СПРАВКА
Источник публикации
М.: ФГБУ "Институт стандартизации", 2025
Примечание к документу
Документ вводится в действие с 01.01.2027 с правом досрочного применения.
Название документа
"ГОСТ IEC 61000-4-21-2024. Межгосударственный стандарт. Электромагнитная совместимость. Часть 4-21. Методы испытаний и измерений. Методы испытаний в реверберационной камере"
(введен в действие Приказом Росстандарта от 13.11.2025 N 1374-ст)
"ГОСТ IEC 61000-4-21-2024. Межгосударственный стандарт. Электромагнитная совместимость. Часть 4-21. Методы испытаний и измерений. Методы испытаний в реверберационной камере"
(введен в действие Приказом Росстандарта от 13.11.2025 N 1374-ст)
Содержание
Приказом Федерального
агентства по техническому
регулированию и метрологии
от 13 ноября 2025 г. N 1374-ст
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ
ЧАСТЬ 4-21
МЕТОДЫ ИСПЫТАНИЙ И ИЗМЕРЕНИЙ
МЕТОДЫ ИСПЫТАНИЙ В РЕВЕРБЕРАЦИОННОЙ КАМЕРЕ
Electromagnetic compatibility.
Part 4-21. Testing and measurement techniques.
Reverberation chamber test methods
(IEC 61000-4-21:2011, Electromagnetic compatibility (EMC) -
Part 4-21: Testing and measurement techniques -
Reverberation chamber test methods, IDT)
ГОСТ IEC 61000-4-21-2024
МКС 33.100.01
Дата введения
1 января 2027 года
с правом досрочного применения
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Испытания и сертификация бытовой и промышленной продукции "БЕЛЛИС" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 31 мая 2024 г. N 173-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узбекское агентство по техническому регулированию |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 13 ноября 2025 г. N 1374-ст межгосударственный стандарт ГОСТ IEC 61000-4-21-2024 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2027 г. с правом досрочного применения
5 Настоящий стандарт идентичен международному стандарту IEC 61000-4-21:2011 "Электромагнитная совместимость (ЭМС). Часть 4-21. Методы испытаний и измерений. Методы испытаний в реверберационной камере" ("Electromagnetic compatibility (EMC) - Part 4-21: Testing and measurement techniques - Reverberation chamber test methods", IDT).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ 1.5-2001 (подраздел 3.6).
Международный стандарт разработан подкомитетом 77A "Низкочастотные электромагнитные явления" Технического комитета по стандартизации 77 "Электромагнитная совместимость" Международной электротехнической комиссии (IEC).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
Стандарты серии IEC 61000 публикуются отдельными частями в соответствии со следующей структурой:
- часть 1. Общие положения:
- Общее рассмотрение (введение, фундаментальные принципы);
- Определения, терминология;
- часть 2. Электромагнитная обстановка:
- Описание электромагнитной обстановки;
- Классификация электромагнитной обстановки;
- Уровни электромагнитной совместимости;
- часть 3. Нормы:
- Нормы помехоэмиссии;
- Нормы помехоустойчивости (в тех случаях, когда они не являются предметом рассмотрения техническими комитетами, разрабатывающими стандарты на продукцию);
- часть 4. Методы испытаний и измерений:
- Методы измерений;
- Методы испытаний;
- часть 5. Руководства по установке и помехоподавлению:
- Руководство по установке;
- Методы помехоподавления и устройства;
- часть 6. Общие стандарты;
- часть 9. Разное.
Каждая часть состоит из разделов, которые могут быть опубликованы как международные стандарты или как технические отчеты. Некоторые из них уже опубликованы. Другие будут опубликованы с номером части, за которым следуют дефис и второй номер, идентифицирующий раздел (например, IEC 61000-6-1).
В настоящем стандарте рассматриваются испытания на помехоустойчивость и преднамеренные или непреднамеренные излучаемые радиопомехи от электрического и/или электронного оборудования, а также испытания эффективности экранирования в реверберационных камерах. В нем устанавливаются необходимые испытательные процедуры для проведения таких испытаний. В настоящем стандарте рассматриваются только излучаемые явления.
Целью настоящего стандарта является установление общих принципов оценки для использования реверберационных камер для оценки качества функционирования электрического и электронного оборудования при воздействии радиочастотных электромагнитных полей и для определения уровней радиочастотного излучения, создаваемого электрическим и электронным оборудованием.
Примечание - В настоящем стандарте определены методы испытаний для измерения воздействия электромагнитного излучения на оборудование и электромагнитных излучений от соответствующего оборудования. Моделирования и измерения электромагнитного излучения недостаточно для количественного определения эффектов. Определенные методы испытаний организованы с целью установления адекватной воспроизводимости результатов испытаний и качественного анализа эффектов.
Настоящий стандарт не предназначен для определения испытаний, которые должны применяться к конкретному устройству или системе. Его основная цель состоит в том, чтобы дать общую базовую справку всем заинтересованным комитетам по продуктам IEC. Комитеты по продуктам должны выбирать нормы излучаемых радиопомех и методы испытаний в консультации с CISPR. Комитеты по продуктам по-прежнему несут ответственность за надлежащий выбор испытаний на помехоустойчивость и нормы для испытаний на помехоустойчивость, которые должны применяться к их оборудованию. Другие методы, такие как те, которые описаны в IEC 61000-4-3, CISPR 16-2-3 и CISPR 16-2-4, могут быть использованы <1>.
--------------------------------
<1> Для получения дополнительной информации проконсультируйтесь с CISPR (Международный специальный комитет по радиопомехам) или Техническим комитетом 77 (электромагнитная совместимость).
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
IEC 60050-161:1990, International Electrotechnical Vocabulary - Chapter 161: Electromagnetic compatibility (Международный электротехнический словарь. Глава 161. Электромагнитная совместимость)
Amendment 1 (1997)
Amendment 2 (1998)
IEC 60068-1, Environmental testing - Part 1: General and guidance (Испытания на воздействие внешних факторов. Часть 1. Общие положения и руководство)
IEC 61000-4-3:2006 <*>, Electromagnetic compatibility (EMC) - Part 4-3: Testing and measurement techniques - Radiated, radio-frequency, electromagnetic field immunity test (Электромагнитная совместимость (ЭМС). Часть 4-3. Методы испытаний и измерений. Испытание на устойчивость к излучаемому радиочастотному, электромагнитному полю)
--------------------------------
<*> Действует IEC 61000-4-3:2020. Однако для однозначного соблюдения требования настоящего стандарта, выраженного в датированной ссылке, рекомендуется использовать только указанное в этой ссылке издание.
Amendment 1 (2007)
CISPR 16-1-1, Specification for radio disturbance and immunity measuring apparatus and methods - Part 1-1: Radio disturbance and immunity measuring apparatus - Measuring apparatus (Требования к аппаратуре для измерения радиопомех и помехоустойчивости и методы измерения. Часть 1-1. Аппаратура для измерения радиопомех и помехоустойчивости. Измерительная аппаратура)
CISPR 16-2-3, Specification for radio disturbance and immunity measuring apparatus and methods - Part 2-3: Methods of measurement of disturbances and immunity - Radiated disturbance measurements (Требования к аппаратуре для измерения радиопомех и помехоустойчивости и методы измерения. Часть 2-3. Аппаратура для измерения радиопомех и помехоустойчивости. Измерения излучаемых радиопомех)
3.1 Термины и определения
В настоящем стандарте применены термины по IEC 60050-161, а также следующие термины с соответствующими определениями.
3.1.1 антенна (antenna): Часть системы радиопередачи или приема, предназначенная для обеспечения требуемой связи между передатчиком или приемником и средой, в которой распространяется радиоволна.
[IEC 60050-712:1992 (терминологическая статья 712-01-01)]
Примечание - Для целей этой процедуры предполагается, что антенны имеют эффективность 75% или более.
3.1.2 электромагнитная волна (electromagnetic wave, EM wave): Волна, характеризующаяся распространением изменяющегося во времени электромагнитного поля и вызванная ускорением электрических зарядов.
[IEC 60050-705:1995 (терминологическая статья 705-01-09), модификация]
3.1.3 область дальнего поля (far field region): Область электромагнитного поля антенны или непреднамеренного излучателя, в которой преобладающими компонентами поля являются те, которые представляют собой распространение энергии, и в которой угловое распределение поля по существу не зависит от расстояния до антенны.
Примечание 1 - В области дальнего поля все компоненты электромагнитного поля уменьшаются обратно пропорционально расстоянию от антенны.
Примечание 2 - Для бортовой антенны, имеющей максимальный габаритный размер D, который является большим по сравнению с длиной волны  , область дальнего поля обычно принимается как существующая на расстояниях, превышающих
, область дальнего поля обычно принимается как существующая на расстояниях, превышающих  от антенны в направлении максимального излучения.
от антенны в направлении максимального излучения.
от антенны в направлении максимального излучения.[IEC 60050-712:1992 (терминологическая статья 712-02-02)]
Область, удаленная от источника или апертуры, где диаграмма направленности не меняется с расстоянием от источника.
[IEC 60050-731:1991 (терминологическая статья 731-03-92)]
3.1.4 напряженность поля (field strength): Величина электромагнитного поля, создаваемого в заданной точке радиопередающей системой, работающей на определенной характерной частоте с заданными условиями установки и модуляции.
[IEC 60050-705:1995 (терминологическая статья 705-08-31)]
Примечание 1 - Термин "напряженность электрического поля" (в В/м) или "напряженность магнитного поля" (в А/м) используется в зависимости от того, измеряется ли величина электрического или магнитного поля соответственно. В области ближнего поля соотношение между напряженностью электрического и магнитного полей и расстоянием зависит от конкретной используемой конфигурации. Плотность потока мощности поля аналогично не определена.
Примечание 2 - В дальней зоне напряженность поля иногда связывается с плотностью потока мощности P. Для плоской волны в свободном пространстве  ,
,
,где E - напряженность электрического поля;
ИС МЕГАНОРМ: примечание. Обозначение дано в соответствии с официальным текстом документа. |
 .
.3.1.5 поляризация (polarization): Свойство синусоидальной электромагнитной волны или вектора поля, определяемое в фиксированной точке пространства направлением вектора напряженности электрического поля или любого заданного вектора поля; когда это направление меняется со временем, свойство может характеризоваться местоположением, описываемым оконечностью рассматриваемого вектора поля.
[IEC 60050-726:1982 (терминологическая статья 726-04-01)]
3.1.6 реверберационная камера (reverberation chamber): Помещение, специально спроектированное для обеспечения очень длительного времени реверберации.
[IEC 60050-723:1997 (терминологическая статья 723-03-30)]
реверберационная комната (reverberation room): Комната с длительным временем реверберации, специально спроектированная таким образом, чтобы поле в ней было как можно более рассеянным.
Примечание 1 - Комната состоит из экранированного помещения, которое обычно оснащено механическими регуляторами/мешалками, которые изменяют (перемешивают) граничные условия внутри помещения и, таким образом, изменяют структуру электромагнитных полей внутри помещения.
[IEC 60050-801:1994 (терминологическая статья 801-31-13), модификация]
Примечание 2 - Реверберационная комната используется, в частности, для измерения коэффициентов поглощения материалов и измерения мощности, излучаемой преднамеренными или непреднамеренными источниками излучения.
Примечание 3 - Проведение испытаний в реверберационной камере может быть описано как случайный процесс, в котором механические регуляторы/мешалки "перемешивают" "моды" внутри камеры. Поэтому такие камеры также называют камерой с перемешиванием, камерой с перемешиванием мод или с настройкой мод.
3.1.7 фактор качества (для реверберационной камеры) Q [quality factor (of a reverberation chamber), Q]: Частотно-зависимая мера резкости резонанса, равная  отношению максимальной накопленной энергии к энергии, рассеянной за один период,
отношению максимальной накопленной энергии к энергии, рассеянной за один период,
отношению максимальной накопленной энергии к энергии, рассеянной за один период,[IEC 60050-151:2001 (терминологическая статья 151-15-46), модификация]
Примечание - Для данной камеры Q изменяется в зависимости от частоты и может быть рассчитано по следующему уравнению:
 (1)
(1)где V - объем камеры, м3;
PAveRec/PInput - отношение принятой мощности к входной мощности, каждая из которых усреднена по одной полной последовательности регулятора/мешалки;
n - количество местоположений и ориентаций антенн, для которых оценивается Q. Только одно местоположение требуется (как минимум); однако могут быть оценены несколько местоположений и ориентаций и данные усреднены по ним.
--------------------------------
3.1.8 Q-полоса пропускания (реверберационной камеры) BWQ [Q-bandwidth (of a reverberation chamber), BWQ]: Мера частотного диапазона, в котором режимы в реверберационной камере коррелируют (см. раздел A.2).
Примечание - BWQ реверберационной камеры может быть рассчитана по следующему уравнению:
BWQ = f/Q, (2)
где f - частота, Гц;
Q - фактор качества, определенный в 3.1.7.
ИС МЕГАНОРМ: примечание. Текст дан в соответствии с официальным текстом документа. |
3.1.9 неисправность (malfunction): (malfunction): Потеря способности оборудования инициировать или поддерживать требуемую функцию или инициирование нежелательного ложного действия, которое может привести к неблагоприятным последствиям.
Примечание - Критерии функциональной пригодности должны быть точно указаны.
[IEC 60050-393:2003 (терминологическая статья 393-17-79)]
3.1.10 излучение (emission): Явление, при котором энергия исходит от источника в форме волн или частиц.
[IEC 60050-702:2003 (терминологическая статья 702-02-03)]
3.1.11 регулятор [мешалка] (tuner/stirrer): Механическое устройство, изготовленное из электропроводящего материала с низкими потерями, которое изменяет электромагнитные граничные условия внутри реверберационной камеры.
Примечание - В общем случае реверберационная камера представляет собой экранированное помещение, наименьший размер которого является большим по отношению к длине волны на самой низкой используемой частоте. Камера обычно оснащена механическим устройством для регулировки [перемешивания], размеры которого составляют значительные доли от размеров камеры и длины волны на самой низкой используемой частоте. Когда камера возбуждается радиочастотной энергией, граничные условия результирующей многомодовой электромагнитной среды могут быть изменены механическим регулятором [мешалкой]. Результирующая среда является статистически однородной и статистически изотропной (т.е. энергия, поступающая со всех сторон со всеми направлениями поляризации), если рассматривать ее в достаточно большом количестве положений механического регулятора [мешалки].
3.1.12 электромагнитная мода (electromagnetic mode): Одно решение уравнений Максвелла, представляющее электромагнитное поле в определенной пространственной области и принадлежащее семейству независимых решений, определяемых заданными граничными условиями.
3.1.13 проверка (validation): Процесс, подтверждающий, что доработанные контрольно-измерительные приборы, система управления (аппаратное и программное обеспечение) и испытательный комплекс соответствуют всем его функциональным требованиям, эффективности и интерфейсу.
[IEC 60050-394:2007 (терминологическая статья 394-40-42), модификация]
3.1.14 проверка камеры (chamber validation): Процесс подтверждения того, что камера соответствует всем ее функциональным требованиям, качеству и интерфейсу.
[IEC 60050-394:2007 (терминологическая статья 394-40-42), модификация]
3.1.15 внутренняя неопределенность поля (intrinsic field uncertainty, IFU): Вклад в общий бюджет неопределенности, вызванный случайным (статистическим) характером поля внутри реверберационной камеры.
Примечание - Как правило, внутренняя неопределенность поля значительно больше, чем погрешность измерительных приборов при типичной работе реверберационной камеры, за исключением случаев, когда камера имеет исключительно высокий фактор качества. В результате IFU, как правило, является единственным или основным вкладом, который следует учитывать при оценке общей неопределенности во время испытания или измерения.
3.1.16 рабочий объем (working volume): Область, определяемая 8 точками внутри камеры на достаточном расстоянии от стенок, чтобы избежать граничных эффектов, для прямоугольных камер, обычно определяемых углами области куба или параллелепипеда на расстоянии четверти длины волны от ближайших стен.
Примечание - Для частот ниже 100 МГц расстояния могут быть ограничены 0,75 м.
3.2 Сокращения
AVF - коэффициент проверки антенны (Antenna Validation Factor);
CVF - коэффициент проверки камеры (Chamber Validation Factor);
CDF - функция кумулятивного распределения (Cumulative Distribution Function);

CLF - коэффициент нагрузки камеры (Chamber Loading Factor);
CW - непрерывная волна (Continuous Wave);
EM - электромагнитный (Electromagnetic);
EMC - электромагнитная совместимость (Electromagnetic Compatibility);
EMI - электромагнитные помехи (Electromagnetic Interference);
EUT - испытуемое оборудование (ИО) (Equipment Under Test);
IEC - Международная электротехническая комиссия (International Electrotechnical Commission);
IEEE - Институт инженеров по электротехнике и электронике (Institute of Electrical and Electronics Engineers);
IF - частота изображения (Image Frequency);
IFU - внутренняя неопределенность поля (Intrinsic Field Uncertainty);
IL - вносимые потери (Insertion Loss);
ISO - Международная организация по стандартизации (International Organization for Standardization);
LUF - самая низкая используемая частота (Lowest Usable Frequency);
MIU - измерительная инструментальная неопределенность (Measurement Instrumentation Uncertainty);
MU - измерительная неопределенность (Measurement Uncertainty);
OATS - открытая испытательная площадка (Open Area Test Site);
PDF - функция плотности вероятности (Probability Density Function);
RC - реверберационная камера (Reverberation Chamber);
RE - излучаемые помехи (Radiated Emissions);
RF - радиочастотный (Radio Frequency);
RMS - среднеквадратичное значение (Root Mean Square);
rps - обороты в секунду (revolutions per second);
RSS - корень из суммы квадратов (Root Sum of the Squares);
Rx - приемная (антенна) (Receive (antenna));
SE - эффективность экранирования (Shielding Effectiveness);
SW - модуляция меандром (Square Wave modulation);
TFVF - коэффициент проверки испытательного приспособления (Test Fixture Validation Factor);
Tx - передающая (антенна) (Transmit (antenna)).
--------------------------------
Большинство электронных устройств тем или иным образом подвержено воздействию электромагнитного излучения. Источники излучения могут быть естественного или искусственного происхождения и могут быть преднамеренными или непреднамеренными.
Примерами преднамеренных излучателей являются беспроводные и персональные системы связи. Примерами непреднамеренных излучателей являются сварочные аппараты, тиристоры, высокоскоростные шины передачи данных, люминесцентные светильники, переключатели, работающие с индуктивными нагрузками, и т.д.
Реалистичные условия распространения электромагнитных волн часто характеризуются множественными отражениями и эффектами многолучевости. Реверберационные камеры в какой-то мере имитируют такие сложные условия экстремальным образом (эффект наихудшего случая) и в этом отношении могут быть более репрезентативными, чем другие методы испытаний на электромагнитную совместимость. Преимуществом реверберационных камер является способность генерировать статистически изотропное, однородное, неполяризованное и некоррелированное внутреннее поле за счет действия регулятора/мешалки.
Электромагнитные поля высокого уровня легко и безопасно генерируются с помощью реверберационных камер.
Высокий фактор качества, или Q, таких камер позволяет генерировать довольно высокие напряженности поля при относительно умеренных входных мощностях (резонансные поля). Отсутствие поглотителя делает генерацию высоких уровней поля более безопасной, поскольку исключается риск воспламенения поглотителей. Надлежащая экранировка помещения ограничивает высокие поля внутренней частью камеры.
Метод реверберационной камеры подходит для проведения испытаний от относительно низких до чрезвычайно высоких уровней поля. Благодаря высокому уровню изоляции от окружающей среды испытания на излучаемые радиопомехи и помехоустойчивость могут проводиться для большинства коммерческих требований без ограничений. В настоящее время IEC устанавливает частоту перехода на уровне 80 МГц для испытания на помехоустойчивость при проведении испытаний к излучаемым помехам и кондуктивным помехам.
Примечание - IEC 61000-4-6 также определяет методы испытаний для установления помехоустойчивости электрического и электронного оборудования к кондуктивной электромагнитной энергии. IEC 61000-4-6 охватывает частоты ниже 80 МГц.
Как указано в приложении A, диапазон частот испытаний определяется размером и конструкцией камеры и эффективностью механических устройств регулировки в изменении пространственной структуры поля. Нет никаких принципиальных ограничений в отношении формы и размера помещений, пригодных для использования в качестве реверберационных камер. Однако для обеспечения хороших реверберационных свойств при заданной частоте работы требуется минимальный размер камеры. Реверберационные камеры комнатного размера (например, объемом от 75 до 100 м3) обычно работают в диапазоне от 200 МГц до 18 ГГц без ограничений. Для работы ниже 200 МГц требуются камеры большего размера, чем типичное экранированное помещение.
6.1 Устойчивость к излучаемым помехам
Использование реверберационных камер для проведения испытаний на помехоустойчивость к излучаемым помехам описано в приложении D. Это приложение охватывает установку для испытаний, проверку камеры и процедуры испытаний. Ввод заданного уровня радиочастотной мощности в камеру создает желаемую напряженность поля внутри камеры. Этот заранее определенный уровень радиочастотной мощности получен из данных проверки камеры, описанных в приложениях B и C.
6.2 Излучаемые радиопомехи
Использование реверберационных камер для измерения излучаемых радиопомех описано в приложении E. Описанный способ измеряет величину радиочастотной мощности, излучаемой испытуемым оборудованием в пределах полосы пропускания измерительного оборудования. Как и при испытании на устойчивость к излучаемым помехам, для определения уровней излучаемых радиопомех используются данные проверки камеры, описанные в приложениях B и C.
6.3 Эффективность экранирования
Три приложения посвящены проведению измерений эффективности экранирования. Измерения эффективности экранирования кабельных узлов, кабелей, соединителей, волноводов и пассивных микроволновых компонентов описаны в приложении F. Приложение G описывает эффективность экранирования прокладок и материалов. Подход, описанный в приложении G, использует методологию вложенных камер (например, реверберационная камера, расположенная внутри реверберационной камеры большего размера). Приложение G также охватывает проверку испытательных приспособлений, которые обычно необходимы для проведения измерений эффективности экранирования прокладок и материалов. Незначительные различия в конструкции испытательного приспособления могут оказать существенное влияние на результаты испытаний. Материалы приспособления, расстояние между болтами, отделка поверхности, настройки крутящего момента и т.д. должны контролироваться для получения повторяемых результатов. Из-за большого количества вариантов, которые потребовались бы для размещения множества различных прокладок и материалов, требующих оценки, в настоящем приложении не содержится подробных указаний по проектированию испытательных приспособлений. Приложение H охватывает измерения эффективности экранирования корпусов. Как и в приложении G, методология, описанная в приложении H, использует подход вложенной камеры.
Рекомендуются следующие типы испытательного оборудования:
- реверберационная камера, имеющая размер, достаточный для поддержания многорежимной электромагнитной среды по отношению к самой низкой испытательной частоте. Это означает, что размеры камеры во всех направлениях должны быть большими по сравнению с длиной волны;
- механические регуляторы/мешалки (см. приложение A), имеющие один размер, который составляет по меньшей мере четверть длины волны на самой низкой частоте. Каждый регулятор/мешалка также должны быть как можно больше по отношению к общему размеру камеры в этом одном измерении и должны составлять не менее трех четвертей наименьшего размера камеры. Кроме того, каждый регулятор/мешалка должны иметь асимметричную форму, т.е. такую, чтобы за один оборот регулятора/мешалки получался неповторяющийся рисунок поля;
- антенны, генерирующие поле (см. приложение B): логопериодическая или другая хорошо подобранная антенна, способная удовлетворять требованиям по частоте и мощности и избегать прямого воздействия на испытательный объем;
- эталонные антенны для измерения напряженности поля (см. приложение B): логопериодическая или другая линейно поляризованная, хорошо согласованная антенная система, способная удовлетворять требованиям к частоте;
- датчик для контроля напряженности изотропного поля (см. приложение B): способен контролировать электрическое поле вдоль всех трех ортогональных осей. Любая схема головки датчика и опто-электроника должны обладать достаточной устойчивостью к измеряемой напряженности поля и иметь волоконно-оптическую связь с индикатором вне камеры. Также может быть использована надлежащим образом отфильтрованная линия.
Примечание 1 - Для реверберационных камер требуется датчик поля, который позволяет измерять электрическое поле индивидуально по всем трем ортогональным осям. Если используется небольшая штыревая антенна, то ее следует переместить, чтобы измерять каждую составляющую поля отдельно в разных направлениях;
- антенна для контроля напряженности поля, представляющая собой небольшую (калиброванную) дипольную антенну (т.е. менее  ); может быть заменена датчиком, при условии, что антенна расположена в трех некомпланарных ориентациях (предпочтительно взаимно перпендикулярных) для каждого места измерения. Следует позаботиться о поддержании баланса этой антенны по отношению к ее питающему кабелю;
); может быть заменена датчиком, при условии, что антенна расположена в трех некомпланарных ориентациях (предпочтительно взаимно перпендикулярных) для каждого места измерения. Следует позаботиться о поддержании баланса этой антенны по отношению к ее питающему кабелю;
- фильтры электромагнитных помех: следует позаботиться о том, чтобы фильтры не создавали дополнительных резонансных эффектов на подключенных линиях;
- генератор (или генераторы) радиочастотного сигнала, который способен охватывать интересующую полосу частот и, при использовании для испытания на помехоустойчивость, может быть амплитудно модулирован синусоидальной волной 1 кГц на глубину 80%. Он должен либо иметь возможность автоматической развертки, либо, в случае радиочастотных синтезаторов, быть способен программироваться с зависящими от частоты ступенями и временем выдержки. Он также должен быть способен устанавливаться вручную.
Примечание 2 - Комитеты по продуктам могут выбирать альтернативные схемы модуляции.
Использование низкочастотных или полосовых фильтров может быть необходимым, чтобы избежать проблем, вызванных гармониками в оборудовании, которое предназначено для приема сигналов в целях мониторинга;
- усилители мощности для усиления сигнала (немодулированного и модулируемого) и обеспечения подачи мощности на антенны для создания необходимого уровня поля. Гармоники и искажения, создаваемые усилителем мощности, должны быть на уровне, меньшем или равном 15 дБ ниже уровня несущей.
Предупреждение - При испытаниях в реверберационной камере присутствуют высокие отражения, может потребоваться защита усилителя от несоответствия импеданса;
- соответствующее оборудование для регистрации уровней мощности, необходимых для определения норм радиопомех или напряженности поля, и для контроля генерации этого уровня для проведения испытаний. Для контроля подаваемой мощности можно использовать направленный ответвитель.
Примечание 3 - Любая спецификация типа используемого приемника (например, приемник электромагнитных помех, указанный в CISPR) должна быть определена соответствующим комитетом по продуктам.
Необходимо позаботиться о том, чтобы обеспечить надлежащую помехоустойчивость вспомогательного оборудования.
После первоначальной сборки камеры или после любой серьезной модификации проводится проверка однородности поля, чтобы подтвердить адекватные характеристики реверберационной камеры в соответствии с приложением B. Эта процедура может быть использована для определения самой низкой используемой частоты (LUF) применяемой камеры. Процедура проверки однородности поля камеры выполняется в испытательном/рабочем объеме, который включает расположение испытательного стенда и испытуемого оборудования (ИО) внутри реверберационной камеры. Проверка камеры касается только работы камеры в режиме регулятора (т.е. пошагового вращения регулятора), в то время как работа в режиме перемешивания (непрерывное вращение регулятора) рассматривается отдельно в приложении C. Измерение однородности поля следует проводить при извлечении из камеры всего вспомогательного оборудования (включая испытательный стенд). Проверка должна проводиться в 8 местах, расположенных на достаточном расстоянии друг от друга, для трех взаимно ортогональных осей (x, y, z) в каждом месте испытаний, т.е. всего 24 значения измерений на частоту (см. B.1.2). Поле внутри камеры считается однородным, если стандартное отклонение находится в пределах 3 дБ при частоте выше 400 МГц, 4 дБ при частоте 100 МГц, линейно уменьшается до 3 дБ при частоте 400 МГц и находится в пределах 4 дБ при частоте ниже 100 МГц.
Методика проверки требует использования линейных/пассивных антенн мониторинга поля во время проведения испытаний ИО. Антенны откалиброваны по трехосному датчику электрического поля (откалиброваны в безэховой среде, например, в соответствии с IEC 61000-4-3 (приложение I), действительны для проверки камеры). Цель этого аспекта процедуры состоит в том, чтобы обеспечить непрерывный мониторинг поля во время испытания с помощью антенны и связанного с ней контрольного оборудования с быстрым временем отклика.
Примечание 1 - Динамический диапазон, в котором датчик поля должен демонстрировать линейный отклик, значительно больше в реверберационной камере, чем в других испытательных установках. Это связано с резонансной природой его внутреннего поля, которое вызывает большие колебания напряженности поля в любой точке внутри рабочего объема в зависимости от угла поворота регулятора/мешалки, обычно на 30 дБ или более.
Примечание 2 - Линейность датчика, который используется для проверки камеры, должна находиться в пределах +/- 0,5 дБ от идеальной линейной характеристики в диапазоне (-6 дБ, +10 дБ) относительно средней напряженности поля. Асимметрия этого интервала обусловлена соответствующей асимметрией функции плотности вероятности напряженности поля внутри реверберационной камеры, что способствует повышению напряженности поля. Для мониторинга в полевых условиях во время проведения испытаний на помехоустойчивость этот диапазон применяется по отношению к среднему значению максимальной напряженности поля.
Предупреждение - Особой проблемой при использовании датчиков поля является чувствительность подключенной электроники управления датчиком (измерительного блока) к локальной напряженности поля внутри реверберационной камеры. Высокие значения локальной напряженности поля могут привести к неисправности или неточному измерению значений датчиком. Это требует выполнения калибровки датчика путем воздействия на весь измерительный блок датчика (а не только на его сенсорные элементы) ожидаемой максимальной напряженности поля в камере во время проверки камеры и/или проведения испытаний.
Кроме того, выполняется проверка влияния нагрузки камеры на однородность поля (см. B.1.6), чтобы определить максимально допустимую нагрузку камеры для будущих испытаний.
Перед началом каждого испытания с испытательным стендом и испытуемым оборудованием, установленными в камере, выполняется следующая процедура:
- измерение эффективности камеры "быстрой проверкой" производится с помощью испытуемого оборудования и испытательного стенда, установленного в камере (см. раздел B.2). Цель этого испытания - подтвердить, что нагрузка камеры меньше, чем при первоначальной проверке камеры;
- расчеты, основанные на проверочных измерениях, используются для определения минимальной длительности импульса (см. раздел B.3), которая может поддерживаться в данной камере для проведения испытаний с импульсной модуляцией.
Примечание 3 - Проверка камеры, подробно описанная в разделе B.1, должна проводиться только для первоначальной конструкции камеры и после существенной модификации камеры. Проверка максимальной нагрузки камеры (см. A.5.4, B.1.5) должна проводиться только после первоначальной сборки камеры или после существенных модификаций реверберационной камеры. Изменения в регуляторах/мешалках считаются существенными модификациями, если изменения приводят к снижению эффективности регулятора, как указано в разделе A.3.
Испытательная установка и процедуры испытаний зависят от типа выполняемого испытания. Чтобы определить требования к испытаниям для конкретного испытания, необходимо обратиться к приложению, которое относится к типу проводимого испытания.
Обратитесь к приложению, которое относится к желаемому типу методики испытаний (например, режим регулировки или режим перемешивания). Для получения указаний относительно применимости настроенного режима в сравнении с режимом перемешивания обратитесь к приложениям A и C.
Испытания должны проводиться в соответствии с планом испытаний, который должен быть включен в протокол испытаний.
Результаты испытаний и требования к протоколу зависят от типа выполняемого испытания.
Обратитесь к приложению, относящемуся к типу проводимого испытания, чтобы определить, что необходимо включить в протокол испытания.
Если в плане испытаний не указано иное, испытания должны проводиться в стандартных климатических условиях в соответствии с IEC 60068-1.
Примечание - Генерация высокой напряженности поля может привести к значительному локальному нагреву или образованию дуги в крайних случаях.
(справочное)
A.1 Предварительные замечания
A.1.1 Общие положения
Исследования электромагнитных реверберационных камер проводились более 50 лет [1] - [5] <4> (обзоры см. в [6] - [8]) и позволили лучше понять методы работы и анализа [8] - [11]. В то время как первоначальное внимание этого исследования было сосредоточено на измерении электромагнитного поглощения материалов [1] - [3], область применения расширилась, включив излучение [4], [30], испытание чувствительности электронного оборудования [5], [30], испытания на помехоустойчивость, а также эффективность экранирования кабелей, разъемов и корпусов [31]. Реверберационные камеры также могут быть использованы для определения характеристик антенны и параметров распространения.
--------------------------------
<4> Цифры в скобках относятся к разделу A.6 "Справочные документы" в конце этого приложения.
A.1.2 Размер, форма, конструкция и эксплуатация камеры
Реверберационная камера представляет собой электрически крупную, высокопроводящую полость или камеру, снабженную механизмом для изменения (перемешивания) ее мод для выполнения электромагнитных (ЭМ) измерений (как излучаемых радиопомех, так и помехоустойчивости) на электронном оборудовании. Любое устройство, которое соответствует этому описанию, можно рассматривать как реверберационную камеру (также называемую камерой с режимом перемешивания или реверберационной камерой с режимом регулировки/перемешивания или полостью с режимом перемешивания).
Однако, возможно, потребуется выполнить другие условия, прежде чем такой объект можно будет использовать с приемлемо низкой неопределенностью.
В общем случае реверберационная камера представляет собой экранирующий корпус, наименьший размер которого велик по отношению к длине волны на самой низкой используемой частоте (LUF, см. A.1.3). Он также должен быть достаточно большим для размещения испытуемого оборудования, мешалок и измерительных антенн. Камера обычно оснащена устройством механической регулировки/перемешивания, размеры которого составляют значительную долю от размеров камеры и длины волны в LUF (см. A.1.4). Когда камера возбуждается радиочастотной энергией, результирующая многорежимная электромагнитная среда может быть "перемешана" механическим регулятором/мешалкой. Результирующее поле является статистически однородным, статистически изотропным (т.е. энергия поступает со всех сторон) и статистически случайным образом поляризованным (т.е. со всеми возможными направлениями поляризации) при усреднении по достаточному числу положений регулятора/мешалки. Под достаточным числом подразумевается количество шагов регулятора, которое требуется для достижения заданной однородности поля.
Определять испытательную камеру минимального размера непрактично, и предоставление подробных указаний по проектированию выходит за рамки настоящего стандарта. Критическим фактором является то, что если камера соответствует процедуре проверки (см. B.1.2), то это демонстрирует, что она обеспечивает требуемую электромагнитную среду при желаемом уровне статистической достоверности.
Все измерения мощности обычно производятся относительно разъема антенны. Следовательно, входная мощность камеры PInput принимается за прямую мощность, подаваемую на антенные разъемы. В некоторых случаях необходимо учитывать отраженную мощность, вызванную рассогласованием между антенной и источником подаваемой мощности. В таких случаях входная мощность должна быть полезной входной мощностью, которая равна (в линейных единицах, например в Вт):
PNet = PForward - PReflected. (A.1)
Размер камеры, форма, коэффициент полезного действия и эффективность механического регулятора/мешалки определяют самую низкую используемую частоту (LUF). LUF обычно определяется как частота, с которой камера соответствует эксплуатационным требованиям. На практике, в соответствии с критериями, изложенными в настоящем стандарте, это обычно происходит на частоте, немного превышающей частоту, которая равна трехкратному первому резонансу камеры. Для процедуры, описанной в настоящем стандарте, LUF - это самая низкая частота, при которой может быть достигнута заданная однородность поля в объеме, ограниченном восемью угловыми точками.
Фактор качества - это мера способности камеры или резонатора накапливать энергию относительно скорости ее рассеивания. Способность камеры накапливать энергию определяется частотой, объемом (и, в меньшей степени, формой) и электромагнитными потерями, присутствующими в камере. Основной механизм потерь в пустой камере (т.е. без ИО на месте) обусловлен стенками камеры и антеннами. Другие потери могут возникнуть в результате утечки через непреднамеренные отверстия или преднамеренной нагрузки. Чем выше проводимость материалов, используемых для изготовления стенок камеры, и чем меньше отверстия, тем ниже потери в камере. Такие материалы, как серебро, медь и алюминиевый лист, обладают самой высокой проводимостью и, следовательно, самыми низкими омическими потерями. Также распространены другие материалы, такие как голая или окрашенная сталь или оцинкованный лист. Для миниатюрных микроволновых резонаторов можно использовать сверхпроводящие материалы при низких температурах, если требуются исключительно высокие значения Q.
Однако медный и алюминиевый экран и огнезащитный аэрозоль имеют большую площадь поверхности и не приводят к высокой Q окружающей среды. Дополнительные потери, такие как антенны, опорные конструкции и испытуемое оборудование (ИО), также могут повлиять на общую добротность камеры.
Вклад омических потерь в антенне часто достаточно мал, чтобы быть пренебрежимо малым, как в этом пункте (см. также приложение I). Мощность, необходимая для создания определенного поля внутри камеры, может быть определена с помощью процедуры проверки пустой камеры, описанной в приложении B. Однако ИО, необходимое вспомогательное оборудование или любой присутствующий поглощающий материал могут нагружать камеру, уменьшать Q камеры и, следовательно, уменьшать испытательные поля при той же входной мощности. Следовательно, поля в нагруженной камере должны контролироваться, и при необходимости входная мощность должна быть увеличена, чтобы компенсировать эту нагрузку, как описано в разделе B.2 (7).
A.1.5 Рекомендации по регулировке/перемешиванию
Существуют методы, отличные от использования механических регуляторов/мешалок, которые также могут обеспечить статистически однородную и статистически изотропную среду. Примеры включают гибкие стены или движущиеся границы, движущиеся передающие или приемные антенны или ИО и изменение частоты в некоторой полосе пропускания (однотональное изменение частоты (сканирование) или шумовое возбуждение с ограниченной полосой пропускания) или их комбинацию. Хотя эти методы могут обеспечить достоверные испытания, настоящий стандарт предполагает, что камера оснащена по меньшей мере одним вращающимся регулятором/мешалкой.
Некоторые из этих альтернативных методов перемешивания могут быть неприменимы к определенным испытаниям на электромагнитную совместимость, например, частотное перемешивание не может использоваться при испытаниях на излучаемые радиопомехи. Комбинированное использование различных методов перемешивания (так называемое гибридное перемешивание) может способствовать достижению меньших неопределенностей в данной камере или обеспечению возможности использования камер меньшего размера для заданного уровня неопределенности.
Регуляторы/мешалки должны быть достаточными для обеспечения желаемой однородности поля. Следует избегать симметрии в конструкции и размещении мешалки, чтобы максимально увеличить количество независимых положений, которые она может генерировать. Метод оценки эффективности регулятора/мешалки приведен в разделе A.3.
В некоторых камерах может потребоваться использование нескольких регуляторов/мешалок для получения желаемой однородности поля на требуемых частотах.
Рекомендуются шаговые двигатели или серводвигатели, оснащенные энкодером с компьютерным управлением.
Двигатели непрерывного действия с регулируемой частотой вращения с ременным приводом приемлемы, но время отклика ИО должно быть быстрым относительно скорости регулятора/мешалки, чтобы этот вариант был жизнеспособным, и определение положения лопастного колеса может быть менее точным или воспроизводимым. Во время ввода камеры в эксплуатацию следует провести проверку на возможные электромагнитные помехи от двигателя.
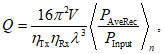
В прошлом испытание проводилось с использованием фиксированного количества выборок или шагов регулятора (обычно 200) на всех интересующих частотах [5]. Это привело к неопределенности (т.е. статистической неоднородности и анизотропии) поля, которое изменялось в зависимости от частоты из-за увеличения модальной плотности (см. A.2.1) на более высоких частотах. В данном случае неопределенность для типичной камеры значительно варьировалась в зависимости от частоты, как показано на рисунке A.1.
для 200 независимых шагов регулятора
В настоящем стандарте процедура оптимизирует количество шагов или выборок для получения заданного уровня неопределенности (т.е. стандартного отклонения однородности поля, указанного тут в терминах измеренного максимального поля) в зависимости от частоты. Это позволяет уменьшать количество выборок с увеличением частоты. Эта процедура обеспечивает точный и экономичный метод проверки реверберационных камер. Это позволяет оператору регулировать количество генерируемых шагов регулятора для получения желаемого уровня неопределенности, а также максимизировать способность камеры генерировать более высокие поля за счет увеличения количества шагов регулятора, насколько это возможно.
A.1.6 Общие замечания по проверке камеры
Процедура проверки предъявляет строгие требования к усредненным по времени (т.е. по всей группе) полям [9], [10], [16], генерируемым в пределах испытательного объема, чтобы они были однородными в пределах заданной неопределенности. Чтобы обеспечить это, требуется три измерения в каждом из восьми местоположений для трех взаимно перпендикулярных ориентаций. Каждое измерение является независимым, что приводит в общей сложности к 24 измерениям на частоту. Камера, прошедшая процедуру проверки, продемонстрирует свою способность генерировать требуемую однородность поля в пределах принятого уровня неопределенности.
A.1.7 Прокладка кабеля
Как правило, для кабелей, подключенных к испытуемому оборудованию, результаты испытаний нечувствительны к расположению кабелей из-за статистической однородности поля. Конкретные указания по прокладке кабелей, где это необходимо, приведены в соответствующих приложениях.
Мода резонатора (также известная как собственная мода или естественная мода), как определено в 3.1.12, представляет собой конкретное распределение поля, генерируемое стоячими волнами. Моды в полости определяются граничными условиями (формой и размерами резонатора и мешалкой мод). Для идеального, без потерь, пустого, закрытого прямоугольного резонатора с размерами L (длина), W (ширина) и H (высота) модальные или резонансные частоты Fl,m,n, МГц, могут быть показаны как
Fl,m,n = 150((l/L)2 + (m/W)2 + (n/H)2)0,5, (A.2)
где l, m, n - индексы мод (по крайней мере, два из которых отличны от нуля);
L, W и H - размеры камеры, м.
