сторону, и этот маневр необходимо повторить не менее 20 раз в каждую сторону. В процессе указанных эволюций ВСЛ отклонения курса и линии пути от заданных значений поддерживаются минимальными (указатель индикатора курсовых отклонений в центре шкалы).
При выполнении этих полетов вычисляется вертикальная составляющая поляризации РМА.
1.10 Радиалы, которые используются или намечаются для использования при заходе ВС на посадку, подвергаются летной проверке с целью определения их пригодности для выполнения ВС предпосадочного маневра с использованием навигационной информации от РМА.
Пилотирование ВСЛ осуществляется по стандартной схеме захода на посадку на данном аэродроме с использованием сигналов РМА по посадочному радиалу в направлении "НА" радиомаяк и выходом в точку начала измерений на дальности 12 - 18 км от АФУ РМА, последующим снижением и уходом на второй круг.
Полет ВСЛ выполняется по посадочному радиалу с точным выдерживанием указателя индикатора курсовых отклонений в центре шкалы навигационного прибора. В процессе полета измеряются текущие значения пеленга (Пi) а также пеленг с использованием АЛК (Палк i) и вычисляется ошибка определения  с учетом систематической и случайной составляющих ошибки.
с учетом систематической и случайной составляющих ошибки.
На протяжении всего захода ВСЛ по посадочному радиалу пропадания сигналов РМА недопустимы.
В акте летной проверки отмечается, что радиомаяк РМА пригоден для использования в качестве средства неточного захода ВС на посадку с указанием конкретной высоты снижения.
Периодичность летных проверок РМА, используемых для неточного захода ВС на посадку, соответствует периодичности летных проверок радиомаяков РМА и проводится в комплексе с проверкой азимутального радиомаяка.
2. Летная проверка дальномерного радиомаяка (далее - РМД) выполняется при маневрировании ВСЛ по воздушным трассам.
При полетах ВСЛ по воздушным трассам выполняется проверка зоны действия РМД в горизонтальной плоскости, выполняется оценка сигнала опознавания и непрерывность навигационной информации, а также определяется точность информации о дальности.
Вводная летная проверка выполняется для первого и второго комплектов оборудования не менее чем по двум воздушным трассам. Периодическая летная проверка выполняется для одного комплекта оборудования не менее чем по одной воздушной трассе.
При отсутствии сигналов ГНСС допускается оценить ошибку информации о дальности при полетах над наземными контрольными ориентирами или с использованием блока эталонного дальномера.
2.1 Перечень параметров, рекомендуемых к проверке при вводной и периодической ЛП РМД, приведен в таблице N 5.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД РМД | При размещении на одной позиции с РМА проверка совмещается с проверкой ЗД РМА |
2. | Ошибка информации о дальности при полете по воздушной трассе | |
3. | Опознавание |
2.2 Рекомендуемые параметры РМД приведены в таблице N 6.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров |
1. | Зона действия: | ||
а) в горизонтальной плоскости | [км] | в соответствии с ЭД, при взаимодействии с РМА не менее зоны действия РМА | |
б) в вертикальной плоскости, не менее | [градус] | 40° | |
2. | Ошибка информации о дальности (для вероятности 0,95), не более | [м] | +/- 150 |
3. | Опознавание | ОС | Правильность присвоенного кода, ясная слышимость в зоне действия радиомаяка |
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
2.2 Пилотирование ВСЛ для проверки зона действия РМД выполняется аналогично, как и при проверке зоны действия РМА, изложенной в пункте 1.6.
В процессе проверки измеряются текущие значения наклонной дальности (Дi), по которым оценивается непрерывность навигационной информации. Дальность действия РМД оценивается по появлению (исчезновению) сигнала готовности дальности для РМД.
В процессе полета на борту ВСЛ прослушивается кодированный сигнал опознавания, оценивается правильность присвоенного кода и качество слышимости. Опознавание считается удовлетворительным, если кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
2.3 При полетах ВСЛ по воздушным трассам определяется ошибка информации о дальности  .
.
Измерения проводятся при наличии навигационной информации о дальности на борту ВСЛ и завершаются при исчезновении этой информации либо при пересечении зоны действия РМД. В процессе полета измеряются текущие значения дальности (Дi) РМД, а также дальность от РМД с использованием точной системы измерений АЛК (Далк i). На основании (Дi, Далк i) вычисляются ошибки определения дальности  с учетом систематической
с учетом систематической  и случайной
и случайной  составляющих погрешности РМД.
составляющих погрешности РМД.
При невозможности выполнения проверки точностных характеристик РМД с использованием точных измерений АЛК, проверка проводится по наземным контрольным ориентирам.
Контрольные ориентиры (далее - КО) выбираются в районе воздушных трасс (коридоров) на расстоянии 10 - 50 км от АФУ радиомаяка. При этом выбираются не менее 3-х контрольных ориентиров, которые хорошо просматриваются с высоты полета ВСЛ, равной 400 - 900 м, но не ниже безопасной. Азимут/пеленг их рассчитывается с точностью до десятых долей градуса, определяется расстояние от радиомаяка до КО.
