ГОСТ Р 51794-2001
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Аппаратура радионавигационная глобальной
навигационной
спутниковой системы и глобальной
системы позиционирования
СИСТЕМЫ КООРДИНАТ
Методы
преобразований координат
определяемых точек
ГОССТАНДАРТ РОССИИ
Москва
Предисловие
1 РАЗРАБОТАН 29-м Научно-исследовательским институтом Министерства обороны Российской Федерации
ВНЕСЕН Техническим комитетом № 363 «Радионавигация»
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 9 августа 2001 г. № 327-ст
3 ВВЕДЕН ВПЕРВЫЕ
СОДЕРЖАНИЕ
|
4 Методы преобразований координат определяемых точек. 3 Приложение Б Элементы трансформирования между системой координат ПЗ и системой координат МГС.. 9 |
ГОСТ Р 51794-2001
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Аппаратура радионавигационная
глобальной навигационной спутниковой системы
и глобальной системы позиционирования
СИСТЕМЫ КООРДИНАТ
Методы преобразований координат определяемых точек
Radionavigational equipment of global
navigation satellite system and global
position system.
Coordinate
systems. Methods of transformations for determinated points coordinates
Дата введения 2002-07-01
1 Область применения
Настоящий стандарт устанавливает: системы координат, входящие в состав систем геодезических параметров «Параметры Земли», «Мировая геодезическая система» и координатной основы Российской Федерации; методы преобразований координат и их приращений из одной системы в другую, а также порядок использования численных значений элементов трансформирования систем координат при выполнении геодезических, навигационных, картографических работ с использованием аппаратуры потребителей радионавигационных систем ГЛОНАСС и ГСП.
2 Определения и сокращения
2.1 В настоящем стандарте применяют следующие термины с соответствующими определениями:
2.1.1 большая полуось эллипсоида: Параметр, характеризующий размер эллипсоида.
2.1.2 сжатие эллипсоида: Параметр, характеризующий фигуру эллипсоида.
2.1.3 элементы трансформирования систем координат: Параметры, с помощью которых выполняется преобразование координат из одной системы в другую.
2.2 В настоящем стандарте применяют следующие сокращения:
ПЗ - система геодезических параметров «Параметры Земли»;
МГС - система геодезических параметров «Мировая геодезическая система»;
КНС - космическая навигационная система;
ГЛОНАСС - глобальная навигационная спутниковая система;
ГСП - глобальная система позиционирования;
ГГС - государственная геодезическая сеть;
ОЗЭ - общеземной эллипсоид;
ГПЗ - гравитационное поле Земли;
X, Y, Z - оси пространственной прямоугольной системы координат;
аПЗ - большая полуось общеземного эллипсоида в системе ПЗ;
аМГС - большая полуось общеземного эллипсоида в системе МГС;
аКр - большая полуось эллипсоида Красовского;
aПЗ - сжатие общеземного эллипсоида в системе ПЗ;
aМГС - сжатие общеземного эллипсоида в системе МГС;
aКр - сжатие эллипсоида Красовского.
3 Системы координат
3.1 Система геодезических параметров «Параметры Земли»
Система ПЗ включает в себя: фундаментальные геодезические постоянные, параметры ОЗЭ, систему координат ПЗ, закрепляемую координатами пунктов космической геодезической сети, характеристики модели ГПЗ и элементы трансформирования между системой координат ПЗ и национальными референцными системами России, приведенные в приложении А.
Теоретическое определение системы координат ПЗ основывается на следующих положениях:
а) начало системы координат расположено в центре масс Земли;
б) ось Z направлена в Международное условное начало;
в) ось X лежит в плоскости начального астрономического меридиана, установленного Международным бюро времени;
г) ось Y дополняет систему до правой.
Положения точек в системе ПЗ могут быть получены в виде пространственных прямоугольных или геодезических координат.
Геодезические координаты относятся к ОЗЭ, размеры которого определяются значениями большой полуоси аПЗ = 6378136 м и сжатия aПЗ = 1/298,25784.
Центр ОЗЭ совпадает с началом системы координат ПЗ, ось вращения эллипсоида - с осью Z, а плоскость начального меридиана - с плоскостью XOZ.