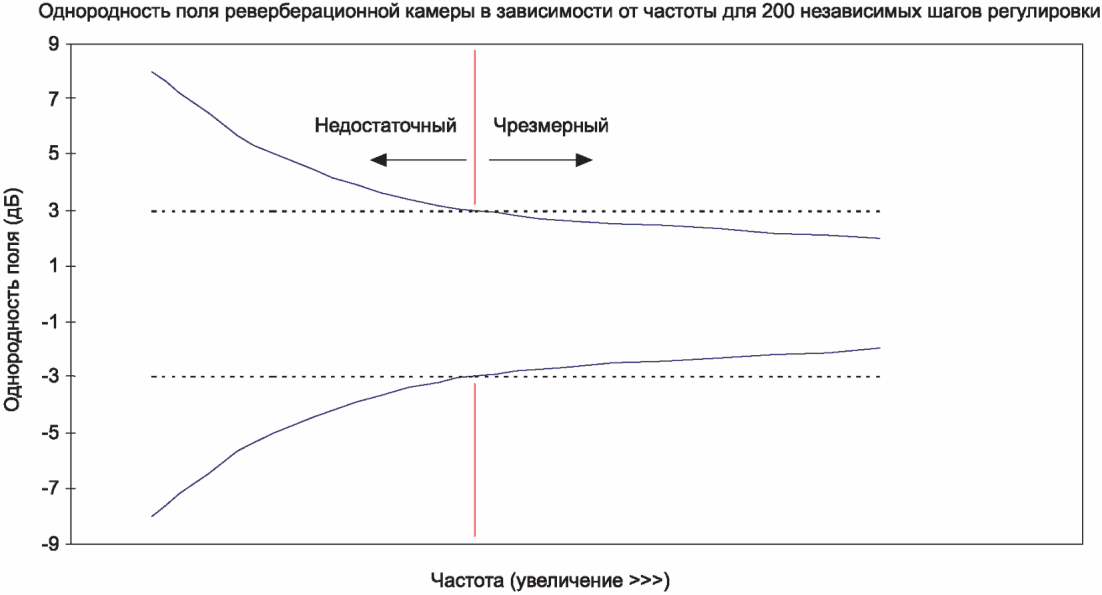
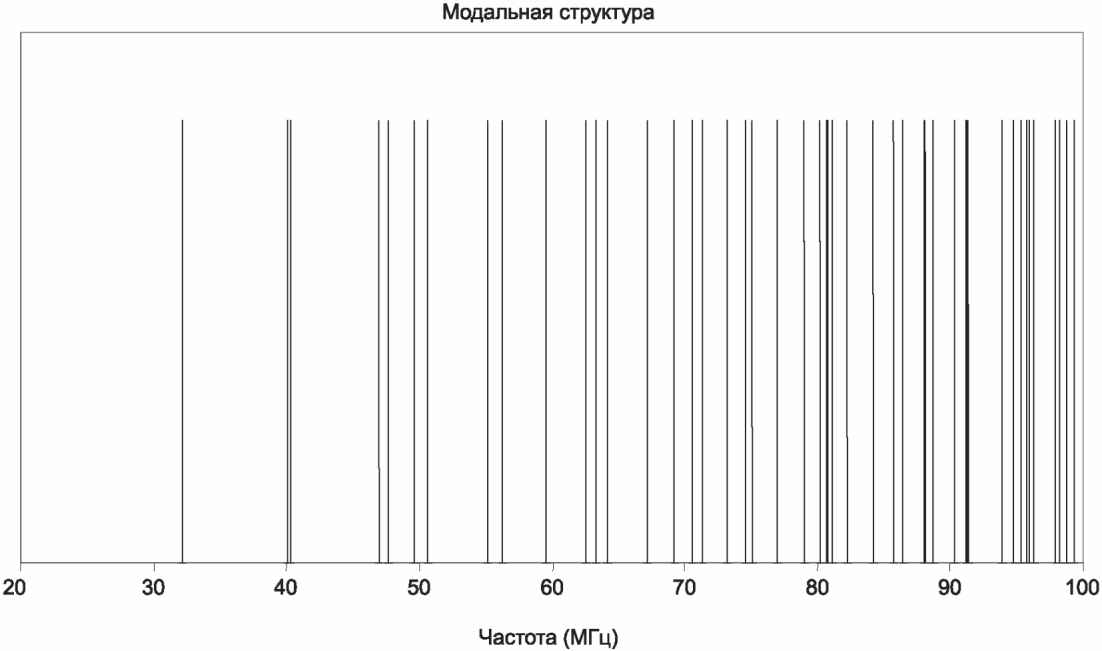
На рисунке A.2 показано теоретическое распределение режима в зависимости от частоты для прямоугольной камеры размером 10,8 x 5,2 x 3,9 м (Д x Ш x В). Каждый режим представляет собой уникальное изменение пространственного поля (модальную структуру) в зависимости от местоположения по всей полости. Самая низкая резонансная частота этой камеры (F1,1,0) приходится на частоту 32,096 МГц. Любые потери, как правило, незначительно уменьшают резонансные частоты. Каждая мода имеет свой собственный модальный Q-фактор Ql,m,n. Значения модальной добротности Q увеличиваются приблизительно с корнем квадратным из частоты. "Эффективная" добротность Q резонатора с высшими модами может быть определена как средневзвешенное значение по возбужденным модам [28]. Полоса пропускания фактора качества BWQ резонатора определяется как Fl,m,n/Q на уровне 3 дБ для резонансной характеристики второго порядка. Типичный BWQ показан на F4,2,2 (60-я мода) на рисунке A.3. В этом случае возбуждается только несколько мод, когда резонатор приводится в действие источником постоянной волны на F4,2,2.
Примечание - Вертикальная ось не имеет другого значения, кроме представления наличия моды.
размером 10,8 x 5,2 x 3,9 м
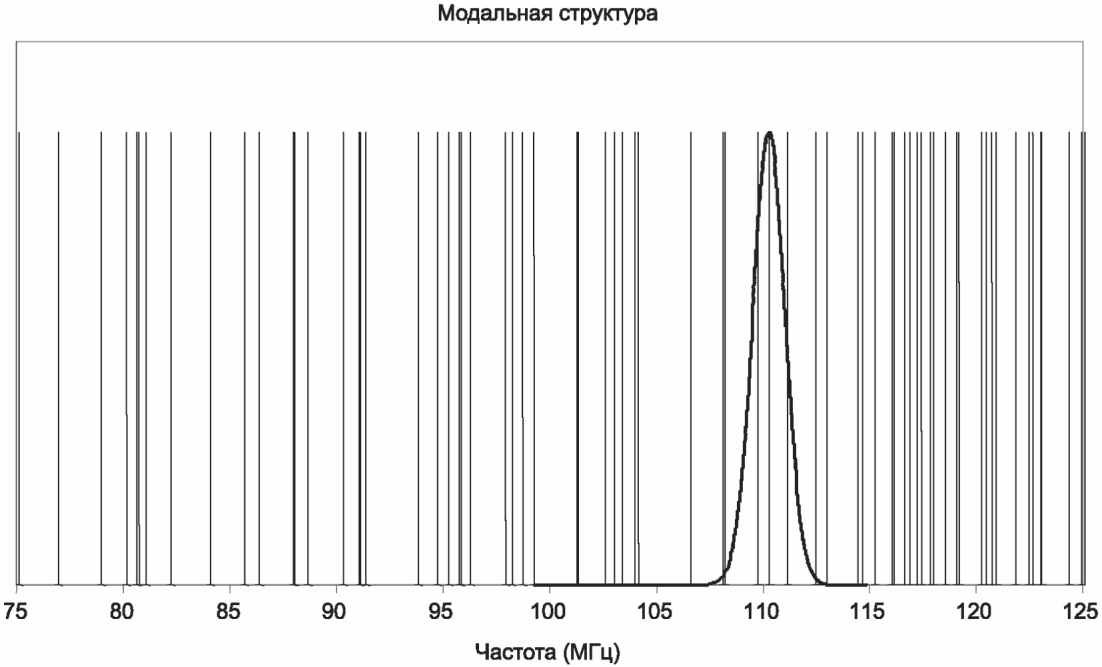
Q-полосой пропускания (высокая Q), наложенная на 60-ю моду
На рисунке A.4 показан эффект уменьшения Q резонатора (см. A.1.3 и A.5.7). В этом случае дополнительные моды могут возбуждаться, когда резонатор приводится в действие на частоте 60-й моды из-за модального перекрытия вследствие меньшей добротности и меньшего интервала частот. Эффективная модальная структура представляет собой векторную сумму возбужденных мод, взвешенных с различными амплитудами.
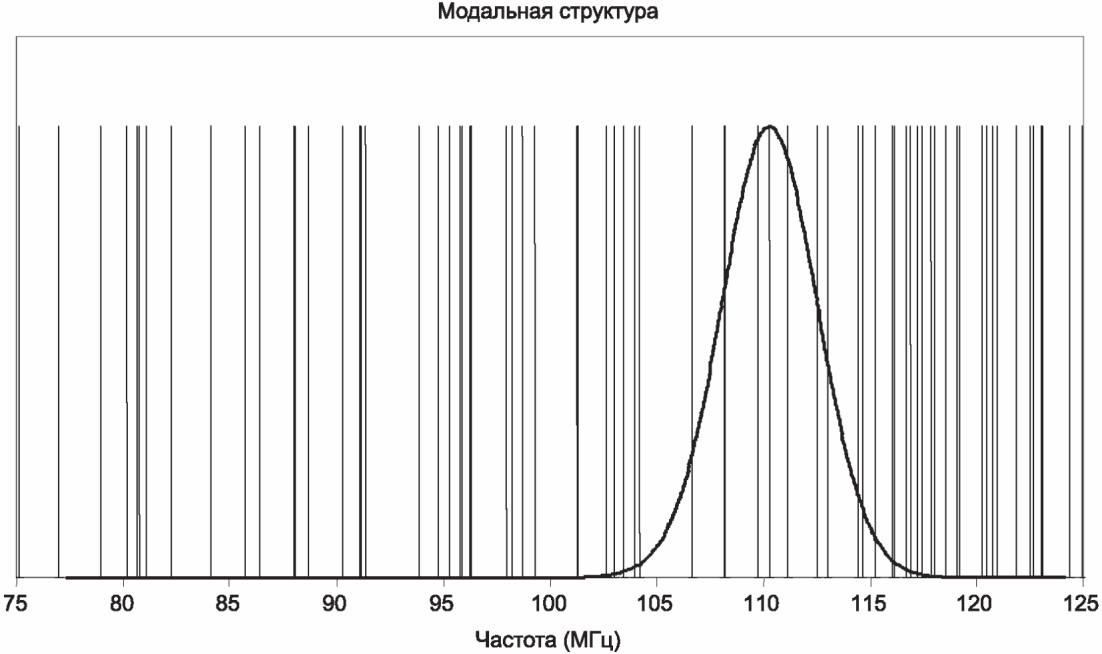
Q-полосой пропускания (низкая Q), наложенная на 60-ю моду
Изменение пространственного поля теперь будет отличаться от того, которое получается при использовании резонатора с более высокой Q.
Таким образом, изменение Q резонатора может изменить "эффективную" модальную структуру. Обратите внимание, что если бы частота была увеличена, то в пределах заданного BWQ было бы доступно больше мод, что привело бы к более тонкой структуре поля. Кроме того, эффективная модальная структура была бы векторной суммой мод.
Рисунки A.3 и A.4 показывают, что на более низких частотах модальная заселенность камеры разрежена и имеет частотные промежутки разного размера (спектрально неоднородные). Рисунки также показывают, что с увеличением частоты количество и плотность мод в среднем увеличиваются (пропорционально f3 и f2 соответственно). Эффективная модальная структура в сочетании со способностью регулятора изменять граничные условия камеры определяет, насколько хорошо будет работать реверберационная камера.
Примечание - Камера может иметь произвольную геометрию. Однако некоторые формы, такие как сферические и круглоцилиндрические, обычно не используются для реверберационных камер, поскольку изогнутые поверхности могут создавать каустики (фокусировку лучей), которые затрудняют получение однородности пространственного поля, если только они не снабжены дифракторами достаточно большого размера относительно длины волны [12], [13] или если избегать фокальной области.
Эффективная модальная структура зависит как от плотности мод, так и от фактора качества полосы пропускания на интересующей частоте. Плотность мод на частоте f равна  . Для первого порядка по частоте значение m не зависит от формы полости [11].
. Для первого порядка по частоте значение m не зависит от формы полости [11].
. Для первого порядка по частоте значение m не зависит от формы полости [11].Однако поправки второго порядка, которые зависят от кривизны поверхностей и длины кромок и стыков [12], могут стать значительными на более низких частотах. Количество мод M, возбуждаемых в BWQ на частоте f, может быть оценено как
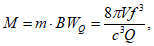
где f - частота, Гц;
c - скорость света в свободном пространстве, приблизительно 3·108 м/с;
V - объем полости, м3;
Q - фактор качества (безразмерный) на частоте f.
В более общем плане количество мод в пределах полосы пропускания приемника  для широкополосного сигнала возбуждения без постоянной волны (например, импульсного) может быть оценено как
для широкополосного сигнала возбуждения без постоянной волны (например, импульсного) может быть оценено как  , где
, где  .
.
.Теория предполагает, что состояние "с высшими модами" существует, когда возбуждается достаточно большое количество мод. В идеальном состоянии "с высшими модами" и при условии достаточно эффективного процесса перемешивания распределение мощности в любом месте соответствует распределению хи в квадрате  , а напряженность поля соответствует распределению хи
, а напряженность поля соответствует распределению хи  [10], [11], [23]. Оба распределения заметно асимметричны относительно своего среднего значения (сильно смещены вправо). При более низких (конечных) плотностях мод, т.е. на более низких частотах, распределение принятой мощности больше не соответствует распределению
[10], [11], [23]. Оба распределения заметно асимметричны относительно своего среднего значения (сильно смещены вправо). При более низких (конечных) плотностях мод, т.е. на более низких частотах, распределение принятой мощности больше не соответствует распределению  , а вместо этого является более сложным распределением [14], [15]. Кроме того, различные распределения и статистика применимы к полям, близким к границе проводимости, относящимся к напольным или настенным устройствам [16] - [18], или к распределениям эмпирической выборки, когда количество сгенерированных позиций регулятора n (см. раздел A.3) относительно невелико, обычно, когда n < 30 [27]. Эти различия в распределении полей увеличивают неопределенность и ширину доверительных интервалов измеряемого поля.
, а вместо этого является более сложным распределением [14], [15]. Кроме того, различные распределения и статистика применимы к полям, близким к границе проводимости, относящимся к напольным или настенным устройствам [16] - [18], или к распределениям эмпирической выборки, когда количество сгенерированных позиций регулятора n (см. раздел A.3) относительно невелико, обычно, когда n < 30 [27]. Эти различия в распределении полей увеличивают неопределенность и ширину доверительных интервалов измеряемого поля.
Они также влияют на среднюю максимальную или минимальную напряженность поля и ее доверительные интервалы.
Чтобы применить статистику к данным, полученным из реверберационной камеры, должно быть известно количество независимых выборок. Для заданной частоты регулятор (или несколько регуляторов) должен изменять граничные условия в достаточной степени, чтобы вызвать статистически значимое изменение структуры поля камеры. Как только такое изменение произошло в структуре поля, любые выборки, полученные из полей, возникающих в результате новой позиции регулятора, считаются статистически независимыми от выборок предыдущей позиции регулятора. Данные об эффективности регулятора должны быть получены для определения количества статистически независимых выборок, которые данный регулятор (или регуляторы) может обеспечить на желаемой частоте. Данные об эффективности регулятора получаются путем записи принятой мощности с n угловых интервалов, равномерно распределенных за один оборот регулятора.
Затем эффективность регулятора может быть оценена путем вычисления коэффициента корреляции между шагами регулятора [20]. Коэффициенты корреляции для кратных единичному шагу регулятора объединяются с функцией автокорреляции относительно размера шага регулятора. Типичный расчет коэффициента корреляции включает последовательное смещение вектора данных x на одну выборку для каждого шага регулятора для получения y, как показано ниже, предполагая, что общий набор из 450 выборок:
D1, D2, D3, D4, D5, D6, ................................, D450
D450, D1, D2, D3, D4, D5, D6, .........................., D449
D449, D450, D1, D2, D3, D4, D5, D6, ...................., D448
D448, D449, D450, D1, D2, D3, D4, D5, D6, .............., D447
Затем коэффициент корреляции r может быть рассчитан по следующему уравнению:
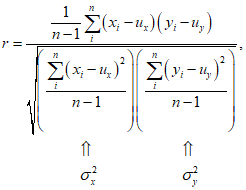 (A.4)
(A.4)в котором yi совпадает с xi, но смещается на одну выборку для каждого шага регулятора, а n - количество выборок, взятых за один оборот регулятора.
Примечание 1 -
- xi и yi - полученные значения мощности. Использование напряженности поля или синфазных, или квадратурных значений поля вместо мощности обычно дает аналогичные, но немного отличающиеся значения r;
- ux и uy - это среднее значение исходной принятой мощности в зависимости от набора данных о положении регулятора.
Поскольку распределение для y такое же, как и для x, из этого следует, что uy = ux и  . Коэффициент корреляции r может быть рассчитан с использованием функции корреляции, встроенной в большинство электронных таблиц, на основе исходного набора данных и сдвинутого набора данных. По соглашению в настоящем стандарте данные считаются некоррелированными, когда величина коэффициента корреляции для возрастающих сдвигов падает ниже и остается меньше значения
. Коэффициент корреляции r может быть рассчитан с использованием функции корреляции, встроенной в большинство электронных таблиц, на основе исходного набора данных и сдвинутого набора данных. По соглашению в настоящем стандарте данные считаются некоррелированными, когда величина коэффициента корреляции для возрастающих сдвигов падает ниже и остается меньше значения  . Другие критерии или пороговые значения иногда используются в других приложениях. Из-за статистической природы коэффициента корреляции это пороговое значение допустимо только в случае бесконечного n.
. Другие критерии или пороговые значения иногда используются в других приложениях. Из-за статистической природы коэффициента корреляции это пороговое значение допустимо только в случае бесконечного n.
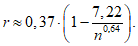
. Коэффициент корреляции r может быть рассчитан с использованием функции корреляции, встроенной в большинство электронных таблиц, на основе исходного набора данных и сдвинутого набора данных. По соглашению в настоящем стандарте данные считаются некоррелированными, когда величина коэффициента корреляции для возрастающих сдвигов падает ниже и остается меньше значения . Другие критерии или пороговые значения иногда используются в других приложениях. Из-за статистической природы коэффициента корреляции это пороговое значение допустимо только в случае бесконечного n.Для любого заданного конечного n и уровня достоверности предел должен быть снижен [21]. Например, для 95%-ной достоверности и значений n не менее 100 пороговое значение коэффициента корреляции может быть аппроксимировано уравнением
Разделив общее количество выборок за один полный оборот (например, более 450) на количество шагов, необходимых для уменьшения коэффициента корреляции до менее чем 0,37 (так называемое прореживание), получаем оценку количества независимых выборок, которые регулятор может обеспечить на определенной частоте.
Пример - Выполните описанную выше процедуру для камеры, повернув механический регулятор на 360° с шагом 450 равномерно распределенных шагов на частотах 80, 100 и 500 МГц. Если r становится меньше чем 0,37 x (1 - 7,22/4500,64) = 0,32 после 25, 15 и 5 шагов регулятора соответственно, можно ожидать, что регулятор выдаст 18 независимых выборок на частоте 80 МГц, 30 независимых выборок на частоте 100 МГц и 90 независимых выборок на частоте 500 МГц. Как показано в разделе A.4, количество требуемых шагов регулятора может превышать возможности одного регулятора обеспечить их. В этих случаях потребуется второй регулятор, но этого не обязательно достаточно.
Примечание 2 - Уравнение (A.5) было получено путем подгонки кривой к числовым данным [21].
Примечание 3 - Описанная выше процедура подразумевает использование равноудаленных положений регулятора. Известно, что это хорошо работает на достаточно высоких частотах и для одного регулятора. Для более чем одного регулятора невозможно определить равноудаленные позиции регулятора. Около LUF-камеры симметрия регулятора может стать актуальной. В этом случае не гарантируется, что равноудаленные позиции регулятора будут некоррелированными, и необходимо определить набор позиций регулятора, где корреляция каждой пары меньше указанного выше предела. Эта процедура также применима в случае более чем одного регулятора. Детали процедуры находятся на рассмотрении. Для неэквидистантных положений регулятора на низких частотах фактические положения, которые обеспечивают статистическую независимость, могут зависеть от расположения и ориентации антенн и, во время испытания, от размера и расположения испытуемого оборудования.
A.4.1 Флуктуации поля
Для последующего обсуждения предполагается, что размеры камеры велики по сравнению с длиной волны возбуждения (камера - "с высшими модами") и что камера имеет сложную геометрию. Внедрение антенн и эффективных регуляторов обеспечивает сложность в обычном резонаторе.
Процедура проверки для настоящего стандарта основана на статистической природе полей в сложных полостях. Экспериментально подтверждено, что флуктуирующие поля в реверберационной камере могут быть теоретически смоделированы с использованием соответствующих статистических распределений, например [9], [10], [14], [15] и [18], (1) для мощности, принимаемой антенной, которая связана со скалярной плотностью мощности камеры и с электрическим полем в квадрате (напряженность поля), (2) для максимальной принимаемой мощности или максимального электрического поля в квадрате, (3) для прямоугольной составляющей электрического поля и (4) для максимальной прямоугольной составляющей электрического поля. Эти четыре дистрибутива различны, но взаимосвязаны. Также доступны распределения для их выборки средних значений, стандартных отклонений и максимальных значений [19], а также для небольших наборов независимых выборок [27]. Несоответствие импеданса и другие проблемы, связанные с измерениями, дополнительно влияют на полевую статистику [19]. Некоторые специфические свойства некоторых распределений будут обсуждены ниже.
Функция реверберационной камеры заключается в создании статистически однородной (т.е. статистически изотропной, однородной и равномерно поляризованной) испытательной среды в пределах допустимой неопределенности и доверительных пределов. Это достигается с помощью механического регулятора, который используется для перераспределения (рассеивания) энергии поля. Регулятор изменяет граничные условия внутри камеры при ее перемещении или повороте. Как только регулятор перемещен в достаточное количество независимых положений, изменения поля, возникающие в результате поворота регулятора, обеспечивают набор значений поля, включающих множество направлений распространения и поляризации. В любом месте локальное поле демонстрирует большие и нерегулярные колебания во время вращения из-за различных уровней конструктивной или разрушительной интерференции отраженных волн (фазоров) от различных пространственных направлений падения и поляризации в этом месте. Величина и направленность полей в среднем одинаковы в пределах ограниченной неопределенности для всех точек внутри камеры. Термины "изотропный" и "однородный" часто используются для обозначения среды, создаваемой реверберационной камерой. Этот термин несколько вводит в заблуждение, поскольку поле или энергия в окружающей среде не проявляют одинаковой величины во всех направлениях и поляризациях одновременно, а плотность энергии не одинакова во всех местах одновременно, отсюда и прилагательное "статистический".
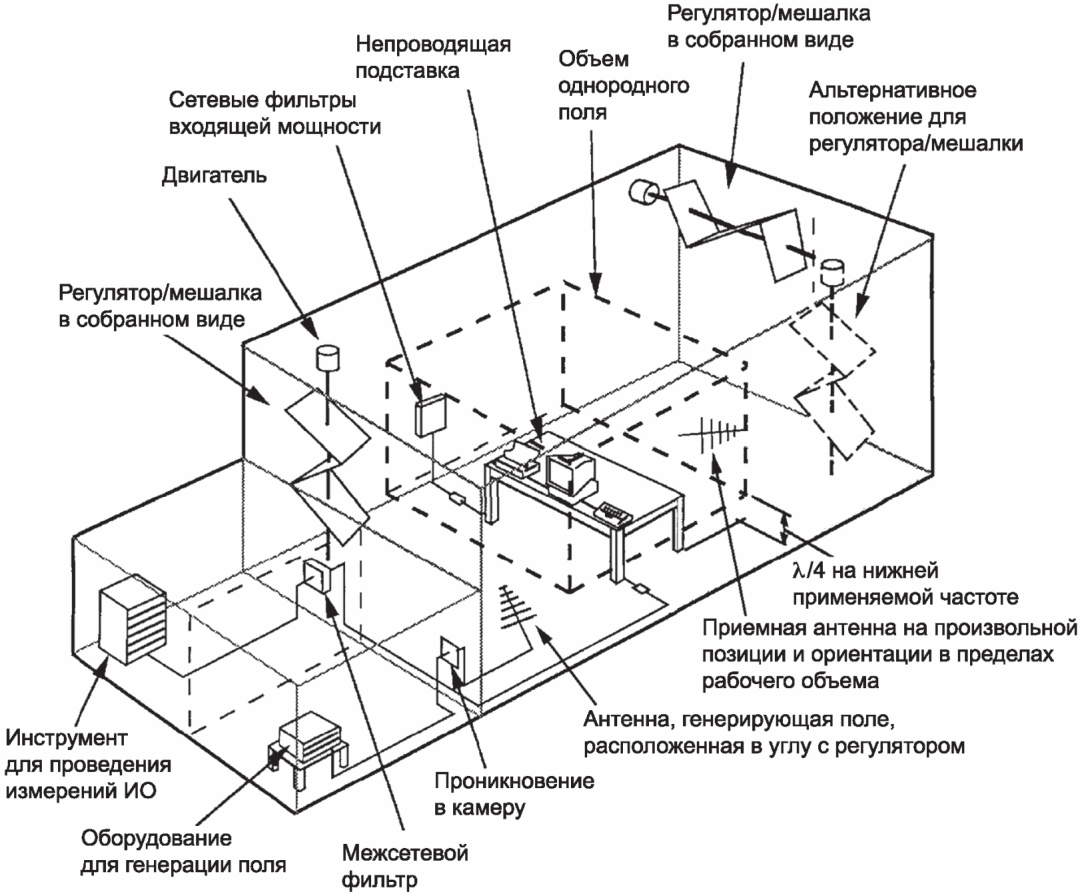
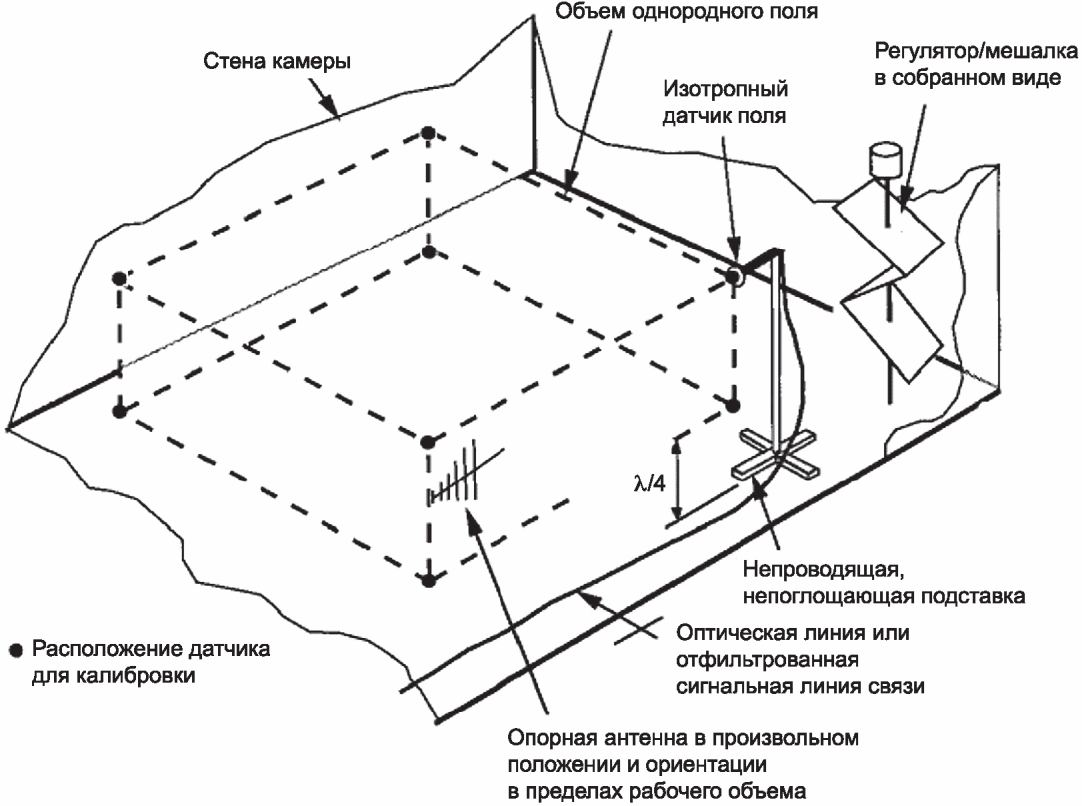
Обсуждение ограничено областями, входящими в рабочий объем камеры. Рабочий объем определяется точками или воображаемыми поверхностями на расстоянии  от стенок камеры и от любой антенны, регулятора или другого проводящего объекта при самой низкой частоте работы. Для камеры, работающей выше 100 МГц, расстояние составляет 0,75 м. Типичное устройство реверберационной камеры показано на рисунке A.5.
от стенок камеры и от любой антенны, регулятора или другого проводящего объекта при самой низкой частоте работы. Для камеры, работающей выше 100 МГц, расстояние составляет 0,75 м. Типичное устройство реверберационной камеры показано на рисунке A.5.
Учитывая распределение полей внутри полости, можно определить количество выборок, которые необходимо взять, чтобы определить уровень неопределенности для поля. На рисунке A.6 показан теоретический прогноз для количества независимых выборок (изменения граничных условий или шагов механических настроек), необходимых для получения погрешности поля 6 дБ при уровне достоверности 95% для конкретной полости с размерами, указанными на рисунке. Как показано на рисунке A.6, при меньшем количестве мод M, как определено уравнением (A.3), требуемое количество независимых выборок быстро увеличивается с уменьшением частоты. В этом расчете поле является "недомодным" и больше не подчиняется идеальному распределению хи, а подчиняется более сложному распределению [15], [27], определяемому дополнительным параметром, который зависит от максимально достижимого числа независимых позиций регулятора на выбранной частоте работы, которая, в свою очередь, зависит от формы и размера камеры. Если уровень достоверности понижен, то количество выборок, необходимых для получения того же уровня неопределенности, уменьшается. На практике механический регулятор может быть не способен обеспечить количество независимых выборок, требуемых для достижения желаемой эффективности в пределах данного резонатора. По этой причине эффективность регулятора должна быть оценена, как подробно описано в разделе A.3, чтобы определить количество выборок, которые могут быть предоставлены в данном резонаторе на данной частоте.
Моды/BWQ и требования к выборке для неопределенности поля
6 дБ с достоверностью 95%
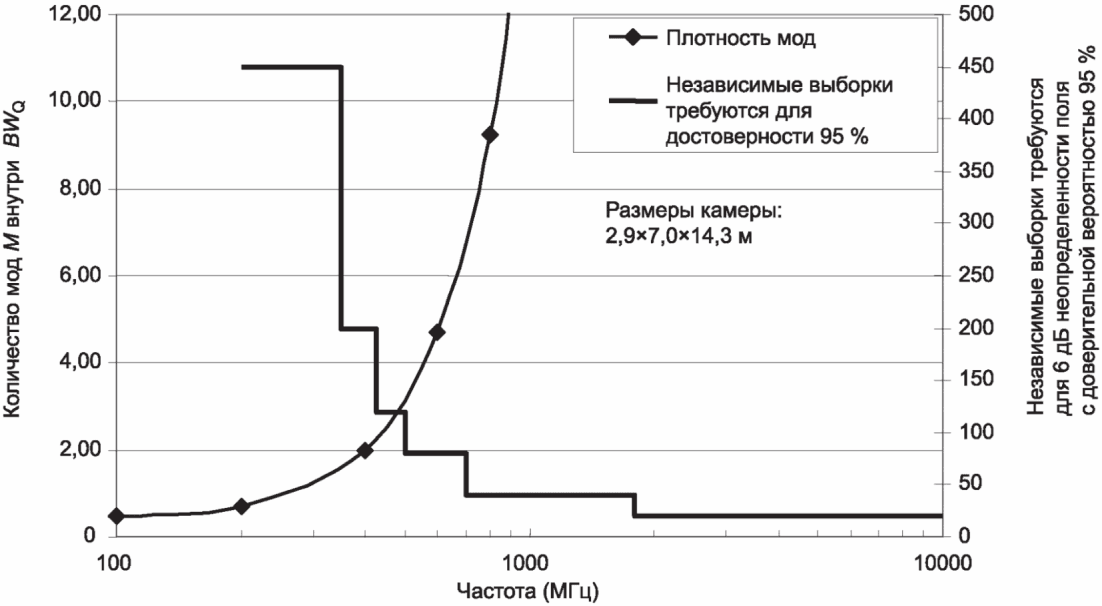
Примечание - См. уравнение (A.3) для расчета M.
для 95%-ной достоверности
Для идеальной реверберационной камеры объемное (т.е. пространственное) среднее значение поля для фиксированного граничного условия и среднее значение "всей группы" эквивалентны [9], [10], [16]. Среднее значение по всей группе - это среднее значение поля в фиксированном местоположении для нескольких граничных условий. Изменения граничных условий обычно достигаются вращением механического регулятора, но также могут происходить в результате изменений конфигурации объектов, таких как антенны, испытуемые устройства и вспомогательные приборы и оборудование.
На рисунке A.7 показана функция плотности вероятности (PDF) поля при местоположении внутри идеальной реверберационной камеры, нормированная по "истинному" объему или среднему значению по всей группе (ожидаемое значение). Как показано на этом рисунке, поле в камере в произвольном месте для фиксированного единичного граничного условия или при фиксированном единичном местоположении и произвольном граничном условии (положение регулятора) (N = 1) может изменяться более чем на 30 дБ.
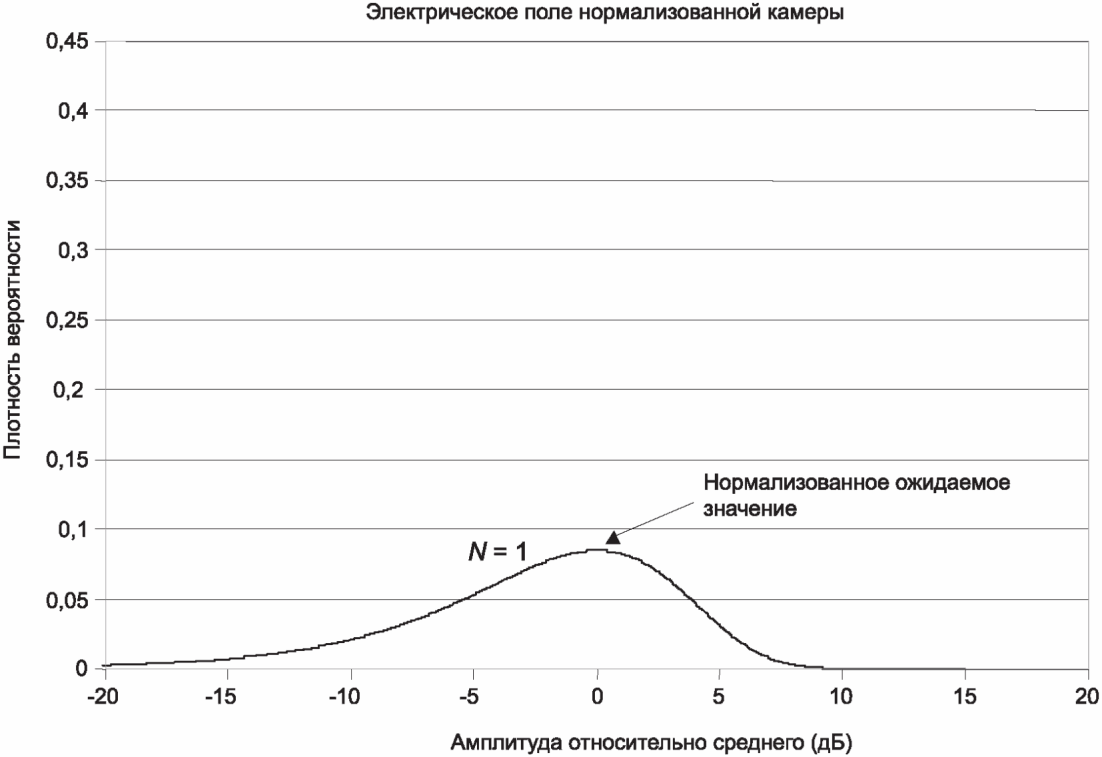
поля при фиксированном местоположении для измерения
с одной выборкой
На рисунке A.8 показано, что по мере увеличения числа независимых граничных условий (шагов регулятора) измеренное среднее значение поля камеры в любом заданном месте камеры сходится к "истинному" среднему значению по всей группе. Измеренное среднее значение - это "ожидаемое значение" нескольких выборок. Ширина каждой кривой является мерой разброса значений поля (интервал неопределенности), которое можно ожидать в произвольном месте в рабочем объеме для N выборок. Неопределенность среднего поля уменьшается как  [19]. На рисунке A.8 также показано, что для 12 шагов регулятора неопределенность среднего поля составляет около 5 дБ при 95%-ном доверительном интервале и около 2,4 дБ для 100 шагов регулятора. Это соответствовало бы восьмикратному увеличению времени испытаний для снижения неопределенности среднего уровня поля на 2,6 дБ.
[19]. На рисунке A.8 также показано, что для 12 шагов регулятора неопределенность среднего поля составляет около 5 дБ при 95%-ном доверительном интервале и около 2,4 дБ для 100 шагов регулятора. Это соответствовало бы восьмикратному увеличению времени испытаний для снижения неопределенности среднего уровня поля на 2,6 дБ.
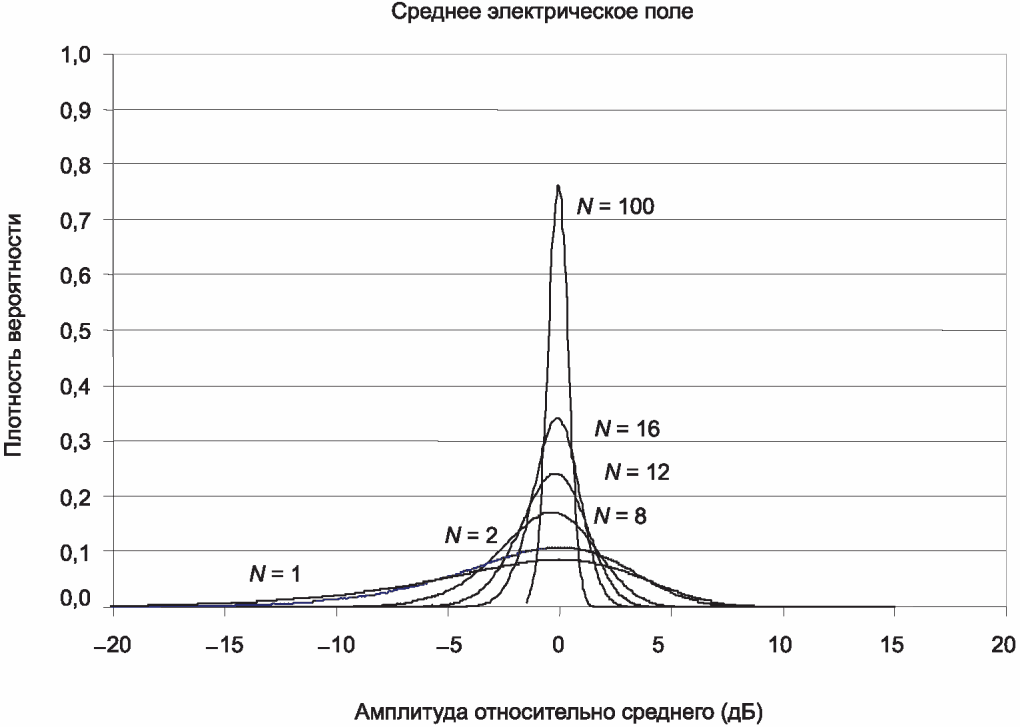
компоненты электрического поля при одном фиксированном
местоположении для измерения с N независимыми выборками
Распределение для N = 1, показанное на рисунке A.7, справедливо как для среднего, так и для максимального полей, поскольку максимальное, минимальное и среднее значения, измеренные в определенном месте, являются одинаковыми значениями для фиксированного положения регулятора. Функция плотности вероятности (PDF) для максимального поля в произвольном месте внутри камеры показана на рисунке A.9. По мере увеличения N распределение смещается вправо и становится  (улучшенная неопределенность). Уменьшение неопределенности для максимального уровня поля вначале происходит очень быстро по мере увеличения числа шагов регулятора, а затем замедляется по мере увеличения N.
(улучшенная неопределенность). Уменьшение неопределенности для максимального уровня поля вначале происходит очень быстро по мере увеличения числа шагов регулятора, а затем замедляется по мере увеличения N.