При полетах ВСЛ по контрольным ориентирам, ВСЛ выводится на выбранный КО на высоте, при которой сохраняется информация о дальности. В момент точного прохода ВСЛ над КО ИО АЛК фиксирует показания наклонной дальности (Д) проверяемого радиомаяка. Над каждым КО необходимо выполнить не менее 3 - 4 проходов.
ЛЕТНАЯ ПРОВЕРКА ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ
1. Летную проверку ЛККС рекомендуется проводить для определения (подтверждения) зоны действия ЛККС, содержания сообщений ЛККС, передаваемых на борт ВС и соответствия траектории полета на конечном участке захода на посадку.
Летная проверка проводится для каждого направления захода на посадку, которое обеспечивает проверяемая ЛККС. Вводная летная проверка выполняется для двух (первого и второго) комплектов оборудования. Периодическая летная проверка выполняется для одного комплекта оборудования.
2. Перечень параметров, рекомендуемых к проверке при вводной и периодической ЛП ЛККС, приведен в таблице N 1.
N п/п | Наименование параметра, характеристики | Примечание |
1 | ЗД ЛККС по напряженности поля: а) минимальный уровень EЛККС на дуге +/- 35° на удалении 28 км (15 м. миль) от порога ВПП; б) минимальный уровень EЛККС на высоте 600 м с удаления 39 км (21 м. миля) до 4,6 км (2,5 м. мили) от порога ВПП; в) при заходе на посадку: - минимальный уровень EЛККС; - максимальный уровень EЛККС | Вводная летная проверка выполняется для двух (первого и второго) комплектов оборудования. Периодическая летная проверка выполняется для одного комплекта оборудования |
2 | Соответствие траектории полета на конечном участке захода на посадку | Проверяется только при вводной летной проверке |
3 | Правильность сообщений, передаваемых на борт ВС: а) сообщение типа 2: - идентификатор ЛККС - показатель точности наземной подсистемы (GAD); - показатель непрерывности и целостности наземной подсистемы (GCID); - селектор данных опорной станции (RSDS); - максимальное используемое расстояние (Dmax); - локальное магнитное склонение; - широта, долгота и высота опорной точки ЛККС б) сообщение типа 4 (параметры конечных участков захода на посадку (FAS)): - тип операции; - идентификатор поставщика обслуживания SBAS; - идентификатор аэропорта; - номер и литера ВПП; - определитель характеристик захода на посадку; - идентификатор маршрута; - селектор данных опорной траектории; - идентификатор опорной траектории; - широта, долгота и высота LTP/FTP; - широта и долгота  ; ;- высота пересечения порога ВПП (ТСН); - селектор единиц ТСН; - угол глиссады (GPA); - курсовая ширина; - смещение  | При специальной летной проверке могут проверяться с использованием наземной КИА |
3. Рекомендуемые параметры ЛККС приведены в таблице N 2.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров |
1 | ЗД ЛККС по напряженности поля | [дБВт/м2] | от -99 до -27 |
2 | Соответствие траектории полета на конечном участке захода на посадку | ОС | Отсутствие увода ВС от заданной траектории полета в соответствии с опубликованной схемой захода на посадку |
3 | Правильность сообщений, передаваемых на борт: | ||
а) сообщение типа 2: | цифры, | соответствие назначенному | |
- идентификатор ЛККС; | латинские буквы | (0 - 9; a - z) | |
- показатель точности наземной системы GAD; | класс | A, B, или C | |
- показатель непрерывности и целостности наземной подсистемы (GCID); | цифра | соответствие данным паспорта ЛККС (1) | |
- селектор данных опорной станции (RSDS); | цифра | соответствие назначенному (от 1 до 48,255) | |
- максимальное используемое расстояние Dmax; | [км] | соответствие данным паспорта ЛККС (от 0 до 350) | |
- локальное магнитное склонение; | [градусы] | соответствие назначенному (+/- 90) | |
- опорные точки ЛККС (широта, долгота, высота) | [градусы] | соответствие координатам антенн ЛККС (+/- 90; -520 - 6041,5; +/- 180) | |
б) сообщение типа 4: | |||
- тип операции; | цифра | соответствие назначенному (от 0 до 15) | |
- идентификатор аэропорта; | цифры, латинские буквы | соответствие назначенному (0 - 9; a - z) | |
- номер ВПП; | цифра | соответствие назначенному (от 1 до 36) | |
- литера ВПП; | цифра | соответствие назначенному (0) | |
- определитель характеристик захода на посадку; | цифра | соответствие назначенному (от 0 до 7) | |
- идентификатор маршрута; | буква | соответствие назначенному (a - z) | |
- селектор данных опорной траектории; | цифра | соответствие назначенному (от 0 до 48) | |
- порог срабатывания сигнализации по горизонтали и вертикали; | [м] | соответствие назначенному (< 40; < 10) | |
- идентификатор опорной траектории; | цифры, латинские буквы | соответствие назначенному (0 - 9; a - z) | |
- широта LTP/FTP; | [градусы] | соответствие назначенному (+/- 90) | |
- долгота LTP/FTP; | [градусы] | соответствие назначенному (+/- 180) | |
- высота LTP/FTP; | [м] | соответствие назначенному (от -512 до 6041,5) | |
- широта  ; ; | [градусы] | соответствие назначенному (+/- 1) | |
- долгота  ; ; | [градусы] | соответствие назначенному (+/- 1) | |
- высота пересечения порога при заходе на посадку (ТСН); | [м] | соответствие назначенному (от 0 до 1638,4) | |
- угол глиссады (GPA); | [градусы] | соответствие назначенному (от 0 до 90) | |
- курсовая ширина; | [м] | соответствие назначенному (от 80 до 143,75) | |
- смещение  | [м] | соответствие назначенному (от 0 до 2040) |
4. Перед началом летной проверки ЛККС, экипажу ВСЛ предоставляется информация сообщений ЛККС типа 2, 4 и номер канала ЛККС (для каждого проверяемого направления посадки).