3.2 Система геодезических параметров «Мировая Геодезическая Система»
Система параметров МГС включает в себя: фундаментальные геодезические постоянные, систему координат МГС, закрепляемую координатами пунктов космической геодезической сети, параметры ОЗЭ, характеристики модели ГПЗ, элементы трансформирования между геоцентрической системой координат МГС и различными национальными системами координат.
Численные значения элементов трансформирования между системой координат ПЗ и системой координат МГС, а также порядок использования элементов трансформирования приведены в приложении Б.
Теоретическое определение системы координат МГС основывается на положениях, аналогичных определению системы координат ПЗ, приведенных в 3.1.
Положения точек в системе МГС могут быть получены в виде пространственных прямоугольных или геодезических координат.
Геодезические координаты относятся к ОЗЭ, размеры которого определяются значениями большой полуоси аМГС = 6378137 м и сжатия aМГС = 1/298,257223563.
Центр эллипсоида совпадает с началом системы координат МГС, ось вращения эллипсоида совпадает с осью Z, а плоскость начального меридиана - с плоскостью XOZ.
3.3 Координатная основа Российской Федерации
Координатная основа Российской Федерации представлена референцной системой координат, реализованной в виде ГГС, закрепляющей систему координат на территории страны, и государственной нивелирной сети, распространяющей на всю территорию страны систему нормальных высот (Балтийская система), исходным началом которой является нуль Кронштадтского футштока.
Положения определяемых точек относительно координатной основы могут быть получены в виде пространственных прямоугольных или геодезических координат либо в виде плоских прямоугольных координат и высот.
За отсчетную поверхность в референцной системе координат РФ принят эллипсоид Красовского с большой полуосью аКр = 6378245 м и сжатием aКр = 1/298,3.
Центр эллипсоида Красовского совпадает с началом референцной системы координат, ось вращения эллипсоида параллельна оси вращения Земли, а плоскость нулевого меридиана определяет положение начала счета долгот.
4 Методы преобразований координат определяемых точек
4.1 Преобразование прямоугольных пространственных координат в геодезические и обратно
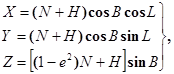
Преобразование прямоугольных пространственных координат в геодезические осуществляют по формулам:
 (1)
(1)
где X, Y, Z - прямоугольные координаты точки;
В, L, Н - геодезические координаты точки (соответственно широта и долгота, рад, и высота, м);
N - радиус кривизны первого вертикала, м;
е - эксцентриситет эллипсоида.
Значения радиуса кривизны первого вертикала и квадрата эксцентриситета эллипсоида вычисляют соответственно по формулам:
![]() (2)
(2)
![]() (3)
(3)
где а - большая полуось эллипсоида, м;
a - сжатие эллипсоида.
Для преобразования пространственных прямоугольных координат в геодезические необходимо проведение итераций при вычислении геодезической широты и геодезической высоты.
Для этого используют следующий алгоритм:
1) вычисляют вспомогательную величину D по формуле
![]() (4)
(4)
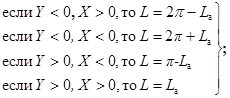
2) анализируют значение D следующим образом:
а) если D = 0, то
![]() (5)
(5)
L = 0,
![]() (6)
(6)
б) если D > 0, то
![]() (7)
(7)
при этом
 (8)
(8)
3) анализируют значение Z:
а) если Z = 0, то
В = 0; H = D - а; (9)
б) во всех других случаях вычисления выполняют следующим образом:
- находят вспомогательные величины r, с, р по формулам:
![]() (10)
(10)
![]() (11)
(11)
![]() (12)
(12)
- реализуют итеративный процесс:
s1 = 0, (13)
b = c + s1, (14)
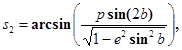 (15)
(15)
![]() (16)
(16)
если модуль разности d, определяемый по формуле (16), меньше установленного значения, то
В = b, (17)
![]() (18)
(18)
Если модуль разности d равен или больше установленного значения, то
s1 = s2 (19)
и вычисления повторяют, начиная с формулы (14).
При преобразованиях координат в качестве допуска прекращения итеративного процесса принимают значение 0,0001". В этом случае погрешность вычисления геодезической высоты не превышает 0,003 м.