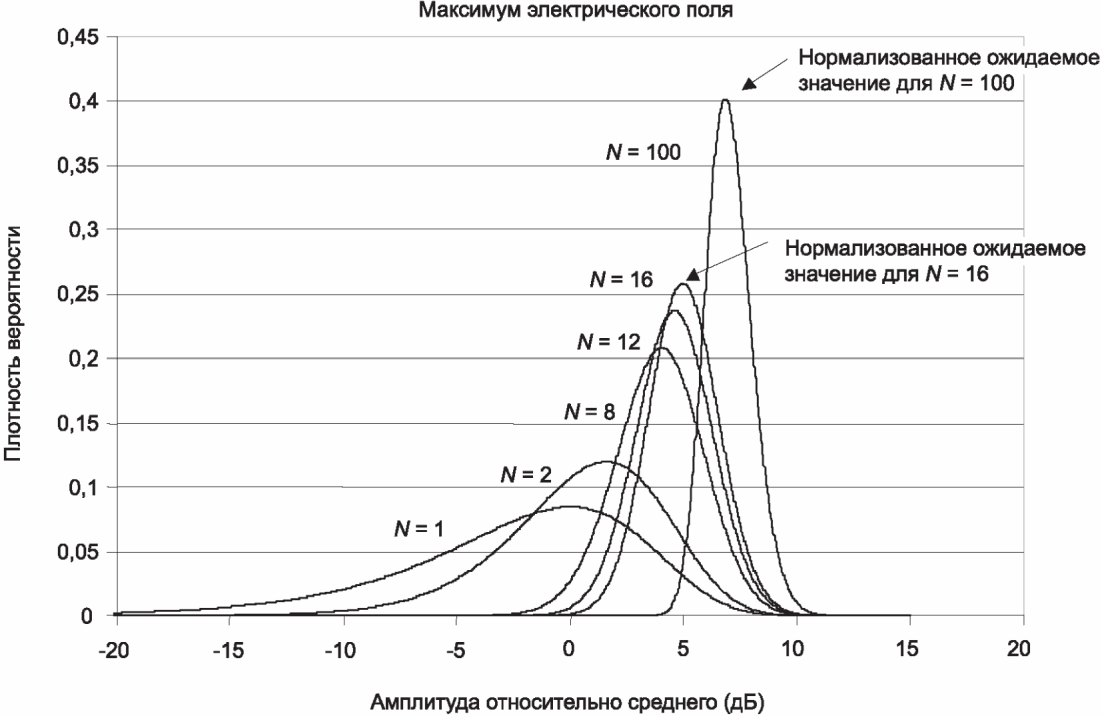
электрического поля при фиксированном местоположении
для измерения с N независимыми выборками
На рисунке A.9 показано, что для 12 шагов регулятора неопределенность максимального поля составляет около 7,2 дБ при 95%-ном доверительном интервале и около 4,8 дБ для 100 шагов регулятора. Это соответствовало бы восьмикратному увеличению времени испытаний для снижения неопределенности максимального уровня поля на 2,4 дБ. Как правило, ширина интервала неопределенности для максимального или минимального значения, нормированного по среднему значению, уменьшается медленнее, чем  [19]. Кроме того, увеличение числа шагов регулятора с 12 до 100 шагов увеличивает ожидаемое значение максимального поля примерно на 3 дБ.
[19]. Кроме того, увеличение числа шагов регулятора с 12 до 100 шагов увеличивает ожидаемое значение максимального поля примерно на 3 дБ.
Поскольку PDF для максимального поля применяется в любом произвольном месте, как и для среднего поля, PDF также является мерой пространственной однородности для N образцов максимального поля по рабочему объему камеры. Измерение средней напряженности поля в одном месте позволяет оценить максимальную напряженность поля в любом другом месте внутри рабочего объема при помощи статистических значений поля. Однако это не позволяет предсказать, в каком конкретном положении регулятора будет достигнуто это максимальное значение. Это положение регулятора отличается для каждого пространственного местоположения.
A.5 Проверка камеры
A.5.1 Общие положения
Проверка проводится, чтобы убедиться, что генерируемые поля имеют одинаковую величину в пределах определенного интервала неопределенности для всех поляризаций и для всех направлений поступления во всех местоположениях в пределах рабочего объема для заданного числа шагов регулятора. Для выполнения этого требования для проведения проверки требуется использование изотропных датчиков, которые обеспечивают доступ к каждой оси датчика. Возможно использование калиброванной электрически короткой дипольной антенны (см. раздел B.1). Процедура проверки должна выполняться при вводе камеры в эксплуатацию и после внесения существенных изменений.
Процедура проверки пустой камеры основана на сравнении пиковых полей, измеренных датчиками электрического поля, со средней измеренной мощностью эталонной антенны. Для повышения точности средние данные эталонной антенны получены для восьми местоположений в пределах рабочего объема. Даже в этом случае влияние ограниченного числа местоположений на неопределенность может быть существенным для небольших N. Оценка неопределенности уровня однородности поля камеры (но только для ортогональных компонентов поля) рассчитана в [19].
Количество выборок, рекомендуемых для проверки, основано на "теоретической" камере размером приблизительно 3 x 7 x 15 м и типичном Q для камеры, изготовленной из сварной стали. Требуемое количество выборок было округлено с учетом отклонений от этой "теоретической" камеры, чтобы обеспечить консервативное испытание. Возможно, что камера большего размера или с меньшей Q, чем у "теоретической" камеры, могла бы соответствовать этому требованию проверки, используя меньшее, чем рекомендуемое, количество шагов.
A.5.2 Процедура проверки
Процедура проверки собирает данные датчика электрического поля (только максимальные данные), а также входную мощность камеры и максимальную и среднюю принимаемую мощность от эталонной антенны, размещенной в пределах рабочего объема. Данные датчика используются для определения однородности поля. Входная мощность камеры и данные датчика используются для определения коэффициента проверки камеры (CVF). Средняя принимаемая мощность от эталонной антенны и входная мощность камеры используются для расчета коэффициента проверки антенны (AVF). AVF используется в качестве контрольного значения при определении того, была ли камера значительно "нагружена" испытуемым оборудованием (ИО). Максимальная принимаемая мощность от эталонной антенны используется для проверки показаний датчика. Данные датчика собираются из восьми местоположений, которые образуют углы "объема однородного поля" или "рабочего объема", как показано на рисунке A.10. Каждый раз, когда датчик перемещается в новое местоположение, эталонная антенна перемещается в новое местоположение в пределах рабочего объема. Ориентация эталонной антенны относительно осей камеры также изменяется по меньшей мере на 20° относительно каждой оси в каждом положении. Это гарантирует, что любое смещение в поляризации локального поля будет обнаружено. Требуется минимум восемь местоположений как для датчика, так и для эталонной антенны.
В таблице B.1 указано количество шагов регулятора, рекомендуемых для выполнения проверки. Возможно, потребуется уменьшить или увеличить количество шагов для оптимизации эффективности. Минимальное количество шагов регулятора должно составлять не менее 12.
Примечание 1 - Как только будет показано, что камера работает должным образом в диапазоне частот от 300 до 400 МГц при минимальном количестве шагов регулятора (т.е. 12), количество местоположений может быть уменьшено до трех. Для камеры, используемой для сбора данных, представленных в этом приложении, сокращение числа местоположений произошло на частоте 1 000 МГц.
Каждая камера будет иметь частоту, ниже которой она больше не будет камерой "с высшими модами" [5], [10], [14] и, следовательно, больше не сможет использоваться в качестве реверберационной камеры. Эта частота будет в основном зависеть от размера камеры, и отсечение будет постепенным, а не резким по мере уменьшения частоты. Нагрузка камеры испытуемым оборудованием или проводящим элементом или артефактом с потерями также может уменьшить LUF (см. A.5.4).
Примечание 2 - В некоторых случаях возможно компенсировать снижение модальной плотности, возникающее по мере приближения рабочей частоты к состоянию "недомодирования". В целом и при соблюдении осторожности компенсация может быть достигнута за счет увеличения числа шагов регулятора, но эффекты могут быть ограниченными и специфичными для конкретной конфигурации.
A.5.3 Однородность поля
Целью реверберационной камеры является создание статистически однородной среды для всех местоположений в пределах определенного рабочего объема. Только что описанная процедура предназначена для измерения ожидаемой величины и однородности для данной камеры с использованием заданного числа шагов регулятора. Типичный набор данных датчика, полученных с использованием процедуры проверки (только данные по оси x, для наглядности), показан на рисунке A.11. На рисунке A.12 показаны данные рисунка A.11, нормированные к среднему из восьми максимальных показаний датчика по оси x на каждой частоте (см. B.1.2 (10) (a)). Данные показывают, что измеренная однородность поля составляет около +/- 10 дБ при частоте 100 МГц и уменьшается с увеличением частоты. Также обратите внимание, что данные на более высоких частотах демонстрируют хорошую однородность, даже несмотря на уменьшение количества шагов регулятора.
Примечание 1 - Количество шагов, использованных для сбора данных, показанных на рисунке A.12, было установлено до определения значений в таблице B.1. Это объясняет изменение 20 шагов на 18 шагов и 16 шагов на 18 шагов.
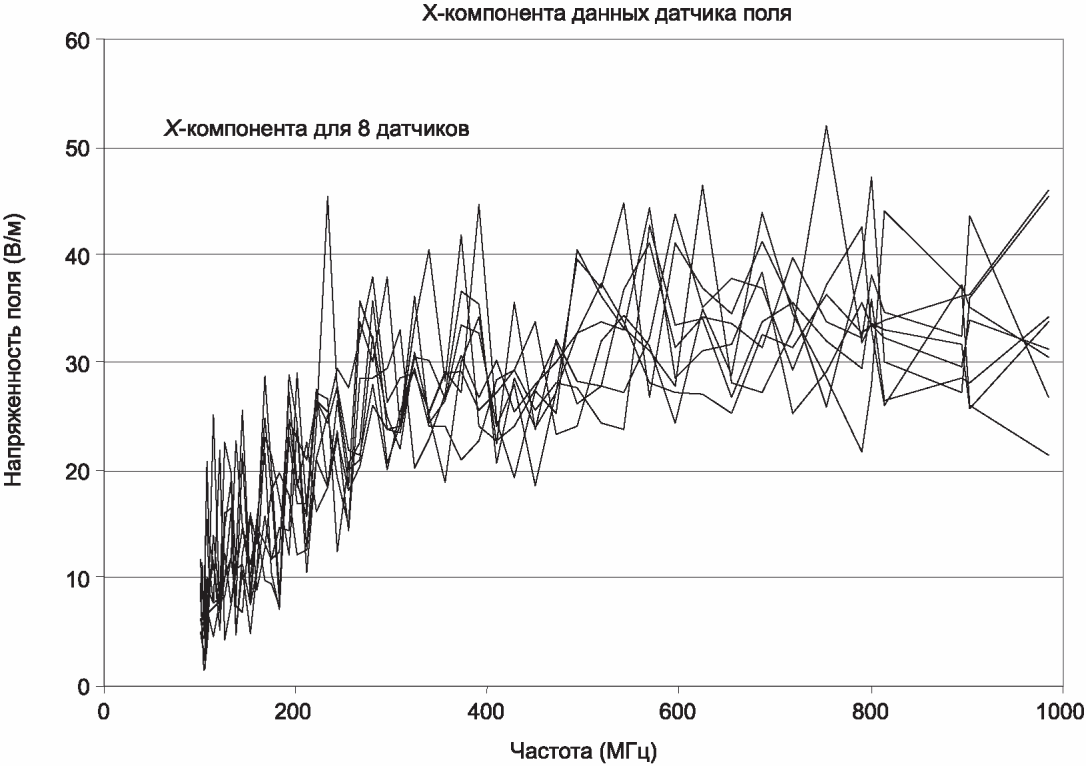
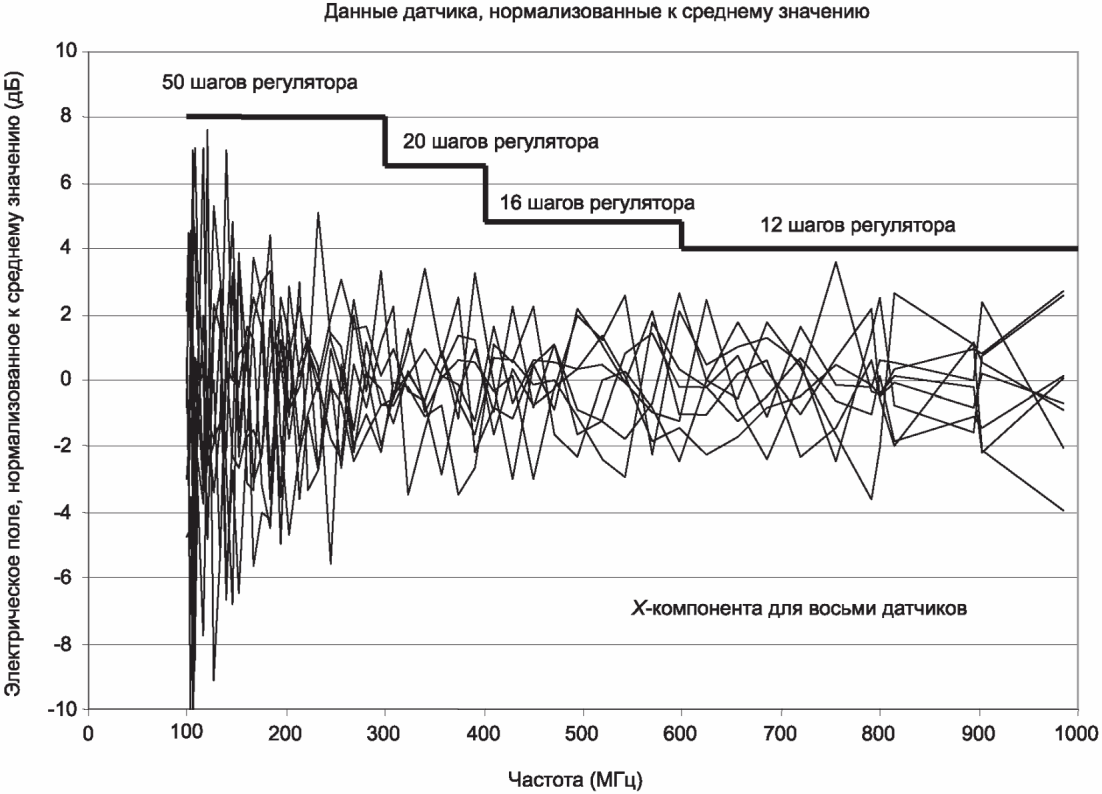
для X-компоненты восьми датчиков
В настоящее время существуют два мнения относительно того, какой метод является наилучшим для определения приемлемой однородности. Для первого метода [29] приемлемая однородность определяется путем отбрасывания 25% данных, которые имеют наибольшую вариацию, а затем требуется, чтобы остальные данные находились в пределах заданного предела. Во втором методе [30], [31] приемлемая однородность определяется путем вычисления стандартного отклонения всех данных и выполнением требования, чтобы стандартное отклонение было в пределах заданного предела. Основным недостатком первого метода является то, что выбрасываемым данным не придается никакого значения. Это может привести к тому, что неопределенности будут по существу неизвестны. Для целей настоящего стандарта было решено использовать метод стандартного отклонения, поскольку затем все данные рассматриваются и им придается соответствующий вес.
Стандартное отклонение данных, показанных на рисунке A.12, показано на рисунке A.13. Данные показывают, что в этом случае стандартное отклонение превысило 3 дБ при частоте примерно 200 МГц. Для примера и в качестве ссылки допуск для стандарта авионики коммерческих самолетов также показан в [30].
Примечание 2 - Считается, что камера соответствует требованиям к однородности поля, при условии что стандартное отклонение как для трех отдельных компонентов поля (Ex, Ey и Ez), так и для всего набора данных ETotal находится в пределах указанного допуска. Общий набор данных состоит из 24 измерений, выполненных путем объединения трех отдельных компонентов поля (Ex, Ey и Ez) из 8 местоположений датчика. Камера, используемая для сбора этих данных, не может использоваться ниже 130 МГц в соответствии с ограничением в [30], если не будет улучшена однородность поля [25]. Комитет, состоящий из представителей как промышленности, так и правительства, разработал предлагаемое ограничение.
Примечание 3 - В исключительных случаях допускается повышенная неравномерность поля, т.е. увеличение неравномерности поля до 4 дБ в диапазоне от 100 до 400 МГц по сравнению с неравномерностью поля 3 дБ на любой частоте выше 400 МГц (см. рисунок A.13). На это допущение повлияло желание гармонизировать данный стандарт IEC с другими стандартами [29], а также экономические соображения. Размеры камеры определяют LUF. Часто высота потолков в большинстве помещений приводит к снижению эффективности. Низкие значения однородности поля ниже 400 МГц позволяют проводить испытания очень больших ИО (например, самолетов) в реверберационной камере без необходимости в чрезмерно большой камере.
Примечание 4 - Общий набор данных не является обычно используемой корневой суммой квадратов (RSS) Ex, Ey и Ez [30].
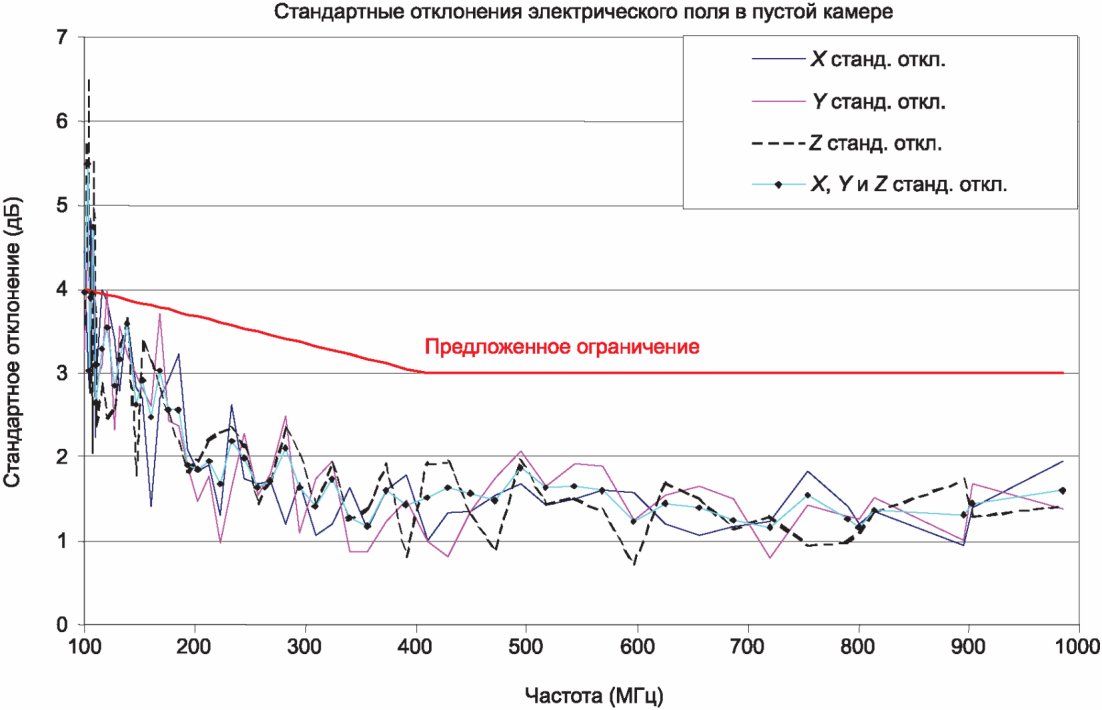
электрического поля восьми датчиков
"Ожидаемое значение" амплитуды электрического поля камеры во время проверки является просто средним арифметическим из 24 максимальных показаний датчика (среднее из максимумов). "Ожидаемое значение" - это значение, на которое откалибрована камера (см. рисунок A.9).
Также возможно оценить электрическое поле камеры EEut на основе измерений эталонной антенны. Уравнение (A.6)
было получено с использованием методов, аналогичных тем, которые использовались для получения выражений для среднего поля [11], и дает оценку электрического поля камеры, В/м, на основе максимальных показаний эталонной антенны, усредненных по количеству местоположений или ориентации антенны,
где PMaxRec - максимальная принимаемая мощность, Вт, за заданное количество шагов регулятора при местоположении или ориентации антенны;
Этот параметр может быть определен из информации, содержащейся в приложении I, и n - это количество местоположений и ориентаций антенны.
Для всех измерений предполагается, что прямая входная мощность одинакова для всех собранных данных. Если это так, то данные могут быть нормализованы после получения среднего значения показаний датчика. Если нет, то показания датчика необходимо выровнять путем нормализации к значению входной мощности, которое соответствует этим показаниям датчика. Нормализация электрического поля к входной мощности камеры производится путем деления показаний датчика на квадратный корень из входной мощности. Это также может быть сделано для расчетного электрического поля на основе эталонной антенны.
Рекомендуется выполнить перекрестную проверку путем сравнения среднего электрического поля, измеренного датчиками, с расчетным ожидаемым электрическим полем, основанным на восьми измерениях антенны. Любые расхождения, превышающие +/- 3 дБ между измерениями на основе датчика и антенны, должны быть устранены (см. также раздел 8). Обратите внимание, что ожидается значительное расхождение на более низких частотах из-за нагрузки, вызванной передающей и приемной антеннами.
По этой причине согласование между двумя методами не ожидается на частотах, где разница между входной мощностью камеры и измеренной максимальной мощностью, принятой от эталонной антенны, составляет 10 дБ или менее.
A.5.5 Воздействие нагрузки
Когда ИО или другой объект помещается внутри камеры реверберации, существует вероятность того, что ИО нагрузит камеру. Энергия, поглощаемая ИО или другими объектами, в этом случае больше не доступна для создания желаемой среды. По этой причине необходимо увеличить входную мощность камеры, чтобы компенсировать эту нагрузку. Любая нагрузка, вызванная уменьшением рабочего объема (даже когда ИО является непоглощающим), ограничивается требованием о том, что ИО и все вспомогательное оборудование не должны занимать более 8% от общего объема камеры (см. раздел D.1).
Примечание 1 - Источником полей на самом деле является отражение радиочастотной энергии от стен. Хотя антенна используется для подачи радиочастотной энергии в камеру, эта энергия не направлена на ИО. Если ИО поглощает энергию, то эта энергия больше не может быть использована для создания испытательной среды. Следующие данные продемонстрируют концепцию.
Перед проведением любого испытания должна быть произведена проверка на воздействие нагрузки. Это делается путем измерения средней мощности, принимаемой эталонной антенной, за то же количество шагов регулятора, которое использовалось для выполнения проверки с установленным ИО. Данные этого единственного измерения затем сравниваются с восемью измерениями, полученными в ходе проверки. Если средняя принимаемая мощность, измеренная с помощью ИО на месте, не находится в пределах допустимого диапазона среднего поля, измеренного во время проверки (т.е. если оно значительно больше или меньше, чем данные проверки), то считается, что камера была нагружена ИО. Затем при расчете входной мощности, необходимой для создания желаемого испытательного поля, потребуется поправочный коэффициент. Этот коэффициент называется коэффициентом нагрузки камеры (CLF). CLF получается путем взятия соотношения между измерением, выполненным с установленным ИО, и средним или "ожидаемым значением" из восьми измерений, выполненных во время проверки, т.е. для той же конфигурации, за исключением удаления ИО [30].
Для определения ограничения, до которого камера может быть нагружена, должна быть проведена оценка однородности поля в условиях жестких нагрузок (см. B.1.6). Пример такой оценки показан на рисунке A.14. Рабочий объем этой реверберационной камеры был нагружен 27 частями 122-сантиметрового пирамидального поглотителя. На рисунке A.15 показана величина нагрузки, создаваемой в камере абсорберами. Нагрузка на камеру, или величина нагрузки, в диапазоне частот от 100 МГц до 18 ГГц варьировалась от максимума примерно в 23 дБ до минимума в 10 дБ при средней нагрузке около 14 дБ. На рисунке A.16 показано стандартное отклонение полей в нагруженной камере.

на воздействие нагрузки
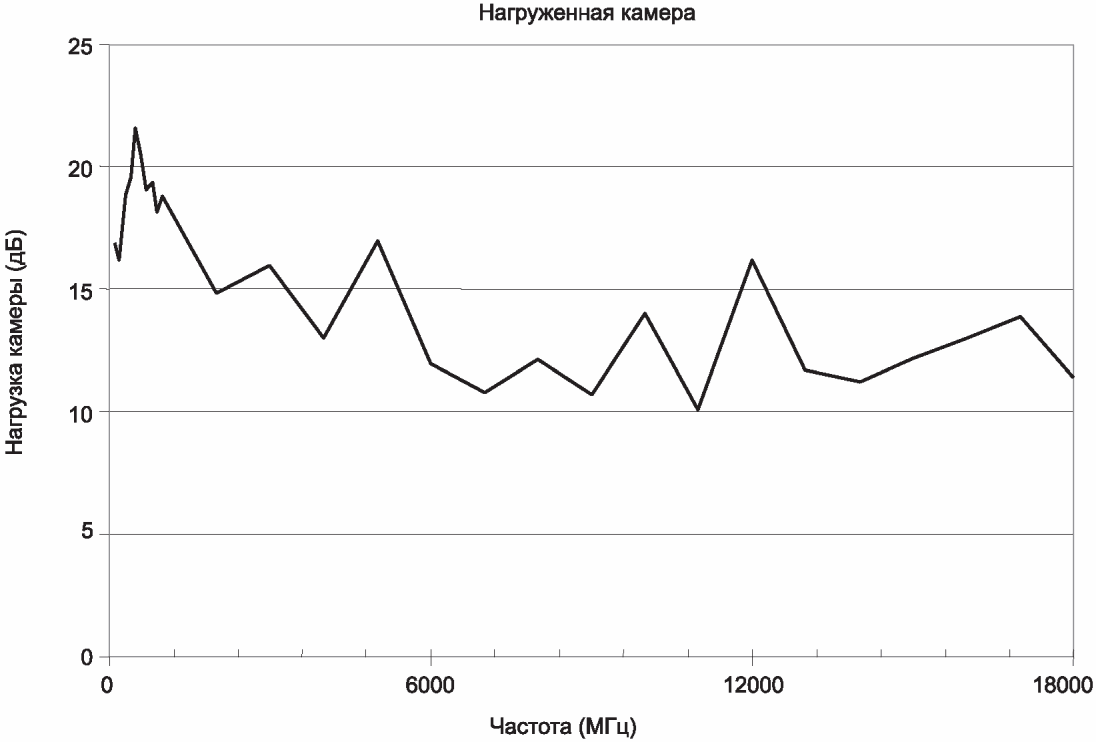
эффектов нагрузки
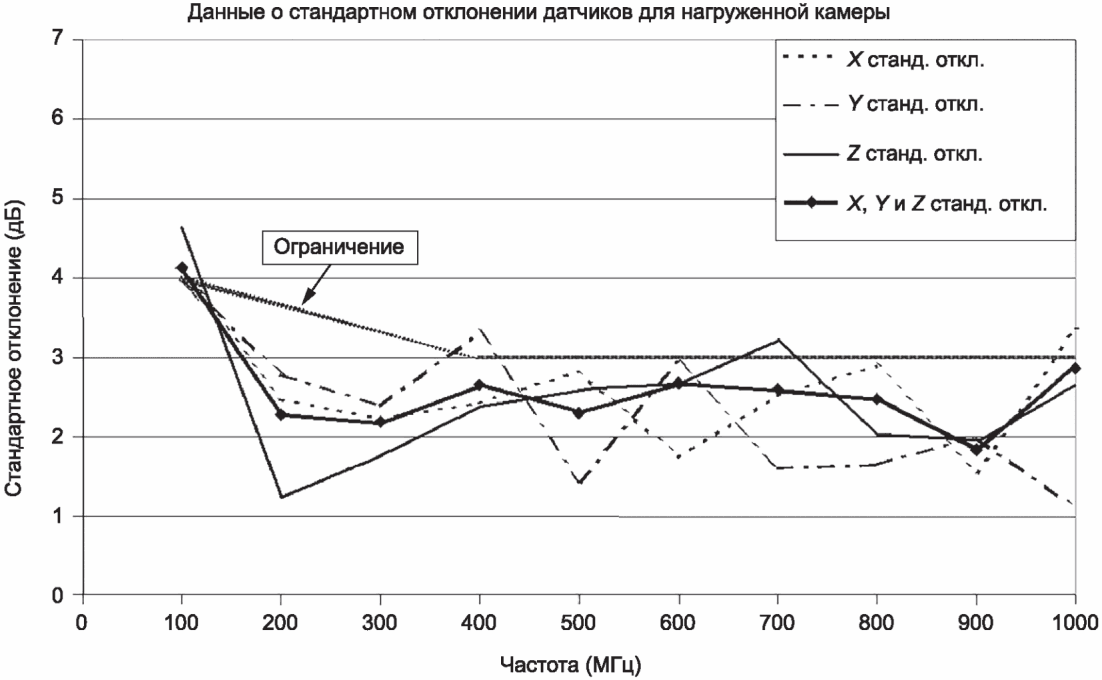
электрического поля для восьми датчиков в нагруженной камере
Стандартное отклонение нагруженной камеры, хотя и незначительно отличалось от проверки пустой камеры, показанной на рисунках A.12 и A.13, не показало значительного ухудшения.
Примечание 2 - Стандартное отклонение увеличилось (вместо уменьшения) примерно на 0,5 дБ, скорее всего, из-за близости датчика к поглотителю, что приводит к тому, что величина поля принимает другое распределение с большей неопределенностью [14].
A.5.6 Создание испытательного поля - помехоустойчивость
Подача необходимого количества энергии в камеру создает желаемую среду для испытания. Мощность, необходимая для создания желаемой напряженности поля, может быть рассчитана с помощью уравнения (A.7):
где ETest - это требуемая напряженность поля, В/м;
CLF - коэффициент нагрузки камеры (см. раздел B.2 (7)) (безразмерный);
Обратите внимание, что измерения датчика, используемые для определения электрического поля камеры, являются прямоугольными компонентами датчика, а не RSS.
Величина радиочастотной мощности, излучаемой устройством, размещенным в камере, может быть определена путем измерения величины мощности, принимаемой эталонной антенной, и корректировки вносимых потерь камеры [4]. Мощность, излучаемая устройством, может быть рассчитана с использованием либо средней, либо пиковой мощности, полученной при заданном количестве шагов регулятора и/или поворотов регулятора. Уравнение (A.8) используется для измерений на основе средней принятой мощности, в то время как уравнение (A.9) используется для измерений на основе пиковой принятой мощности. Преимуществом использования измерений, основанных на средней мощности, является меньшая неопределенность. Недостатком является то, что измерительная система должна иметь чувствительность на 20 дБ ниже фактического среднего значения для получения точного среднего измерения, а прерывистые сигналы могут быть искусственно снижены из-за недостаточной выборки.
ИС МЕГАНОРМ: примечание. Формулы даны в соответствии с официальным текстом документа. |
где PRadiated - излучаемая мощность, Вт, от устройства в пределах измеренной полосы пропускания;
CVF - коэффициент проверки камеры (безразмерный) (см. раздел B.2 (6));
CLF - коэффициент нагрузки камеры (безразмерный) (см. раздел B.2 (7));
IL - вносимые потери в камере (безразмерные) (см. B.1.4);
PAveRec - принимаемая мощность, Вт, измеренная эталонной антенной, усредненная по количеству шагов регулятора (см. B.1.2 (5));
PMaxRec - максимальная получаемая мощность, Вт, за количество шагов регулятора (см. B.1.2 (5));
Примечание - При выборе детекторов измерительных приемников следует руководствоваться CISPR 16-1-1.
A.5.8 Q-фактор камеры для непрерывного и импульсного испытания
Проверка основана на использовании непрерывного возбуждения. При использовании модулированных сигналов должны учитываться искажения, вызванные добротностью камеры или Q (см. раздел B.3). Q-фактор камеры может быть рассчитан с использованием уравнения (A.10):
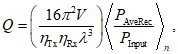
где  и
и  являются коэффициентами эффективности антенны (безразмерными) для антенн Tx и Rx соответственно и могут считаться равными 0,75 для логарифмически периодической антенны и 0,9 - для рупорной антенны;
являются коэффициентами эффективности антенны (безразмерными) для антенн Tx и Rx соответственно и могут считаться равными 0,75 для логарифмически периодической антенны и 0,9 - для рупорной антенны;
V - объем камеры, единицы м3;
PAveRec - усредненная принимаемая мощность, единицы Вт, для эталонной антенны;
PInput - входная мощность камеры, Вт [30]; и
n - количество местоположений и ориентации антенн, используемых для сбора данных проверки на оцениваемой частоте.
Для импульсного испытания постоянная времени камеры  задается уравнением (A.11):
задается уравнением (A.11):

где Q - фактор качества камеры, рассчитанный с использованием (A.10);
f - частота испытания, Гц.
Постоянная времени камеры не должна превышать доли 0,4 от длительности импульса любой испытательной формы сигнала. Однако, если это так, то в камеру следует добавить поглотитель или увеличить длительность импульса. Если используется поглотитель, добавляйте поглотитель до тех пор, пока не будет удовлетворено требование постоянной времени при минимально возможном количестве поглотителя. При использовании поглотителя должен быть получен новый CLF. Если нагрузка, обусловленная поглотителем, больше, чем нагрузка, полученная при проверке нагрузки камеры (см. B.1.6), то проверку камеры необходимо повторить.
BECKER G.E. and AUTLER S.H. Water vapor absorption of electromagnetic radiation in the centimeter wave-length range, Phys. Rev., Sep. 1946, vol. 70 no. 5/6, pp. 300 - 307 | |
LAMB W.E. (Jr.) Theory of a microwave spectroscope, Phys. Rev., Sep. 1946, vol. 70 nos. 5/6, pp. 308 - 317 | |
MEYER E., HELBERG H.-W. and VOGEL S. Hallraummesstechnik und Bau eines grossen Hallraums | |
CORONA P., LATMIRAL G., PAOLINI E. and PICCIOLI L. Use of a reverberating enclosure for measurements of radiated power in the microwave range, IEEE Trans. EMC, vol. 18 no. 2, May 1976, pp. 54 - 59; Comments and corrections, IEEE Trans. EMC, vol. 18 no. 4, Nov. 1976, p. 205 | |
CRAWFORD M.L. and KOEPKE G.H. Design, evaluation, and use of a reverberation chamber for performing electromagnetic susceptibility/vulnerability measurements, National Bureau of Standards (US) Technical Note 1092, April 1986 | |
CORONA P., LADBURY J. and LATMIRAL G. Reverberation-chamber research then and now: a review of early work and comparison with current understanding, IEEE Trans. EMC, Feb 2002, vol. 44 no. 1, pp. 87 - 94 | |
[7] |  M., M.,  O. and KILDAL P.-S. Reverberation Chambers for EMC Susceptibility and Emission Analyses, Review of Radio Science 1999 - 2002, Chapter 18, Wiley-Interscience, Inc., New York, 2002 O. and KILDAL P.-S. Reverberation Chambers for EMC Susceptibility and Emission Analyses, Review of Radio Science 1999 - 2002, Chapter 18, Wiley-Interscience, Inc., New York, 2002 |
ARNAUT L.R. On the maximum rate of fluctuation in mode-stirred reverberation, IEEE Trans. EMC, Nov. 2005, vol. 47 no. 4, pp. 781 - 804 | |
KOSTAS J.G. and BOVERIE B. Statistical model for a mode-stirred chamber, IEEE Trans. EMC, Nov. 1991, vol. 33 no. 4, pp. 366 - 370 | |
HILL D.A. Electromagnetic theory of reverberation chambers, National Institute of Standards and Technology (US) Technical Note 1506, Dec. 1998 | |
LADBURY J.M., KOEPKE G.H. and Camell D.G. Evaluation of the NASA Langley research center mode-stirred chamber facility, National Institute of Standards and Technology (US) Technical Note 1508, Jan. 1999 | |
ARNAUT L.R. Operation of electromagnetic reverberation chambers with wave diffractors at relatively low frequencies, IEEE Trans. EMC, Nov. 2001, vol. 43 no. 4, pp. 637 - 653 | |
MARVIN A.C., ANGUS JAS., DAWSON J.F and CLEGG J. Enhancements to stirred mode chambers by the use of pseudo-random phase reflection gratings, Proc. EMC'94 Int. Symp. EMC, Rome, Italy, 1994, pp. 218 - 221 | |
ARNAUT L.R. Compound exponential distributions for undermoded reverberation chambers, IEEE Trans. EMC, Aug. 2002, vol. 44 no. 3, pp. 442 - 457 | |
ARNAUT L.R. Limit distribution for imperfect electromagnetic reverberation, IEEE Trans. EMC, May 2003, vol. 45 no. 2, pp. 357 - 379 | |
DUNN J.M. Local, high-frequency analysis of the fields in a mode-stirred chamber, IEEE Trans. EMC, Feb. 1990, vol. 32 no. 1, pp. 53 - 58 | |
[17] | HILL D.A. Boundary fields in reverberation chambers, IEEE Trans. EMC, May 2005, vol. 47 no. 2, pp. 281 - 290 |
ARNAUT L.R. and WEST P.D. Electromagnetic reverberation near a perfectly conducting boundary, IEEE Trans. EMC, May 2006, vol. 48 no. 2, pp. 359 - 371 | |
ARNAUT L.R. Measurement uncertainty in reverberation chambers - I. Sample statistics, National Physical Laboratory (UK), Report TQE 2, Ed. 2.0, Dec. 2008 [http://publications.npl.co.uk/npl_web/pdf/TQE2.pdf] | |
 O. and O. and  M. Stirrer efficiency in FOA reverberation chambers, evaluation of correlation coefficients and chi-squared tests, Proc. IEEE Int. Symp. EMC, Washington, DC, Aug. 2000, pp. 11 - 16 M. Stirrer efficiency in FOA reverberation chambers, evaluation of correlation coefficients and chi-squared tests, Proc. IEEE Int. Symp. EMC, Washington, DC, Aug. 2000, pp. 11 - 16 | |
 H.G., WINZERLING T., NITSCH J., EULIG N. and ENDERS A. Statistical interpretation of autocorrelation coefficients for fields in mode-stirred chambers. Proc. IEEE Int. Symp. EMC, Chicago, IL, Aug. 2005, pp. 550 - 555 H.G., WINZERLING T., NITSCH J., EULIG N. and ENDERS A. Statistical interpretation of autocorrelation coefficients for fields in mode-stirred chambers. Proc. IEEE Int. Symp. EMC, Chicago, IL, Aug. 2005, pp. 550 - 555 | |
[22] | LEHMAN T.H. A statistical theory of electromagnetic fields in complex cavities, Note 494, USAF Phillips Laboratory Interaction Note Series, May 1993 |
ARNAUT L.R. and WEST P.D. Evaluation of the NPL stadium reverberation chamber using mechanical and Aug. 1998 | |
[24] | FREYER G.J., HATFIELD M.O., JOHNSON D.M. and SLOCUM M.B. Comparison of measured and theoretical statistical properties of complex cavities, Proc. IEEE Int. Symp. on EMC, Santa Clara, CA, Aug. 1996, pp. 250 - 253 |
LADBURY J.M. and GOLDSMITH K. Reverberation chamber verification procedures, or how to check if your chamber ain't broke and suggestions on how to fix it if it is, Proc. IEEE Int. Symp. on EMC, Washington DC, Aug. 2000, pp. 17 - 22 | |
[26] | LADBURY J.M. Reverberation chamber relationships: corrections and improvements, or three wrongs can (almost) make a right, Proc. IEEE Int. Symp. EMC, Seattle, WA, Aug. 1999, pp. 1 - 6 |
ARNAUT L.R. Sampling distributions of random electromagnetic fields in mesoscopic or dynamical systems, Phys. Rev. E, vol. 80 no. 3, 036601, 2009 | |
LIU B.-H., CHANG D.C. and MA M.T. Eigenmodes and the composite quality factor of a reverberating chamber, National Bureau of Standards (US), Technical Note 1066, 1983 | |
IEC 61000-4-3, Electromagnetic compatibility (EMC) - Part 4-3: Testing and measurement techniques - Radiated, radio-frequency, electromagnetic field immunity test (Электромагнитная совместимость (ЭМС). Часть 4-3. Методы испытаний и измерений. Испытание на устойчивость к излучению, радиочастотам и электромагнитному полю) | |
RTCA/DO-160E, Environmental conditions and test procedures for airborne equipment (Change Notice to Section 20), Dec. 2004 | |
MIL-STD-461E, Requirements for the control of electromagnetic interference emissions and susceptibility, Aug. 1999 | |
[32] | MIL-STD-1377, Effectiveness of cable, connector, and weapon enclosure shielding and filters in precluding hazards of electromagnetic radiation to ordnance, Aug. 1977 |
(обязательное)
B.1.1 Общие положения
В качестве первоначального руководства по эффективности камеры и требованиям к входной мощности выполните "одноразовую" проверку пустой камеры (без ИО), используя процедуры, описанные в этом разделе. Перед каждым испытанием должна быть проведена проверка с использованием процедур, указанных в разделе B.2.
Однородность поля камеры должна быть проверена для первой декады рабочего диапазона частот. Камера может использоваться для проведения испытаний с частотой и выше, при которой камера соответствует требованиям к однородности поля, указанным в таблице B.2.
Необходимы следующие шаги.
(1) Очистите рабочий объем (т.е. удалите испытательный стенд и любые другие предметы, независимо от того, нагружают они камеру или нет) и разместите приемную антенну в месте внутри рабочего объема камеры, как указано в примечаниях к рисунку B.1. Прибор для измерения амплитуды сигнала от приемной антенны настраиваем на необходимую частоту.
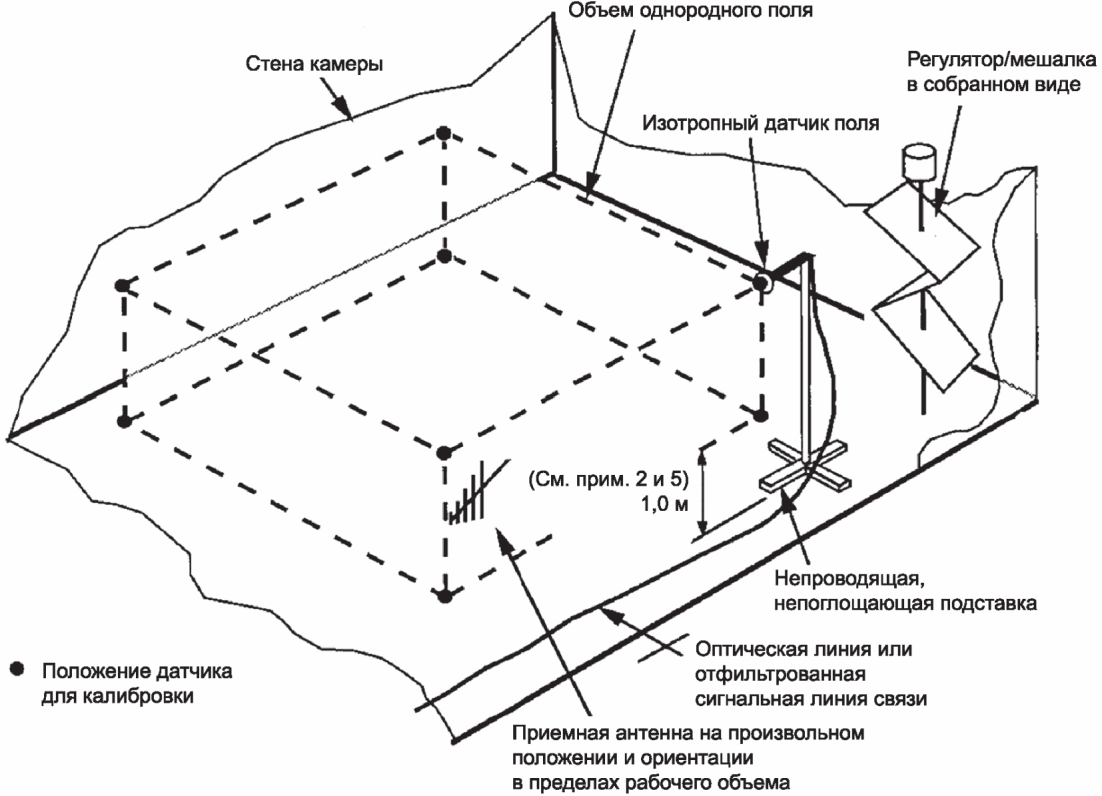
Примечание 1 - Проверка полей внутри реверберационной камеры должна состоять из восьми местоположений датчика.