5. Схема маневрирования ВСЛ при летной проверке зоны действия ЛККС представлена на рисунке 1.

действия ЛЛКС
5.1 Для оценки нижнего предела зоны действия ЛККС в пределах требуемой боковой зоны выполняются полеты по дугам. Выполняется полет по дуге +/- 10° поперек продолжения осевой линии конечного участка захода на посадку на расстоянии 37 км (20 м. миль) от порога ВПП, а также полет по дуге +/- 35° поперек продолжения осевой линии конечного участка захода на посадку на расстоянии 28 км (15 м. миль). Полеты выполняются на высоте 600 м (2000 фут), но не ниже минимальной безопасной высоты.
Полет по дуге +/- 35° на расстоянии 37 км (20 м. миль) может выполняться вместо полетов по дуге +/- 10° на расстоянии 37 км (20 м. миль) и по дуге +/- 35° на расстоянии 28 км (15 м. миль). Полеты по дугам для параллельных или нескольких ВПП могут быть объединены с целью минимизации времени летной проверки.
5.2 Для оценки минимального уровня напряженности поля на границах зоны действия выполняется полет на постоянной высоте вдоль продолжения осевой линии ВПП. На верхней высоте требуемой зоны действия полет выполняется на высоте 3000 м (10 000 фут) от внешней границы зоны действия с расстояния не менее 39 км (21 м. миль) (при угле 7° от порога ВПП) до расстояния 24 км (13 м. миль) и на высоте 600 м (2000 фут), но не ниже минимальной безопасной высоты, начиная с расстояния 39 км (21 м. миля) (соответствует нижнему пределу зоны действия по вертикали 0,9°) до расстояния 4,6 км (2,5 м. мили) для каждого направления посадки.
В акт летной проверки записывается минимальное значение уровня напряженности поля.
5.3 Для проверки минимального и максимального уровня напряженности поля, и соответствия траектории полета на конечном участке захода на посадку полет выполняется в соответствии со стандартной схемой захода ВС на посадку. После захвата рассчитанных курса и глиссады следует выполнить полет до высоты 30 м (100 фут). В том случае, если требуется увеличить зону действия вниз до высоты 3,7 м (12 фут) над поверхностью ВПП, максимальный и минимальный уровень напряженности поля следует подтвердить до точки касания.
6. Проверка сообщений ЛККС, передаваемых на борт ВС, проводится одновременно с определением зоны действия ЛККС.
ЛЕТНАЯ ПРОВЕРКА РАДИОНАВИГАЦИОННЫХ СРЕДСТВ ОБЕСПЕЧЕНИЯ
ПОЛЕТОВ ВОЗДУШНЫХ СУДОВ: ОСП, ОПРС
1. В процессе выполнения летной проверки ОСП определяется зона действия ПРС и МРМ, сигнал опознавания и точность привода на аэродром.
В процессе выполнения летной проверки ОПРС определяется зона действия радиостанций, сигнал опознавания и точность привода ВС.
2. Летная проверка ОСП
Вводную летную проверку рекомендуется выполнять для первого и второго комплектов ОСП на рабочей радиочастоте и для одного из вариантов резервных радиочастот, не менее чем по двум воздушным трассам. Воздушные трассы для проверки определяет руководитель организации, осуществляющей эксплуатацию наземных средств РТОП и связи.
Периодическую летную проверку рекомендуется выполнять для одного комплекта ОСП на рабочей частоте, на одной воздушной трассе. Воздушную трассу для проверки определяет руководитель организации, осуществляющей эксплуатацию наземных средств РТОП и связи. При последующих летных проверках комплекты оборудования ОСП проверяются поочередно.
