СПРАВКА
Источник публикации
В данном виде документ опубликован не был.
Первоначальный текст документа опубликован в издании
М.: Издательство стандартов, 1976.
Информацию о публикации документов, создающих данную редакцию, см. в справке к этим документам.
Примечание к документу
С 1 июля 2003 года до вступления в силу технических регламентов акты федеральных органов исполнительной власти в сфере технического регулирования носят рекомендательный характер и подлежат обязательному исполнению только в части, соответствующей целям, указанным в пункте 1 статьи 46 Федерального закона от 27.12.2002 N 184-ФЗ.
Ограничение срока действия снято Постановлением Госстандарта СССР от 18.12.1991 N 1993 ("ИУС", N 3, 1992).
Изменение N 1 введено в действие Постановлением Госстандарта СССР от 30.11.1981 N 5152 с 1 июля 1982 года.
Название документа
"ГОСТ 21752-76. Государственный стандарт Союза ССР. Система человек-машина. Маховики управления и штурвалы. Общие эргономические требования"
(введен в действие Постановлением Госстандарта СССР от 27.04.1976 N 951)
(ред. от 30.11.1981)
"ГОСТ 21752-76. Государственный стандарт Союза ССР. Система человек-машина. Маховики управления и штурвалы. Общие эргономические требования"
(введен в действие Постановлением Госстандарта СССР от 27.04.1976 N 951)
(ред. от 30.11.1981)
Постановлением
Государственного комитета
стандартов Совета Министров СССР
от 27 апреля 1976 г. N 951
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
СИСТЕМА ЧЕЛОВЕК-МАШИНА. МАХОВИКИ УПРАВЛЕНИЯ И ШТУРВАЛЫ
ОБЩИЕ ЭРГОНОМИЧЕСКИЕ ТРЕБОВАНИЯ
Human being-machine system. Control handwheels
and steering wheels. General ergonomic reguirements
ГОСТ 21752-76
Список изменяющих документов Постановлением Госстандарта СССР от 30.11.1981 N 5152) |
Группа Т58
Постановлением Государственного комитета стандартов Совета Министров СССР от 27 апреля 1976 г. N 951 срок действия установлен с 01.01.1977 до 01.01.1982.
Настоящий стандарт распространяется на маховики управления, штурвалы и рулевые колеса систем человек-машина, предназначенные для выполнения ступенчатых переключений и плавного динамического регулирования одной или двумя руками, и устанавливает к ним общие эргономические требования.
Термины и определения, применяемые в настоящем стандарте, указаны в справочном Приложении 2.
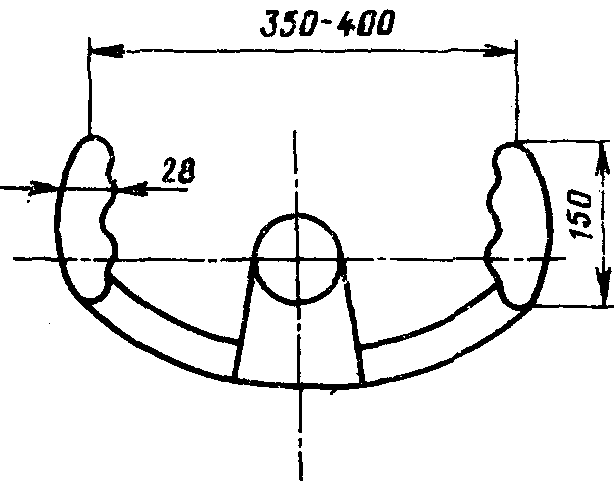
1.1. Обод маховика, захватываемый кистью руки, в поперечном сечении должен иметь круглую, овальную или близкую к ним форму. Поверхность обода должна быть тщательно обработана, без острых углов и заусенцев, и при необходимости надежного удержания в местах соприкосновения с пальцами должна иметь соответствующую им волнистую профилировку.
1.2. Форма и размер рукояток вращения маховиков должны обеспечивать максимальное удобство их захвата и надежного удержания в процессе управления. При этом предпочитают рукоятки удлиненных форм (цилиндрической, веретенообразной, грушевидной и др.) с плавными округлыми обводами и тщательно обработанной гладкой или рифленой поверхностью.
1.3. Обод и рукоятка маховиков и штурвалов, используемых в условиях низкой температуры окружающей среды, должны изготовляться из материалов или покрываться материалами, которые обладают низкой теплопроводностью.
1.4. Для обеспечения оптимального обзора объектов наблюдения и удобства движения ногами необходимо устанавливать только часть маховика, то есть штурвал с двумя хордами-рукоятками с вращением 90 - 120° (см. черт. 1, справочное Приложение 1).
1.5. Для одновременного выполнения нескольких управляющих действий (более чем в двух измерениях) допускается применять маховики и штурвалы в комбинации и едином конструктивном исполнении с другими типами органов управления (рычагом, кнопкой, защелкой и др.). Каждый из них должен отвечать своим специфическим эргономическим требованиям.