Примечание 2 - Места расположения охватывают объем, известный как рабочий объем камеры. Рекомендуется, чтобы поверхности, ограничивающие рабочий объем, находились не ближе 1 м (см. примечание 5) от любой поверхности камеры, антенны, генерирующей поле, или узла регулятора. Для целей проверки и мониторинга приемная антенна может быть расположена в любом месте в пределах рабочего объема. Передающая антенна должна быть направлена в угол камеры, если это возможно. Направление антенны в сторону регулятора также допустимо. Местоположение передающей антенны должно оставаться фиксированным во время проверки и при проведении испытания. Расположение передающей антенны должно быть одинаковым как для проверки, так и при проведении испытания.
Примечание 3 - Рабочий объем может быть рассчитан в соответствии с максимальным рабочим объемом камеры или в соответствии с размерами предметов, подлежащих испытанию. Рекомендуется, чтобы размер рабочего объема соответствовал максимальному рабочему объему; в противном случае, если необходимо испытать более крупные элементы, потребуется новая проверка. Рабочий объем не обязательно должен быть прямоугольной формы. Для произвольных форм может потребоваться добавить точки проверки, чтобы правильно определить рабочий объем.
Примечание 4 - Для проведения проверки следует использовать изотропный датчик с доступом к каждой из трех осей. Калиброванная, электрически короткая дипольная антенна (т.е. длиной менее  ) может быть использована в качестве замены, при условии что дипольная антенна расположена в трех взаимно перпендикулярных ориентациях для каждого места измерения. Следует позаботиться о том, чтобы на диполь не влиял его соединительный кабель. Рекомендуется использовать оптически изолированную измерительную систему (изотропный датчик или диполь).
) может быть использована в качестве замены, при условии что дипольная антенна расположена в трех взаимно перпендикулярных ориентациях для каждого места измерения. Следует позаботиться о том, чтобы на диполь не влиял его соединительный кабель. Рекомендуется использовать оптически изолированную измерительную систему (изотропный датчик или диполь).
Примечание 5 - Минимальное расстояние разделения может быть уменьшено, при условии, что расстояние разделения больше  для самой низкой испытательной частоты. Разделительные расстояния менее
для самой низкой испытательной частоты. Разделительные расстояния менее  ни в коем случае не рекомендуются.
ни в коем случае не рекомендуются.
(2) Поместите датчик электрического поля в место по периметру рабочего объема камеры, как показано на рисунке B.1.
(3) Начиная с самой низкой испытательной частоты fs отрегулируйте радиочастотный источник таким образом, чтобы подавать соответствующую входную мощность в передающую антенну для получения надежных показаний датчика. Передающая антенна не должна непосредственно облучать рабочий объем или приемную антенну и датчики. Направление передающей антенны в один угол камеры часто является оптимальной конфигурацией. Частота должна находиться внутри полосы как для передающей, так и для приемной антенны, которые должны быть антеннами с линейной поляризацией. Необходимо позаботиться о том, чтобы гармоники радиочастотного сигнала, поступающего в камеру, были по крайней мере на 15 дБ ниже основной.
Примечание 1 - При нормальной работе самая низкая испытательная частота fs обычно составляет порядка 80 МГц, и однородность поля проверяется для первой декады рабочего диапазона частот. Если выбрана самая низкая испытательная частота, отличная от 80 МГц, например, в небольшой камере, используемой для создания высокой напряженности поля, то однородность поля камеры все равно проверяется для первой декады рабочего диапазона частот. Начальная частота для допустимых измерений никогда не должна быть ниже частоты, при которой камера соответствует требованиям к однородности поля, указанным в таблице B.2.
(4) Поверните регулятор(ы) на 360° дискретными шагами одинакового размера (режим работы с регулировкой), чтобы прибор для измерения амплитуды и датчик электрического поля зафиксировали минимальное количество выборок, как указано в таблице B.1, за один полный оборот регулятора. Следует позаботиться о том, чтобы время выдержки было достаточно продолжительным, чтобы приборы для измерения амплитуды и датчики электрического поля имели время для правильной реакции.
Таблица B.1
Полоса частот | Количество частот <b>, требуемых для проверки | |
От fs до 3fs <c> | 12 | 20 |
От 3fs до 6fs | 12 | 15 |
От 6fs до 10fs | 12 | 10 |
Свыше 10fs | 12 | 20/декаду |
<a> Минимальное количество шагов регулятора равно 12 для всех частот. Для многих камер количество шагов регулятора должно быть увеличено на более низких частотах. Максимальное количество шагов регулятора - это количество независимых выборок, которые может воспроизвести данный регулятор. Это количество зависит от частоты и должно быть проверено при вводе камеры в эксплуатацию. В случае если камера не соответствует требованиям однородности, то количество шагов регулятора может быть увеличено до максимального количества шагов регулятора. Пример увеличенного числа шагов регулятора в этом случае показан на рисунке A.12. <c> fs - начальная частота (см. A.1.3 для LUF). | ||
(5) Зарегистрируйте максимальную и среднюю мощность (линейно усредненное значение мощности: т.е. выраженное в Вт, а не в дБм) принимаемого сигнала (PMaxRec, PAveRec), максимальную напряженность поля EMax x,y,z для каждой оси датчика электрического поля и среднее значение входной мощности PInput при вращении регулятора.
Примечание 2 - Значение входной мощности PInput представляет собой прямую мощность, усредненную за время вращения регулятора. Количество выборок, используемых для определения среднего значения, должно быть по крайней мере таким же, как количество выборок, используемых для проверки камеры. Большие колебания входной мощности (например, 3 дБ или более) являются признаком низкой эффективности источника/усилителя. Все проверки зависят от антенны. Смена антенн может привести к аннулированию проверки. Все измерения мощности производятся относительно разъема антенны. Предполагается, что антенны являются высокоэффективными антеннами (т.е. с эффективностью более 75%).
(6) Повторяйте описанную выше процедуру с шагами, изменяющимися по логарифму частоты, как описано в таблице B.1, пока частота не станет равной 10fs.
(7) Повторите для каждого из восьми положений датчика, показанных на рисунке B.1, и для восьми положений антенны Rx (одно из которых должно находиться в центре рабочего объема) до 10fs.
Примечание 3 - Шаги (4) и (6) при желании можно поменять местами, т.е. пошагово переключать частоты на каждом шаге регулятора.
Примечание 4 - Если помещение и регулятор мод имеют строгую геометрическую симметрию и если регулятор мод расположен симметрично относительно всех стен камеры, то набор мест расположения датчиков не следует выбирать таким образом, чтобы демонстрировать цилиндрическую симметрию. Симметрию легче всего устранить, разместив датчики в разных местах от ближайшей к ним стены.
Примечание 5 - Антенну Rx следует перемещать в новое место в пределах рабочего объема камеры при каждом изменении местоположения датчика. Антенна также должна быть установлена в новой ориентации относительно оси камеры в каждом месте (не менее 20° по каждой оси). Для справочных целей x = длина камеры (самый длинный размер), y = ширина камеры и z = высота камеры. Датчик необязательно должен быть ориентирован вдоль осей камеры во время проверки. Следует позаботиться о том, чтобы между антенной и датчиком сохранялось надлежащее расстояние. Каждое местоположение антенны или датчика должно находиться на расстоянии не менее  (или 1 м на самой низкой испытательной частоте, если
(или 1 м на самой низкой испытательной частоте, если  ) от любого предыдущего местоположения. Такое же минимальное расстояние должно соблюдаться между антенной и датчиком. Если антенна Rx установлена в фиксированном положении во время обычного испытания, рекомендуется, чтобы одно из мест было предполагаемым расположением приемной антенны во время измерения или испытаний.
) от любого предыдущего местоположения. Такое же минимальное расстояние должно соблюдаться между антенной и датчиком. Если антенна Rx установлена в фиксированном положении во время обычного испытания, рекомендуется, чтобы одно из мест было предполагаемым расположением приемной антенны во время измерения или испытаний.
) от любого предыдущего местоположения. Такое же минимальное расстояние должно соблюдаться между антенной и датчиком. Если антенна Rx установлена в фиксированном положении во время обычного испытания, рекомендуется, чтобы одно из мест было предполагаемым расположением приемной антенны во время измерения или испытаний.(8) Выше 10fs необходимо оценить только три местоположения датчика и антенны Rx. Датчик и антенна должны находиться на требуемом расстоянии друг от друга и от креплений камеры. Одно место для датчика и антенны должно находиться в центре рабочего объема. Повторите шаги (4) и (5) для остальных частот проверки, как указано в таблице B.1.
(9) Используя данные шага (5), нормализуйте каждое из максимальных измерений датчика электрического поля (т.е. каждое из 8 x 3 = 24 ортогональных составляющих ниже 10fs и 3 x 3 = 9 ортогональных составляющих выше 10fs) до квадратного корня из средней входной мощности:
 (B.1)
(B.1)где EMax x,y,z - максимальное измерение, В/м, по каждой оси датчика (т.е. 24 или 9 измерений) во всех сгенерированных положениях регулятора;
PInput - средняя входная мощность, Вт, подаваемая в камеру во время вращения регулятора, при котором был записан EMax x,y,z.
(10) Для каждой частоты проверки вычислите среднее значение нормализованных максимальных значений по позициям датчика для каждой оси датчика измерений датчика электрического поля  следующим образом:
следующим образом:
следующим образом:
 (B.2)
(B.2)(b) Для каждой частоты ниже 10fs вычислите среднее значение нормализованного максимума всех измерений датчиком электрического поля, придавая равный вес каждой оси (т.е. каждому ортогональному компоненту),  .
.
Это делается путем вычисления суммы всех 24 ортогональных (нормализованных) максимальных значений электрического поля, деленной на произведение количества осей датчика на количество местоположений датчика, т.е. 3·8 = 24:
 (B.3)
(B.3)Примечание 6 - Обозначает среднее арифметическое по ряду положений датчика и/или осей датчика.
(c) Для каждой частоты выше 10fs вычислите среднее значение нормализованных максимальных значений во всех трех положениях датчика, придавая равный вес каждой оси (т.е. каждому ортогональному компоненту). Это приводит к тому же вычислению, что и в (b) при замене 24 на 9.
(11) Для каждой частоты ниже 10fs определите, соответствует ли камера требованиям к однородности поля следующим образом:
(a) Однородность поля определяется как стандартное отклонение от нормализованного среднего значения нормализованных максимальных значений, полученных в каждом из восьми местоположений во время одного поворота регулятора. Стандартное отклонение вычисляется с использованием данных по каждой оси датчика и общего набора данных.
Стандартное отклонение задается:
 (B.4)
(B.4)где n - количество измерений i;
Например, для x-вектора:
 (B.5)
(B.5)где  - индивидуальное измерение x-вектора;
- индивидуальное измерение x-вектора;
 (B.6)
(B.6)где  - индивидуальные измерения всех векторов (m = местоположения датчика с 1 по 8 и n = оси изотропного датчика с 1 по 3, т.е. x, y и z);
- индивидуальные измерения всех векторов (m = местоположения датчика с 1 по 8 и n = оси изотропного датчика с 1 по 3, т.е. x, y и z);
Наконец, стандартное отклонение выражается относительно среднего значения и преобразуется в дБ:
 (B.7)
(B.7)(b) Камера соответствует требованиям к однородности поля, если стандартное отклонение как для отдельных компонентов поля, так и для всего набора данных находится в пределах допуска, как указано в таблице B.2. Если камера не соответствует требованиям к однородности, возможно, камера не сможет работать на желаемой более низкой частоте. Если превышение, при котором камера не отвечает требованиям к однородности, невелико, то, возможно, удастся добиться желаемой однородности с помощью:
1) увеличения количества выборок (т.е. шагов регулятора) на 10% - 50%;
2) нормализации данных к средней выходной мощности камеры (PNet = PInput - PReflected) или
3) уменьшения размера рабочего объема.
Таблица B.2
Полоса частот, МГц | Требования к допускам для стандартных отклонений |
От 80 до 100 | 4 дБ <a> |
От 100 до 400 | 4 дБ на частоте 100 МГц уменьшается линейно до 3 дБ на частоте 400 МГц <a> |
Свыше 400 | 3 дБ <a> |
Если камера превышает требуемую однородность поля, количество требуемых выборок может быть уменьшено, но не менее чем на 12 ступеней регулятора. Это дает возможность оптимизировать каждую камеру для минимального количества выборок и, следовательно, минимального времени испытания.
Примечание 7 - Если регулятор не обеспечивает требуемую однородность, то однородность может быть улучшена за счет увеличения количества регуляторов, за счет увеличения размеров регуляторов или снижения Q путем добавления поглотителя. Характеристики камеры (размер, способ изготовления и материалы стен) также должны быть оценены, чтобы определить, соответствует ли камера требованиям. Камеры с не более чем 60 - 100 модами на самой низкой испытательной частоте или очень высоким Q (такие, как те, которые встречаются в сварных алюминиевых камерах), вероятно, столкнутся с трудностями в обеспечении требуемой однородности на низких частотах.
Важно - После модификации камеры (например, добавлен поглотитель и т.д.) или изменения процедуры проверки (например, изменено количество шагов регулятора и т.д.) для получения желаемой характеристики, при которой конфигурация и/или процедура должны оставаться неизменными в течение всего испытания, чтобы проверка могла считаться действующей.
Коэффициент проверки приемной антенны AVF для пустой камеры определяется для обеспечения базовой линии для сравнения с нагруженной камерой (см. раздел B.2).
Рассчитайте AVF для каждой частоты, используя следующее уравнение:
 (B.8)
(B.8)где PInput - средняя входная мощность, полученная по B.1.2 (5) для соответствующего местоположения, в котором средняя принимаемая мощность PAveRec по B.1.2 (5) была измерена. AVF необходим для корректировки измерений антенны с учетом нескольких эффектов, включая эффективность антенны.
ИС МЕГАНОРМ: примечание. Текст дан в соответствии с официальным текстом документа. |
Примечание - Символы < > обозначают среднее арифметическое, т.е.  , вычисленное в восьми точках датчика, если частота ниже 10fs, или в трех точках, если частота превышает 10fs.
, вычисленное в восьми точках датчика, если частота ниже 10fs, или в трех точках, если частота превышает 10fs.
, вычисленное в восьми точках датчика, если частота ниже 10fs, или в трех точках, если частота превышает 10fs.Вносимые потери камеры IL для пустой камеры определяются для предоставления информации для расчетов, требуемых другими приложениями.
Вычислите IL для каждой частоты, используя следующее уравнение:
 (B.9)
(B.9)где PInput - средняя входная мощность по B.1.2 (5) для соответствующего местоположения, в котором максимальная принимаемая мощность PMaxRec по B.1.2 (5) была измерена.
Примечание - Символы < > обозначают среднее арифметическое, т.е.  , вычисленное в восьми точках пробника, если частота ниже 10fs, или в трех точках, если частота превышает 10fs.
, вычисленное в восьми точках пробника, если частота ниже 10fs, или в трех точках, если частота превышает 10fs.
, вычисленное в восьми точках пробника, если частота ниже 10fs, или в трех точках, если частота превышает 10fs.Проверка пустой камеры, описанная в B.1.2, основана на показаниях датчиков электрического поля. Электрическое поле камеры может быть оценено на основе измерений с использованием антенн. Эта альтернативная процедура содержится в приложении A.
Примечание - Ожидается значительное расхождение на более низких частотах. Это происходит из-за нагрузки, вызванной антеннами Tx и Rx. По этой причине согласование между двумя методами не ожидается на частотах, где разница между входной мощностью камеры и измеренной максимальной мощностью приема от эталонной антенны составляет 10 дБ или менее.
Чтобы определить, оказывает ли на камеру негативное воздействие испытуемое оборудование, которое нагружает камеру, выполните одноразовую проверку однородности поля камеры в условиях имитируемой нагрузки. Рекомендуется проводить проверку нагруженной камеры только один раз в течение срока службы камеры или после ее существенной модификации. Перед каждым испытанием должна быть проведена проверка с использованием процедур, указанных в разделе B.2.
(1) В произвольных местах в пределах рабочего объема камеры установите достаточное количество поглотителя, чтобы нагрузить камеру по крайней мере до уровня, ожидаемого при обычном испытании (изменение AVF в 16 раз (12 дБ) следует рассматривать как номинальную величину нагрузки).
Примечание - Обратите внимание, что каждая камера уникальна. Самый простой способ определить необходимое количество поглотителя - методом проб и ошибок.
(2) Повторите проверку, описанную в B.1.2, используя восемь местоположений датчика электрического поля. Следует позаботиться о том, чтобы датчик электрического поля и приемная антенна находились на расстоянии более  от любого поглотителя. Определите нагрузку камеры, сравнив коэффициент проверки антенны AVF из пустой камеры с коэффициентом, полученным из нагруженной камеры (см. B.1.3).
от любого поглотителя. Определите нагрузку камеры, сравнив коэффициент проверки антенны AVF из пустой камеры с коэффициентом, полученным из нагруженной камеры (см. B.1.3).
 (B.10)
(B.10)(3) Повторите расчет однородности поля, используя данные из восьми местоположений датчика электрического поля.
Если нагрузка камеры приводит к тому, что ортогональная составляющая полей превышает допустимое стандартное отклонение, или если стандартное отклонение для всех векторов (т.е.  ) превышает допустимое стандартное отклонение (см. таблицу B.2), то камера нагружена до такой степени, что однородность поля неприемлема. В этом случае величина нагрузки камеры должна быть уменьшена и оценка воздействия нагрузки должна быть повторена.
) превышает допустимое стандартное отклонение (см. таблицу B.2), то камера нагружена до такой степени, что однородность поля неприемлема. В этом случае величина нагрузки камеры должна быть уменьшена и оценка воздействия нагрузки должна быть повторена.
Перед каждым испытанием, когда испытуемое оборудование и вспомогательное оборудование находятся в камере, выполните проверку камеры в соответствии со следующей процедурой.
(1) Расположите приемную антенну в пределах рабочего объема камеры и поддерживайте расстояние в 1 м (или  на самой низкой испытательной частоте) от испытуемого оборудования, вспомогательного оборудования и т.д., как указано в этом приложении для типа проводимого испытания. Установите прибор для измерения амплитуды так, чтобы он контролировал приемную антенну на корректной частоте.
на самой низкой испытательной частоте) от испытуемого оборудования, вспомогательного оборудования и т.д., как указано в этом приложении для типа проводимого испытания. Установите прибор для измерения амплитуды так, чтобы он контролировал приемную антенну на корректной частоте.
(2) Начиная с самой низкой испытательной частоты fs, отрегулируйте уровень радиочастотного источника, чтобы ввести соответствующую входную мощность PInput в передающую антенну. Необходимо позаботиться о том, чтобы гармоники радиочастотного сигнала, поступающего в камеру, были по крайней мере на 15 дБ ниже основной.
(3) Управляйте камерой и регулятором с учетом возможных дополнительных функций, определенных в B.1, которые были необходимы для соответствия критерию однородности. Следует позаботиться о том, чтобы время ожидания было достаточно продолжительным, чтобы оборудование для измерения амплитуды успело должным образом отреагировать.
(4) Запишите максимальную амплитуду и среднюю амплитуду принимаемого сигнала (PMaxRec, PAveRec), а также среднее значение входной мощности PInput. Измерительные приборы должны иметь минимальный уровень шума не менее чем на 20 дБ ниже максимальной принимаемой мощности PMaxRec, чтобы собирать точные средние данные.
(5) Повторите описанную выше процедуру для каждой частоты испытания, как определено в плане испытаний.
где CVF - нормализованная средняя принимаемая мощность за один оборот регулятора при наличии испытуемого оборудования и вспомогательного оборудования;
PAveRec - средняя принимаемая мощность за один оборот регулятора, измеренная на шаге (4);
PInput - прямая мощность, усредненная за один оборот регулятора, измеренная на шаге (4);
n - количество местоположений антенны, которые используются для передачи сигнала, где оценивается CVF. Требуется только одно местоположение; однако может быть оценено несколько местоположений и данные усреднены по количеству местоположений.
 (B.12)
(B.12)где CVF - отношение средней принятой мощности к входной мощности, полученной на этапе (6);
AVF - отношение средней принятой мощности к входной мощности, полученной при проверке антенны в B.1.2. Для получения AVF потребуется интерполяция.
Если обратное значение величины коэффициента нагрузки камеры превышает нагрузку, измеренную в B.1.2 (5), больше, чем ожидается из-за неопределенности прибора, существует вероятность того, что камера может быть нагружена до такой степени, что это повлияет на однородность поля. В таком случае измерения однородности камеры, описанные в B.1.2, должны быть повторены с установленным ИО или с имитируемой нагрузкой, эквивалентной ИО.
Примечание - Если значение PAveRec, измеренное в разделе B.2 (5), находится в пределах (т.е. не больше и не меньше) значений, зарегистрированных для всех восьми местоположений в B.1.2 (5), то вычисление CLF не требуется и его значение следует принимать равным 1. Если динамический диапазон измерительной системы был недостаточен для получения точных измерений средней принятой мощности, AVF и CVF могут быть пересчитаны с использованием максимальной принятой мощности, а затем использованы для вычисления CLF. Если используется максимальная принимаемая мощность, ее следует использовать для пересчета как AVF, так и CVF.
Внимание! Это относится только к расчету CLF. Не используйте AVF или CVF, основанные на максимальной мощности, для определения каких-либо других параметров!
Для обеспечения того, чтобы временная характеристика камеры была достаточно быстрой для проведения испытания импульсным сигналом, определение постоянной времени камеры должно выполняться с использованием следующей процедуры:
(1) Используя CVF из уравнения проверки камеры (B.11), вычислите фактор качества Q для каждой частоты по уравнению
 (B.13)
(B.13)где  ,
,  - коэффициенты эффективности антенны для передающей и приемной антенн соответственно, которые можно считать (если они неизвестны) равными 0,75 для логопериодической антенны и 0,9 - для рупорной антенны;
- коэффициенты эффективности антенны для передающей и приемной антенн соответственно, которые можно считать (если они неизвестны) равными 0,75 для логопериодической антенны и 0,9 - для рупорной антенны;
V - объем камеры, м3;
CVF - коэффициент проверки камеры.
Примечание - Если значение PAveRec, измеренное в разделе B.2 (4), находится в пределах (т.е. не больше или не меньше) значений, зарегистрированных для всех восьми местоположений в B.1.2 (5), вычисление CLF не требуется и предполагается, что значение CLF равно 1. В этом случае AVF из B.1.2 следует использовать вместо CVF при расчете камеры Q.
(2) Вычислите постоянную времени камеры  , с, для каждой частоты по уравнению
, с, для каждой частоты по уравнению
 (B.14)
(B.14)где Q - значение, рассчитанное на шаге (1);
f - испытательная частота, Гц.
(3) Если постоянная времени камеры превышает 0,4 от модуляции ширины испытательного импульса для более чем 10% испытательных частот, то в камеру должен быть добавлен поглотитель или должна быть увеличена ширина импульса. Если добавлен поглотитель, повторяйте измерение Q и расчет до тех пор, пока не будет удовлетворено требование постоянной времени с наименьшим возможным поглотителем. Если требуется поглощающий материал, то должен быть определен новый CLF.
(обязательное)
В РЕЖИМЕ ПЕРЕМЕШИВАНИЯ
C.1 Проверка камеры в режиме перемешивания
C.1.1 Общие положения
Это приложение относится к работе ревеберационной камеры в режиме перемешивания (непрерывное равномерное вращение), в отличие от проверки с регулировкой мод (дискретное ступенчатое вращение), подробно описанной в приложении B. При работе в режиме перемешивания необходимо следить за тем, чтобы скорость мешалки была такой, чтобы камера, датчики и испытуемое оборудование (ИО) были способны адекватно реагировать на постоянно меняющееся поле, чтобы избежать неприемлемых эффектов (включая усреднение).
При фиксированной скорости вращения регулятора скорость изменения поля изменяется с частотой возбуждения. Это означает, что или регулировка должна быть изменена с учетом изменений поля на самой высокой испытательной частоте, или частота вращения должна выбираться в зависимости от частоты возбуждения.
Устройство регулятора или лопастное колесо должно приводиться в действие либо шаговым двигателем (как в режиме регулятора), либо приводом постоянного тока, при условии, что скорость двигателя можно регулировать для обеспечения испытания ИО с различным временем отклика или цикла. При условии, что ИО адекватно подвергается воздействию непрерывно меняющегося поля, перемешивание в режиме потенциально происходит быстрее, чем в режиме регулировки. Фактически, если время отклика/цикла ИО мало по сравнению со скоростью изменения поля, то метод в режиме перемешивания может быть более тщательным, поскольку также охватываются все промежуточные состояния мешалки, что позволяет избежать эффектов, вызванных переходными процессами поля, которые генерируются во время фаз запуска, остановки и ускорения, присущих работе в режиме регулировки.
Поскольку мешалка мод вращается непрерывно, поле камеры должно отбираться через интервал времени, для которого продолжительность и частота выборки выбираются разумно. Слишком короткий интервал может не позволить датчику или приемнику реагировать достаточно быстро, чтобы зафиксировать мгновенное поле камеры, или это может вызвать побочные эффекты из-за закрытия окон. С другой стороны, слишком большой интервал приводит к равномерному или взвешенному усреднению значений полей по времени, так что большие отклонения от среднего значения могут остаться незамеченными. Слишком медленная частота выборки может привести к неоднозначности измеренных данных о развертке мешалки. Система сбора данных для работы в режиме перемешивания должна быть способна обрабатывать данные с достаточно высокой скоростью и в достаточно большом количестве, что ограничивается максимальной частотой выборки и скоростью перемешивания.
Процедура проверки камеры, описанная в приложении B, может быть использована для проверки камеры для проведения испытаний в режиме перемешивания. Теперь регулятор/мешалка вращается равномерным и непрерывным образом, и поле измеряется датчиками за один оборот или его часть. Основным отличием является использование трехосных датчиков во время проверки объема камеры по 8 точкам. Метод проверки в режиме регулировки, подробно описанный в приложении B, может быть использован как для получения данных об однородности для камеры, так и данных проверки камеры в электрическом поле.
C.1.2 Рекомендации по датчику поля для использования в режиме перемешивания
Большинство коммерчески доступных трехосных датчиков электрического поля (откалиброванных в свободном пространстве) не имеют достаточной частоты дискретизации, чтобы их можно было использовать при проверке в непрерывном режиме - в камере с перемешиванием. Если используются эти датчики, скорость регулятора должна быть достаточно низкой, чтобы калиброванные датчики могли адекватно реагировать на изменяющееся поле. Доступны и другие быстро реагирующие калиброванные датчики. Хотя эти датчики очень часто являются одноосными, их можно использовать, при условии что они переориентированы по трем ортогональным осям в каждом из восьми положений во время проверки объема. Количество независимых выборок N, собранных датчиком за один оборот мешалки, должно быть известно независимо от типа используемого датчика.
Существуют две общие проблемы с выборкой для типичных датчиков: это сглаживание и пиковая выборка, приводящие, по-видимому, к более низким и более высоким уровням напряженности поля соответственно. Обе проблемы также приводят к большей воспринимаемой однородности поля [1] <5>. Их следует свести к минимуму, используя более быстрые датчики и/или более низкие частоты вращения.
--------------------------------
<5> Цифры в квадратных скобках относятся к разделу C.5 "Справочные документы" в конце настоящего приложения.
Если в камеру одновременно помещено несколько датчиков, они должны иметь одинаковую частоту выборки. В противном случае устройства могут не подвергаться воздействию одного и того же ожидаемого пикового поля.
При вращении мешалки с достаточно низкой скоростью и при условии, что камера достаточно ревибрирует, должны выполняться следующие неравенства:
 и
и  (C.1)
(C.1)где Ts - период возбуждения постоянного тока, с, обычно порядка нс; Ts = 1/f0;
 ;
; ;
;Примечание 1 - Количество независимых выборок N не может превышать соответствующее число, которое способен обеспечить ступенчатый регулятор.
Примечание 2 - По мере совершенствования технологии датчика могут или вскоре станут доступны быстрые датчики реального времени (одноосные или трехосные), позволяющие выполнять калибровку объема по восьми точкам с использованием методов непрерывного перемешивания. Это может потребовать обхода сбора данных по умолчанию датчиком под его собственным программным управлением (например, уменьшением или удалением процедуры повторного отбора проб из одной точки данных), чтобы добиться достаточно плотной выборки в непрерывном цикле развертки мешалки.
Примечание 3 - Метод калибровки, приведенный в приложении B, может быть изменен, чтобы обеспечить возможность использования калиброванных датчиков (откалиброванных в свободном пространстве) во время калибровки объема в режиме перемешивания.
Для того чтобы поле полости оставалось в том же установившемся состоянии, что и во время работы с настройкой режима (без учета ступенчатых переходов), верхний предел допустимой скорости перемешивания задается соотношением порядка величины:
 (C.2)
(C.2)где  - скорость механического перемешивания, об/с, на рабочей частоте f, Гц;
- скорость механического перемешивания, об/с, на рабочей частоте f, Гц;
- скорость механического перемешивания, об/с, на рабочей частоте f, Гц;c - скорость света в свободном пространстве, приблизительно 3·108 м/с;
Q - фактор качества камеры на частоте f;
N - максимальное число независимых выборок на частоте f (см. раздел A.3);
V - рабочий объем камеры, м3.
Например, для камеры с V = 100 м3, f = 1 ГГц, Q = 104 и N = 1000 требуется  .
.
.C.2 Испытание на устойчивость в режиме перемешивания
При условии, что камера соответствует однородности камеры с точки зрения стандартного отклонения, во время испытания оборудования можно использовать метод измерения в режиме перемешивания. Во время испытания для установления полей внутри камеры используются только пассивная эталонная антенна и входная мощность камеры. Во время работы в режиме перемешивания количество выборок (интервалы срабатывания ИО) может быть значительно увеличено или уменьшено в зависимости от скорости вращения мешалки и времени срабатывания ИО. Если количество образцов увеличить, то ожидаемое значение максимального поля (излучаемого или принимаемого) увеличится и однородность поля в камере улучшится (см. C.3.3 и A.4.4). Параметрами, требующими тщательного рассмотрения, являются отношение периода перемешивания ко времени релаксации полости и отношение периода перемешивания ко времени срабатывания/цикла ИО [2]. Если скорости перемешивания относительно высоки, то это изменяет фундаментальную природу и характеристики испытательного поля, из-за того, что тогда возникают нестационарные эффекты [3], [4].
Часто отсутствует предварительная информация, касающаяся времени отклика или времени цикла испытуемого оборудования.
Из-за этого недостатка информации измерение в режиме перемешивания должно применяться только с тщательным учетом минимального времени срабатывания и скорости мешалки.
Примечание 1 - Быстродействующие ИО, антенна или датчик - это устройство, способное обеспечить по меньшей мере одну выборку на 1 дБ изменения поля в пределах 3 дБ от максимального значения поля. Для оборудования с медленным временем отклика/цикла, где необходимо задерживаться на некоторое заранее определенное время на каждом шаге регулятора, метод перемешивания может быть более быстрым и точным.
Примечание 2 - Во время оценки ИО время срабатывания ИО (известное или расчетное) должно быть таким же, как у датчиков во время калибровки, что приводит к аналогичному количеству полных выборок.
Некоторые устройства более чувствительны к среднему или агрегированному полю, чем к максимальному полю (например, тепловые эффекты) [1]. В случаях, когда ИО способно усреднять или интегрировать поле, которому оно подвергается, могут быть выгодны быстро вращающиеся мешалки. В таких случаях испытание проводится уже не с максимальным полем камеры, а со средним полем камеры. Максимально допустимая скорость регулятора в рамках этого метода не определена. Таким образом, минимальная скорость перемешивания определяет уровень неопределенности испытательного поля.
Определение соответствующей скорости вращения регулятора имеет важное значение при использовании метода в режиме перемешивания. Эта скорость зависит от частоты и Q камеры [2]. Скорость вращения должна обеспечивать достаточное время, для того чтобы поле камеры и измерительные приборы отслеживали изменения границ полости для адекватной реакции ИО и для обнаружения любого нарушения. Часто при неразрушающем контроле ИО должен демонстрировать повторяющееся отклонение, чтобы определить, подходит ли выбранная частота вращения регулятора. Как только произошел сбой, скорость вращения может быть скорректирована, увеличена или уменьшена, чтобы определить, происходит ли какое-либо изменение порога сбоя. Любое значительное изменение порога отклонения указывает на проблему с исходной частотой вращения регулятора. Метод в режиме перемешивания является наиболее подходящим для быстрого испытуемого оборудования, которое имеет очень короткое время отклика.
В рамках данной процедуры испытаний не предусмотрено точное ограничение скорости перемешивания и подробные процедуры испытания для обеспечения того, чтобы скорость регулятора была достаточно низкой (или быстрой), чтобы испытуемое оборудование реагировало. В качестве ориентира адекватная реакция для ИО, испытанного на помехоустойчивость, требует, чтобы скорость мешалки удовлетворяла
 (C.3)
(C.3)где  - максимальная постоянная времени (время отклика), с, для любого критического компонента в испытуемом оборудовании.
- максимальная постоянная времени (время отклика), с, для любого критического компонента в испытуемом оборудовании.
Например, для камеры с V = 100 м3, f = 1 ГГц, N = 1000 и  , для этого требуется
, для этого требуется  .
.
, для этого требуется .В зависимости от объема испытания, характера испытуемого количества (среднее по сравнению с пиковыми значениями), продолжительности интервала усреднения по времени и конкретного поведения ИО отклонения от верхнего предела, указанного в разделе C.3, могут быть допустимыми, но должны быть надлежащим образом обоснованы.
Если полоса пропускания ИО меньше, чем Q-полоса пропускания камеры на испытательной частоте, то применяется [2]. На практике частотная характеристика и постоянная времени ИО часто неизвестны и их трудно измерить или оценить, или же таких постоянных может быть несколько разных порядков величины. Если испытание включает в себя модулированный сигнал возбуждения, то период сигнала не должен превышать время корреляции, которое требует
 (C.4)
(C.4)где  - механическая скорость перемешивания, об/с, на центральной (несущей) частоте f;
- механическая скорость перемешивания, об/с, на центральной (несущей) частоте f;
B - либо полоса пропускания, Гц, возбуждения [f - B/2, f + B/2], либо BWQ, в зависимости от того, что больше.
Методика (режим перемешивания или режим регулятора) должна быть выделена и согласована в рамках индивидуального плана испытаний оборудования. Обоснование использования любого из методов реверберационной камеры (режим перемешивания или режим регулятора) должно быть записано в протоколе испытаний испытуемого оборудования.
Комитеты по продуктам должны предоставить подробную информацию о надлежащей скорости регулятора для проведения испытаний соответствия конкретного продукта. Если комитеты по продуктам не могут обеспечить соответствие этой информации, испытания должны проводиться с использованием метода в режиме регулятора.
C.3.1 Время срабатывания/цикла испытуемого оборудования
Чем быстрее время отклика и/или время цикла ИО, тем лучше ИО подходит для перемешивания [3]. Это одна из причин, по которой методы с перемешиванием предпочтительны для испытаний на эффективность экранирования (SE). Приемники, используемые для испытания SE, как правило, очень быстры. Для испытания помехоустойчивости должно учитываться время, необходимое для того, чтобы испытуемое оборудование отреагировало на приложенное поле, и любое нарушение или аномалия, которые могут быть обнаружены. При проведении испытаний на излучаемые радиопомехи следует учитывать время цикла устройства и время срабатывания контрольного оборудования.
При очень высоком экранировании приемники часто настраиваются на более узкую полосу пропускания, чтобы увеличить динамический диапазон измерения. Это может сократить время отклика и частоту дискретизации приемника. Эти изменения должны быть учтены во время испытания.
C.3.2 Скорость вращения регулятора/мешалки
Скорость вращения мешалки должна быть установлена до начала испытания. Скорость изменения поля будет определять скорость вращения регулятора. При испытании на помехоустойчивость скорость определяется временем, необходимым для того, чтобы испытуемое оборудование отреагировало на приложенное поле и обнаружило любое нарушение или аномалию. Для испытания на излучаемые радиопомехи скорость определяется временем цикла устройства и временем отклика контрольного оборудования. На рисунках C.1 и C.2 показаны поля внутри реверберационной камеры на двух частотах, когда один регулятор вращается с фиксированной скоростью около 5,2 с на один оборот. Скорость изменения поля внутри реверберационной камеры зависит от частоты. На более высоких частотах скорость изменения может быть очень быстрой даже при умеренной частоте вращения из-за большего количества доступных независимых выборок.
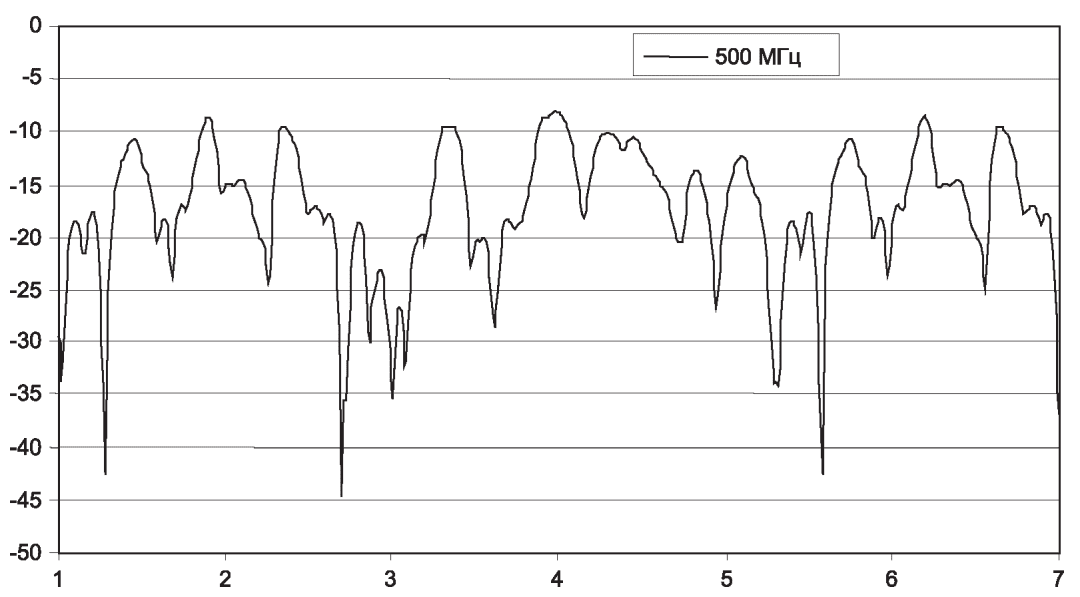
от скорости вращения регулятора(ов) на частоте 500 МГц
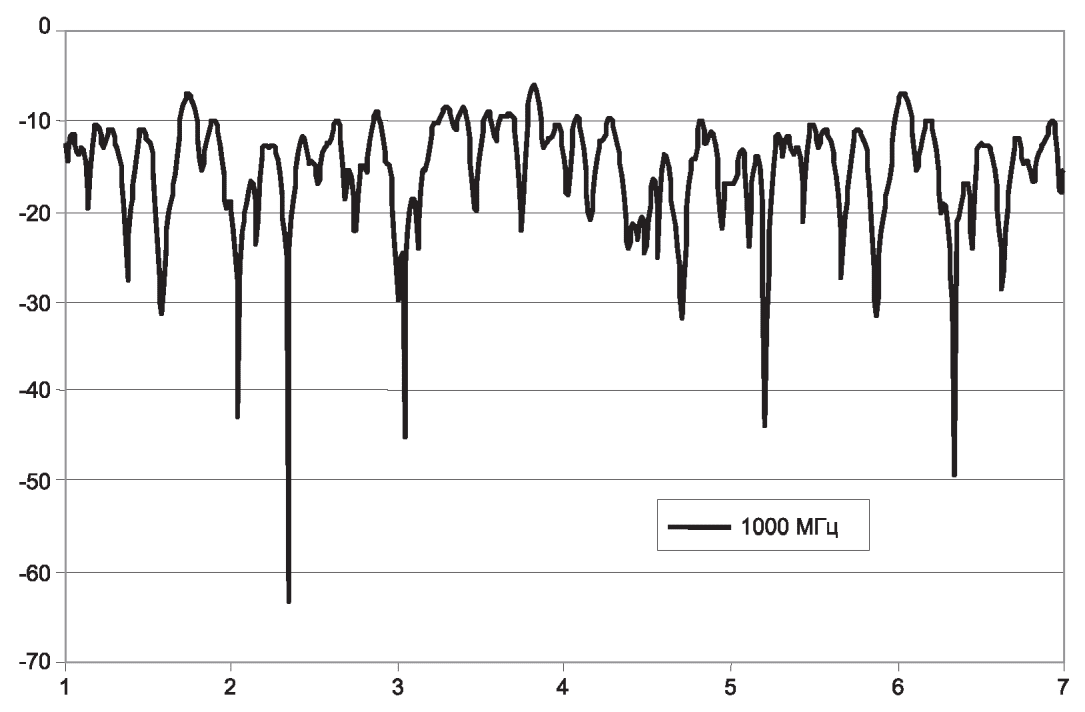
от скорости вращения регулятора(ов) на частоте 1000 МГц
Скорость изменения поля для конкретной камеры должна оцениваться в интересующем диапазоне частот. Скорость вращения регулятора может быть установлена в соответствии с самой медленной скоростью вращения, которая обеспечит максимально допустимую скорость изменения в поле. Частоту вращения регулятора можно дополнительно регулировать в испытуемом диапазоне частот. Оценка регулятора должна выполняться с интервалами, не превышающими 100 МГц на частотах ниже 1 ГГц и 1 000 МГц на частотах выше 1 ГГц.