2.1 Перечень параметров, рекомендуемых к проверке при вводной и периодической ЛП ОСП, приведен в таблице N 1.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД ПРС для обеспечения полетов: а) по воздушной трассе; б) в зоне аэродрома | |
2. | Опознавание | |
3. | Возможность использования в зоне аэродрома и на воздушной трассе | |
4. | ЗД МРМ: а) при полетах по ЛК и ЛГ; б) напряженность поля МРМ (ЕМ) | |
5. | Непрерывность манипуляции сигнала МРМ |
2.2 Рекомендуемые параметры ОСП приведены в таблице N 2.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров |
1. | ЗД ПРС для обеспечения полетов, не менее: | ||
а) по трассам | [км] | 150 | |
б) в зоне аэродрома | [км] | 50 | |
2. | Опознавание | ОС | Правильность присвоенного кода, ясная слышимость в ЗД |
3. | Возможность использования на аэродроме | ОС | Отсутствие колебаний стрелок АРК и увода ВС от МК на посадочной прямой более +/- 5° |
4. | ЗД МРМ на ЛК и ЛГ: | ||
а) ДМРМ | [м] | 600 +/- 200 | |
б) БМРМ | [м] | 300 +/- 100 | |
5. | Eм: | ||
а) на границах ЗД МРМ, не менее | [мкВ/м] | 1500 | |
б) в ЗД МРМ должна достигать | [мкВ/м] | 3000 | |
6. | Непрерывность манипуляции сигнала МРМ | ОС | Непрерывная последовательность манипулированного сигнала |
2.3 Дальность действия приводной радиостанции (зона действия ПРС) определяется путем оценки поведения указателя курсового угла радиостанции (далее - КУР) АРК на борту ВСЛ (ВС) и качества сигналов опознавания и передачи речевых сообщений.
При полетах ВСЛ (ВС) по воздушным трассам (коридорам) "ОТ/НА" на нижнем безопасном эшелоне выполняется проверка зоны действия ПРС. Допускается оценить зону действия ПРС по реальному воздушному движению при наблюдении за полетами ВС по воздушным трассам (коридорам). Оценку зоны действия ПРС необходимо выполнить по полетам ВС на высотах, максимально приближенным к нижнему безопасному эшелону.
При полете "НА" ("ОТ") по первой воздушной трассе проверяется 1-й (2-й) комплект на рабочей радиочастоте, а при полете "ОТ" ("НА") 2-й (1-й) комплект на резервной радиочастоте. При полете по следующей воздушной трассе "НА" ("ОТ") проверяется 2-й (1-й) комплект на резервной радиочастоте, а при полете "ОТ" ("НА") 1-й (2-й) комплект на рабочей радиочастоте.
При выполнении захода по направлению МК посадки проверяется 1-й (2-й) комплект на рабочей радиочастоте и резервной радиочастоте.
В процессе полета ВСЛ (ВС) для определения зоны действия ПРС отслеживаются показания указателя КУР АРК путем наблюдения за колебаниями стрелки и оценивается устойчивость этих показаний, колебания стрелок не должны превышать +/- 5°.
Зона действия приводной радиостанции составляет, не менее:
дальней ПРС - 150 км;
ближней ПРС - 50 км.
Сигналы опознавания считаются удовлетворительными, если кодовые символы правильные, четко прослушиваются и имеют соответствующие временные интервалы.
2.4 В процессе выполнения маневров ВСЛ (ВС) в зоне ожидания и на схеме захода на посадку проводится оценка возможности использования ОСП на аэродроме (полетопригодность ОСП).
При этом визуально наблюдаются и оцениваются правильность, устойчивость и величина отклонений указателя КУР АРК, колебания стрелки указателя не должны превышать +/- 5°.
2.5 Проверка определенной области воздушного пространства, в пределах которой сигнал аэродромного маркерного радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия МРМ), выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений, определяется путем прохода ВСЛ над дальним (ближним) МРМ по стандартной схеме захода на посадку на данном аэродроме по траектории снижения (линии курса и глиссады), дальнейшим уходом на второй круг и измерением напряженности электромагнитного поля радиомаяка (Eм) на границах и внутри зоны действия МРМ, а также измерением времени, в течение которого обеспечивается визуальная индикация и звуковая сигнализация радиомаяка.
В процессе полета ВСЛ измеряются значения напряженности электромагнитного поля радиомаяка (Eм) на границах и в зоне действия МРМ, текущие значения дальности от порога ВПП (Дi - при наличии соответствующей аппаратуры), момент превышения уровней сигнала 1,5 мВ/м и 3,0 мВ/м и время отсутствия манипулированного сигнала МРМ (провалы в диаграмме направленности радиомаяка).