1.6. Маховики управления и штурвалы необходимо устанавливать на рабочем месте в пределах зоны досягаемости моторного поля оператора с учетом требований безопасности по ГОСТ 12.2.003-74. При этом часто используемые маховики и штурвалы должны устанавливаться в зоне легкой досягаемости.
1.7. Ось вращения маховика управления и штурвала при вращении его двумя руками сидя следует располагать в плоскости симметрии сиденья с отклонениями не более 50 мм.
1.8. Маховик, вращаемый одной рукой, должен устанавливаться против (на стороне) соответственно действующей (правой или левой) руки.
1.9. Направление вращения маховиков и штурвалов может осуществляться по часовой и против часовой стрелки. При этом (за исключением маховиков управления клапанами) должно быть обеспечено соответствие направления движения управляемого объекта или соответствующего указателя индикатора СЧМ направлению вращения маховика и штурвала.
1.10. Поворот маховика управления клапанами по часовой стрелке должен приводить к закрытию клапана, уменьшению параметра, а против часовой стрелки - к его открытию, увеличению параметра.
1.11. Направления быстрых вращательных движений, осуществляемых одновременно левой и правой рукой на двух маховиках, должны быть взаимно противоположными.
1.12. Маховики (за исключением рулевых маховиков и штурвалов) должны иметь хорошо видимые надписи, обозначающие их назначение, а также указатели положения, направления перемещения и его следствия, помещаемые как непосредственно на маховиках, так и рядом с ними.
1.13. Кодирование маховиков, в том числе и маховиков специального назначения (аварийных, противопожарных и пр.), а также маховиков, объединенных в функциональные группы, необходимо проводить выбором соответствующей формы, размера и цвета, а также расположением.
1.14. Конечные положения маховика и штурвала должны быть четко обозначены и при необходимости ограничены специальным стопором (упором).
1.15. Маховики, предназначенные для ступенчатых переключений, должны иметь надежную фиксацию и обозначение их промежуточных положений.
2.1. Основные размеры маховиков управления и штурвалов должны соответствовать указанным в табл. 1.
Таблица 1
Размеры, мм
Способ вращения | Обод | Рукоятка | ||||||
Диаметр наибольший | Поперечное сечение | Длина | Диаметр наибольший | |||||
Предельные значения | Оптимальные значения | Предельные значения | Оптимальные значения | Предельные значения | Оптимальные значения | Предельные значения | Оптимальные значения | |
Двумя руками за обод | 140 - 1000 | 350 - 400 <*> | 10 - 40 | 25 - 30 | - | - | - | - |
Одной рукой за обод | 50 - 140 | 75 - 80 | 10 - 25 | 15 - 20 | - | - | - | - |
Преимущественно кистью за рукоятку | 150 - 400 | 250 - 300 | - | - | 75 - 150 | 100 - 120 | 15 - 35 | 25 - 30 |
(в ред. Изменения N 1, введенного в действие Постановлением Госстандарта СССР от 30.11.1981 N 5152) | ||||||||
Преимущественно пальцами за рукоятку | 50 - 200 | 75 - 100 | - | - | 30 - 75 | 40 - 50 | 10 - 20 | 15 - 18 |
(в ред. Изменения N 1, введенного в действие Постановлением Госстандарта СССР от 30.11.1981 N 5152) | ||||||||
--------------------------------
2.2. Усилие, необходимое для вращения маховиков и штурвалов, должно соответствовать указанному в табл. 2.
Таблица 2
(таблица 2 в ред. Изменения N 1, введенного в действие
Постановлением Госстандарта СССР от 30.11.1981 N 5152)
Способ вращения | Усилие, кгс, не более | |||||
Маховики управления с рукояткой | Маховики управления и штурвалы | |||||
Частота использования, раз в смену | ||||||
Быстрое вращение с точной установкой | Более 960 | 960 - 241 | 240 - 17 | 16 - 5 | Менее 5 | |
Преимущественно пальцами и кистью | 1 | - | - | - | - | - |
Преимущественно кистью с предплечьем | 2 | 0,5 | 1 | 2 | 3 | 6 |
Всей рукой (мышцы кисти, предплечья и плеча) | 4 | 1 <***> | 2 | 3 | 4 <*> | 15 |
Двумя руками | - | 6 | 6 | 6 | 6 | 20 <**> |
--------------------------------
ИС МЕГАНОРМ: примечание. Взамен ГОСТ 12.2.009-80 Постановлением Госстандарта России от 11.02.2000 N 34-ст с 1 января 2001 года введен в действие ГОСТ 12.2.009-99. |
<*> Для металлообрабатывающих станков усилие нажатия - по ГОСТ 12.2.009-80.
<**> Усилие нажатия на маховиках ручного привода арматуры трубопровода в момент запирания запорного органа (или страгивания при открытии) не должно превышать 45 кгс.