Как описано в приложении A (см. рисунок A.10), ожидаемое значение максимального электрического поля определяется количеством независимых выборок (т.е. шагов регулятора) N, которые могут быть сгенерированы за один оборот. В приложении B при проверке используется количество шагов регулятора, показанное для обеспечения неопределенностей, меньших, чем максимально допустимое значение для камеры. При использовании режима мешалки, вероятно, будет получено меньшее количество выборок, чем при использовании проверки в режиме регулятора. Если будет получено больше выборок, то влияние на испытания на помехоустойчивость будет заключаться в испытании на более высоком уровне, чем требуется. Для измерений, основанных на максимальной мощности, если во время испытания на излучение будет получено больше выборок, то результатом будет то, что от испытуемого оборудования будет измерен более высокий уровень излучаемой мощности, чем оно фактически излучало. Для измерений, основанных на средней мощности, режим перемешивания был бы более точным из-за увеличенного количества выборок. Желательно, чтобы количество выборок, полученных во время испытания, было таким же, как количество выборок, полученных во время проверки. Если количество выборок неодинаково, то желательно, чтобы количество выборок как для проверки, так и для испытания было как можно большим, поскольку при больших количествах (т.е. превышающих 100) отклонения в ожидаемом электрическом поле менее выражены.
Примечание - Как показано в приложении A, регулятор не способен выдавать бесконечное количество выборок. Максимальное количество выборок n, которые вносят вклад в ожидаемое значение электрического поля, ограничено количеством независимых выборок, которые способен обеспечить регулятор. Это число быстро уменьшается по мере приближения испытательной частоты к самой низкой допустимой частоте данной камеры.
C.4 Проблемы, которые необходимо решить при использовании режима перемешивания
При использовании режима перемешивания необходимо учитывать следующие проблемы:
a) время отклика/цикла испытуемого оборудования;
b) скорость вращения регулятора/мешалки (т.е. скорость изменения поля);
c) влияние перемешивания на точность проверки;
d) из-за различных взаимодействий между размером регулятора/мешалки, размером камеры, скоростью вращения и скоростью изменения поля любая чувствительность, связанная со скоростью изменения поля, может быть не воспроизводимой в камерах с существенно различными характеристиками.
ARNAUT L.R. Effect of local stir and spatial averaging on the measurement and testing in mode-tuned and mode-stirred reverberation chambers, IEEE Trans. EMC, Aug. 2001, vol. 43, no. 3, pp. 305 - 325 | |
ARNAUT L.R. On the maximum rate of fluctuation in mode-stirred reverberation, IEEE Trans. EMC, Nov. 2005, vol. 47, no. 4, pp. 781 - 804 | |
ARNAUT L.R. Nonstationary effects in mode-stirred reverberation, Proc. 15th | |
ARNAUT L.R. Angular spectral plane-wave decomposition of nonstationary random fields in mode-stirred reverberation, Phys. Rev. E, vol. 81, 041133, 2010 |
(обязательное)
Типичная испытательная установка должна быть такой, как показано на рисунке D.1. Компоновка оборудования должна соответствовать фактической установке. Испытуемое оборудование должно находиться на расстоянии не менее  от стенок камеры при самой низкой полезной частоте (LUF) камеры. Испытуемое оборудование, предназначенное для работы на столе, должно располагаться на расстоянии не менее
от стенок камеры при самой низкой полезной частоте (LUF) камеры. Испытуемое оборудование, предназначенное для работы на столе, должно располагаться на расстоянии не менее  от пола камеры. Напольное испытуемое оборудование должно поддерживаться на высоте 10 см над полом диэлектрической подставкой с низкими потерями в области под равномерным объемом. Расположение испытательного оборудования и кабелей должно быть описано в протоколе испытаний, чтобы помочь в уточнении, объяснении и воспроизведении уникальных или аномальных результатов испытаний.
от пола камеры. Напольное испытуемое оборудование должно поддерживаться на высоте 10 см над полом диэлектрической подставкой с низкими потерями в области под равномерным объемом. Расположение испытательного оборудования и кабелей должно быть описано в протоколе испытаний, чтобы помочь в уточнении, объяснении и воспроизведении уникальных или аномальных результатов испытаний.
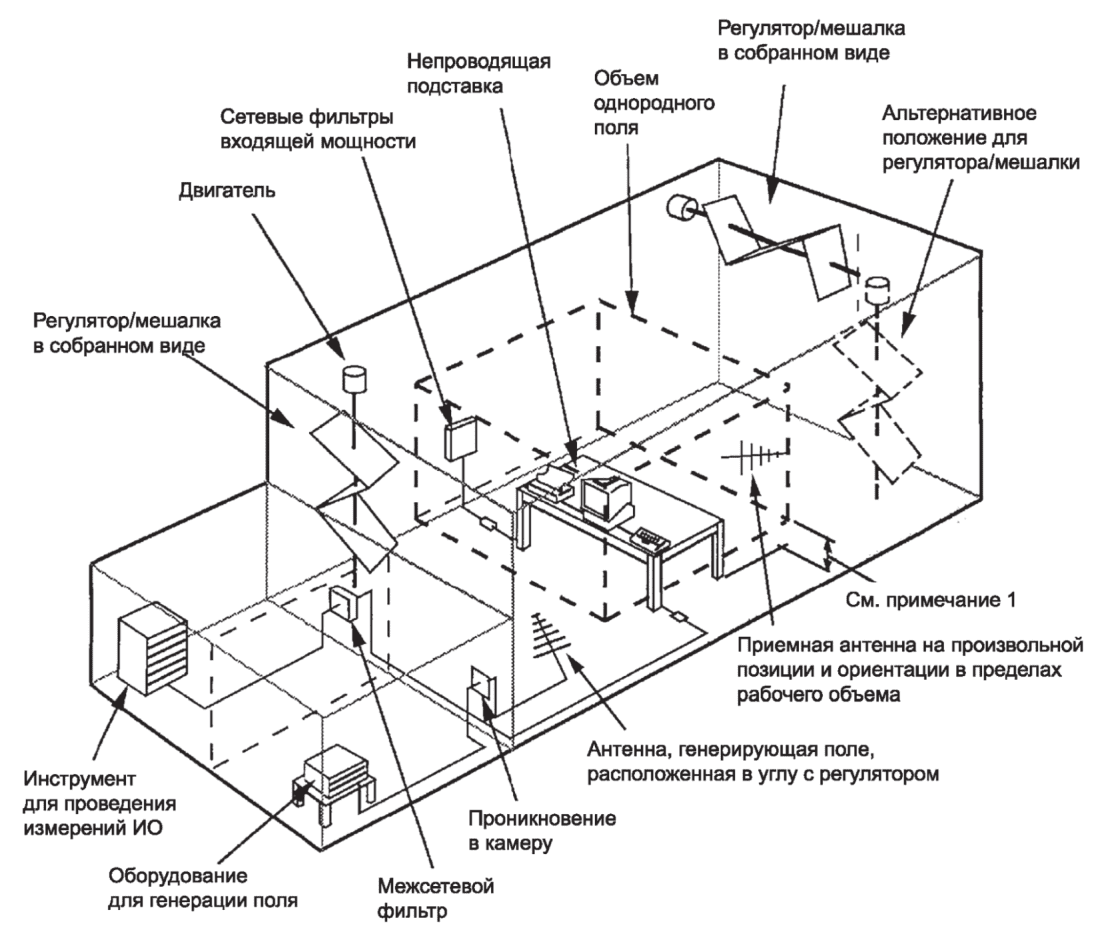
Примечание 1 - Испытательный объем должен составлять не менее  на выходе из любой поверхности камеры, антенны, генерирующей поле, или узла регулятора (см. примечание 5 к рисунку B.1).
на выходе из любой поверхности камеры, антенны, генерирующей поле, или узла регулятора (см. примечание 5 к рисунку B.1).
Примечание 2 - Может использоваться непроводящая/непоглощающая подставка, если для правильной работы ИО не требуется плоскость заземления.
Примечание 3 - Пенополистирол в большинстве случаев является подходящей подставкой.
Внимание! Вспененные материалы могут представлять опасность возгорания при выделении ИО достаточного количества тепла и/или при испытании на напряженность поля, которая может вызвать образование дуги.
В камере не должно быть никаких ненужных поглощающих материалов. Запрещается использовать такие предметы, как деревянные столы, ковры, настенные и напольные покрытия, а также потолочную плитку. Открытые светильники также являются источником потенциальной нагрузки. Для новых камер рекомендуется провести оценку камеры перед установкой любого вспомогательного оборудования, кроме дверей, вентиляционных отверстий и панелей доступа. Вспомогательное оборудование, такое как столы и т.д., должно быть неметаллическим и с низким поглощением. Испытуемое оборудование и все вспомогательное оборудование не должны занимать более 8% от общего объема камеры.
Передающая антенна должна находиться в том же месте, что и та, которая использовалась для проверки. Передающая антенна не должна непосредственно освещать испытуемое оборудование или приемную антенну. Рекомендуемой конфигурацией является направление антенн в углы камеры. Должны быть установлены соответствующие режимы работы, установка программного обеспечения и стабильность испытуемого оборудования, испытательного оборудования и всех цепей контроля и нагрузок.
Перед сбором данных должна быть проведена проверка, чтобы определить, не могло ли испытуемое оборудование и/или его вспомогательное оборудование оказывать неблагоприятное воздействие на камеру. Эта проверка должна выполняться, как описано в разделе B.2. Если используются процедуры в режиме перемешивания, то следует позаботиться о том, чтобы проблемы, связанные с перемешиванием, как указано в приложении C, были надлежащим образом устранены.
D.3 Процедуры испытания на помехоустойчивость к излучаемым помехам
D.3.1 Предупреждение
Внимание! Радиочастотные поля могут быть опасными. Соблюдайте применимые национальные нормы на радиочастотные воздействия.
D.3.2 Определение требований к входной мощности камеры
Определите входную мощность камеры (в Вт), которая требуется для соответствия требованиям испытаний по напряженности электрического поля, используя уравнение:
 (D.1)
(D.1)где PInput - прямая мощность, Вт, подаваемая в камеру для достижения желаемой напряженности поля для испытания на помехоустойчивость;
Etest - требуемая напряженность поля, В/м, для испытания на помехоустойчивость;
CLF(f) - коэффициент нагрузки камеры (безразмерный) на частоте f (см. раздел B.2 (7));
 - среднее значение нормализованного электрического поля, (V/m)/W0,5, полученного в результате проверки пустой камеры (см. B.1.2 (10) (b) или (c)). Необходимо будет выполнить линейную интерполяцию между точками частоты проверки, в то время как проверка с более мелким интервалом шагов также является опцией.
- среднее значение нормализованного электрического поля, (V/m)/W0,5, полученного в результате проверки пустой камеры (см. B.1.2 (10) (b) или (c)). Необходимо будет выполнить линейную интерполяцию между точками частоты проверки, в то время как проверка с более мелким интервалом шагов также является опцией.D.3.3 Выбор частоты развертки/ступенчатых скоростей/интервалов
D.3.3.1 Общие положения
Частота развертки или ступенчатые скорости должны выбираться с учетом времени отклика испытуемого оборудования (ИО), ширины полосы пропускания, восприимчивого ИО, и времени отклика ИО для мониторинга. Выбранная скорость сканирования должна быть обоснована этим критерием и задокументирована в протоколе испытаний.
Если иное не указано в плане испытания, для выбора испытательных частот будут использоваться следующие рекомендации.
D.3.3.2 Дискретность частоты при проведении испытаний
Для испытательного оборудования, генерирующего дискретные частоты, минимальное количество испытательных частот должно составлять 100 частот в декаду. Испытательные частоты должны располагаться с логарифмическим интервалом. В качестве примера (выше 100 МГц) уравнение, которое может быть использовано для вычисления этих частот в порядке возрастания, выглядит следующим образом [4] <6>:
 (D.2)
(D.2)где n - целое число;
n = от 1 до N при N >= 100;
fn - n-я испытательная частота (f1 - начальная частота, а fN - конечная частота).
--------------------------------
<6> Цифры в квадратных скобках относятся к разделу D.6 "Справочные документы" в конце настоящего приложения.
Время выдержки на каждой испытательной частоте должно составлять не менее 0,5 с без учета времени срабатывания испытательного оборудования и времени, необходимого для поворота регулятора (до полной остановки) (см. приложение C в части предостережений при перемешивании). Следовательно, минимальное время испытания для одной декады частот никогда не должно быть меньше 50 с для каждого положения регулятора. Дополнительное время ожидания на каждой испытательной частоте может потребоваться для обеспечения возможности использования ИО в соответствующих рабочих режимах и для обеспечения "времени выключения" во время низкочастотной модуляции. Должно быть применено не менее двух полных циклов модуляции. Например, если применяемая модуляция представляет собой модуляцию прямоугольной волны (SW) частотой 1 Гц, то время задержки должно составлять не менее 2 с. Выбранное время выдержки должно быть обосновано с учетом ИО и времени срабатывания испытательного оборудования, а также применяемой модуляции, и задокументировано в протоколе испытаний.
D.3.3.3 Частота развертки при проведении испытаний
Возбуждение со смещаемой частотой может привести к тому, что поле камеры станет нестационарным [5], [6].
Следовательно, должны использоваться дискретные частоты, если только частота развертки не указана комитетом на продукцию. Не рекомендуется использовать перемешивание в сочетании с испытанием на частоту развертки.
Примечание - Дополнительные испытательные частоты должны быть включены для известных частот отклика оборудования, таких как частоты изображения IFs, тактовые частоты и т.д. В конкретных испытаниях, требованиях производителя или правительства/регулирующих органов могут быть указаны конкретная частота сканирования или частотный интервал(ы), которые имеют приоритет.
D.4 Проведение испытаний
Поскольку реверберационная камера, в отличие от большинства других средств испытаний электромагнитной совместимости, не поддерживает плоские волны при заданном положении (угле) режима регулятора или мешалки, условия распространения и возбуждения ИО отличаются от условий в среде свободного пространства. Следовательно, предпочтительные испытательные уровни и связанные с ними доверительные интервалы могут существенно отличаться от таковых в других испытательных установках. Максимальная или средняя плотность мощности, в отличие от напряженности поля, является предпочтительной величиной ввиду физико-статистической природы полей внутри реверберационной камеры.
Проведите испытание, используя процедуры либо в режиме регулятора, либо в режиме перемешивания. Для работы в режиме регулятора используйте минимальное количество шагов, указанное при проверке камеры. Регулятор следует вращать с равномерно распределенными шагами, чтобы получить один полный оборот на частоту. Если используются процедуры в режиме перемешивания, должно быть обеспечено, чтобы ИО подвергался воздействию по меньшей мере такого же количества образцов, какое было на оборудовании для проверки во время проверки.
Убедитесь, что для любой процедуры ИО подвергается воздействию уровня поля в течение соответствующего времени выдержки. Это особенно важно при работе в режиме перемешивания.
Примечание 1 - Проверка камеры позволяет сократить количество этапов до 12, если данные указывают на то, что может быть достигнута приемлемая эффективность камеры.
Контролируйте и записывайте PMaxRec и PAveRec с помощью приемной антенны, используемой при проверке каждой полосы частот, чтобы убедиться, что генерируется требуемая напряженность поля. Используйте PAveRec, чтобы убедиться, что нагрузка камеры не изменилась по сравнению с проверкой, указанной в разделе D.2. Различия, превышающие 3 дБ в PAveRec, по сравнению с данными, полученными в разделе D.2, должны быть устранены. PMaxRec также может использоваться для оценки генерируемого пикового электрического поля, как описано в приложении A.
Контролируйте и записывайте средние значения PInput и PReflected. Отклонения в выводе при повороте регулятора более чем на 3 дБ должны быть отмечены в протоколе испытаний.
Модулируйте несущую, как указано в плане испытаний. При применении модуляции убедитесь, что пиковая амплитуда соответствует определениям плана испытаний.
Сканируйте частотный диапазон до верхнего предела частоты, используя соответствующие антенны и модуляции.
Примечание 2 - При использовании импульсной модуляции убедитесь, что выполнены требования раздела B.3.
Примечание 3 - Потребуется линейная интерполяция между точками проверки.
D.5 Протокол испытаний
Протокол испытаний должен включать схему прокладки кабелей и расположение ИО относительно кабелей, а также схему испытательной установки и/или фотографии.
Кроме того, протокол должен включать следующие параметры для каждой частоты испытаний, в дополнение к требованиям к отчетности, связанным с ИО:
a) максимальная принимаемая мощность от приемной антенны, используемой для мониторинга поля в камере;
b) значение принимаемой мощности от приемной антенны, используемой для мониторинга поля в камере;
c) прямая мощность, подаваемая на передающую антенну камеры;
d) отраженная мощность от передающей антенны камеры;
e) колебания мощности прямой передачи, превышающие 3 дБ, в течение периода сбора данных;
f) различия более чем на 3 дБ между уровнями поля, основанными на входной мощности камеры и рассчитанными с использованием методов A.5.4, которые не удалось устранить.
[1] | KOEPKE G. and HILL D. Test device directivity for EMC measurements, Proc. IEEE Int. Symp. EMC, Washington, DC, 23 Aug. 2000, pp. 535 - 539 |
[2] | FREYER G.J. and  M. Comparison of anechoic & reverberation chamber transfer function data as a function of directivity magnitude and pattern, Proc. IEEE Int. Symp. EMC, Washington, DC, 23 Aug. 2000, pp. 615 - 620 M. Comparison of anechoic & reverberation chamber transfer function data as a function of directivity magnitude and pattern, Proc. IEEE Int. Symp. EMC, Washington, DC, 23 Aug. 2000, pp. 615 - 620 |
[3] | FREYER G.J. and  M. Comparison of anechoic and reverberation chamber coupling data as a function of directivity pattern - Part II, Proc. IEEE Int. Symp. EMC, Montreal, Canada, Aug. 2001, pp. 286 - 291 M. Comparison of anechoic and reverberation chamber coupling data as a function of directivity pattern - Part II, Proc. IEEE Int. Symp. EMC, Montreal, Canada, Aug. 2001, pp. 286 - 291 |
IEC 61000-4-3, Electromagnetic compatibility (EMC) - Part 4-3: Testing and measurement techniques - Radiated, radio-frequency, electromagnetic field immunity test | |
ARNAUT L.R. On the maximum rate of fluctuation in mode-stirred reverberation, IEEE Trans. EMC, vol. 47, no. 4, pp. 781 - 804, Nov. 2005 | |
ARNAUT L.R. Maximum rates of frequency scanning and mechanical or electronic stirring for distortionless signal generation inside electromagnetic reverberation chambers, Proc. 2008 EMC Europe Symposium, Hamburg-Harburg, Germany, 8 - 12 Sep. 2008 |
(обязательное)
E.1 Обзор
В этом приложении описывается использование реверберационных камер для измерения мощности излучений [1] <7> (как преднамеренных, так и/или непреднамеренных). Это приложение не охватывает всех нюансов измерений выбросов. Информацию об измерительном оборудовании можно найти в CISPR 16-1-1. В целом информация, содержащаяся в CISPR 16-1-1, применяется без изменений при проведении измерений с использованием реверберационной камеры.
--------------------------------
<7> Цифры в квадратных скобках относятся к разделу E.11 "Справочные документы" в конце настоящего приложения.
Есть два исключения, которые требуют дополнительного рассмотрения:
a) искажение импульсов короткой длительности (обычно определяемое как менее 10 мкс) добротностью камеры Q; и
b) видимое изменение амплитуды излучаемого сигнала из-за движения механического регулятора/мешалки.
Определение подходящей камеры Q (т.е. постоянной времени) можно найти в разделе B.3. Влияние регулятора/мешалки следует учитывать при выборе времени выдержки или скорости вращения и при выборе типа используемого детектора.
E.2 Испытательная установка
Информация об испытательной установке, содержащаяся в CISPR 16-2-3, применима к проведению испытаний в реверберационной камере. Единственными дополнительными требованиями являются то, что испытуемое оборудование должно находиться на расстоянии не менее  от стен камеры, а напольные ИО должны поддерживаться на высоте 10 см над полом посредством диэлектрической подставки с низкими потерями или диэлектрической проницаемостью. Допускается использование заземленной плоскости, если это необходимо для правильной работы ИО. Кроме того, устраняется необходимость манипулировать положением интерфейсных кабелей, а опорный стол должен быть как непоглощающим, так и непроводящим. Типичная испытательная установка показана на рисунке E.1.
от стен камеры, а напольные ИО должны поддерживаться на высоте 10 см над полом посредством диэлектрической подставки с низкими потерями или диэлектрической проницаемостью. Допускается использование заземленной плоскости, если это необходимо для правильной работы ИО. Кроме того, устраняется необходимость манипулировать положением интерфейсных кабелей, а опорный стол должен быть как непоглощающим, так и непроводящим. Типичная испытательная установка показана на рисунке E.1.
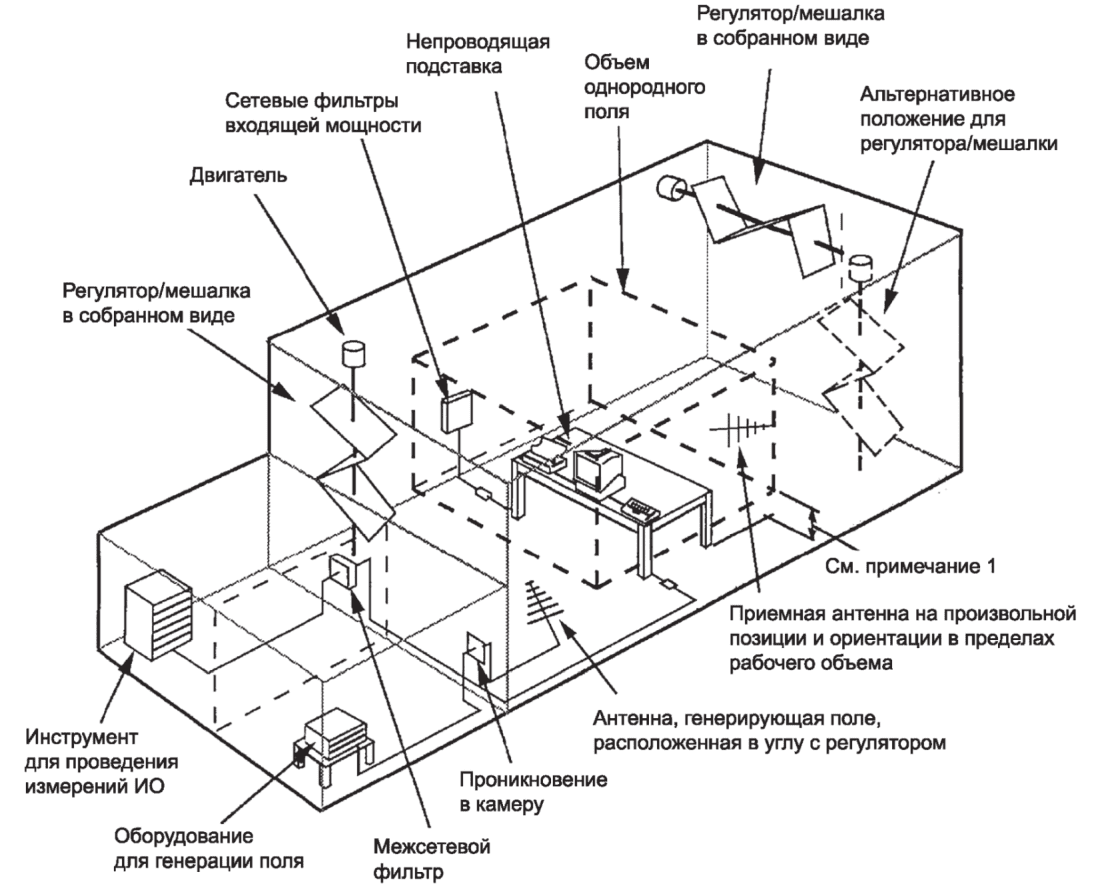
Примечание 1 - Испытательный объем должен составлять не менее  на выходе из любой поверхности камеры, антенны, генерирующей поле, или узла регулятора (см. примечание 5 к рисунку B.1).
на выходе из любой поверхности камеры, антенны, генерирующей поле, или узла регулятора (см. примечание 5 к рисунку B.1).
Примечание 2 - Следует использовать непроводящую/непоглощающую подставку, если для правильной работы ИО не требуется плоскость заземления.
Примечание 3 - Пенополистирол в большинстве случаев является подходящей подставкой. Пеноматериалы могут представлять опасность возгорания, если ИО выделяет достаточное количество тепла.
Примечание 4 - В камере не должно быть никаких ненужных поглощающих материалов. Не следует использовать такие предметы, как деревянные столы, ковровые покрытия, напольные и настенные покрытия, а также потолочную плитку. Кроме того, открытые светильники являются источником потенциальной нагрузки. Для новых камер рекомендуется провести оценку камеры перед установкой любого вспомогательного оборудования, кроме дверей, вентиляционных отверстий и панелей доступа. Вспомогательное оборудование, такое как столы и т.д., должно быть неметаллическим и непоглощающим.
Антенна Tx (используемая во время проверки камеры для проверки нагрузки камеры) должна оставаться в камере в том же месте, которое использовалось для проверки. Антенна Tx не должна непосредственно облучать ИО или антенну Rx. Антенна Rx не должна непосредственно облучать ИО (т.е. антенна Rx не должна быть направлена на ИО). Направление антенн в углы камеры является оптимальной конфигурацией. Установите установку программного обеспечения, режимы работы и стабильность ИО, испытательного оборудования и всех цепей мониторинга и нагрузок.
Перед сбором данных должна быть проведена проверка, чтобы определить, не оказали ли испытуемое оборудование и/или его вспомогательное оборудование неблагоприятной нагрузки на камеру. Эта проверка должна выполняться, как указано в разделе B.2. Если используются процедуры перемешивания в режиме перемешивания, необходимо позаботиться о том, чтобы надлежащим образом устранить проблемы, связанные с перемешиванием, описанные в приложении C. После выполнения проверки нагрузки передающая антенна должна быть подключена к характеристическому сопротивлению, эквивалентному источнику радиочастотного излучения, использованному во время проверки.
Примечание - Радиочастотные поля могут быть опасными. Соблюдайте применимые национальные нормы радиочастотного воздействия.
Проведите испытание, используя процедуры либо с режимом регулировки, либо в режиме перемешивания. Убедитесь, что для любой процедуры ИО проверяется по крайней мере таким количеством выборок, какое было на оборудовании для проверки во время проверки. Для работы с режимом регулировки используйте минимальное количество выборок, указанное при проверке камеры.
Регулятор следует вращать с равномерно распределенными шагами, чтобы получить один полный оборот на частоту. Если используются процедуры в режиме перемешивания, то должно быть обеспечено, чтобы излучаемые помехи от ИО измерялись по крайней мере из того количества выборок, которое было взято во время проверки камеры. Как и в случае с режимом регулировки, выборки в режиме перемешивания должны быть равномерно распределены в течение одного полного оборота регулятора.
Для любой процедуры убедитесь, что ИО контролируется на каждом образце в течение периода времени, достаточного для обнаружения всех выбросов (см. CISPR 16-2-3 для указания времени сканирования приемника).
Это особенно важно при работе в режиме перемешивания. Процедуры в режиме перемешивания следует применять только для немодулированных сигналов, использующих пиковый детектор. Из-за изменения амплитуды принимаемого сигнала, вызванного вращением регулятора, время испытания обычно увеличивается, если используется пиковый детектор. Режим перемешивания неприменим при использовании среднего или другого весового детектора.
Для модулированных (т.е. несинусоидальных) излучений будет измеряться средняя мощность излучения (т.е. усредненная по полосе разрешения) в пределах полосы измерения, если используется среднеквадратичный детектор. Если спектр излучения шире, чем полоса пропускания измерения, общая излучаемая мощность может быть измерена путем интегрирования спектральной плотности мощности по спектру излучения, связанному с модуляцией.
Измерьте и запишите PMaxRec и/или PAveRec, как указано в плане испытаний, с помощью антенны Rx, используемой при проверке каждой полосы частот.
Внимание! Для получения точного измерения PAveRec минимальный уровень шума приемного оборудования должен быть не менее чем на 20 дБ ниже PMaxRec.
Сканируйте частотный диапазон до верхнего предела частоты, используя соответствующие антенны и полосы пропускания. Время сканирования для этой процедуры должно соответствовать времени, указанному в плане испытания.
Измерение величины мощности, принимаемой приемной антенной, и корректировка потерь в камере могут быть использованы для определения величины радиочастотной мощности (в пределах полосы пропускания измерения), излучаемой устройством, размещенным в камере. В настоящем стандарте излучаемая мощность определяется методом замещения [2] с использованием данных проверки камеры, дополненных поправочным коэффициентом, который учитывает нагрузку камеры излучающим ИО.
Мощность, излучаемая устройством, может быть определена с использованием либо средней, либо максимальной принимаемой мощности по следующим уравнениям:
где PRadiated - мощность, излучаемая устройством (в пределах измерительной полосы пропускания);
CVF - коэффициент проверки камеры (см. раздел B.2 (6));
CLF - коэффициент нагрузки камеры (см. раздел B.2 (7));
IL - вносимые потери в камере (см. B.1.4);
PAveRec - принимаемая мощность (в пределах измерительной полосы пропускания), измеренная эталонной антенной, усредненная по количеству шагов регулятора (см. раздел E.4);
PMaxRec - максимальная мощность, полученная (в пределах измерительной полосы пропускания) за указанное количество шагов регулятора (см. раздел E.4);
Уравнение (E.1) используется для измерений на основе средней принятой мощности, а уравнение (E.2) используется для измерений на основе максимальной принятой мощности. Преимуществом использования измерений, основанных на средней мощности, является меньшая неопределенность. Недостатком является то, что измерительная система должна иметь чувствительность на 20 дБ ниже, чем измеренный PMaxRec, чтобы получить точное среднее измерение.
Примечание - Были предложены другие методы измерения излучения радиопомех, которые исключают необходимость предварительной проверки камеры, но используют измерение затухания импульса во временной области с использованием ИО в качестве источника [3]. С учетом того факта, что Q-фактор, определенный в результате измерения затухания импульса (см. уравнение (A.11) для измеренного  ), может отличаться от его значения, полученного в результате измерений постоянного волны (см. уравнение (A.10)), эти методы дают сопоставимые результаты для расчетной общей мощности излучения с результатами, полученными с использованием уравнения (E.1).
), может отличаться от его значения, полученного в результате измерений постоянного волны (см. уравнение (A.10)), эти методы дают сопоставимые результаты для расчетной общей мощности излучения с результатами, полученными с использованием уравнения (E.1).
E.6 Оценка поля свободного пространства (в дальней зоне), генерируемого испытуемым оборудованием
Напряженность поля, генерируемого ИО на расстоянии R метров, может быть оценена с помощью следующего уравнения:
где ERadiated - расчетная напряженность поля, генерируемого ИО, В/м;
PRadiated - мощность излучения из раздела E.5, Вт;
R - расстояние от ИО, м (должно быть достаточным расстоянием для обеспечения условий дальнего поля);
D - максимальная направленность ИО (безразмерный).
Примечание - Часто используется значение направленности D = 1,7, поскольку оно представляет собой предположение о том, что диаграмма направленности ИО является эквивалентом дипольного излучателя длиной от половины до одной полной длины волны. Рекомендуется использовать коэффициент 1,7, если только комитет по продуктам не может предоставить более подходящее значение. Недавние исследования направленности устройства можно найти в [4], [5].
Рассчитанная напряженность поля радиопомех не всегда совместима с результатами измерений, полученными на испытательных площадках на открытой местности (OATSs) или аналогичных испытательных площадках. Эта совместимость, если требуется, должна быть подтверждена специальными процедурами для типов ИО или групп продуктов.
E.7 Оценка полупространственного (дальнего) поля, генерируемого испытуемым оборудованием
Напряженность поля, генерируемого ИО на расстоянии R метров на высоте h над идеальной проводящей заземленной плоскостью, может быть оценена с помощью следующего уравнения:
 (E.4)
(E.4)где символы имеют то же значение, что и в уравнении (E.3), и где
gmax - безразмерный геометрический коэффициент, учитывающий отражения от земной поверхности.
Геометрический фактор учитывает сканирование по высоте, которое обычно выполняется в условиях полупространства и задается следующим уравнением:
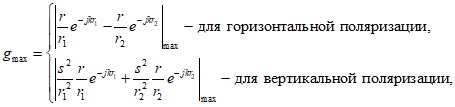 (E.5)
(E.5)где  - расстояние от антенны до перпендикулярного основания ИО, м;
- расстояние от антенны до перпендикулярного основания ИО, м;
- расстояние от антенны до перпендикулярного основания ИО, м; - длина прямого луча, м;
- длина прямого луча, м; - длина отраженного луча, м;
- длина отраженного луча, м;s - расстояние измерения, м;
Rh - высота антенны, м.
Соответствующая геометрия показана на рисунке E.2. Максимальное значение берется по отношению к развертке приемной антенны по высоте (параметр Rh). Для типичного измерения OATS (s = 10 м, h = 1 м, сканирование по высоте от 1 до 4 м) gmax приблизительно равен 2 для частот выше 200 МГц, как для горизонтальной, так и для вертикальной поляризации. Процедуры преобразования излучаемой мощности, оцененные по результатам измерений датчиком электрического поля и со ссылкой на измерения OATS, были продемонстрированы в [6] и [7] соответственно.
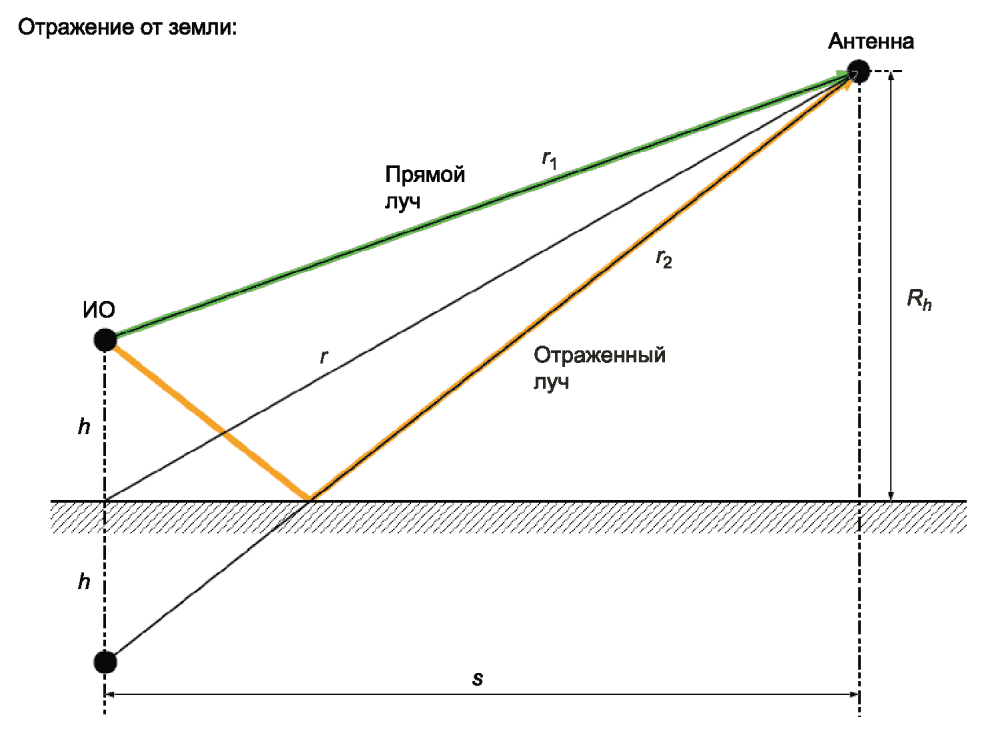
геометрического коэффициента для излучаемых радиопомех
E.8 Максимальная направленность
Для электрического или магнитного диполя, который является коротким по сравнению с длиной волны, максимальная направленность равна 1,5. Для комбинации магнитного и электрического диполей максимальная направленность равна 3. Для электрически большого ИО предположение о дипольном излучении обычно недостаточно точно, что приводит к большей максимальной направленности. При условии что излучение ИО достаточно близко к всенаправленному излучению, помимо отображения узких изолированных лучей в определенных направлениях, ожидаемая максимальная направленность D для непреднамеренного излучателя может быть аппроксимирована на основе радиуса a наименьшей окружающей сферы:

Рекомендуется использовать максимальное значение D = 3 для дипольного излучения или D в соответствии с уравнением (E.6), если только комитет по продуктам не может предоставить более подходящее значение.
E.9 Неопределенность измерения
Для оценки неопределенности измерений, связанной с излучением, см. приложение K и [8]. В общем случае неопределенность зависит от несоответствия импедансов ИО и приемной антенны, а также от вносимых потерь пустой камеры.
E.10 Протокол испытания
Протокол испытаний должен включать следующие параметры для каждой частоты испытаний, в дополнение к требованиям к отчетности, связанным с ИО:
a) максимальную принимаемую мощность от приемной антенны, если она записана;
b) среднюю мощность, полученную от приемной антенны, если она записана;
c) мощность, излучаемую ИО, как определено в разделе E.5;
d) если требуется сообщить расчетное электронное поле, то также должна быть указана предполагаемая направленность, используемая для расчета электрического поля (см. уравнение (E.3));
e) данные нагрузки в соответствии с требованиями раздела E.3;
f) расположение кабелей и расположение ИО относительно кабелей;
g) схему испытательной установки (например, фотографии).
HARRINGTON T.E. Total-radiated-power-based OATS-equivalent emissions testing in reverberation chambers and GTEM cells, Proc. IEEE Int. Symp. EMC, Washington, DC, 22 Aug. 2000, pp. 23 - 28 | |
CORONA P., LATMIRAL G., PAOLINI E. and PICCIOLI L. Use of a reverberating enclosure for measurements of radiated power in the microwave range, IEEE Trans. EMC, vol. 18, no. 2, May 1976, pp. 54 - 59; Comments and corrections, IEEE Trans. EMC, vol. 18, no. 4, Nov. 1976, p. 205 | |
 H.G. On the measurement of total radiated power in uncalibrated reverberation chambers, IEEE Trans. EMC, vol. 49, no. 2, pp. 270 - 279, May 2007 H.G. On the measurement of total radiated power in uncalibrated reverberation chambers, IEEE Trans. EMC, vol. 49, no. 2, pp. 270 - 279, May 2007 | |
 M., M.,  H-J. Microwave Coupling into a Generic Object. Properties of Measured angular Receiving Pattern and its Significance for Testing, Proc. IEEE Int. Symp. EMC, Montreal, Canada, Aug. 13 - 17, 2001, pp. 1227 - 1232 H-J. Microwave Coupling into a Generic Object. Properties of Measured angular Receiving Pattern and its Significance for Testing, Proc. IEEE Int. Symp. EMC, Montreal, Canada, Aug. 13 - 17, 2001, pp. 1227 - 1232 | |
WILSON P., KOEPKE G., LADBURY J. and HOLLOWAY C.L. Emission and Immunity standards: Replacing Field-at-a-Distance Measurements with Total-Radiated Power Measurements, Proc. IEEE Int. Symp. EMC, Montreal, Canada, Aug. 13 - 17, 2001, pp. 964 - 969 | |
GARBE H. and BATTERMAN S. Converting total-radiated-power measurements to equivalent E-field data, Proc. IEEE Int. Symp. EMC, Detroit, MI, August 18 - 22, 2008 | |
VAN DIJK N. New concepts for EMC standards applicable to multimedia products, Doctoral Thesis, TU Eindhoven University Press, Eindhoven, The Netherlands, Jun. 2007 [http://alexandria.tue.nl/extra2/200710787.pdf] | |
ARNAUT L.R. Measurement uncertainty in reverberation chambers - I. Sample statistics, National Physical Laboratory (UK), Report TQE 2, Ed. 2.0, Dec. 2008 [http://publications.npl.co.uk/npl_web/pdf/TQE2.pdf] |
(справочное)
КАБЕЛЬНЫХ УЗЛОВ, КАБЕЛЕЙ, СОЕДИНИТЕЛЕЙ, ВОЛНОВОДОВ
И ПАССИВНЫХ МИКРОВОЛНОВЫХ КОМПОНЕНТОВ
F.1 Измерение эффективности экранирования испытуемого оборудования
Как и при испытании на помехоустойчивость к излучаемым помехам, существует множество методов испытаний для оценки эффективности экранирования прокладок, оконных материалов и других конфигураций систем, предназначенных для обеспечения экранирования [1] <8>, [2], [3]. Измерение эффективности экранирования в этом приложении основано на сравнении электромагнитной мощности вне ИО с электромагнитной мощностью, индуцируемой в ИО. Эффективность экранирования SE определяется как
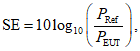 (F.1)
(F.1)где PEUT - мощность, подаваемая на испытуемое оборудование, Вт;
PRef - мощность, подаваемая на эталонную антенну, Вт.
--------------------------------
<8> Цифры в квадратных скобках относятся к разделу F.5 "Справочные документы" в конце настоящего приложения.
F.2 Описание испытательной установки
F.2.1 Реверберационная камера
Экранированный корпус должен быть модифицирован по крайней мере одним дополнительным портом доступа для облегчения подключения ИО. Некоторым ИО может потребоваться несколько портов доступа.
F.2.2 Антенны
Передающая и эталонная антенны те же, что использовались при проверке камеры.
F.2.3 Испытательная установка
Испытательное оборудование и компоненты, обычно используемые для автоматического измерения эффективности экранирования, показаны на рисунке F.1. Обратите внимание, что для получения желаемого динамического диапазона также могут потребоваться предусилители, усилители и другие компоненты.