Одновременно с проверкой зоны действия МРМ оценивается непрерывность манипулированного сигнала радиомаяка. Оценка манипуляции производится по визуальной и звуковой сигнализации и считается удовлетворительной, когда кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами:
ближний БМРМ - непрерывная передача чередующихся точек и тире, причем тире передаются со скоростью 2 тире в секунду, а точки - со скоростью 6 точек в секунду. При отсутствии внутреннего МРМ допускается непрерывная передача 6 точек в секунду;
дальний МРМ - непрерывная передача 2 тире в секунду.
В процессе проверки напряженности электромагнитного поля МРМ зона действия составляет:
дальний МРМ - 600 м +/- 200 м (2000 фут +/- 650 фут);
ближний МРМ - 300 м +/- 100 м (1000 фут +/- 325 фут).
2.6 При периодических летных проверках величину зоны действия МРМ  допускается проверять путем измерения промежутка времени, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) радиомаркера и истинной воздушной скорости полета ВС, по формуле:
допускается проверять путем измерения промежутка времени, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) радиомаркера и истинной воздушной скорости полета ВС, по формуле:
где  - ЗД МРМ (ширина диаграммы направленности радиомаркера), м;
- ЗД МРМ (ширина диаграммы направленности радиомаркера), м;
V1 и V2 - истинная воздушная скорость ВС при первом и втором проходе над МРМ с одного направления полета, м/с;
При этом, для повышения точности измерений, выполняется не менее двух проходов ВС над МРМ.
3. Летная проверка ОПРС
Вводная летная проверка выполняется для первого и второго комплектов ОПРС на рабочей радиочастоте, не менее чем по двум воздушным трассам с наименьшим и наибольшим углами закрытия. Периодическая летная проверка выполняется для одного комплекта ОПРС на рабочей радиочастоте, по одной воздушной трассе.
Воздушные трассы для проверки определяет руководитель организации, осуществляющей эксплуатацию наземных средств РТОП и связи.
3.1 Перечень параметров, рекомендуемых к проверке при вводной и периодической ЛП ОПРС, приведен в таблице N 3.
N п/п | Наименование параметра, характеристики | Примечание |
1. | ЗД ПРС для обеспечения полетов: а) по воздушной трассе; б) в зоне аэродрома | |
2. | Опознавание | |
3. | Возможность использования в зоне аэродрома и на воздушной трассе |
3.2 Требования к параметрам ОСП приведены в таблице N 4.
N п/п | Наименования параметров | Единицы измерений | Нормы параметров |
1. | ЗД ПРС для обеспечения полетов, не менее: | ||
а) по трассам (как ДПРС) | [км] | 150 | |
б) в зоне аэродрома (как БПРС) | [км] | 50 | |
2. | Опознавание | ОС | Правильность присвоенного кода, ясная слышимость в ЗД |
3. | Возможность использования на аэродроме | ОС | Отсутствие колебаний стрелок АРК и увода ВС от МК на посадочной прямой более +/- 5° |
3.3 Дальность действия приводной радиостанции (зона действия ОПРС) определяется в соответствии с пунктом 2.3 на рабочей радиочастоте.
При полете "НА" ("ОТ") по первой воздушной трассе проверяется 1-й (2-й) комплект на рабочей радиочастоте, а при полете "ОТ" ("НА") 2-й (1-й) комплект на рабочей радиочастоте.
При выполнении захода по направлению МК посадки проверяется 1-й (2-й) комплект на рабочей радиочастоте.
3.4 Зона действия трассового МРМ (ОПРС с МРМ) определяется путем измерения напряженности поля (Ем) на границах и внутри зоны действия при полете ВСЛ над маркером (ОПРС) на высоте проверки приводной радиостанции.
Величина зоны действия трассового МРМ зависит от высоты полета ВСЛ (ВС)  .
.
.При периодических летных проверках величину зоны действия МРМ  допускается проверять в соответствии с пунктом 2.6.
допускается проверять в соответствии с пунктом 2.6.
При этом, для повышения точности измерений, рекомендуется выполнять не менее двух проходов ВС над радиомаркером.
1. Летная проверка автоматического радиопеленгатора
1.1 Перечень параметров, рекомендуемых к проверке при вводной летной проверке АРП.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Зона действия | |
2. | Среднеквадратическая ошибка пеленгования |
Примечание:
1. Летная проверка с использованием ВСЛ выполняется по орбитам и не менее, чем по двум воздушным трассам.
2. Летная проверка с использованием специально выделенных ВС выполняется по радиолокационной информации, получаемой при наблюдении за радиальными полетами ВС.
1.2 Перечень параметров, рекомендуемых к проверке при периодической летной проверке АРП.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Среднеквадратическая ошибка пеленгования |
Примечание:
1. Летная проверка с использованием ВСЛ выполняется для аэродромного АРП только по орбитам, трассового АРП не менее чем по одной воздушной трассе и для аэродромно-трассового АРП по орбитам и не менее чем по одной воздушной трассе.