<***> Усилие нажатия на рукоятках штурвала (рулевого колеса) подвижных гусеничных объектов с малым объемом рабочего помещения высотой менее 1000 мм не должно превышать 15 кгс без применения гидроусилителей.
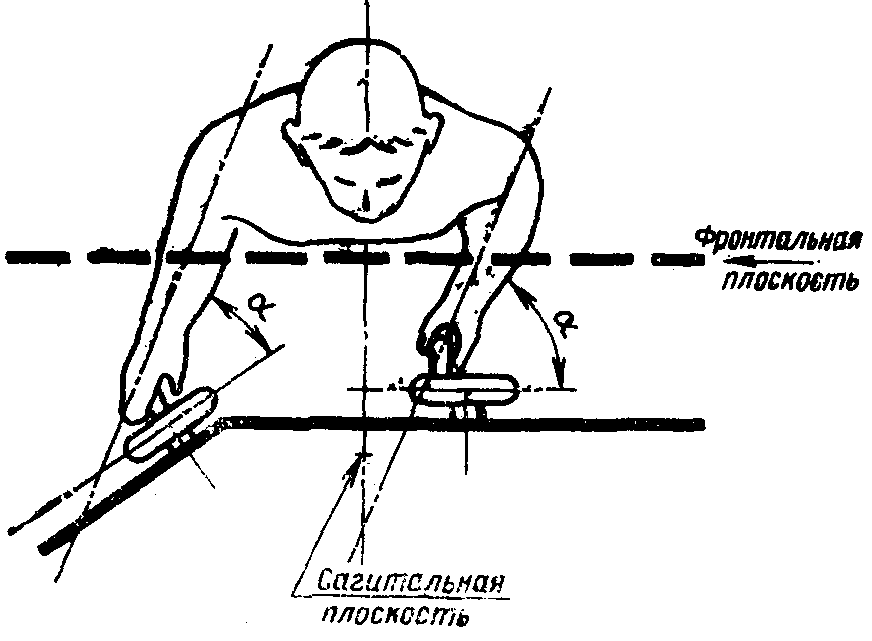
2.3. Плоскость вращения маховика, не имеющего рукоятки, и штурвала должна находиться при вращении двумя руками:
сидя - перпендикулярно продольной плоскости симметрии сиденья и под углом от 40 до 90° к горизонтали;
стоя - под углом от 0 до 90° к горизонтали с осью вращения в сагиттальной плоскости тела оператора (см. черт. 2, справочное Приложение 1).
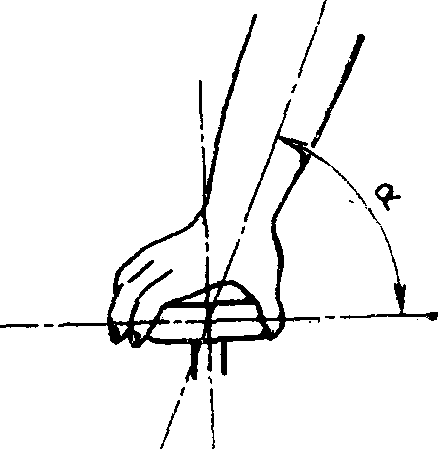
2.4. Плоскость вращения маховика без рукоятки, вращаемого одной рукой как сидя, так и стоя, должна находиться под углом от 10 до 60° по отношению к предплечью соответственно действующей (правой или левой) руки (см. черт. 3, справочное Приложение 1).
2.5. Плоскость вращения маховика, снабженного рукояткой, должна находиться по отношению к предплечью соответственно действующей (правой или левой) руки под углом:
от 10 до 90° - при вращении кистью с предплечьем и
от 10 до 45° - при вращении всей рукой (см. черт. 2, справочное Приложение 1).
2.6. Угол поворота маховиков и штурвалов, вращаемых постоянно двумя руками без их отрыва, должен быть не более 120°, а в оптимальном варианте - не более 90°.
2.7. Интервал между ободами и другими деталями соседних маховиков, расположенных в одной плоскости, должен быть не менее:
50 мм - при вращении одной рукой последовательно или в случайном порядке;
100 мм - при вращении двумя руками одновременно;
130 мм - при работе в рукавицах или перчатках.
Справочное
Справочное
Термин | Определение |
Маховик управления | Орган управления, имеющий форму колеса, со спицами или без спиц, диаметром более 50 мм, вращаемый одной или двумя руками вокруг перпендикулярной к плоскости вращения оси с целью передачи управляющих воздействий от человека к машине в системе человек-машина |
Штурвал | Вид маховика управления (часть его, сектор маховика управления), применяемого для изменения направления движения объекта на суше, на воде, в воде и в воздухе |
Рулевое колесо | Вид маховика управления, применяемого для изменения направления движения объекта на суше, на воде, в воде и в воздухе |