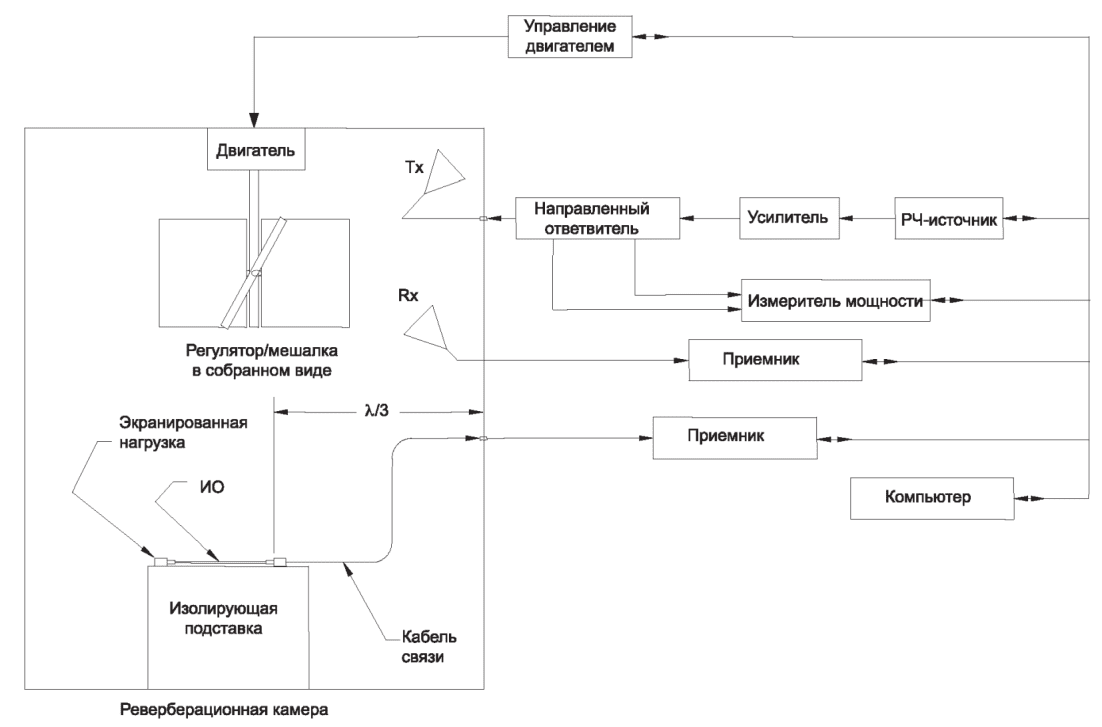
F.2.4 Испытуемое оборудование
ИО подключается к измерительному оборудованию через соответствующую среду (например, коаксиальный кабель, волновод и т.д.). Чтобы гарантировать, что ИО находится в пределах объема однородного поля, это соединение должно иметь длину не менее 1/3 длины волны на самой низкой испытательной частоте. Испытательный порт ИО должен быть подключен к измерительному оборудованию. Любой другой порт(ы) должен быть подключен к согласованным нагрузкам, эффективность экранирования которых по крайней мере на 5 дБ выше, чем у ИО (или по крайней мере на 10 дБ выше желаемого экранирования).
F.2.5 Соединительные устройства
Соединительные устройства обычно представляют собой коаксиальные линии 50 Ом, эффективность экранирования которых по меньшей мере на 10 дБ выше, чем у ИО (или по меньшей мере на 10 дБ выше желаемого экранирования).
Перед началом испытания все соединительные устройства должны быть проверены на ослабление. Это включает в себя соединительные устройства как для ИО, так и для эталонной антенны. См. рисунок F.1.
F.3 Процедура измерения
F.3.1 Общие положения
Проведите испытание, используя процедуры режима регулировки или режима перемешивания. Для работы в режиме регулировки применяют по крайней мере то же количество шагов, что было применено при проверке камеры. Это делается для того, чтобы гарантировать, что неопределенность измерения такая же или лучше, чем при проверке камеры. Регулятор следует вращать с равномерно распределенными шагами, чтобы получить один полный оборот на частоту. Для работы в режиме перемешивания максимальная частота вращения регулятора должна выбираться таким образом, чтобы на ИО (т.е. на измерительный приемник) поступало по меньшей мере такое же количество выборок, какому подвергалось оборудование для проверки при проведении проверки. Для любой процедуры убедитесь, что ИО находится на нужном уровне поля в течение соответствующего времени выдержки, особенно при работе в режиме ожидания. Если используются процедуры режима перемешивания, то следует позаботиться о том, чтобы надлежащим образом решить проблемы, связанные с перемешиванием, описанные в приложении C.
Примечание - Измерения SE обычно хорошо подходят для использования перемешивания, при условии, что ИО и контрольное оборудование имеют быстрое время отклика, что обычно имеет место для измерений такого типа.
Измеряемым параметром может быть либо средняя принимаемая мощность, либо максимальная принимаемая мощность. Средняя полученная мощность даст более точное измерение. Однако для сбора точных средних данных требуется чувствительность измерения по крайней мере на 20 дБ ниже максимальной принимаемой мощности. Для измерений, основанных на максимальной принятой мощности, динамический диапазон измерительной системы должен быть по крайней мере на 10 дБ больше, чем желаемая эффективность экранирования.
F.3.2 Измерение испытуемого оборудования
Радиочастотный генератор подключается к антенне внутри камеры (через усилитель, при необходимости) и подает в камеру постоянную входную мощность на фиксированной частоте. Регулятор/мешалка управляется желаемым образом.
Измерительное оборудование подключено к ИО. Эталонная антенна камеры подключена к контрольному оборудованию камеры.
После соответствующего количества отсчетов или одного оборота регулятора желаемый параметр (т.е. средняя принимаемая мощность или максимальная принимаемая мощность) записывается для каждой испытательной частоты как для эталонной антенны, так и для ИО.
Затем эффективность экранирования может быть рассчитана с учетом ослабления линий связи как для ИО, так и для эталонной антенны.
Примечание - Не смешивайте параметры! Сравните максимальную мощность, получаемую антенной, с максимальной мощностью, получаемой ИО, или среднюю мощность, получаемую антенной, со средней мощностью, получаемой ИО.
F.3.3 Альтернативный метод измерения ИО
Если два комплекта измерительного оборудования недоступны, то измерительное оборудование может быть подключено к ИО и эталонной антенне по очереди для каждого измерения.
Если используются два набора линий связи, то эффективность экранирования должна быть рассчитана с учетом ослабления линий связи как для ИО, так и для эталонной антенны.
Если используется только один набор линий связи, то ослаблением линии связи можно пренебречь, а эффективность экранирования равна разнице между двумя принимаемыми мощностями (максимальной или средней).
F.4 Управление испытательной установкой
Перед любыми измерениями динамический диапазон испытательной установки должен быть проверен с использованием тех же соединительных устройств и окончаний, что и для испытуемого оборудования, за исключением того, что ИО будет заменен хорошо экранированным устройством. Динамический диапазон должен быть по крайней мере на 5 дБ больше, чем желаемая эффективность экранирования.
IEC 61726, Cable assemblies, cables, connectors and passive microwave components - Screening attenuation measurement by the reverberation chamber method (Кабельные узлы, кабели, соединители и пассивные микроволновые компоненты. Измерение затухания экранирования методом реверберационной камеры) | |
IEC 60169-1-3, Radio-frequency connectors - Part 1: General requirements and measuring methods - Section Three - Electrical tests and measuring procedures: Screening effectiveness (Радиочастотные соединители. Часть 1. Общие требования и методы измерений. Раздел 3. Электрические испытания и процедуры измерений: эффективность экранирования) | |
IEC 61000-5-7, Electromagnetic compatibility (EMC) - Part 5-7: Installation and mitigation guidelines - Degrees of protection provided by enclosures against electromagnetic disturbances (EM code) (Электромагнитная совместимость (EMC). Часть 5-7. Рекомендации по монтажу и защите от электромагнитных помех. Степени защиты, обеспечиваемые корпусами от электромагнитных помех (EM-код)) |
(справочное)
G.1 Обзор
Как и при испытании на помехоустойчивость к излучаемым помехам, существует множество методов испытаний для оценки эффективности экранирования прокладок, оконных материалов и других конфигураций систем, предназначенных для обеспечения экранирования [1] <9>, [2], [3]. Как правило, при измерении эффективности экранирования (SE) сравнивается электромагнитная среда (EM) внутри корпуса с установленным защитным материалом или прокладкой и без них. Методы испытания эффективности экранирования (SE) описаны во многих справочных источниках, таких как MIL-STD-285 [12]. К сожалению, многие измерения эффективности экранирования отличаются недостаточной повторяемостью и сопоставимостью между объектами. Некоторые из этих несоответствий могут быть отнесены к методике испытания, в то время как само испытуемое изделие вызывает другие. Многие факторы, такие как состояние сопрягаемых поверхностей и затяжка крепежных элементов, могут заметно повлиять на повторяемость измерений эффективности экранирования (SE).
--------------------------------
<9> Цифры в квадратных скобках относятся к разделу G.7 "Справочные документы" в конце настоящего приложения.
Для многих конструкций экранирования (например, прокладок, окон и т.д.) при испытании реверберации используется подход вложенной камеры (т.е. реверберационная камера внутри реверберационной камеры). Приемная антенна и регулятор с лопастным колесом установлены в испытательном приспособлении для обнаружения любой радиочастотной энергии, которая просачивается в приспособление. Читателям, которые не знакомы с использованием реверберационных камер для измерений SE, следует ознакомиться с одной или несколькими из доступных ссылок: [4], [5], [6], [7].
Многие факторы испытательной установки должны тщательно контролироваться для достижения повторяемости испытания эффективности экранирования (SE). Предполагая, что можно контролировать эти факторы, однородность электромагнитной среды в реверберационной камере обеспечивает всестороннее испытание эффективности экранирования (SE) с превосходной повторяемостью от объекта к объекту.
Примечание 1 - Незначительные различия в конструкции испытательного приспособления могут оказать существенное влияние на результаты испытаний. Материалы крепления, расстояние между болтами, отделка поверхности, регулятора крутящего момента и т.д. - все это следует контролировать, чтобы получить повторяемые результаты. Из-за большого числа параметрических вариаций, которые потребовались бы для того, чтобы учесть множество различных прокладок и материалов, требующих оценки, в настоящее время в данном приложении не содержится подробных указаний по проектированию испытательных приспособлений. Разработка универсального приспособления(й) рассматривается для будущих выпусков.
Примечание 2 - Процедуры, содержащиеся в данном приложении, предполагают, что оцениваемая прокладка или материал обеспечивают номинальную степень защиты. Если экранирование, обеспечиваемое испытуемым материалом и/или прокладкой, составляет менее 10 дБ, то фактор качества Q испытательного приспособления не зависит от Q камеры. В таких случаях TFVF (см. G.3.8) неприменим, и тогда следует применять методы, описанные в [8].
Примечание 3 - Эта процедура предполагает, что отверстие приспособления очень большое (порядка одной полной стороны испытательного приспособления). Если это так, то при использовании испытательной установки, показанной на рисунке G.1, и при снятой апертуре мощность, получаемая эталонной антенной Rx, должна быть аналогична мощности, получаемой антенной Rx. Если это не так, то эту процедуру не следует использовать, а следует применять методы, описанные в [8].
G.2 Измерение эффективности экранирования
Измерение эффективности экранирования (SE) основано на сравнении мощности электромагнитного излучения вне испытуемого оборудования (ИО) с электромагнитной мощностью, которая распространяется в ИО. Эффективность экранирования определяется как:
 (G.1)
(G.1)где PEUT - мощность, подключенная к испытуемому оборудованию;
PRef - мощность, подключенная к эталонной антенне.
G.3 Описание испытательной установки
G.3.1 Общие положения
Для испытания прокладок и материалов обычно требуется сконструировать испытательное приспособление, к которому крепится оцениваемый элемент. В некоторых случаях целые корпуса могут быть изготовлены из материала, подлежащего оценке. В таких случаях следует использовать процедуры, приведенные в приложении H. Метод измерения SE в реверберационной камере использует подход вложенной камеры. В испытательном приспособлении установлена приемная антенна и механический регулятор/мешалка для обнаружения любой радиочастотной энергии, которая "просачивается" в приспособление. Механический регулятор/мешалка должен быть как можно большего размера и при этом сохранять расстояние разделения  от приемной антенны. Пример "вложенной камеры" показан на рисунке G.1. Для испытательных элементов, таких как материалы и окна, в крышке могут быть вырезаны отверстия.
от приемной антенны. Пример "вложенной камеры" показан на рисунке G.1. Для испытательных элементов, таких как материалы и окна, в крышке могут быть вырезаны отверстия.
Примечание - Процедуры, описанные в настоящем приложении, не позволяют отделить защиту с помощью отверстия от защиты, обеспечиваемой прокладкой или материалом, используемым в сочетании с этим отверстием. Если такое разделение желательно, то следует использовать процедуры, описанные в [8].
G.3.2 Испытательная установка для материалов
Для испытания материалов требуется испытательное приспособление. Пример приспособления показан на рисунке G.2. Оно должно иметь поверхности, совместимые с применяемой прокладкой, изготовленной из испытуемого материала.
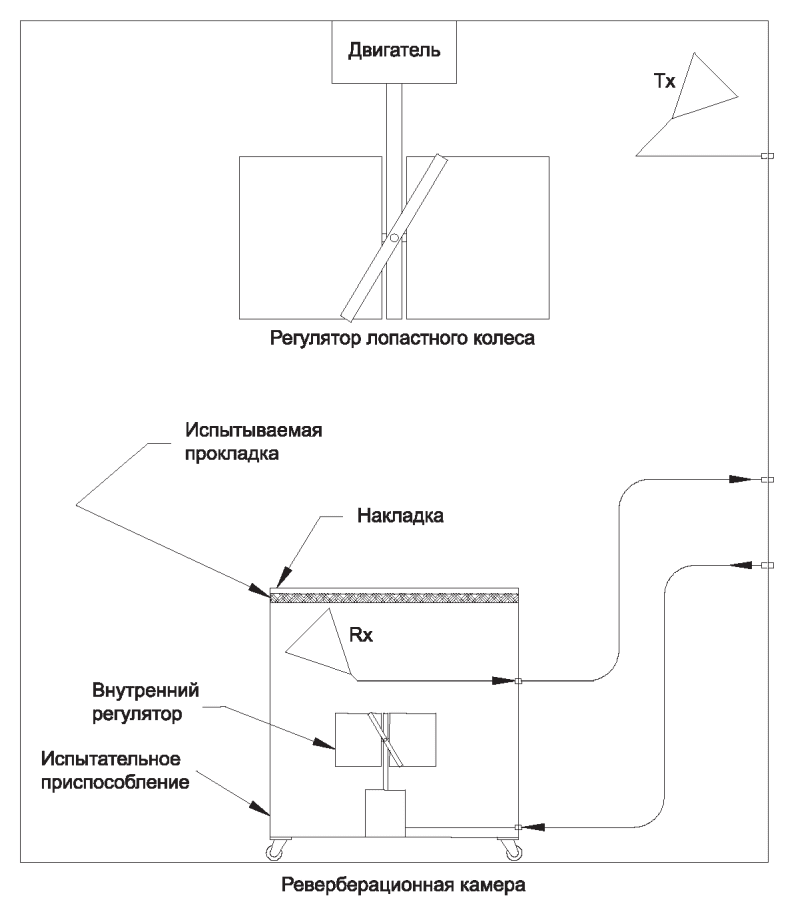
приспособления для испытания прокладок и/или материалов
Материал, подлежащий оценке, может быть заменен на накладку или установлен в отверстии на ней во время испытания. Размер приспособления определяет самую низкую частоту, с которой могут быть получены полезные данные. Для большинства приспособлений эту самую низкую полезную частоту можно оценить, определив частоту, на которой приспособление имеет около 60 мод. Формула для определения этой частоты приведена в G.3.8 (1). В противном случае необходимо откалибровать приспособление с использованием процедуры, приведенной в B.1.2 (приложение B).
G.3.3 Испытательная установка для прокладок
Для испытания прокладок требуется испытательное приспособление. Пример приспособления показан на рисунке G.2. Оно должно иметь поверхности, характерные для данного применения. Размер приспособления определяет самую низкую частоту, с которой могут быть получены полезные данные. Для большинства приспособлений эту самую низкую полезную частоту можно оценить, определив частоту, на которой приспособление имеет около 60 мод. Формула для определения этой частоты приведена в G.3.8 (1). В противном случае необходимо определить наименьшую полезную частоту приспособления с использованием процедуры, приведенной в B.1.2.
G.3.4 Реверберационная камера
Экранированный корпус должен быть оснащен несколькими портами доступа для облегчения подключения испытательного приспособления к измерительному оборудованию.
G.3.5 Антенны
Используемые антенны Tx должны быть эффективными на частотах, подлежащих испытанию. Наиболее важно, чтобы эффективность антенны Tx в приспособлении была как можно более высокой.
Эффективность антенны Rx должна быть одинаковой при определении характеристики испытательного устройства и при сборе данных об экранировании. Рекомендуется использовать одну и ту же антенну.
Эффективность приемной антенны не является критической. Однако, чтобы обеспечить хороший динамический диапазон, необходимо применять антенну с большим динамическим диапазоном.
G.3.6 Испытательная установка
Основное испытательное оборудование и компоненты, необходимые для автоматического измерения эффективности экранирования, показаны на рисунке G.1. Обратите внимание, что для получения желаемого динамического диапазона также могут потребоваться предусилители, усилители и другие компоненты.
G.3.7 Соединительные устройства
Соединительные устройства обычно представляют собой коаксиальные линии сопротивлением 50 Ом, эффективность экранирования которых по меньшей мере на 10 дБ выше желаемой эффективности экранирования.
Перед началом испытания все соединительные устройства должны быть проверены на ослабление. Это включает в себя соединительные устройства для ИО антенны Rx, антенны Tx и эталонной антенны.
Перед выполнением любых испытаний испытательное приспособление должно быть откалибровано. Цель состоит в том, чтобы определить фактор качества Q испытательного приспособления таким образом, чтобы можно было учесть любое влияние резонатора Q на принятый сигнал. Процедура проверки заключается в следующем:
(1) Определите наименьшую полезную частоту для испытательного приспособления, рассчитав частоту, при которой приспособление имеет по меньшей мере 60 возможных мод (N = 60), используя следующую формулу (действительную для прямоугольных корпусов) [4]:

где a, b, d - размеры приспособления, м;
c - скорость распространения волны в приспособлении, м/с;
f - частота, Гц.
Примечание 1 - Наименьший размер отверстия приспособления должен составлять не менее  на самой низкой используемой частоте, чтобы свести к минимуму эффекты отсечки. Уравнение (G.2) может быть обобщено для испытательных приспособлений произвольной (непрямоугольной) формы, включая изогнутые границы [8].
на самой низкой используемой частоте, чтобы свести к минимуму эффекты отсечки. Уравнение (G.2) может быть обобщено для испытательных приспособлений произвольной (непрямоугольной) формы, включая изогнутые границы [8].
(2) Сконфигурируйте испытательное приспособление для проверки, установив передающую антенну внутри испытательного приспособления, как показано на рисунке G.3. Механический регулятор должен быть как можно большего размера и при этом сохранять расстояние  от антенны Rx. Желательно направить антенну Rx в угол. Допустимо направлять антенну Rx на регулятор/мешалку. Точки ввода в испытательное приспособление для устройства подключения антенны Rx и питания регулятора/мешалки должны быть хорошо экранированы. Экранирование точек подачи должно быть по крайней мере на 5 дБ выше желаемой эффективности экранирования.
от антенны Rx. Желательно направить антенну Rx в угол. Допустимо направлять антенну Rx на регулятор/мешалку. Точки ввода в испытательное приспособление для устройства подключения антенны Rx и питания регулятора/мешалки должны быть хорошо экранированы. Экранирование точек подачи должно быть по крайней мере на 5 дБ выше желаемой эффективности экранирования.
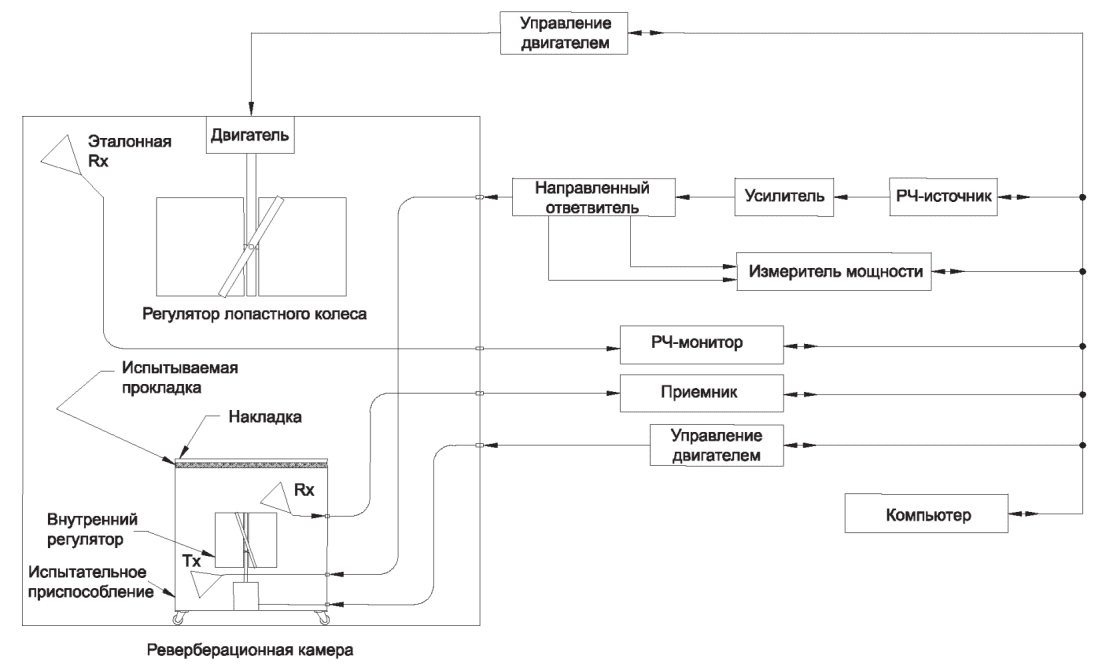
сконфигурированное для проверки
(3) Сконфигурируйте испытательное приспособление так, как оно будет использоваться для испытания, установив прокладку и/или материал, подлежащий испытанию. Для каждой испытательной частоты введите известную мощность на антенну Tx внутри испытательного приспособления (т.е. проверка должна проводиться относительно клемм антенн Tx и Rx). В положении регулятора, которое приводит к максимальному принятому сигналу, запишите максимальную мощность, полученную антенной Rx испытательного приспособления за один оборот регулятора внутри испытательного приспособления, и запишите прямую и отраженную мощность, присутствующую на антенне Tx испытательного приспособления.
Примечание 2 - Испытание SE хорошо подходит для методов режима перемешивания из-за обычно быстрого времени отклика используемых приемников. Если используется перемешивание, убедитесь, что вопросы, указанные в приложении C, надлежащим образом решены. Если используется режим регулировки, то используйте по крайней мере минимальное количество шагов, описанных в приложении B, с fs, установленным на частоту, при которой испытательное приспособление имеет 60 возможных мод.
(4) Определите коэффициент проверки испытательного приспособления (TFVF) (в линейном выражении), взяв соотношение между передаваемой мощностью и максимальной принятой мощностью:
где PMaxRec - максимальная мощность, Вт, принимаемая на антенных клеммах приемной антенной испытательного приспособления за один оборот регулятора, установленного внутри испытательного приспособления;
PInput - полезная мощность, Вт, подаваемая на антенные клеммы передающей антенны внутри испытательного приспособления. Входная мощность вычисляется на основе измерений прямой и отраженной мощности на шаге (3) как PInput = PForward - PReflected.
(5) Если позволяет время, повторите эту процедуру еще два раза, используя разные места расположения антенн Tx и Rx в испытательном приспособлении. Для каждой частоты используйте среднее значение максимальной принятой мощности для определения вносимых потерь (т.е. когда для калибровки испытательного приспособления используются три комбинации антенн Tx и Rx, используйте среднее значение трех максимальных показаний для вычисления TFVF для каждой частоты). Мощность передачи должна быть одинаковой для каждого запуска. Если одна и та же мощность передачи не используется для каждого запуска, вычислите TFVF для каждого запуска, а затем вычислите среднее значение TFVF для приспособления.
G.3.9 Определение динамического диапазона измерений
Перед выполнением любого испытания динамический диапазон измерения должен быть определен следующим образом:
(1) Снимите материал или защитную пластину с испытательного приспособления и убедитесь, что приемная антенна находится на месте.
Примечание 1 - Это должно приравниваться, по существу, к удалению одной стороны приспособления.
(2) Снимите передающую антенну и устройства для соединения приемопередатчиков с приспособлениями и присоедините экранированный конец к порту соединения приемо-передающей антенны испытательного приспособления. Этот экранированный конец должен иметь экранирование по крайней мере на 10 дБ больше, чем экранирование, подлежащее измерению.
(3) Для каждой испытательной частоты передайте известную мощность в передающую антенну камеры (опять же, проверка должна проводиться относительно выводов антенны) и запишите максимальную мощность, полученную приемной антенной испытательного приспособления за один оборот регулятора камеры.
Примечание 2 - Испытание SE хорошо подходит для методов перемешивания мод из-за обычно быстрого времени отклика используемых приемников. Если используется перемешивание, то убедитесь, что вопросы, указанные в приложении C, надлежащим образом решены. Если используется режим регулировки, то используйте по крайней мере то же количество шагов, что и для калибровки камеры.
(4) Замените антенну Rx испытательного приспособления на хорошо экранированную нагрузку.
(5) Повторите шаг (3).
Примечание 3 - Следует использовать одинаковую входную мощность камеры или полученную мощность от каждой точки данных нормализовать к входной мощности камеры.
(6) Замените антенну Rx испытательного приспособления.
(7) Определите динамический диапазон измерительной установки (в дБ), взяв соотношение между показаниями, записанными на этапах (3) и (5). Внесите поправку на вносимые потери испытательного приспособления, как показано в формуле (G.4), убедившись, что это значение превышает требуемое экранирование по крайней мере на 5 дБ.

где PRx Antenna - максимальная мощность, получаемая антенной Rx испытательного приспособления;
PRx Termination - максимальная мощность, получаемая антенными клеммами Rx испытательного приспособления при замене антенны на нагрузку;
TFVF - коэффициент проверки испытательного приспособления, полученный из G.3.8 (4).
G.4 Процедура измерения
G.4.1 Общие положения
Проведите испытание, используя процедуры режима регулятора или режима перемешивания. Для работы в режиме регулятора регулятор камеры должен использовать по крайней мере то же количество шагов, что и при проверке камеры. Устройство регулятора испытательного приспособления должно использовать то же количество шагов, что и в G.3.8 (3). При использовании процедур в режиме регулятора оба регулятора камеры следует поворачивать таким образом, чтобы в результате регулятор испытательного приспособления совершал один полный оборот за каждый шаг регулятора камеры. При использовании процедур с режимом перемешивания максимальная скорость вращения мешалки должна обеспечивать, чтобы ИО и связанное с ним измерительное оборудование подвергались воздействию по меньшей мере того же количества выборок, которое было бы получено при использовании процедуры режима регулятора. Убедитесь, что для любой процедуры измерительному оборудованию разрешено измерять выборку уровня поля в течение соответствующего времени выдержки. Это особенно важно при работе в режиме перемешивания.
Примечание - Часто бывает удобно использовать комбинацию регулятора и перемешивания. Регулятор камеры поворачивается на один полный оборот, с тем же количеством шагов, что и при проверке камеры, в то время как мешалка для испытательного приспособления вращается непрерывно. Для каждого положения (шага) регулятора камеры регулятор испытательного приспособления совершает один полный оборот. Частота вращения регулятора испытательного приспособления такая же, как в G.3.8 (3). Это гарантирует, что частота дискретизации измерительного оборудования такова, что при каждом повороте регулятора испытательного приспособления получается необходимое количество выборок. Указания по максимальной скорости перемешивания см. в приложении C.
Измеряемый параметр - это максимальная принимаемая мощность. Для измерений, основанных на максимальной принятой мощности, динамический диапазон измерительной системы должен быть по крайней мере на 5 дБ больше, чем требуемое экранирование.
G.4.2 Измерение испытуемого оборудования
Процедура заключается в следующем.
(1) Подключите радиочастотный источник к антенне внутри камеры (при необходимости через усилитель).
(2) Подключите измерительное оборудование к антенне Rx испытательного приспособления (при необходимости через предусилитель).
(3) Подключите эталонную антенну камеры к оборудованию контроля камеры (при необходимости через аттенюатор).
(4) Установите прокладку и/или материал, подлежащий испытанию, на испытательное приспособление.
(6) Подайте первую испытательную частоту на антенну внутри камеры при фиксированной входной мощности.
(7) Запишите максимальное значение показаний оборудования для контроля камеры и оборудования для контроля ИО за один полный цикл регулятора(ов)/мешалки (мешалок).
(8) Повторите шаг (7) для всех испытательных частот.
(9) Установите известный защитный материал (например, алюминиевую или медную фольгу или ленту) поверх мест предполагаемой утечки. Не применяйте дополнительную защиту к точкам подачи или любой другой области испытательного приспособления, которая не является частью оценки.
Примечание - Как для сбора данных, так и для проверки на герметичность следует использовать одинаковую входную мощность, подаваемую на антенну внутри камеры. Если используется другая входная мощность, то перед вычислением SE все данные должны быть нормализованы к входной мощности, подаваемой на антенну внутри камеры.
(11) Эффективность экранирования SE, дБ, затем может быть рассчитана с использованием следующего уравнения, с учетом ослабления линий связи как для ИО, так и для эталонной антенны:
где PEUT - максимальная мощность, принимаемая антенной Rx испытательного приспособления (с поправкой на ослабления линий связи);
PRef - максимальная мощность, принимаемая эталонной антенной камеры (с поправкой на ослабления линий связи);
TFVF - коэффициент проверки испытательного приспособления, полученный из G.3.8 (4), уравнение (G.3).
(12) Испытание на утечку на этапе (10) гарантирует, что измеренная утечка произошла через область испытательного приспособления, которая была частью оценки и не является результатом модификации испытательного приспособления, например точки подачи питания регулятора и линии приема. Определите SE этой конфигурации, используя уравнение (G.5), подставив полученные мощности из шага (10). Если SE, полученный на этапе (10), не превышает по меньшей мере на 5 дБ SE, полученный на немодифицированном испытательном приспособлении, то считается, что SE больше или равно SE неизмененного испытательного приспособления. Если требуется более высокий SE, то необходимо провести дополнительные исследования относительно точек входа в измерительную систему.
G.4.3 Альтернативный метод измерения ИО
Если два комплекта измерительного оборудования недоступны, то измерительное оборудование может быть подключено к ИО и эталонной антенне по очереди для каждого измерения.
Если используются два набора линий связи, то эффективность экранирования должна быть рассчитана с учетом ослабления линий связи как для ИО, так и для эталонной антенны.
Если используется только один набор линий связи, то ослабление связи можно игнорировать. В таком случае экранирование - это разница между двумя полученными мощностями.
G.5 Поперечное сечение передачи
G.5.1 Общие сведения
Другим способом оценки эффективности экранирования является определение поперечного сечения передачи  . Поперечное сечение передачи (в м2)
. Поперечное сечение передачи (в м2)
 (G.6)
(G.6)где PTrans - мощность, передаваемая через отверстие, Вт;
В общем случае, если падающее поле представляет собой плоскую волну, то  будет зависеть от угла падения и поляризации волны. Когда
будет зависеть от угла падения и поляризации волны. Когда  измеряется с помощью реверберационных камер, результирующая
измеряется с помощью реверберационных камер, результирующая  представляет собой изотропное среднее значение по всем углам падения и всем поляризациям. Это связано с изотропной природой окружающей среды в реверберационной камере.
представляет собой изотропное среднее значение по всем углам падения и всем поляризациям. Это связано с изотропной природой окружающей среды в реверберационной камере.
Для получения поперечного сечения передачи данные, собранные в G.3.8, должны быть изменены. Путем записи средней принятой мощности в G.3.8 (3) вместо максимальной принятой мощности и вычисления обратной величины TFVF на основе средней мощности поперечное сечение передачи (в м2) может быть рассчитано по следующей формуле:
 (G.7)
(G.7)где  - обратная величина TFVF, полученная из G.3.8 (4) и рассчитанная с использованием средней принятой мощности вместо максимальной принятой мощности;
- обратная величина TFVF, полученная из G.3.8 (4) и рассчитанная с использованием средней принятой мощности вместо максимальной принятой мощности;
PTest Fixture - средняя мощность, принимаемая антенной внутри испытательного приспособления;
PRef - средняя мощность, принимаемая эталонной антенной камеры;
G.5.2 Оценка эффективности экранирования ограждения
Среднюю эффективность экранирования электрически большого корпуса можно оценить следующим образом:
 (G.8)
(G.8)где V и Q - объем, м3, и фактор качества корпуса (испытательного приспособления);
Примечание - Символы < > обозначают среднее пространственное значение, полученное по всем внутренним точкам внутри ограждения. Это среднее значение по схеме стоячей волны поля внутри полости.
G.6 Контроль испытательной установки
Перед любыми измерениями динамический диапазон испытательной установки должен быть проверен с использованием тех же соединительных устройств, что и для ИО. Динамический диапазон должен быть по крайней мере на 10 дБ больше, чем требуемое экранирование.
Перед любыми измерениями экранирования материала должен быть определен TFVF. Рекомендуется собирать TFVF с использованием реальных испытательных выборок.
Определение вносимых потерь испытательного приспособления (G.3.8) может быть опущено, если Q испытательного приспособления аналогично Q предполагаемого применения испытуемого материала или прокладки. Кроме того, если испытание выполняется на нескольких элементах для определения относительного SE, проверка испытательного приспособления также может быть опущена.
Данные могут собираться на частотах ниже LUF испытательного приспособления. К таким данным следует относиться с осторожностью, поскольку погрешности измерений быстро возрастают ниже LUF.
Примечание 1 - Процедура сбора данных является одной из возможных последовательностей сбора желаемых данных. В зависимости от типа приемника, радиочастотного источника и используемого управления движением возможно множество вариантов, которые приведут к сбору требуемых данных. Например, можно использовать анализатор спектра в режиме максимального удержания для приемника и настроить его на запись принятого сигнала в широком диапазоне частот, одновременно увеличивая входную частоту камеры в том же диапазоне. Если время выдержки на каждой частоте таково, что устройство регулятора приспособления совершает один оборот за каждый из шагов, необходимых для поворота устройства регулятора камеры на один оборот, то на каждой частоте будет собрано необходимое количество выборок.
Примечание 2 - Если экранирующий материал не является взаимозаменяемым (например, намагниченный феррит или полупроводник), ту же информацию можно получить путем передачи в испытательное приспособление и измерения количества радиочастотной энергии, которая вытекает из испытательного приспособления.
Примечание 3 - Приблизительное количество энергии, поглощаемой испытуемым материалом, можно определить, сравнив TFVF с материалом на месте с креплением TFVF с прочной алюминиевой пластиной вместо испытуемого материала.
IEC 61726, Cable assemblies, cables, connectors and passive microwave components - Screening attenuation measurement by the reverberation chamber method (Кабельные узлы, кабели, соединители и пассивные микроволновые компоненты. Измерение затухания экранирования методом реверберационной камеры) | |
IEC 60169-1-3, Radio-frequency connectors - Part 1: General requirements and measuring methods - Section Three - Electrical tests and measuring procedures: Screening effectiveness (Радиочастотные соединители. Часть 1. Общие требования и методы измерений. Раздел 3. Электрические испытания и процедуры измерений: эффективность экранирования) | |
IEC 61000-5-7, Electromagnetic compatibility (EMC) - Part 5-7: Installation and mitigation guidelines - Degrees of protection provided by enclosures against electromagnetic disturbances (EM code) (Электромагнитная совместимость (EMC). Часть 5-7. Рекомендации по монтажу и защите от электромагнитных помех. Степени защиты, обеспечиваемые корпусами от электромагнитных помех (EM-код)) | |
HATFIELD M.O. Shielding effectiveness measurements using mode-stirred chambers: A comparison of two approaches, IEEE Trans. EMC, Aug. 1988, vol. 30 no. 3, pp. 229 - 238 | |
FREYER G.J. and HATFIELD M.O. Comparison of gasket transfer impedance and shielding effectiveness measurements - Part I, Proc. IEEE Int. Symp. EMC, Anaheim, CA, Aug. 1992, pp. 139 - 141 | |
HATFIELD M.O. and FREYER G.J. Comparison of gasket transfer impedance and shielding effectiveness measurements - Part II, Proc. IEEE Int. Symp. EMC, Anaheim, CA, Aug. 1992, pp. 142 - 148 | |
HE Y., MARVIN A.C. and FLINTOFT I.D. A study of the field statistics in nested frequency-stirred reverberation chambers, 29th URSI Gen. Assembly, Chicago, IL, Aug. 2008 | |
HOLLOWAY C.L., HILL D., LADBURY J., KOEPKE G. and GARZIA R. Shielding effectiveness measurements of materials in nested reverberation chambers, IEEE Trans. EMC, vol. 45 no. 1, 2003 | |
[9] | ARNAUT L.R. Operation of electromagnetic reverberation chambers with wave diffractors at relatively low frequencies, IEEE Trans. EMC, Nov. 2001, vol. 43 no. 4, pp. 637 - 653 |
MARTIN T.,  M. and M. and | |
QUINE J.P. Distortion of radiation pattern for leakage power transmitted through attenuation cover panels and shielding gasket - need for reverberation chamber measurement of total leakage power, Proc. IEEE Int. Symp. EMC, Chicago, Aug. 1994, pp. 285 - 290 | |
MIL-STD-285, Attenuation measurements for enclosures, electromagnetic shielding, for electronic test purposes (Измерения ослабления для корпусов, электромагнитного экранирования, для целей электронных испытаний) |
(справочное)
H.1 Обзор
ИС МЕГАНОРМ: примечание. В официальном тексте документа, видимо, допущена опечатка: пункт [12] в разделе H.6 отсутствует. |
Как и при испытании на излучаемые радиопомехи, существует множество методов испытания для оценки эффективности экранирования прокладок, оконных материалов и других конфигураций систем, предназначенных для обеспечения экранирования [1] <10>, [2], [3]. Как правило, измерение эффективности экранирования (SE) сравнивает электромагнитную среду (EM) внутри корпуса с применяемым подходом к проектированию экранирования и без него. Методы испытания эффективности экранирования (SE) описаны во многих источниках ссылок, таких как MIL-STD-285 [12]. К сожалению, многие измерения эффективности экранирования (SE) отличаются недостаточной повторяемостью и сопоставимостью между объектами. Некоторые из этих расхождений могут быть связаны с методикой испытаний, в то время как другие вызваны самим испытуемым изделием. Многие факторы, такие как состояние сопрягаемых поверхностей и затяжка крепежных элементов, могут заметно повлиять на повторяемость измерений эффективности экранирования (SE).
--------------------------------
<10> Цифры в квадратных скобках относятся к разделу H.6 "Справочные документы" в конце настоящего приложения.
Для многих конструкций экранирования (например, прокладок, окон и т.д.) при испытании реверберации используется подход "вложенной камеры" (т.е. реверберационная камера внутри реверберационной камеры). В испытательном корпусе установлена приемная антенна и регулятор с лопастным колесом для обнаружения любой радиочастотной энергии, которая "просачивается" в корпус. Читателям, которые не знакомы с использованием реверберационных камер для измерений эффективности экранирования (SE), следует ознакомиться с [3], [4], [5] или [6].
Многие факторы, связанные с испытательной установкой, должны тщательно контролироваться для достижения повторяемости при испытании эффективности экранирования (SE). Если предположить, что эти факторы можно контролировать, однородность электромагнитной обстановки в реверберационной камере обеспечивает всестороннее испытание эффективности экранирования (SE) с отличной повторяемостью от объекта к объекту.
H.2 Измерение эффективности экранирования испытуемого оборудования
Измерение эффективности экранирования основано на сравнении мощности электромагнитного поля вне ИО с мощностью электромагнитного поля, индуцированного в ИО. Эффективность экранирования SE, дБ, определяется как
 (H.1)
(H.1)где PEUT - мощность, подведенная на испытуемое оборудование;
PRef - мощность, подведенная на эталонную антенну.
H.3 Описание испытательной установки
H.3.1 Общие положения
Для испытуемых корпусов не требуется изготавливать испытательное приспособление, к которому крепится оцениваемый элемент. Испытуемый элемент оснащен приборами. При испытании эффективности экранирования (SE) реверберационной камеры используется подход "вложенной камеры" (например, реверберационная камера внутри другой реверберационной камеры). В корпусе установлена приемная антенна и регулятор/мешалка с лопастным колесом для обнаружения любой радиочастотной энергии, которая "просачивается" в корпус. Корпус должен находиться на расстоянии не менее  от стенок камеры. Корпусы, предназначенные для работы на столе, должны располагаться на расстоянии
от стенок камеры. Корпусы, предназначенные для работы на столе, должны располагаться на расстоянии  от пола камеры. Напольные корпусы должны поддерживаться на высоте 10 см над полом с помощью диэлектрической опоры.
от пола камеры. Напольные корпусы должны поддерживаться на высоте 10 см над полом с помощью диэлектрической опоры.
H.3.2 Расположение оборудования при испытании корпусов
Размер корпуса определяет самую низкую частоту, с которой могут быть получены полезные данные. Для большинства корпусов эту самую низкую полезную частоту можно оценить, определив частоту, на которой корпус имеет около 60 мод. Формула для определения этой частоты приведена в H.3.7 (1), уравнение (H.2). При желании корпус можно откалибровать, используя процедуру, приведенную в B.1.2. Корпус должен быть модифицирован путем установки приемной антенны и механического регулятора в собранном виде.
H.3.3 Реверберационная камера
Экранированный корпус должен быть оснащен несколькими портами доступа для облегчения подключения корпуса к измерительному оборудованию.