2. Летная проверка с использованием специально выделенных ВС выполняется по радиолокационной информации, получаемой при наблюдении за радиальными полетами ВС.
2. Летная проверка первичного канала аэродромных обзорных
радиолокаторов (ОРЛ-А), трассовых обзорных радиолокаторов
(ОРЛ-Т), аэродромных радиолокационных комплексов (АРЛК)
и трассовых радиолокационных комплексов (ТРЛК)
2.1. Перечень параметров первичного канала рекомендуемых к проверке при вводной летной проверке ОРЛ-А, ОРЛ-Т, АРЛК и ТРЛК.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Оптимальный угол наклона антенны | Определяется для одного комплекта оборудования |
2. | Зона действия | Область пространства, в котором вероятность обнаружения ВС с ЭПР = 5 кв. м, составляет Pобн >= 0,9 при вероятности ложных тревог Pлт <= 10-6 |
3. | Среднеквадратическая ошибка измерения координат ВС: - по азимуту - по дальности | |
4. | Вероятность обнаружения ВС | |
5. | Непрерывность наблюдения на посадочных курсах | Проверка выполняется для ОРЛ-А или АРЛК |
6. | Непрерывность наблюдения в зонах ожидания | |
7. | Оценка качества обработки и отображения информации наблюдения на КСА УВД | Проверка выполняется на всех КСА УВД, обрабатывающих информацию наблюдения от проверяемого радиолокатора |
Примечания:
1. Летная проверка выполняется для двух комплектов оборудования не менее, чем по двум воздушным трассам.
2.2 Перечень параметров первичного канала рекомендуемых к проверке при периодической летной проверке ОРЛ-А, ОРЛ-Т, АРЛК и ТРЛК.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Зона действия | При проведении летной проверки с использованием специально выделенных (рейсовых) ВС допускается минимальную дальность обнаружения первичного канала не проверять (при отсутствии необходимых профилей полетов ВС) |
2. | Среднеквадратическая ошибка измерения координат ВС: - по азимуту - по дальности | |
3. | Вероятность обнаружения ВС | |
4. | Непрерывность наблюдения на посадочных курсах | Проверка выполняется для ОРЛ-А или АРЛК |
5. | Непрерывность наблюдения в зонах ожидания | |
6. | Оценка качества обработки и отображения информации наблюдения на КСА УВД | Проверка выполняется на всех КСА УВД, обрабатывающих информацию наблюдения от проверяемого радиолокатора |
Примечания:
1. Летная проверка выполняется для одного комплекта оборудования не менее чем по одной воздушной трассе.
2. Допускается при проведении периодических и специальных летных проверок первичного канала РЛК оценить зону действия, вероятностные и точностные характеристики с использованием информации, получаемой при наблюдении за реальным воздушным движением. В этом случае параметры первичного канала РЛК определяются по полетам специально выделенных ВС по стандартным схемам прибытия и вылета, зонам ожидания и воздушным трассам.
3. Значения параметров проверяемого первичного канала рекомендуется получить с использованием СПО радиолокатора, СПО сторонних организаций (АСК РЛС, АК РЛП "Радиан" или др.), а также расчетным способом с использованием данных получаемых при наблюдении за реальным воздушным движением.
3. Летная проверка вторичного канала аэродромных
радиолокационных комплексов (АРЛК), трассовых
радиолокационных комплексов (ТРЛК) и автономных вторичных
радиолокаторов (ВРЛ)
3.1 Перечень параметров вторичного канала рекомендуемых к проверке при вводной летной проверке АРЛК, ТРЛК и ВРЛ.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Оптимальный угол наклона антенны | Определяется для одного комплекта оборудования |
Зона действия | ||
3. | Среднеквадратическая ошибка измерения координат ВС: - по азимуту - по дальности | |
4. | Вероятность обнаружения ВС | |
5. | Вероятность прохождения дополнительной информации | |
6. | Непрерывность наблюдения на посадочных курсах | Проверка выполняется при использовании РЛК для наблюдения за воздушным движением на посадочных курсах |
7. | Непрерывность наблюдения в зонах ожидания | Проверка выполняется при использовании РЛК для наблюдения за воздушным движением в зонах ожидания |
8. | Оценка эффективности систем подавления сигналов по боковым лепесткам и ВАРУ | |
Оценка качества обработки и отображения информации наблюдения на КСА УВД | Проверка выполняется на всех КСА УВД, обрабатывающих информацию наблюдения от проверяемого радиолокатора |
Примечания:
1. Летная проверка выполняется для двух комплектов оборудования не менее чем по двум воздушным трассам.
2. Проверки по п.п. 2 - 9 проводятся для всех режимов работы вторичного канала ("УВД", "RBS", "S"), которые обеспечивает радиолокатор.