4.2 Преобразование координат
Пользователям КНС ГЛОНАСС и ГСП необходимо выполнять преобразования координат из ПЗ в систему МГС и обратно, а также из ПЗ и МГС в референцную систему координат Российской Федерации. Указанные преобразования координат выполняют, используя семь элементов трансформирования, точность которых определяет точность преобразований.
Элементы трансформирования между системами координат ПЗ и МГС приведены в приложении Б.
Преобразование координат из системы МГС в координаты референцной системы Российской Федерации осуществляют последовательным преобразованием координат сначала в систему ПЗ, а затем - в координаты референцной системы.
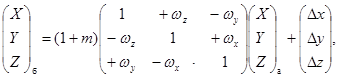
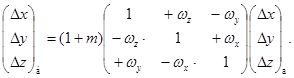
Преобразование пространственных прямоугольных координат выполняют по формуле
 (20)
(20)
где Dх, Dу, Dz - линейные элементы трансформирования, м;
ωx, ωy, ωz - угловые элементы трансформирования, рад;
т - дифференциальное различие масштабов систем координат;
а, б - системы координат.
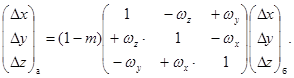
Обратное преобразование прямоугольных координат выполняют по формуле
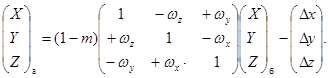 (21)
(21)
Прямое и обратное перевычисление геодезических координат выполняют по формулам:
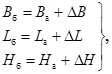 (22)
(22)
где B, L, H - геодезические широта и долгота, выраженные в единицах плоского угла, и высота, м;
DB, DL, DH - поправки к геодезическим координатам точки;
а, б - системы координат.
Поправки к геодезическим координатам определяют по следующим формулам:
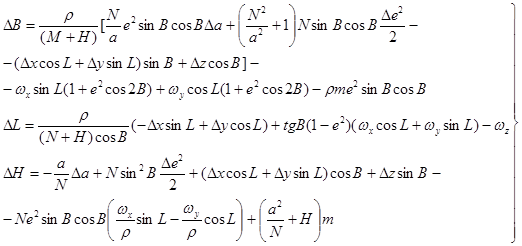 (23)
(23)
где DB, DL, DH - поправки к геодезическим широте, долготе, …", и поправка к высоте, м;
B, L, H - геодезические широта, долгота, рад, и высота, м;
Dх, Dу, Dz - линейные элементы трансформирования системы координат а относительно системы координат б, м;
ωx ωy ωz - угловые элементы трансформирования системы координат а относительно системы координат б, …";
т - дифференциальное различие масштабов систем координат б и а;
а, б - системы координат
Dа = аб - aа;
De2 = eб2 - еа2;
![]()
![]()
М - радиус кривизны меридианного сечения (М = а(1 - е2)(1 - е2 sin2В)-3/2);
N - радиус кривизны первого вертикала (N = а(1 - е2 sin2B)-1/2);
аб, аа - большие полуоси эллипсоидов в системах координат б и а соответственно;
еб2, еа2 - квадраты эксцентриситетов эллипсоидов в системах координат б и а соответственно;
ρ - число угловых секунд в 1 радиане (ρ = 206264,8062").
При преобразовании из системы а в систему б используют значения геодезических координат в системе а, а при обратном переходе - в системе б.
Формулы (23) обеспечивают вычисление поправок к геодезическим координатам с погрешностью, не превышающей 0,3 м (в линейной мере), а для достижения погрешности не более 0,001 м выполняют вторую итерацию, то есть учитывают значения поправок к геодезическим координатам по формулам (22) и повторно выполняют вычисления по формулам (23). При этом
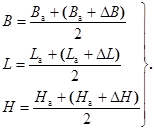 (24)
(24)
4.3 Преобразование геодезических координат в плоские прямоугольные координаты и обратно
Для получения плоских прямоугольных координат в принятой на территории Российской Федерации проекции Гаусса - Крюгера используют геодезические координаты на эллипсоиде Красовского.