H.3.4 Антенны
Используемые антенны Tx должны быть эффективными на частотах, подлежащих испытанию. Наиболее важно, чтобы эффективность антенн Tx в корпусе была как можно более высокой.
Эффективность антенны Rx должна быть одинаковой для характеристики испытательного корпуса и для сбора данных об экранировании. Рекомендуется использовать одну и ту же антенну. Эффективность антенны Rx не является критической. Однако, чтобы обеспечить хороший динамический диапазон, необходимо применять антенну с большим динамическим диапазоном.
H.3.5 Испытательная установка
Основное испытательное оборудование и компоненты, необходимые для автоматического измерения эффективности экранирования, показаны на рисунках H.1 и H.2. Обратите внимание, что для получения желаемого динамического диапазона также могут потребоваться предусилители, усилители и другие компоненты.
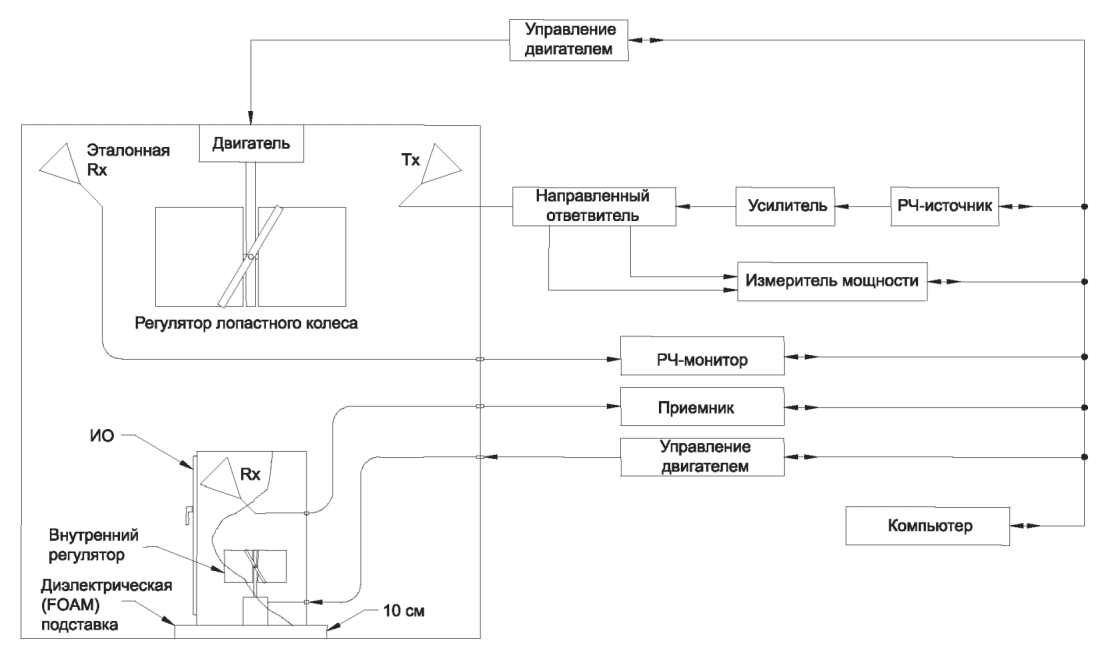
для испытания напольного корпуса
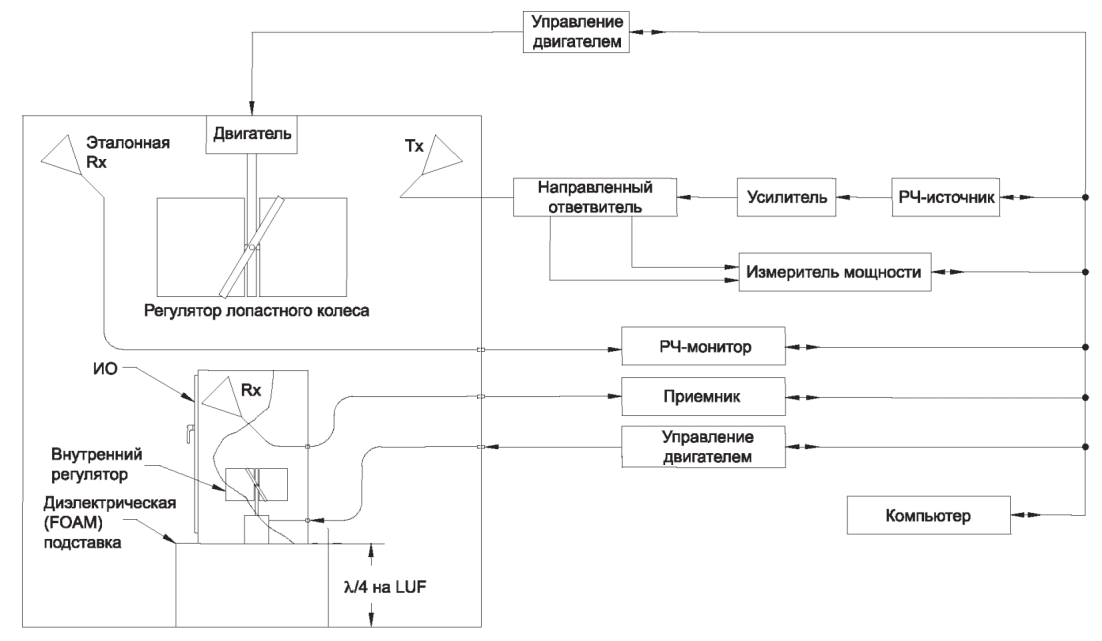
для стендовых испытаний корпуса
H.3.6 Соединительные устройства
Соединительные устройства обычно представляют собой коаксиальные линии 50 Ом, эффективность экранирования которых по меньшей мере на 10 дБ выше желаемой.
Перед началом испытания все соединительные устройства должны быть проверены на ослабление. Это включает в себя соединительные устройства ИО для антенны Rx, одной или нескольких антенн Tx и эталонной антенны.
H.3.7 Подготовка корпуса
В отличие от испытаний SE прокладок и материалов, где должны учитываться потери при испытании крепежных элементов, испытания корпусов не требуют проверки корпуса. Это связано с тем, что потери, связанные с корпусом, являются частью экранирования, которое, как можно ожидать, обеспечит корпус. Еще предстоит определить диапазон частот, в котором могут быть получены точные данные. Следовательно, должна быть определена самая низкая полезная частота (LUF), т.е. самая низкая частота, при которой можно ожидать, что испытуемый корпус выдаст достаточно точные данные. Подготовьте корпус к испытаниям следующим образом:
(1) Определите наименьшую полезную частоту для корпуса, рассчитав частоту, на которой он имеет по меньшей мере 60 возможных мод (N = 60), используя следующую формулу (действительна для прямоугольных корпусов [4]; для непрямоугольных корпусов см. примечание 1 в G.3.8):

где a, b, d - размеры корпуса (L, W, H), м;
c - скорость распространения волны в корпусе, м/с;
f - частота, Гц.
(2) Настройте корпус для испытания, установив внутри корпуса антенну Rx и механический регулятор. Механический регулятор должен быть как можно большего размера и при этом сохранять расстояние разделения  от приемной антенны. Желательно направить антенну Rx в угол. Допустимо направлять антенну Rx на регулятор/мешалку. Точки ввода в корпус устройства для подключения антенны Rx и питания регулятора/мешалки должны быть хорошо экранированы. Экранирование точек подачи должно быть по крайней мере на 5 дБ выше желаемой эффективности экранирования.
от приемной антенны. Желательно направить антенну Rx в угол. Допустимо направлять антенну Rx на регулятор/мешалку. Точки ввода в корпус устройства для подключения антенны Rx и питания регулятора/мешалки должны быть хорошо экранированы. Экранирование точек подачи должно быть по крайней мере на 5 дБ выше желаемой эффективности экранирования.
(3) Испытание SE хорошо подходит для методов перемешивания мод из-за обычно быстрого времени отклика используемых приемников. Если используется перемешивание, то убедитесь, что вопросы, указанные в приложении C, надлежащим образом решены. Если используется режим регулировки, используйте по крайней мере минимальное количество шагов, описанных в приложении B, с fs, установленным на частоту, на которой корпус имеет 60 возможных мод.
H.3.8 Определение динамического диапазона измерений
Перед выполнением любого испытания динамический диапазон измерительной системы должен быть определен следующим образом:
(1) Снимите все люки, двери и т.д., необходимые для того, чтобы открыть внутреннюю часть корпуса, подлежащего испытанию.
Примечание 1 - Если в корпусе имеется большая дверь или другое отверстие, которое при открытии полностью обнажает внутреннюю часть полости, то снятие панелей доступа и т.д. не требуется.
(2) Для каждой испытательной частоты передайте известную мощность в антенну Tx камеры (кроме того, проверка должна проводиться относительно антенных выводов) и запишите максимальную мощность, полученную антенной Rx испытательного корпуса за один оборот регулятора камеры.
Примечание 2 - Испытание SE хорошо подходит для методов режима перемешивания из-за обычно быстрого времени отклика используемых приемников. Если используется перемешивание, убедитесь, что вопросы, указанные в приложении C, надлежащим образом решены. Если используется режим регулировки, то используйте не меньшее количество шагов, чем было использовано для калибровки камеры.
(4) Повторите шаг (2).
Примечание 3 - Следует использовать одинаковую входную мощность камеры или полученную мощность от каждой точки данных нормализовать к входной мощности камеры.
(6) Определите динамический диапазон измерительной установки, взяв соотношение между показаниями, записанными на этапах (3) и (5), убедившись, что его значение превышает требуемое экранирование по крайней мере на 5 дБ, используя следующее уравнение:
 (H.3)
(H.3)где PRx Antenna - мощность, принимаемая антенной камеры Rx;
PRx Termination - мощность, получаемая антенными клеммами Rx испытательного корпуса при замене антенны на нагрузку.
H.4 Процедура измерения
H.4.1 Общие положения
Проведите испытание, используя процедуры режима регулятора или режима перемешивания. Для работы с настройкой режима регулятор камеры должен использовать по крайней мере то же количество шагов, что и при проверке камеры. Встроенный регулятор должен использовать то же количество шагов, что и в H.3.8 (3).
При использовании процедур режима регулятора оба регулятора следует поворачивать таким образом, чтобы в результате регулятор корпуса совершал один полный оборот за каждый шаг регулятора камеры. При использовании процедур с режимом перемешивания максимальная скорость вращения мешалки должна обеспечивать, чтобы ИО и связанное с ним измерительное оборудование подвергались воздействию по меньшей мере того же количества выборок, которое было бы получено при использовании метода для режима регулировки. Убедитесь, что для любой процедуры измерительному оборудованию разрешено измерять выборку уровня поля в течение соответствующего времени выдержки.
Это особенно важно при работе в режиме перемешивания.
Примечание - Часто бывает удобно использовать комбинацию регулятора и перемешивания. Регулятор камеры поворачивается на один полный оборот, с тем же количеством шагов, что и при проверке камеры, в то время как регулятор/мешалка в корпусе вращается непрерывно. Для каждого положения (шага) регулятора/мешалки камеры регулятор/мешалка в корпусе совершает один полный оборот. Частота вращения регулятора/мешалки испытательного корпуса такая же, как в H.3.8 (3). Это гарантирует, что частота дискретизации измерительного оборудования такова, что при каждом повороте регулятора/мешалки испытательного корпуса получается необходимое количество выборок. Указания по максимальной скорости перемешивания см. в приложении C.
Измеряемый параметр - это максимальная принимаемая мощность. Для измерений, основанных на максимальной принятой мощности, динамический диапазон измерительной системы должен быть по крайней мере на 5 дБ больше, чем желаемая эффективность экранирования.
H.4.2 Измерение испытуемого оборудования
Процедура заключается в следующем:
(1) Подключите радиочастотный источник к антенне внутри камеры (при необходимости через усилитель).
(2) Подключите измерительное оборудование к антенне Rx испытательного корпуса (при необходимости через предусилитель).
(3) Подключите эталонную антенну камеры к оборудованию контроля камеры (при необходимости через аттенюатор).
(4) Настройте корпус для испытания.
(6) Введите первую испытательную частоту в камеру при фиксированной входной мощности.
(7) Запишите максимальное значение показаний оборудования для контроля камеры и оборудования для контроля ИО за один полный цикл регулятора(ов)/мешалки (мешалок).
(8) Повторите шаг (7) для всех испытательных частот.
(9) Установите известный защитный материал (алюминиевую или медную фольгу или ленту) поверх мест предполагаемой утечки. Не применяйте дополнительную защиту к точкам подачи или любой другой области корпуса, которая не является частью оценки.
Примечание - Как для сбора данных, так и для проверки на герметичность следует использовать одинаковую входную мощность камеры. Если используется другая входная мощность, то все данные должны быть нормализованы к входной мощности камеры перед вычислением SE.
(11) Затем эффективность экранирования может быть рассчитана по следующей формуле, с учетом ослабления линий связи как для ИО, так и для эталонной антенны:
где PEUT - максимальная мощность, принимаемая эталонной антенной корпуса на этапе (7) (с поправкой на потери в линии связи);
PRef - мощность, принимаемая антенной Rx камеры на шаге (7) (с поправкой на потери в линии связи).
(12) Испытание на утечку на этапе (10) гарантирует, что измеренная утечка проникла через область корпуса, которая была частью оценки, и не является результатом модификации корпуса, например точки ввода для линий питания и приема регулятора. Определите SE этой конфигурации, используя уравнение (H.4), подставив полученные мощности из шага (10). Если SE, полученный на этапе (10), не превышает по меньшей мере на 5 дБ SE, полученный из неизмененного корпуса, то SE считается большим или равным SE неизмененного корпуса. Если требуется более высокий SE, то необходимо провести дополнительные исследования относительно точек входа в измерительную систему.
H.4.3 Альтернативный метод измерения испытуемого оборудования
Если два комплекта измерительного оборудования недоступны, то измерительное оборудование может быть подключено к ИО и эталонной антенне по очереди для каждого измерения.
Если используются два набора линий связи, то эффективность экранирования должна быть рассчитана с учетом ослабления линий связи как для ИО, так и для эталонной антенны.
Если используется только один набор связей, то ослабление связи можно игнорировать. В таком случае экранирование - это разница между двумя полученными мощностями.
H.5 Контроль испытательной установки
Перед любыми измерениями динамический диапазон испытательной установки должен быть проверен с использованием тех же соединительных устройств, что и для ИО. Динамический диапазон должен быть по меньшей мере на 5 дБ больше, чем желаемая эффективность экранирования.
Данные могут собираться на частотах ниже LUF корпуса. К таким данным следует относиться с осторожностью, поскольку при снижении LUF неопределенности измерений быстро возрастают.
Примечание - Процедура сбора данных - это одна из возможных последовательностей сбора желаемых данных. В зависимости от типа приемника, радиочастотного источника и используемого управления движением возможно множество вариантов, которые приведут к сбору требуемых данных. Например, можно использовать анализатор спектра в режиме максимального удержания для приемника и настроить его на запись принятого сигнала в широком диапазоне частот, одновременно увеличивая входную частоту камеры в том же диапазоне. Если время выдержки на каждой частоте таково, что корпусный регулятор совершает один оборот за каждый из шагов, необходимых для поворота камерного регулятора на один оборот, то на каждой частоте будет собрано необходимое количество образцов.
IEC 61726, Cable assemblies, cables, connectors and passive microwave components - Screening attenuation measurement by the reverberation chamber method (Кабельные узлы, кабели, соединители и пассивные микроволновые компоненты. Измерение затухания экранирования методом реверберационной камеры) | |
IEC 60169-1-3, Radio-frequency connectors - Part 1: General requirements and measuring methods - Section Three - Electrical tests and measuring procedures: Screening effectiveness (Радиочастотные соединители. Часть 1. Общие требования и методы измерений. Раздел 3. Электрические испытания и процедуры измерений: эффективность экранирования) | |
IEC 61000-5-7, Electromagnetic compatibility (EMC) - Part 5-7: Installation and mitigation guidelines - Degrees of protection provided by enclosures against electromagnetic disturbances (EM code) (Электромагнитная совместимость (EMC). Часть 5-7. Рекомендации по монтажу и защите от электромагнитных помех. Степени защиты, обеспечиваемые корпусами от электромагнитных помех (EM-код)) | |
HATFIELD M.O. Shielding effectiveness measurements using mode-stirred chambers: a comparison of two approaches, IEEE Trans. EMC, Aug. 1988, vol. 30 no. 3, pp. 229 - 238 | |
FREYER G.J. and HATFIELD M.O. Comparison of gasket transfer impedance and shielding effectiveness measurements - Part I, Proc. IEEE Int. Symp. EMC, Anaheim, CA, Aug. 1992, pp. 139 - 141 | |
HE Y., MARVIN A.C. and FLINTOFT I.D. A study of the field statistics in nested frequency-stirred reverberation chambers, Proc. 29th URSI General Assembly, Chicago, IL, Aug. 2008 | |
[7] | HATFIELD M.O. and FREYER G.J. Comparison of gasket transfer impedance and shielding effectiveness measurements - Part II, Proc. IEEE Int. Symp. EMC, Anaheim, CA, Aug. 1992, pp. 142 - 148 |
(справочное)
I.1 Эффективность антенны
Эффективность антенны определяется как отношение общей мощности, излучаемой антенной, к полезной мощности, принимаемой антенной от подключенного передатчика [1] <11>:
 (I.1)
(I.1)--------------------------------
<11> Цифры в квадратных скобках относятся к разделу I.3 "Справочные документы" в конце настоящего приложения.
На практике эффективность антенны определяется как отношение радиочастотной мощности, излучаемой антенной, к количеству радиочастотной мощности, подаваемой на разъем антенны:
Благодаря взаимности эффективность приема такая же, как и эффективность излучения. Эффективность антенны может быть выражена в терминах сопротивления излучению и сопротивления потерям [2].
Из приведенных выше определений мы видим, что ни одна антенна не является эффективной на 100%. Все антенны будут иметь некоторые потери. Эти потери могут быть отнесены к омическим потерям, т.е. к потерям преобразования (проводимое в излучаемое или излучаемое в проводимое), переходным потерям (коаксиальные разъемы) и т.д. Обратите внимание, что несоответствие импеданса рассматривается как отдельная характеристика антенны и не является частью эффективности антенны.
Хотя эффективность является реальной характеристикой антенны, эффективность антенны обычно не измеряется во время проверки характеристик антенны. На самом деле эффективность антенны нелегко измерить, хотя ее можно вычислить на основе численного моделирования распределения тока по антенне. Большинство хороших антенн эффективны. Типичный коммерческий рупор с двумя ребрами, например, преобразует порядка 95% радиочастотной энергии, подаваемой на его разъем, в излучаемое поле, тогда как логопериодическая антенна, с другой стороны, преобразует порядка 75% радиочастотной энергии, подаваемой на ее терминалы, в излучаемое поле [3].
При выполнении измерений в реверберационной камере необходимо учитывать эффективность антенны, чтобы сделать точные оценки характеристик камеры, таких как фактор качества камеры Q и постоянная времени камеры  . Значения 95% и 75%, используемые в данной спецификации, основаны на опыте Национального института стандартов и технологий (NIST), Отдела электромагнитных полей, Боулдер, Колорадо, США. Поскольку фактические значения эффективности не поставляются с данными производителей, необходимо сделать приближения, чтобы повысить точность характеристики камеры [3], [4]. Заявленная эффективность основана на измерениях, проведенных NIST с использованием нескольких рупорных и логопериодических антенн, все из которых последовательно демонстрировали эффективность, близкую к заявленным значениям.
. Значения 95% и 75%, используемые в данной спецификации, основаны на опыте Национального института стандартов и технологий (NIST), Отдела электромагнитных полей, Боулдер, Колорадо, США. Поскольку фактические значения эффективности не поставляются с данными производителей, необходимо сделать приближения, чтобы повысить точность характеристики камеры [3], [4]. Заявленная эффективность основана на измерениях, проведенных NIST с использованием нескольких рупорных и логопериодических антенн, все из которых последовательно демонстрировали эффективность, близкую к заявленным значениям.
Примечание - Несогласованность антенны зависит среди прочих факторов от волнового сопротивления окружающей среды и не является свойством самой антенны. Несоответствие не включено в уравнение I.2 и должно приниматься во внимание отдельно.
I.2 Измерение эффективности антенны
Реверберационная камера, пожалуй, является одним из лучших способов экспериментально охарактеризовать относительную эффективность антенны [5]. Путем правильной характеристики реверберационной камеры с использованием пары хорошо охарактеризованных антенн и замены антенны неизвестной эффективности можно определить относительную эффективность неизвестной антенны. Этот тип измерения потребовал бы тщательной процедуры испытания, чтобы определить эффективность с точностью до нескольких процентов.
Такая процедура, как правило, требует очень большого количества измерений, чтобы получить требуемую точность.
IEEE standard definitions of terms for antennas, IEEE Std. 145 - 1993, 21 Jun. 1993 | |
NEWMAN E.H., BOHLEY P. and WALTER C.H. Two methods for the measurement of antenna efficiency, IEEE Trans. Antennas Propag., Jul. 1975, vol. 23 no. 4, pp. 457 - 461 | |
LADBURY J.M., KOEPKE G.H. and CAMELL D.G. Evaluation of the NASA Langley Research Center mode-stirred chamber facility, National Institute for Standards and Technology (US), Technical Note 1508, Jan. 1999 | |
JOHNSON R.H. and McRORY J.G. An improved small antenna radiation-efficiency measurement method IEEE, Antennas Propag. Mag., Oct. 1998, vol. 40 no. 5, pp. 40 - 48 | |
ROSENGREN K., KILDAL P.-S., CARLSSON C. and CARLSSON J. Characterization of antennas for mobile and wireless terminals in reverberation chambers: improved accuracy by platform stirring, Microw. Opt. Techn. Lett., 2001, vol. 130, p. 6 |
(справочное)
ПРЯМАЯ ОЦЕНКА ЭФФЕКТИВНОСТИ РЕВЕРБЕРАЦИИ С ИСПОЛЬЗОВАНИЕМ
КОЭФФИЦИЕНТОВ АНИЗОТРОПИИ ПОЛЯ И НЕОДНОРОДНОСТИ ПОЛЯ
J.1 Обзор
J.1.1 В практике проверки и испытания реверберационных камер важным вопросом является то, насколько "близко" фактическая камера напоминает идеальную реверберационную камеру на частоте измерения. Чтобы количественно оценить эту фактическую эффективность реверберации, можно проанализировать данные регулятора, например, с использованием соответствующего статистического теста на соответствие. Такая проверка гипотезы оценивает несоответствие между измеренными и теоретическими (идеальными) функциями распределения поля или плотности мощности на заранее определенном приемлемом уровне. Этот уровень может иметь неодинаковое значение для различных типов испытаний на соответствие требованиям [1] <12>, [2], [3] и, возможно, для разных камер. Кроме того, статистика отдельных компонентов поля предоставляет только косвенную информацию о количествах, представляющих реальный интерес для отраженных полей, а именно однородность поляризации (изотропия поля) или пространственная однородность (однородность поля). Таким образом, тест на доброкачественность дает в основном качественное представление об эффективности перемешивания в этой камере, и результатом часто является неколичественное утверждение о "хороших" или "плохих" характеристиках реверберации.
--------------------------------
<12> Цифры в квадратных скобках относятся к разделу J.6 "Справочные документы" в конце настоящего приложения.
J.1.2 Альтернативным, но количественным подходом является использование детерминированных показателей для оценки эффективности перемешивания, а именно с использованием коэффициентов плоской и полной анизотропии поля, как обсуждается ниже, которые непосредственно выражают степень изотропии поля и однородности поля и не требуют использования статистических распределений отдельных ортогональных компонентов для поля или плотности мощности. Это относительно быстрый способ оценить эффективность регулятора и камеры.
J.2 Коэффициенты анизотропии поля
J.2.1 Определения
Коэффициенты анизотропии плоского и полного полей,  и Atot соответственно, определяются через их средние значения по перемешиванию как [4], [5], [6]:
и Atot соответственно, определяются через их средние значения по перемешиванию как [4], [5], [6]:


где  и
и  представляют измеренную полученную напряженность поля и плотность мощности соответственно произвольной ортогональной составляющей
представляют измеренную полученную напряженность поля и плотность мощности соответственно произвольной ортогональной составляющей  или
или  для данного состояния (положения) мешалки
для данного состояния (положения) мешалки  ;
;
для данного состояния (положения) мешалки Pi - полезная (т.е. прямая минус отраженная) входная мощность, подаваемая в камеру при  для измеренных
для измеренных  или
или  , а <.> обозначает перемешивание (т.е. совокупность), которое усредняется по всем
, а <.> обозначает перемешивание (т.е. совокупность), которое усредняется по всем  , как определено в B.1.2 (10).
, как определено в B.1.2 (10).
Определения для уравнений (J.1) и (J.2) не зависят от  , но они зависят от вариаций Pi с
, но они зависят от вариаций Pi с  . Физически определение Atot как среднеквадратичного значения индивидуального
. Физически определение Atot как среднеквадратичного значения индивидуального  дает в единственном параметре меру смещения среднего направления поляризации электрического поля, которое существует, когда это среднее направление рассматривается в (спроецированном на) трех ортогональных плоскостях.
дает в единственном параметре меру смещения среднего направления поляризации электрического поля, которое существует, когда это среднее направление рассматривается в (спроецированном на) трех ортогональных плоскостях.
(1) Сначала определяется требуемое минимальное количество некоррелированных состояний мешалки N, как указано в разделе A.3. Это должно быть сделано в соответствии со спецификациями пользователя для уровня максимально допустимой неопределенности характеристики коэффициентов анизотропии поля.
Примечание 1 - Для "хорошего" качества перемешивания значение  того же порядка, что и величина связанного с ним стандартного отклонения. Последнее соответствует средним значениям "хорошего" качества перемешивания, приведенным в таблице J.1 (эта таблица служит "руководством по надлежащей практике" при проектировании камеры и мешалки). Рекомендуется выбрать N, равное 100 или более, для оценки одной камеры (по крайней мере N = 30 для получения значимых результатов) и N = 300 для сравнений между камерами. Минимальное значение для N может быть определено апостериори из большой выборки, следуя процедуре, описанной в J.2.4.1. Предостережение: в целом, чем ниже выбранное значение N, тем менее значимыми будут результаты для
того же порядка, что и величина связанного с ним стандартного отклонения. Последнее соответствует средним значениям "хорошего" качества перемешивания, приведенным в таблице J.1 (эта таблица служит "руководством по надлежащей практике" при проектировании камеры и мешалки). Рекомендуется выбрать N, равное 100 или более, для оценки одной камеры (по крайней мере N = 30 для получения значимых результатов) и N = 300 для сравнений между камерами. Минимальное значение для N может быть определено апостериори из большой выборки, следуя процедуре, описанной в J.2.4.1. Предостережение: в целом, чем ниже выбранное значение N, тем менее значимыми будут результаты для  и
и  , особенно когда N < 30.
, особенно когда N < 30.
Таблица J.1
для "среднего" и "хорошего" качества реверберации
N = 10 | N = 30 | N = 100 | N = 300 | |
"Среднее" качество перемешивания | -2,5 дБ | -5 дБ | -7,5 дБ | -10 дБ |
"Хорошее" качество перемешивания | -5 дБ | -10 дБ | -12,5 дБ | -15 дБ |
(2) Величины поля  или плотности мощности
или плотности мощности  при
при  измеряются для N состояний мешалки
измеряются для N состояний мешалки  , выбранных частот f и расположения приемной антенны r внутри камеры.
, выбранных частот f и расположения приемной антенны r внутри камеры.
или плотности мощности измеряются для N состояний мешалки Примечание 2 - Процедуры и критерии измерения описаны в B.1.2 (1) - (8), за исключением того, что теперь записываются все значения амплитуды (измеренные для каждого  ), а не только максимальные и средние значения. Для трехосных полевых датчиков следует использовать индивидуальные показания элементов датчиков (диполей) x, y, z. Для измерений дипольной, рупорной антенны или волновода три ортогональные ориентации апертуры генерируются путем переориентации антенны или волновода между измерениями. Для каждой ориентации отверстие должно быть центрировано вокруг одной и той же центральной точки r.
), а не только максимальные и средние значения. Для трехосных полевых датчиков следует использовать индивидуальные показания элементов датчиков (диполей) x, y, z. Для измерений дипольной, рупорной антенны или волновода три ортогональные ориентации апертуры генерируются путем переориентации антенны или волновода между измерениями. Для каждой ориентации отверстие должно быть центрировано вокруг одной и той же центральной точки r.
(3) Для повышения точности значение Pi должно измеряться для каждого отдельного состояния мешалки; в противном случае для получения номинального среднего значения  вместо Pi берется среднее значение по крайней мере для 10 некоррелированных состояний мешалки. Измерение Pi должно быть повторено для различных частот и расположения антенн.
вместо Pi берется среднее значение по крайней мере для 10 некоррелированных состояний мешалки. Измерение Pi должно быть повторено для различных частот и расположения антенн.
Примечание 3 - Где измерения  не выполняются, оценка
не выполняются, оценка  должна быть произведена вместе с окончательными значениями
должна быть произведена вместе с окончательными значениями  и
и  . Значение Pi в уравнениях (J.1) и (J.2) уменьшается для повышения качества реверберации.
. Значение Pi в уравнениях (J.1) и (J.2) уменьшается для повышения качества реверберации.
(4) Для каждого состояния  и фиксированной частоты и местоположения антенны рассчитайте коэффициенты:
и фиксированной частоты и местоположения антенны рассчитайте коэффициенты:
 or
or  (J.3)
(J.3) (J.4)
(J.4)(5) Усредненные по перемешиванию, т.е. усредненные по  анизотропии плоского и полного полей
анизотропии плоского и полного полей  и
и  , рассчитываются согласно уравнениям (J.1) и (J.2) на выбранной частоте и местоположении антенны.
, рассчитываются согласно уравнениям (J.1) и (J.2) на выбранной частоте и местоположении антенны.
(7) Повторите шаги (2) - (5) для каждого интересующего местоположения антенны. Объемное среднее значение должно быть указано дополнительно на основе вычисления среднего арифметического индивидуальных средних значений перемешивания  и
и  по трем или восьми местоположениям антенны или полевого датчика для каждой частоты в соответствии с процедурой, описанной в B.1.2 (10) (b).
по трем или восьми местоположениям антенны или полевого датчика для каждой частоты в соответствии с процедурой, описанной в B.1.2 (10) (b).
Описанная выше процедура предназначена для работы в режиме регулятора, но может также использоваться для работы в режиме перемешивания при условии учета соображений, изложенных в приложении C. Там, где усреднение перемешивания является значительным, сначала должно применяться обратное локальное усреднение во временной области (перемешивание) [5], [7], [8] (см. также J.2.2.2 и J.5.2).
J.2.2.2 Там, где это возможно, измерения должны проводиться с помощью электрически малых антенн или датчиков поля (типичная длина менее одной трети длины волны), поскольку локальное усреднение влияет на измеряемые изменения поля (характеристики реверберации) по сравнению с физическими изменениями. Как вариант, влияние пространственного усреднения датчиком на измеренные значения  и
и  должно учитываться путем повторного масштабирования измеренных значений до идеализированных точечных значений.
должно учитываться путем повторного масштабирования измеренных значений до идеализированных точечных значений.
J.2.3 Распределения
J.2.3.1 Сравнение между теоретическим и измеренным распределениями  и Atot является необязательным и обеспечивает в основном качественную меру между идеальной и реалистичной изотропией и однородностью поля. Теоретические и измеренные распределения
и Atot является необязательным и обеспечивает в основном качественную меру между идеальной и реалистичной изотропией и однородностью поля. Теоретические и измеренные распределения  и Atot (см. J.5.1) сходятся по аналогичной схеме, что и соответствующие распределения более фундаментальной величины поля или плотности мощности, но являются более практичными.
и Atot (см. J.5.1) сходятся по аналогичной схеме, что и соответствующие распределения более фундаментальной величины поля или плотности мощности, но являются более практичными.
J.2.3.2 На рисунке J.1 показаны типичные кумулятивные функции распределения (CDFs) для  и Atot в реверберационной камере с хорошим перемешиванием. Хотя отдельные
и Atot в реверберационной камере с хорошим перемешиванием. Хотя отдельные  близки к идеальным теоретическим характеристикам, Atot более чувствителен к несовершенствам камеры. На рисунке J.2 показаны соответствующие распределения для данных регулятора, взятых из камеры с относительно слабым перемешиванием.
близки к идеальным теоретическим характеристикам, Atot более чувствителен к несовершенствам камеры. На рисунке J.2 показаны соответствующие распределения для данных регулятора, взятых из камеры с относительно слабым перемешиванием.
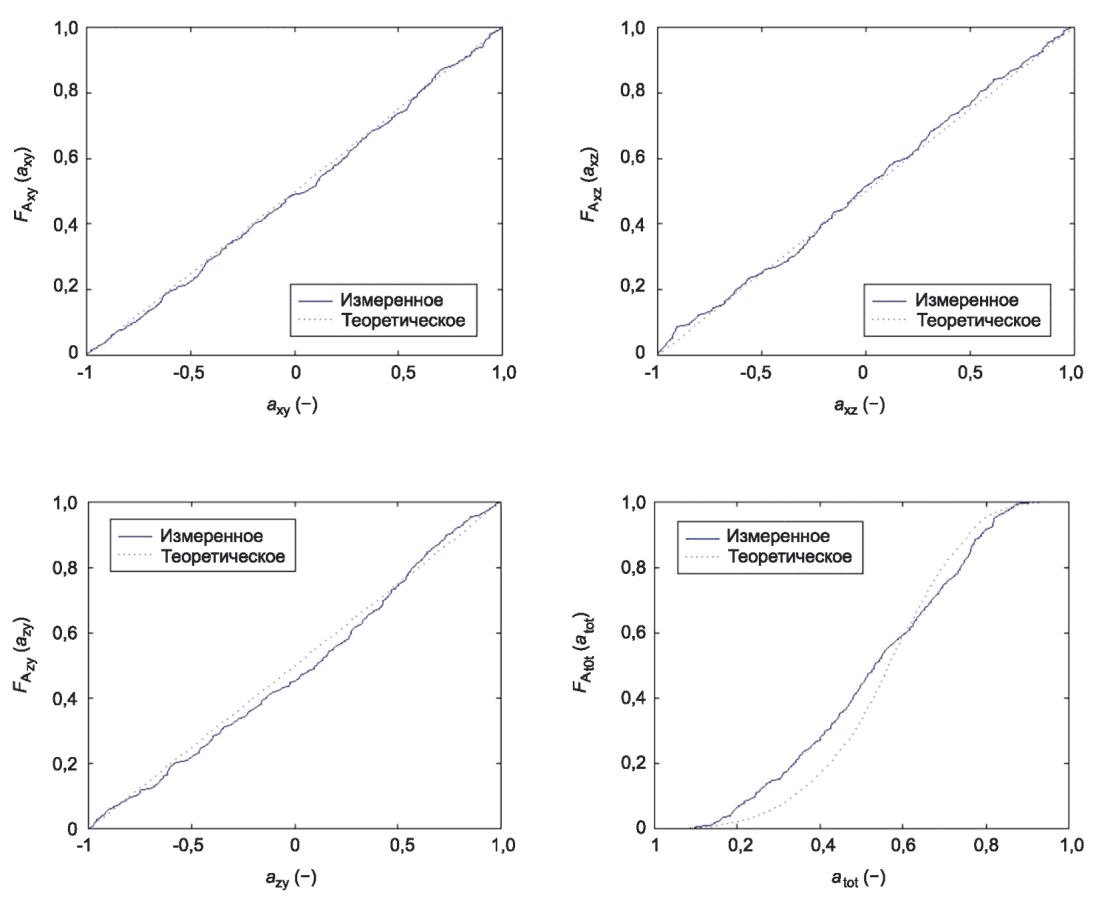
распределения коэффициентов анизотропии поля в камере
с хорошим перемешиванием
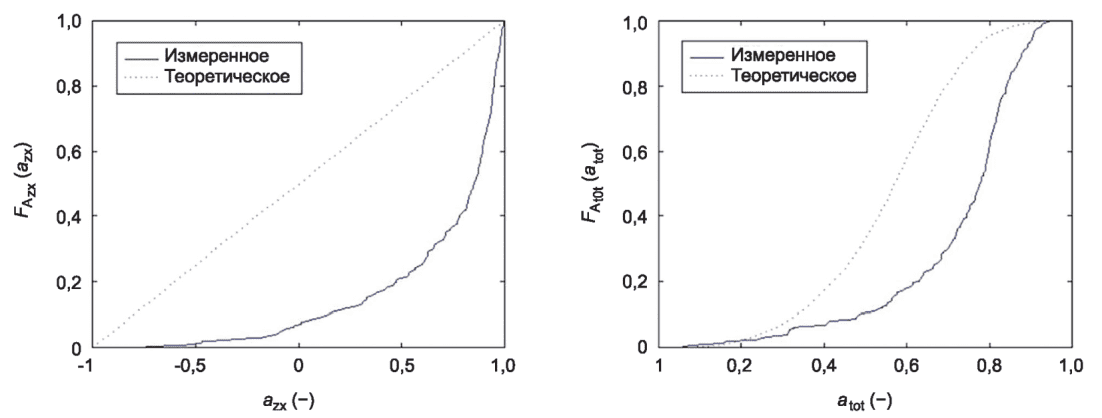
распределения коэффициентов анизотропии поля в камере
со слабым перемешиванием
J.2.4.1 В камере реверберации с идеальным режимом перемешивания значения  и
и  стремятся к нулю, поскольку число некоррелированных состояний мешалки становится произвольно большим. В камере со слабым перемешиванием
стремятся к нулю, поскольку число некоррелированных состояний мешалки становится произвольно большим. В камере со слабым перемешиванием  и
и  для всех состояний мешалок
для всех состояний мешалок  и в среднем
и в среднем  и
и  , где std(.) - стандартное отклонение относительно
, где std(.) - стандартное отклонение относительно  . В частности, ложный "нуль" для
. В частности, ложный "нуль" для  , вызванный таким неправильным выбором
, вызванный таким неправильным выбором  и
и  , что
, что  для всех
для всех  , может произойти в исключительных случаях, или даже
, может произойти в исключительных случаях, или даже  для конкретного выбора
для конкретного выбора  ,
,  и
и  таких, чтобы
таких, чтобы  для всех
для всех  . Это соответствует исключительному случаю, когда направление поляризации поля фиксировано и находится точно под равными углами с направлениями
. Это соответствует исключительному случаю, когда направление поляризации поля фиксировано и находится точно под равными углами с направлениями  ,
,  и
и  для всех состояний мешалки. В таких случаях
для всех состояний мешалки. В таких случаях 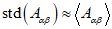 и
и  , как в случае камеры с хорошим перемешиванием. Следовательно, для выявления такого случая необходима дополнительная информация. Следовательно, если
, как в случае камеры с хорошим перемешиванием. Следовательно, для выявления такого случая необходима дополнительная информация. Следовательно, если  или
или  ниже -10 дБ, выполняется второе измерение для различных ориентаций всех трех
ниже -10 дБ, выполняется второе измерение для различных ориентаций всех трех  ,
,  и
и  для датчика(ов). Ложные "нули" могут легко быть обнаружены путем расчета
для датчика(ов). Ложные "нули" могут легко быть обнаружены путем расчета  для различных субвыборок размером M (<= N), взятых для оригинальной последовательности мешалки и анализа
для различных субвыборок размером M (<= N), взятых для оригинальной последовательности мешалки и анализа  как функции M. Ложный "нуль" в
как функции M. Ложный "нуль" в  затем показывают, как значение, которое не уменьшается, в среднем, как функция при увеличении M. В таком случае значениям
затем показывают, как значение, которое не уменьшается, в среднем, как функция при увеличении M. В таком случае значениям  и
и  следует присвоить значение 1, которое соответствует
следует присвоить значение 1, которое соответствует  для чисто анизотропного поля.
для чисто анизотропного поля.
и для всех состояний мешалок и , где std(.) - стандартное отклонение относительно для всех для конкретного выбора для всех и , как в случае камеры с хорошим перемешиванием. Следовательно, для выявления такого случая необходима дополнительная информация. Следовательно, если J.2.4.2 На рисунке J.3 показаны типичные графики  и
и  вместе с абсолютными значениями их стандартного отклонения, полученными с использованием начальной нагрузки и скользящих средних, в зависимости от размера выборки. Видно, что их значения в среднем уменьшаются с увеличением значений M. Разумные значения для
вместе с абсолютными значениями их стандартного отклонения, полученными с использованием начальной нагрузки и скользящих средних, в зависимости от размера выборки. Видно, что их значения в среднем уменьшаются с увеличением значений M. Разумные значения для  порядка -10, -15 и -20 дБ при N = 300 могут рассматриваться как "умеренные", "хорошие" и "отличные" в большинстве приложений соответственно. Дополнительные усилия по перемешиванию, т.е. действия, необходимые для дальнейшего снижения низких значений
порядка -10, -15 и -20 дБ при N = 300 могут рассматриваться как "умеренные", "хорошие" и "отличные" в большинстве приложений соответственно. Дополнительные усилия по перемешиванию, т.е. действия, необходимые для дальнейшего снижения низких значений  и
и  за счет увеличения N, имеют тенденцию к экспоненциальному увеличению и должны быть тщательно рассмотрены.
за счет увеличения N, имеют тенденцию к экспоненциальному увеличению и должны быть тщательно рассмотрены.