3.2 Перечень параметров вторичного канала рекомендуемых к проверке при периодической летной проверке АРЛК, ТРЛК и ВРЛ.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Зона действия | При проведении летной проверки с использованием специально выделенных (рейсовых) ВС допускается минимальную дальность обнаружения вторичного канала не проверять (при отсутствии необходимых профилей полетов ВС) |
2. | Среднеквадратическая ошибка измерения координат ВС: - по азимуту - по дальности | |
3. | Вероятность обнаружения ВС | |
4. | Вероятность прохождения дополнительной информации | |
5. | Непрерывность наблюдения на посадочных курсах | Проверка выполняется при использовании РЛК для наблюдения за воздушным движением на посадочных курсах |
6. | Непрерывность наблюдения в зонах ожидания | Проверка выполняется при использовании РЛК для наблюдения за воздушным движением в зонах ожидания |
7. | Оценка качества обработки и отображения информации наблюдения на КСА УВД | Проверка выполняется на всех КСА УВД, обрабатывающих информацию наблюдения от проверяемого радиолокатора |
Примечание:
1. Летная проверка выполняется для одного комплекта оборудования не менее чем по одной воздушной трассе.
2. Проверки параметров вторичного канала проводятся для всех режимов работы ("УВД", "RBS", "S"), которые обеспечивает радиолокатор.
3. Допускается при проведении периодических и специальных летных проверок вторичного канала РЛК оценить зону действия, вероятностные и точностные характеристики с использованием информации, получаемой при наблюдении за реальным воздушным движением. В этом случае параметры вторичного канала РЛК определяются по полетам специально выделенных ВС по стандартным схемам прибытия и вылета, зонам ожидания и воздушным трассам.
4. Значения параметров проверяемого вторичного канала рекомендуется получить с использованием СПО радиолокатора, СПО сторонних организаций (АСК РЛС, АК РЛП "Радиан" или др.), а также расчетным способом с использованием данных, получаемых при наблюдении за реальным воздушным движением.
4. Летная проверка наземной станции, системы вещательного
автоматического зависимого наблюдения
4.1 Перечень параметров, рекомендуемых к проверке при вводной и периодической летной проверке станции, системы АЗН-В.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Зона действия | |
2 | Правильность информации сообщений, передаваемых с борта ВС |
Примечание:
Вводная летная проверка выполняется для двух комплектов оборудования станции (системы) АЗН-В не менее чем по двум воздушным трассам.
Периодическая летная проверка выполняется для одного комплекта оборудования станции (системы) АЗН-В не менее чем по одной воздушной трассе.
5. Летная проверка средств авиационной
воздушной электросвязи
5.1 Перечень параметров, рекомендуемых к проверке при вводной летной проверке АВЭС.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Зона действия | |
2 | Возможность использования для обеспечения полетов |
6. Летная проверка системы визуального наблюдения, комплекса
средств удаленного видеонаблюдения
6.1 Перечень параметров, рекомендуемых к проверке при вводной и периодической летной проверке системы визуального наблюдения, КСА УВН.
ИС МЕГАНОРМ: примечание. Сноски в таблице даны в соответствии с официальным текстом документа. |
N п/п | Наименование параметра, характеристики | Примечание |
1 | Зона действия в режиме панорамного наблюдения (обнаружение объектов): - днем; - в сумерках <1>; - ночью <*> | Обнаружение объектов ВС, ТС, человека на площади маневрирования и ВС, заходящего на посадку |
2 | Зона действия в режиме детального наблюдения (распознавание объектов): - днем; - в сумерках <*>; - ночью <*> | Распознавание объектов ВС, ТС, человека на площади маневрирования и ВС, заходящего на посадку |
Примечание: Выполняется при наличии ИК камер.
7. Летная проверка радиолокационной системы обзора
летного поля
7.1 Перечень параметров РЛС ОЛП, рекомендуемых к проверке при вводной и периодической летной проверке.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Зона действия | |
2 | Вероятность обнаружения ВС/ТС | |
3 | Погрешность горизонтального местоположения ВС/ТС с доверительной вероятностью 95% | |
4 | Оценка качества обработки и отображения информации наблюдения на КСА УВД и/или КСА НКАД | Проверка выполняется на всех средствах автоматизации, обрабатывающих информацию наблюдения от проверяемого радиолокатора |
Примечание:
1. Вводная летная проверка выполняется для первого и второго комплекта. Периодическая летная проверка выполняется для одного комплекта.
2. Допускается проверка погрешности горизонтального местоположения ВС/ТС по реальному наземному движению ВС и ТС с использованием контрольных точек с известными координатами.
8. Летная проверка аэродромной многопозиционной
системы наблюдения
8.1 Перечень параметров МПСН-А, рекомендуемых к проверке при вводной и периодической летной проверке.