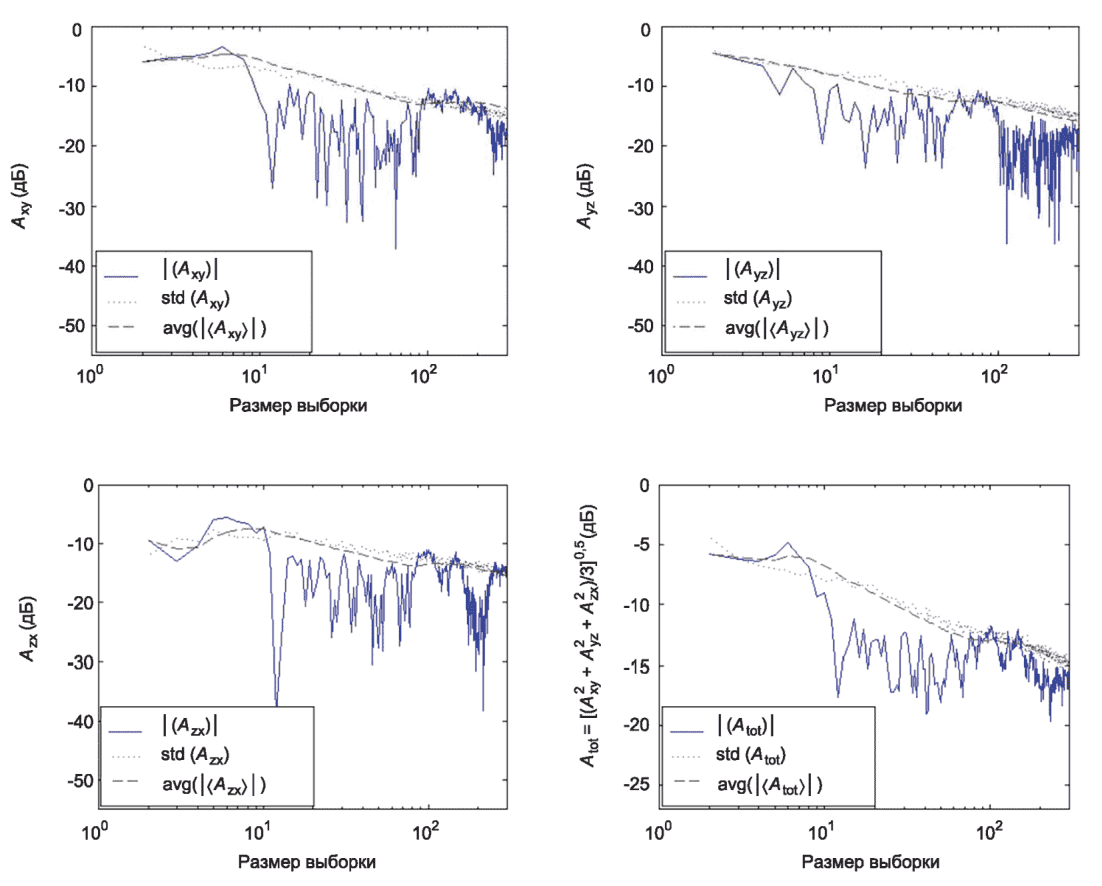
коэффициентов анизотропии поля в зависимости от N
в камере с хорошим перемешиванием
Соответствующий минимальный размер выборки может быть выбран в качестве минимального значения M, для которого  и
и  остаются в пределах выбранного доверительного интервала для этих статистических данных. Обратите внимание, что на рисунке J.3 графики
остаются в пределах выбранного доверительного интервала для этих статистических данных. Обратите внимание, что на рисунке J.3 графики  и
и  выше уровня, определяемого в пределах одного стандартного отклонения для
выше уровня, определяемого в пределах одного стандартного отклонения для  и
и  , гораздо плотнее со стороны слабой M, в противоположность стороне высокого M, потому что данные представлены в логарифмическом масштабе. В этом примере минимальное количество состояний мешалки составляет около 10, когда уровень неопределенности выбран равным одному стандартному отклонению.
, гораздо плотнее со стороны слабой M, в противоположность стороне высокого M, потому что данные представлены в логарифмическом масштабе. В этом примере минимальное количество состояний мешалки составляет около 10, когда уровень неопределенности выбран равным одному стандартному отклонению.
J.2.4.3 С целью взаимного сравнения камер или методов перемешивания приводится выражение для подходящей кривой или, альтернативно, выбранные значения для огибающих  и
и  при N = 10, 30, 100, 300 и подобной эквивалентной выборке независимых точек. Количество эквивалентных
при N = 10, 30, 100, 300 и подобной эквивалентной выборке независимых точек. Количество эквивалентных  независимых точек выборки N может быть определено критерием декорреляции
независимых точек выборки N может быть определено критерием декорреляции  , т.е. соответствующим наибольшей подвыборке N из M, для которой
, т.е. соответствующим наибольшей подвыборке N из M, для которой  для функции автокорреляции данных
для функции автокорреляции данных  из измеренной величины поля или плотность мощности. Не удаляя эту автокорреляцию данных, т.е. с учетом более плотной подвыборки, стандартное отклонение для
из измеренной величины поля или плотность мощности. Не удаляя эту автокорреляцию данных, т.е. с учетом более плотной подвыборки, стандартное отклонение для  и
и  можно уменьшить, но сами средние значения остаются неизменными.
можно уменьшить, но сами средние значения остаются неизменными.
, т.е. соответствующим наибольшей подвыборке N из M, для которой для функции автокорреляции данных В таблице J.1 перечислены значения для  , которые определяют пороговую область для "средней" и "хорошей" эффективности перемешивания. Следует отметить, что при N <= 10 среднее значение
, которые определяют пороговую область для "средней" и "хорошей" эффективности перемешивания. Следует отметить, что при N <= 10 среднее значение  и стандартное отклонение коэффициентов анизотропии поля всегда остаются относительно
и стандартное отклонение коэффициентов анизотропии поля всегда остаются относительно  высокими, независимо от эффективности перемешивания при больших N.
высокими, независимо от эффективности перемешивания при больших N.
J.2.4.4 В случае когда нет трех ортогональных направлений для измеренной напряженности поля или плотности мощности, которые могут быть оценены индивидуально, в одном месте внутри камеры только один коэффициент анизотропии плоского поля может быть оценен из двух измерений, полученных для взаимно перпендикулярных направлений принимающего датчика.
Следует проявлять осторожность, чтобы избежать ложных "нулей", как объясняется в J.2.4.1.
J.3 Коэффициенты неоднородности поля
J.3.1 Определения
Аналогичные коэффициенты определены для неоднородности поля. Одним из удобных вариантов для таких коэффициентов, которые определяют статистическую неоднородность для направления  поляризации
поляризации  или для полного поля
или для полного поля  между двумя местоположениями резонаторов r1 и r2, является
между двумя местоположениями резонаторов r1 и r2, является
или для полного поля  (J.5)
(J.5) (J.6)
(J.6)J.3.2 Процедура оценки
В общем, применяются те же процедуры и комментарии, что и в J.2.2.
Колебания Pi для данного состояния обычно намного меньше при перемещении датчика в два разных места по сравнению с колебаниями, наблюдаемыми для данного местоположения камеры и различных состояний мешалки (см. J.2.2.1). В случае нескольких датчиков эти пространственные флуктуации Pi отсутствуют.
Следует проявлять осторожность, чтобы избежать выбора местоположений r1 и r2, которые  разделены целым числом половинных длин волн для сигнала возбуждения непрерывной волны (CW), или чрезмерно малых расстояний, намного меньших, чем эта длина волны, для которых поля сильно коррелированы. Рекомендуется минимальное расстояние, соответствующее одной длине волны. Процедура
разделены целым числом половинных длин волн для сигнала возбуждения непрерывной волны (CW), или чрезмерно малых расстояний, намного меньших, чем эта длина волны, для которых поля сильно коррелированы. Рекомендуется минимальное расстояние, соответствующее одной длине волны. Процедура  может быть повторена для нескольких местоположений, из которых затем может быть выведено среднее значение
может быть повторена для нескольких местоположений, из которых затем может быть выведено среднее значение  (см. приложение B).
(см. приложение B).
J.3.3 Распределения
J.3.4 Зависимость от размера выборки
Применимы те же соображения, что и для  и Atot (см. J.2.4).
и Atot (см. J.2.4).
J.4 Анизотропия поля в сравнении с неоднородностью поля
Обычно достаточно исследовать либо  , Atot, либо
, Atot, либо  , Itot, поскольку коэффициенты анизотропии поля и однородности поля являются сильно коррелированными статистическими данными [4]. Распределения
, Itot, поскольку коэффициенты анизотропии поля и однородности поля являются сильно коррелированными статистическими данными [4]. Распределения  , Atot, однако, обычно более чувствительны к дефектам перемешивания мод. Можно показать, что статистическая изотропия подразумевает статистическую однородность, но обратное не обязательно верно.
, Atot, однако, обычно более чувствительны к дефектам перемешивания мод. Можно показать, что статистическая изотропия подразумевает статистическую однородность, но обратное не обязательно верно.
Таким образом, оценка анизотропии поля является более строгим критерием из двух.
J.5 Расширения
Коэффициенты анизотропии точечного плоского поля  являются самонормированными величинами, принимающими значения от минус 1 до плюс 1 для каждого состояния мешалки, независимо от значения Pi. Для идеальных условий реверберации (т.е. идеальной изотропии статистического поля) можно показать, что случайная величина
являются самонормированными величинами, принимающими значения от минус 1 до плюс 1 для каждого состояния мешалки, независимо от значения Pi. Для идеальных условий реверберации (т.е. идеальной изотропии статистического поля) можно показать, что случайная величина  имеет равномерное (прямоугольное) распределение, теоретическая кумулятивная функция распределения (CDF) которого задается формулой
имеет равномерное (прямоугольное) распределение, теоретическая кумулятивная функция распределения (CDF) которого задается формулой
 (J.7)
(J.7)т.е. прямая линия с единичным наклоном. Если измеренная CDF преимущественно ниже или выше теоретической CDF, то это указывает на смещение поляризации статистического поля в направлении  или
или  в плоскости
в плоскости  соответственно. Максимальное расстояние DN между измеренными и теоретическими CDF (статистика Колмогорова - Смирнова) служит косвенной мерой анизотропии поля [1].
соответственно. Максимальное расстояние DN между измеренными и теоретическими CDF (статистика Колмогорова - Смирнова) служит косвенной мерой анизотропии поля [1].
соответственно. Максимальное расстояние DN между измеренными и теоретическими CDF (статистика Колмогорова - Смирнова) служит косвенной мерой анизотропии поля [1].Чтобы определить количество положений мешалки (размер выборки), требуемое для получения априори заданного уровня анизотропии поля, повторяют описанную выше процедуру для различных чисел состояний мешалки (размеров выборки) M и строят соответствующие  и
и  как функцию M. Это можно сделать, просто взяв подмножество из M точек данных из одной большой развертки регулятора. Определяют огибающую X' измеренных
как функцию M. Это можно сделать, просто взяв подмножество из M точек данных из одной большой развертки регулятора. Определяют огибающую X' измеренных  и
и  из:
из:
 (J.8)
(J.8)где X представляет  и
и  , с
, с
 (J.9)
(J.9)Как вариант, можно применить более простой локальный фильтр скользящего усреднения к измеренному образцу, где усреднение выполняется по длине, не превышающей 3% от максимальной длины последовательности перемешивания, т.е. заменяя исходную последовательность  на:
на:
 (J.10)
(J.10)с L/M <= 0,03.
ARNAUT L.R. and WEST P.D. Electric field probe measurements in the NPL untuned stadium reverberation chamber, National Physical Laboratory (UK), Technical Report CETM 13, Sep. 1999, Appendix H | |
ARNAUT L.R. Compound exponential distributions for undermoded reverberation chambers, IEEE Trans. EMC, May 2002, vol. 44 no. 2, pp. 442 - 457 | |
LUNDEN O. and  M. Stirrer efficiency in FOA reverberation chambers: evaluation of correlation coefficients and chi-squared tests, Proc. IEEE Int. Symp. EMC, Washington, DC, Aug. 21 - 25, 2000, pp. 11 - 16 M. Stirrer efficiency in FOA reverberation chambers: evaluation of correlation coefficients and chi-squared tests, Proc. IEEE Int. Symp. EMC, Washington, DC, Aug. 21 - 25, 2000, pp. 11 - 16 | |
ARNAUT L.R. and WEST P.D. Evaluation of the NPL untuned stadium reverberation chamber using mechanical and electronic stirring techniques, National Physical Laboratory (UK), Technical Report CEM 11, Aug. 1998 |
(справочное)
ПРОВЕДЕНИЕ ИСПЫТАНИЙ НА ИЗЛУЧАЕМЫЕ РАДИОПОМЕХИ
И ПОМЕХОУСТОЙЧИВОСТЬ
K.1 Общие замечания
K.1.1 Неопределенность измерений в стандартизации
Стандартные методологии для выражения и оценки общей неопределенности измерений (MU), не ограниченные электромагнитной совместимостью, рассматриваются в [1] <13>. Соображения по оценке MU в методах испытаний на электромагнитную совместимость приведены в [2] и [3]. Более подробное описание выражения MU для реверберационных камер (RCs) приведено в [4].
--------------------------------
<13> Цифры в квадратных скобках относятся к разделу K.4 "Справочные документы" в конце настоящего приложения.
K.1.2 Погрешность измерения в реверберационных камерах по сравнению с другими альтернативными методами испытаний на электромагнитную совместимость
По сравнению с MU для других альтернативных методов испытаний на электромагнитную совместимость на плоской волне, определенные затраты на MU (например, недостатки камеры, аспекты окружающей среды, эффекты антенны, приборы и т.д.) также применимы к камерам реверберации. Другие факторы (например, прокладка кабеля, ориентация и расстояние между ИО и антенной, допуск положения и т.д.) менее или вовсе не значимы в RC, тогда как неопределенность из-за изначально случайного характера поля в RC является основным дополнительным вкладом в общую MU, уникальным для RCs.
K.1.3 Внутренняя неопределенность поля в сравнении с неопределенностью измерительных приборов
Подробный расчет полного бюджета MU [2], [3] выходит за рамки данного приложения, в котором рассматриваются только взносы в MU, характерные для реверберационной камеры. Здесь рассматривается дополнительный вклад внутренней неопределенности поля (IFU), обусловленный статистической природой поля внутри RC. Только идеализированные условия эксплуатации (режим перегрузки) поддаются отслеживаемой оценке MU [4]. Здесь речь идет только о таких условиях. Влияние несовершенств случайного поля на его неопределенность и доверительные интервалы обсуждается в A.2.2.
Напряженность поля и плотность мощности внутри реверберационной камеры являются случайными величинами из-за высокой чувствительности поля резонатора к изменениям границ или возбуждению в пространстве или времени. Для типичных условий эксплуатации (исключая камеры с чрезвычайно высоким фактором качества, такие как сварные алюминиевые камеры) внутренняя неопределенность поля или мощности доминирует над неопределенностью измерительных приборов (MIU) на один порядок величин или более. Для сравнения относительных вкладов MIU и IFU в общую MU на заданной частоте f стандартное отклонение прямоугольной (одноосной) составляющей синфазной или квадратурной составляющей электрического поля, возникающей в результате IFU, определяется как
 (K.1)
(K.1)где  - диэлектрическая проницаемость свободного пространства (~= 8,85·10-12 Ф/м);
- диэлектрическая проницаемость свободного пространства (~= 8,85·10-12 Ф/м);
Q(f) - фактор качества камеры на частоте f;
f - частота работы, Гц;
V(f) - рабочий объем камеры при частоте f, м3;
Стандартное отклонение плотности мощности и величины поля составляет  и
и  соответственно, где
соответственно, где  - собственное сопротивление свободного пространства (377 Ом). IFU зависит главным образом от количества независимых образцов, которые выбираются для создания в процессе проверки камеры или испытания на электромагнитную совместимость. IFU обычно уменьшается обратно пропорционально квадратному корню из этого числа (см. обсуждение в A.4.2 и A.4.3). На IFU также влияет максимальное количество независимых проб, которые способна генерировать режимная мешалка в этом RC. В общем, конечность этого максимального числа приводит к уменьшению MU. Для целей настоящего приложения предполагается, что это максимальное число бесконечно, что представляет собой наихудший сценарий, который может быть достигнут при сколь угодно высоких частотах.
- собственное сопротивление свободного пространства (377 Ом). IFU зависит главным образом от количества независимых образцов, которые выбираются для создания в процессе проверки камеры или испытания на электромагнитную совместимость. IFU обычно уменьшается обратно пропорционально квадратному корню из этого числа (см. обсуждение в A.4.2 и A.4.3). На IFU также влияет максимальное количество независимых проб, которые способна генерировать режимная мешалка в этом RC. В общем, конечность этого максимального числа приводит к уменьшению MU. Для целей настоящего приложения предполагается, что это максимальное число бесконечно, что представляет собой наихудший сценарий, который может быть достигнут при сколь угодно высоких частотах.
и соответственно, где IFU может быть уменьшен за счет увеличения количества модальных мешалок или механизмов перемешивания для обеспечения дополнительного сканирования или усреднения. Некоторые аспекты и результаты приведены в [4]. Здесь рассматривается только один регулятор механического режима, без пространственного или частотного сканирования.
K.2 Излучаемые радиопомехи
Для измерений излучаемых радиопомех типичной первичной величиной, представляющей интерес, является средняя плотность передаваемой мощности излучения, интегрированная по всем пространственным направлениям, а также по распространению и поляризации. Иногда максимальная плотность мощности или напряженность поля (средняя или максимальная) представляет собой интересующую величину, которая может быть получена из измеренной передаваемой мощности.
Используя метод подстановки [2], среднее значение общей мощности, излучаемой ИО, может быть связано с его средней мощностью  , полученной внутри идеальной камеры реверберации как
, полученной внутри идеальной камеры реверберации как
где CLF - коэффициент нагрузки ИО для камеры на частоте f (см. приложение B);
PTx,ref - мощность, передаваемая в ненагруженную камеру (т.е. без ИО) при N положениях регулятора или мешалки;
PRx,ref - мощность, получаемая в ненагруженной камере при N положениях регулятора/мешалки;
PTx - это мощность, получаемая в камере с ИО при N положениях регулятора/мешалки.
Примечание - Для оценки средней мощности  положения мешалки не обязательно должны быть статистически независимыми. Однако для оценки неопределенности измерений для
положения мешалки не обязательно должны быть статистически независимыми. Однако для оценки неопределенности измерений для  требуются независимые выборки.
требуются независимые выборки.
Выборочное среднее значение для N выборочных значений принятой мощности PRx,1, PRx,N равно
Для N статистически независимых положений мешалки стандартное отклонение среднего значения составляет

 (K.5)
(K.5)Для больших значений N  распределяется приблизительно нормально, с 95%-ным доверительным интервалом, заданным
распределяется приблизительно нормально, с 95%-ным доверительным интервалом, заданным

Когда N < 30, доверительный интервал имеет сопоставимую ширину, но показывает сдвиг в сторону увеличения по сравнению с уравнением нормальной аппроксимации (K.6) [4].
На частотах, для которых выполняется критерий однородности поля, соответствующий доверительный интервал для  равен
равен

с
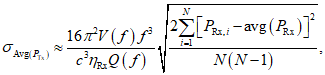
где c - скорость света в вакууме, приблизительно 3 x 108 м/с;
Q(f) - фактор качества камеры при f (безразмерный);
V(f) - рабочий объем камеры при f, м3.
Оценка (7) предполагает, что неопределенность оценки Q, основанной на измерениях, пренебрежимо мала по сравнению с  . В противном случае уравнение (K.8) обобщается до
. В противном случае уравнение (K.8) обобщается до
. В противном случае уравнение (K.8) обобщается до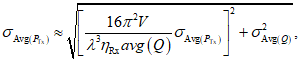 (K.9)
(K.9)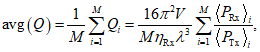 (K.10)
(K.10)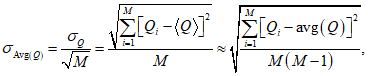 (K.11)
(K.11)получены путем оценки Q в M различных местоположениях приемной антенны, которые разнесены друг от друга по меньшей мере на половину длины волны. Здесь среднее значение (PRx) вычисляется на основе N x M измеренных значений во время проверки камеры, т.е. N и N - 1 в уравнениях (K.3) и (K.4) заменены на N x M и (N - (-1)) x (M - (-1)) соответственно, при N, M > 1.
Для камеры, которая достаточно хорошо отражается и при условии, что источник излучения не нагружает камеру (CVF = 1),  может быть оценена путем измерения параметра S21 между парой приемо-передающих антенн или измерения принятой мощности для известной эталонной входной мощности как [4]:
может быть оценена путем измерения параметра S21 между парой приемо-передающих антенн или измерения принятой мощности для известной эталонной входной мощности как [4]:
может быть оценена путем измерения параметра S21 между парой приемо-передающих антенн или измерения принятой мощности для известной эталонной входной мощности как [4]: (K.12)
(K.12)Эффект несоответствия импеданса становится значительным, когда  .
.
.Рисунок K.1 показывает оценочное среднее значение и ширину соответствующего 95%-ного доверительного интервала для излучаемой мощности, полученной при измерении эталонного излучающего ИО, в зависимости от частоты, для одного или трех местоположений ИО. Рисунок K.2 сравнивает стандартную неопределенность для передаваемой мощности и ее среднее значение за 100 положений мешалки с идеальными теоретическими значениями.
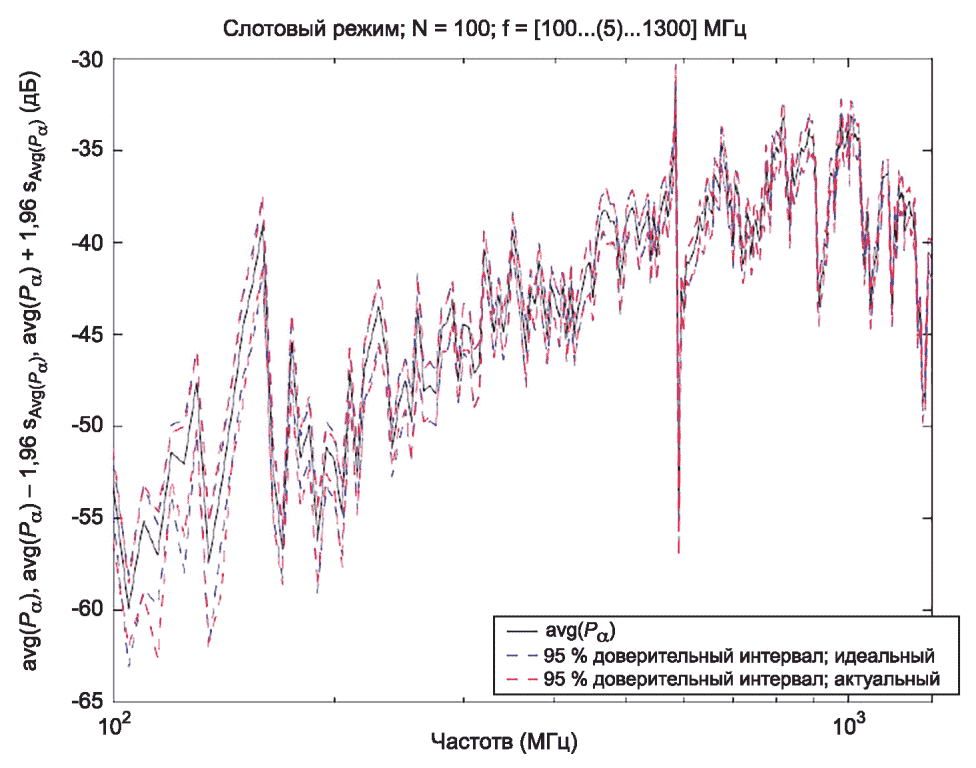
от частоты для типичного непреднамеренного излучателя
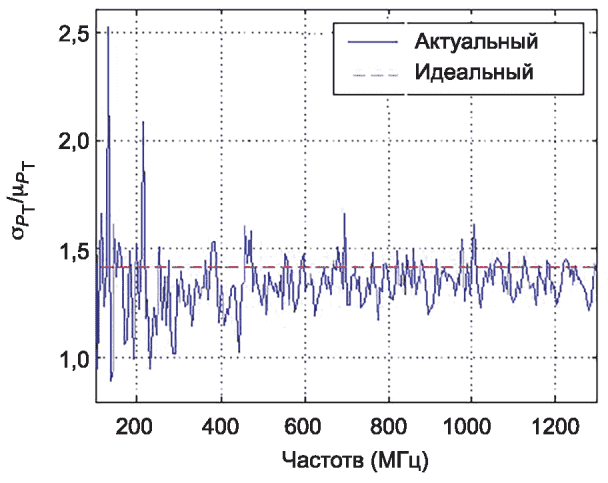 | 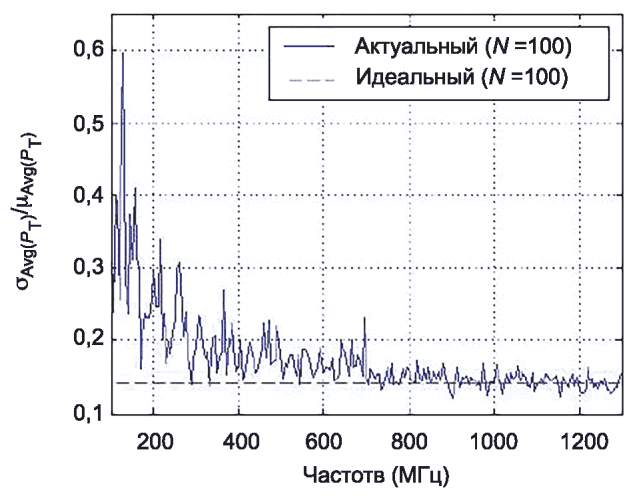 |
Примечание - Расчетная стандартная неопределенность, нормированная по отношению к среднему значению: (a) для излучаемой мощности от ИО (см. рисунок K.2, a)) и (b) для соответствующей средней мощности излучения, по сравнению с теоретическими стандартными неопределенностями для характеристик идеальной камеры  и
и  соответственно (см. рисунок K.2, b)). Измеренные, соответственно идеализированные корреляции между S-параметрами учитываются в обоих случаях.
соответственно (см. рисунок K.2, b)). Измеренные, соответственно идеализированные корреляции между S-параметрами учитываются в обоих случаях.
соответственно (см. рисунок K.2, b)). Измеренные, соответственно идеализированные корреляции между S-параметрами учитываются в обоих случаях.Для измерения в нескольких положениях M испытуемого оборудования значение MU расчетной средней излучаемой мощности уменьшается до коэффициента  .
.
K.3 Помехоустойчивость
Как правило, при измерениях помехозащищенности критерий "прошел" или "не прошел" определяет, показывает ли EUT признаки отказа при облучении с известной напряженностью поля или мощностью. Оценка уровней неопределенности, приведенная ниже, не учитывает неопределенность в процессе интерпретации признака отказа, а только учитывает неопределенность при настройке заданной напряженности поля.
Испытание помехоустойчивости в реверберационных камерах обычно проводится по максимальной напряженности поля или максимальной энергии или плотности мощности за один оборот модального регулятора, а не по среднему полю или мощности. Эти максимальные значения сами по себе являются случайными (статистическими) величинами относительно пространственного положения. Следовательно, связанные с этим неопределенности значительно больше, чем в случае излучаемых радиопомех.
Предполагая нулевую неопределенность для Q фактора, рабочего объема и передаваемой мощности, доверительный интервал  для
для  , принимаемый от передатчика с согласованным импедансом без потерь, имеет границы, заданные
, принимаемый от передатчика с согласованным импедансом без потерь, имеет границы, заданные
, принимаемый от передатчика с согласованным импедансом без потерь, имеет границы, заданные (K.13)
(K.13)где  - импеданс свободного пространства, Ом;
- импеданс свободного пространства, Ом;
V - рабочий объем камеры, м3;
Q - фактор качества камеры при длине волны  (безразмерный);
(безразмерный);
N - количество статистически независимых положений регулятора/мешалки на длине волны  .
.
Интервал сосредоточен вокруг среднего значения  , которое может быть оценено как
, которое может быть оценено как
, которое может быть оценено какИС МЕГАНОРМ: примечание. Формула дана в соответствии с официальным текстом документа. |
 (K.14)
(K.14)Ширина доверительного интервала определяется разностью верхнего и нижнего процентилей, нормализованных по среднему значению, как
 (K.15)
(K.15)Аналогичные выражения для максимальной принимаемой мощности могут быть получены согласно [4]. Пределы и ширина доверительного интервала для  и
и  показаны на рисунках K.3 и K.4 в зависимости от N для выбранных значений
показаны на рисунках K.3 и K.4 в зависимости от N для выбранных значений  . Рисунок K.3 показывает, что при относительно низких значениях N асимметрия этого интервала существенна. Как вариант, MU может быть выражен с использованием расширенной неопределенности, основанной на выражениях для стандартного отклонения
. Рисунок K.3 показывает, что при относительно низких значениях N асимметрия этого интервала существенна. Как вариант, MU может быть выражен с использованием расширенной неопределенности, основанной на выражениях для стандартного отклонения  [4], [6], [7].
[4], [6], [7].
и показаны на рисунках K.3 и K.4 в зависимости от N для выбранных значений 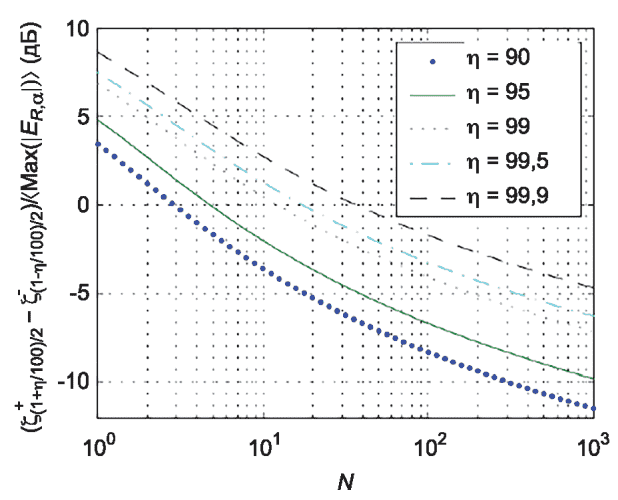 | 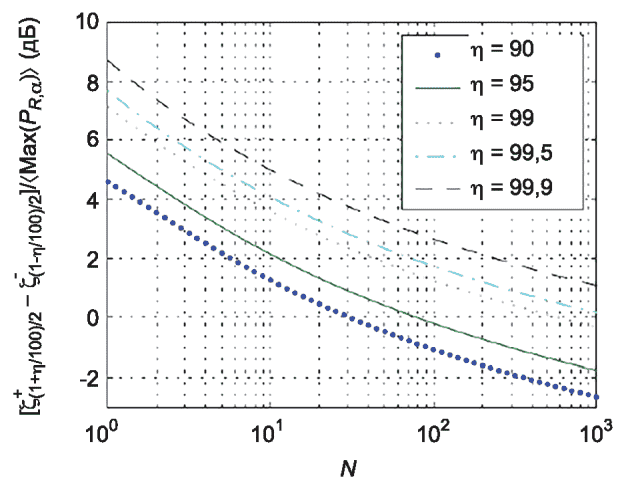 | ||||
| |||||
Примечание - Средняя нормированная ширина  для максимальной напряженности поля для максимальной напряженности поля | Примечание - Средняя нормированная ширина  для максимальной принятой мощности Px,max связана с доверительным интервалом для максимальной принятой мощности Px,max связана с доверительным интервалом | ||||
a) средняя нормированная ширина (в дБ) доверительного интервала | a) средняя нормированная ширина (в дБ) доверительного интервала | ||||
доверительного интервала 
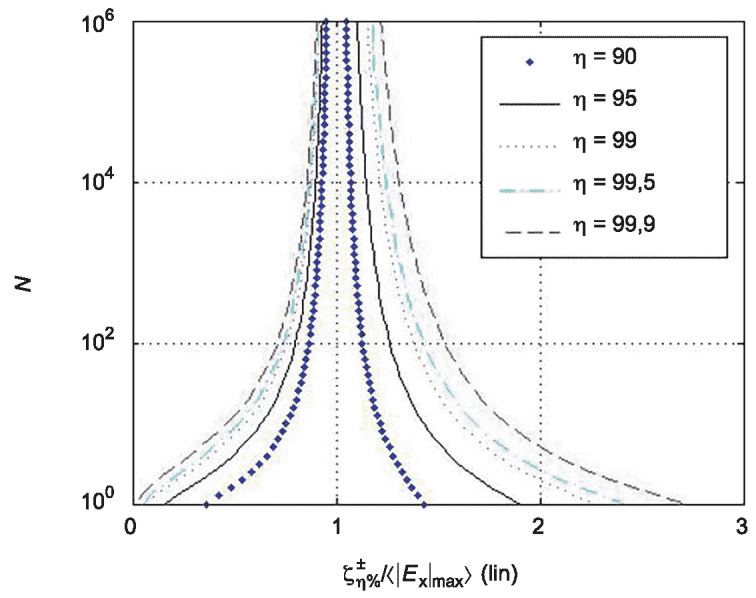
Примечание - Нормированные по среднему значению верхняя и нижняя границы интервала  и
и  определены с доверительным интервалом
определены с доверительным интервалом  для
для  со средней нормализованной шириной
со средней нормализованной шириной  .
.
и определены с доверительным интервалом .нормализованные по среднему значению (в линейных единицах)
для максимальной напряженности поля в зависимости от числа
независимых положений мешалки
Когда среднее значение или стандартное отклонение |Ex| или Px априори неизвестно и должно быть оценено по самим испытательным данным, распределение и доверительные интервалы более сложны [4] и неопределенность может быть значительно больше, особенно для малых значений N. Такие малые значения либо выбираются намеренно (чтобы минимизировать время испытания) или неизбежны (на относительно низких частотах).
ISO/IEC Guide 98-3:2008, Uncertainty of measurement - Part 3: Guide to the expression of uncertainty in measurement (GUM: 1995) (Неопределенность измерений. Часть 3. Руководство по выражению неопределенности измерений (GUM: 1995)) | |
CISPR/TR 16-4-1, Specification for radio disturbance and immunity measuring apparatus and methods - Part 4-1: Uncertainties, statistics and limit modelling - Uncertainty in standarized EMC tests (Технические требования к приборам и методам измерения радиопомех и помехозащищенности. Часть 4-1. Неопределенности, статистика и моделирование пределов. Неопределенность при стандартных испытаниях на электромагнитную совместимость) | |
CISPR 16-4-2, Specification for radio disturbance and immunity measuring apparatus and methods - Part 4-2: Uncertainties, statistics and limit modelling - Uncertainties in EMC measurements (Технические требования к приборам и методам измерения радиопомех и помехозащищенности. Часть 4-2. Неопределенности, статистика и моделирование пределов. Неопределенности в измерениях электромагнитной совместимости) | |
ARNAUT L.R. Measurement uncertainty in reverberation chambers - I. Sample statistics, National Physical Laboratory (UK), Report TQE 2, Ed. 2.0, Dec. 2008 [http://publications.npl.co.uk/npl_web/pdf/TQE2.pdf] | |
CORONA P., LATMIRAL G., PAOLINI E. and PICCIOLI L. Use of a reverberating enclosure for measurements of radiated power in the microwave range, IEEE Trans. Electromagn. Compat., vol. 18 no. 2, pp. 54 - 59, May 1976; Comments and corrections, ibid., vol. 18 no. 4, p. 205, Nov. 1976 | |
LADBURY J., KOEPKE G. and CAMELL D. Evaluation of the NASA Langley Research Center mode-stirred chamber facility, Nat. Inst. Stand. Technol., Technical Note 1508, pp. 1 - 282, Jan. 1999 | |
ARNAUT L.R. Estimation of maximum field strength and associated confidence intervals for EMC immunity testing in reverberation chambers, Safety & EMC (Beijing), pp. 16 - 19, May 2008 (special issue) | |
HARRINGTON T.E. Update on informal interlaboratory comparison of reverb, GTEM, FAR, and OATS sites using RefRad and EU FAR Project Simple EUT, Proc. Reverberation Chamber, Anechoic Chamber and OATS Users Meeting, Austin, TX, 29 - 30 Apr. 2003 |
(справочное)
МЕЖГОСУДАРСТВЕННЫМ СТАНДАРТАМ
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
IEC 60050-161:1990 Amendment 1:1997 Amendment 2:1998 | MOD | ГОСТ 30372-2017 (IEC 60050-161:1990) "Совместимость технических средств электромагнитная. Термины и определения" |
IEC 61000-4-3:2006 Amendment 1:2007 | - | |
CISPR 16-1-1 | IDT | ГОСТ CISPR 16-1-1-2016 "Требования к аппаратуре для измерения радиопомех и помехоустойчивости и методы измерения. Часть 1-1. Аппаратура для измерения радиопомех и помехоустойчивости. Измерительная аппаратура" (CISPR 16-1-1:2015) |
CISPR 16-2-3 | IDT | ГОСТ CISPR 16-2-3-2016 "Требования к аппаратуре для измерения радиопомех и помехоустойчивости и методы измерения. Часть 2-3. Методы измерения радиопомех и помехоустойчивости. Измерения излучаемых радиопомех" (CISPR 16-2-3:2014) |
<*> Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты. - MOD - модифицированный стандарт. | ||
--------------------------------
<1> Действует ГОСТ IEC 61000-4-3-2016 "Электромагнитная совместимость (ЭМС). Часть 4-3. Методы испытаний и измерений. Испытание на устойчивость к излучаемому радиочастотному, электромагнитному полю", идентичный IEC 61000-4-3:2010.
IEC 60050-121:1998, International Electrotechnical Vocabulary - Chapter 121: Electromagnetism (Международный электротехнический словарь. Глава 121. Электромагнетизм)
IEC 60050-151:2001, International Electrotechnical Vocabulary - Part 151: Electrical and magnetic devices (Международный электротехнический словарь. Часть 151. Электрические и магнитные устройства)
IEC 60050-393:2003, International Electrotechnical Vocabulary - Part 393: Nuclear instrumentation - Physical phenomena and basic concepts (Международный электротехнический словарь. Часть 393. Ядерные приборы. Физические явления и основные понятия)
IEC 60050-394:2007, International Electrotechnical Vocabulary - Part 394: Nuclear instrumentation - Instruments, systems, equipment and detectors (Международный электротехнический словарь. Часть 394. Ядерные приборы. Приборы, системы, оборудование и детекторы)
IEC 60050-702:1992, International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices (Международный электротехнический словарь. Глава 702. Колебания, сигналы и связанные с ними устройства)
IEC 60050-705:1995, International Electrotechnical Vocabulary - Chapter 705: Radio wave propagation (Международный электротехнический словарь. Глава 705. Распространение радиоволн)
IEC 60050-712:1992, International Electrotechnical Vocabulary - Chapter 712: Antennas (Международный электротехнический словарь. Глава 712. Антенны)
IEC 60050-723:1997, International Electrotechnical Vocabulary - Chapter 723: Broadcasting: Sound, television, data (Международный электротехнический словарь. Глава 723. Радиовещание: Звук, телевидение, данные)
Amendment 1 (1999) (Изменение 1:1999)
IEC 60050-726:1982, International Electrotechnical Vocabulary - Chapter 726: Transmission lines and waveguides (Международный электротехнический словарь. Глава 726. Линии передачи и волноводы)
IEC 60050-731:1991, International Electrotechnical Vocabulary - Chapter 731: Optical fibre communication (Международный электротехнический словарь. Глава 731. Оптоволоконная связь)
IEC 60050-801:1994, International Electrotechnical Vocabulary - Chapter 801: Acoustics and electro-acoustics (Международный электротехнический словарь. Глава 801. Акустика и электроакустика)
IEC 61000-4-6, Electromagnetic compatibility (EMC) - Part 4-6: Testing and measurement techniques - Immunity to conducted disturbances, induced by radio-frequency fields (Электромагнитная совместимость (ЭМС). Часть 4-6. Методы тестирования и измерения. Невосприимчивость к проводимым помехам, вызванным радиочастотными полями)
CISPR 16-1-2, Specification for radio disturbance and immunity measuring apparatus and methods - Part 1-2: Radio disturbance and immunity measuring apparatus - Ancillary equipment - Conducted disturbances (Спецификация для устройств и методов измерения радиопомех и помехоустойчивости. Часть 1-2. Устройство для измерения радиопомех и помехоустойчивости. Вспомогательное оборудование. Кондуктивные помехи)
CISPR 16-1-3, Specification for radio disturbance and immunity measuring apparatus and methods - Part 1-3: Radio disturbance and immunity measuring apparatus - Ancillary equipment - Disturbance power (Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Часть 1-3. Устройство для измерения радиопомех и помехоустойчивости. Вспомогательное оборудование. Мощность радиопомех)
CISPR 16-1-4, Specification for radio disturbance and immunity measuring apparatus and methods - Part 1-4: Radio disturbance and immunity measuring apparatus - Ancillary equipment - Antennas and test sites for radiated disturbance measurements (Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Часть 1-4. Приборы для измерения радиопомех и помехозащищенности. Вспомогательное оборудование. Антенны и испытательные площадки для измерения излучаемых радиопомех)
CISPR 16-1-5, Specification for radio disturbance and immunity measuring apparatus and methods - Part 1-5: Radio disturbance and immunity measuring apparatus - Ancillary equipment - Antenna calibration test sites for 30 MHz to 1000 MHz (Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Часть 1-5. Приборы для измерения радиопомех и помехозащищенности. Вспомогательное оборудование. Испытательные площадки для калибровки антенн на частоте от 30 МГц до 1000 МГц)
CISPR 16-2-1, Specification for radio disturbance and immunity measuring apparatus and methods - Part 2-1: Methods of measurement of disturbances and immunity - Conducted disturbance measurements (Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Часть 2-1. Методы измерения помех и помехоустойчивости. Измерения кондуктивных радиопомех)
CISPR 16-2-2, Specification for radio disturbance and immunity measuring apparatus and methods - Part 2-2: Methods of measurement of disturbances and immunity - Measurement of disturbance power (Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Часть 2-2. Методы измерения помех и невосприимчивости. Измерение мощности радиопомех)
CISPR 16-2-4, Specification for radio disturbance and immunity measuring apparatus and methods - Part 2-4: Methods of measurement of disturbances and immunity - Immunity measurements (Спецификация для устройств и методов измерения радиопомех и помехозащищенности. Часть 2-4. Методы измерения помех и невосприимчивости. Измерения помехоустойчивости)
CISPR 22, Information technology equipment - Radio disturbance characteristics - Limits and methods of measurement (Оборудование информационных технологий. Характеристики радиопомех. Нормы и методы измерения)
УДК 621.391.827:006.354 | МКС 33.100.01 | IDT |
Ключевые слова: радиопомехи, нормы, методы измерений, реверберационная камера, измерение эффективности экранирования, помехоустойчивость к электромагнитному полю | ||