N п/п | Наименование параметра, характеристики | Примечание |
Зона действия в районе аэродрома для воздушных целей | Летная проверка выполняется 1 раз в 3 года с использованием ВСЛ (ВС) | |
Зона действия: а) площадь маневрирования; б) перрон; в) в зоне стоянки (исключая стоянки на перроне) | Летная проверка выполняется ежегодно с использованием ТС | |
Погрешность горизонтального местоположения ВС при заходе на посадку с доверительной вероятностью 95%: а) на расстоянии 4,6 км от каждого порога ВПП; б) на расстоянии от 4,6 до 9,6 км от каждого порога ВПП | ||
Погрешность горизонтального местоположения ВС/ТС с доверительной вероятностью 95%: а) площадь маневрирования; б) перрон | ||
Погрешность горизонтального местоположения ВС/ТС с доверительной вероятностью 99%: а) площадь маневрирования; б) перрон | ||
Средняя погрешность горизонтального местоположения ВС/ТС за 5 секунд в зоне стоянок | ||
7. | Оценка качества обработки и отображения информации наблюдения на КСА УВД и/или КСА НКАД | Проверка выполняется на всех средствах автоматизации, обрабатывающих информацию наблюдения от проверяемой МПСН-А |
Примечание:
1. Летная проверка параметров 1 и 3 выполняется 1 раз в 3 года с использованием ВСЛ (ВС) по всем схемам маневрирования в районе аэродрома, обслуживаемых МПСН-А.
2. Летная проверка параметров 2, 4, 5, 6 выполняется ежегодно с использованием ТС, оборудованного мобильным радиомаяком.
3. Значения параметров рекомендуется получить с использованием СПО или расчетным способом с использованием данных, получаемых при наблюдении за реальным наземным движением. В этом случае расчет значений точностных параметров МПСН-А выполняется по движению ВС/ТС по контрольным точкам на аэродроме с известными координатами.
9. Летная проверка многопозиционной системы наблюдения
9.1 Перечень параметров МПСН-Ш, рекомендуемых к проверке при вводной и периодической летной проверке.
N п/п | Наименование параметра, характеристики | Примечание |
1. | Зона действия: а) в трассовой зоне; б) в аэродромной зоне | |
Среднеквадратическая ошибка определения координат с вероятностью 0,95: а) в трассовой зоне; б) в аэродромной зоне | ||
Среднеквадратическая ошибка определения местоположения ВС при проверке резервирования N-1 в трассовой зоне | Параметр проверяется только при вводной летной проверке | |
4. | Погрешность измерения геометрической высоты ВС | Проверяется при вводной летной проверке в зоны HMU (при наличии) |
5. | Оценка качества обработки и отображения информации наблюдения на КСА УВД | Проверка выполняется на всех средствах автоматизации, обрабатывающих информацию наблюдения от проверяемой МПСН-Ш |
Примечание:
1. Проверки параметра 2 и 3 проводятся для каждого режима "RBS" и "S" работы самолетного ответчика.
2. Допускается при проведении периодических и специальных летных проверок оценить зону действия и точностные характеристики с использованием информации, получаемой при наблюдении за реальным воздушным движением. В этом случае параметры МПСН-Ш определяются по полетам специально выделенных (рейсовых) ВС по стандартным схемам прибытия и вылета, зонам ожидания и воздушным трассам.
3. Вводная летная проверка выполняется для двух комплектов оборудования не менее чем по двум воздушным трассам, периодическая летная проверка выполняется для одного комплекта оборудования не менее чем по одной воздушной трассе.
ИС МЕГАНОРМ: примечание. Нумерация пунктов дана в соответствии с официальным текстом документа. |
3. При выполнении летной проверки с использованием специально выделенных (рейсовых) ВС значения параметров МПСН-Ш рекомендуется получить с использованием СПО (АСК РЛС или др.), а также расчетным способом с использованием данных наблюдения.
10. Летная проверка ССО
10.1 Перечень параметров систем ССО, рекомендуемых к проверке при вводной и периодической (полугодовой и годовой) летной проверке.
N п/п | Наименование параметра, характеристики | Примечание |
1 | Схема расположения огней ССО | |
2 | Объем не горящих (отсутствующих) огней | |
3 | Яркость огней в подсистемах | Проверяется сбалансированность световой картины системы ССО |
4 | Цветовая маркировка осевых огней ВПП | |
5 | Цветовая маркировка боковых огней ВПП | |
6 | Цветовая маркировка огней знака обозначения РД скоростного схода с ВПП | |
7 | Цветовая маркировка огней РД скоростного схода с ВПП | |
8 | Работа устройств дистанционного управления | Проверяется отсутствие темновых промежутков при переключении ступеней яркости |
9 | Правильность набора групп огней с панели оператора управления (ПОУ) диспетчера |
10.2 Перечень параметров, рекомендуемых к проверке при вводной и периодической летной проверке глиссадных огней (PAPI/APAPI, HAPI).
N п/п | Наименование параметра, характеристики | Примечание |
1 | Углы наклона глиссадных огней | |
2 | Соответствие траекторий полета ВС при заходе на посадку с использованием световой глиссады глиссаде РМС | При наличии на аэродроме РМС |