Преобразование геодезических координат из систем ПЗ и МГС в геодезические координаты на эллипсоиде Красовского осуществляют по формулам (22), (23). Плоские прямоугольные координаты с погрешностью не более 0,001 м вычисляют по формулам:
 (25)
(25)
 (26)
(26)
где х, у - плоские прямоугольные координаты определяемой точки в проекции Гаусса - Крюгера, м;
В - геодезическая широта определяемой точки, рад;
l - расстояние от определяемой точки до осевого меридиана зоны, рад, вычисляемое по формуле
l = {L - [3 + 6(n - 1)]}/57,29577951; (27)
L - геодезическая долгота определяемой точки, …;
n - номер шестиградусной зоны в проекции Гаусса - Крюгера, вычисляемый по формуле
n = E[(6 + L)/6], (28)
E[…] - целая часть выражения, заключенного в квадратные скобки.
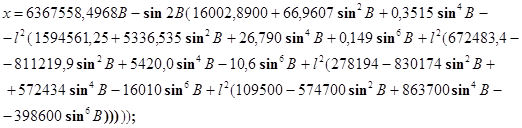
Преобразование прямоугольных координат проекции Гаусса - Крюгера на эллипсоиде Красовского в геодезические координаты осуществляют по формулам:
В = В0 + DB; (29)
L = 6(n - 0,5)/57,29577951 + l, (30)
где В, L - геодезические широта и долгота определяемой точки, рад;
B0 - геодезическая широта точки, абцисса которой равна абциссе х определяемой точки, а ордината равна нулю, рад;
п - целая часть числа, вычисляемого по формуле
n = E[y 10-6], (31)
E[…] - целая часть выражения, стоящего в квадратных скобках;
у - ордината определяемой точки в проекции Гаусса - Крюгера, м;
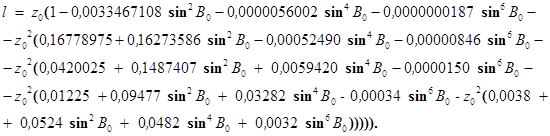
b - вспомогательная величина, вычисляемая по формуле
b = х/6367558,4968; (32)
х - абцисса определяемой точки, в проекции Гаусса - Крюгера, м;
z0 - вспомогательная величина, вычисляемая по формуле
z0 = (y - (10n + 5)105)/6378245 cosB0. (33)
Далее вычисления геодезических координат определяемой точки выполняют по следующим формулам:
В0 = (b + sin2b (0,00252588685 - 0,00001491860 sin2b + 0,00000011904 sin4b); (34)
 (35)
(35)
 (36)
(36)
4.4 Преобразование приращений координат из системы в систему
Преобразование приращений пространственных координат из системы координат а в систему б осуществляют по формуле
 (37)
(37)
Обратное преобразование приращений пространственных координат из системы б в систему а выполняют по формуле
 (38)
(38)
В формулах (37) и (38) угловые элементы трансформирования ωx, ωy, ωz выражены в радианах.
4.5 Связь между различными системами высот
Геодезическая и нормальная высоты связаны соотношением:
H = Hg + ζ, (39)
где H - геодезическая высота определяемой точки, м;
Hg - нормальная высота определяемой точки, м;
ζ - высота квазигеоида в определяемой точке, м.
Высоты квазигеоида над отсчетным эллипсоидом систем геодезических параметров ПЗ и МГС вычисляют по моделям ГПЗ, являющимся составной частью систем геодезических параметров.
Высоты квазигеоида над ОЗЭ и эллипсоидом Красовского связаны соотношением
ζОЗЭ = ζКр + DH (40)
где ζОЗЭ - высота квазигеоида над ОЗЭ, м;
ζКр - высота квазигеоида над эллипсоидом Красовского, м;
DH - поправка к геодезической высоте, м, вычисляемая по формуле (23).
ПРИЛОЖЕНИЕ
А
(обязательное)
Элементы трансформирования между системой координат ПЗ и
национальными
референцными системами России
Преобразование координат из референцной Системы координат
1942 года в
систему ПЗ-90
Dх = (+25 ± 2) м; ωx = 0,00" ± 0,1";
Dу = (-141 ± 2) м; ωу = -0,35" ± 0,1";
Dz = (-80 ± 3) м; ωz = -0,66" ± 0,1";
m = (0,00 ± 0,25)10-6;

Преобразование координат из системы
координат ПЗ-90
в референцную
Систему координат 1942
года

Преобразование координат из референцной Системы координат 1995 года в систему ПЗ-90
Dх = +25,90 м;
Dу = -130,94 м;
Dz = -81,76 м;
Преобразование координат из системы
координат ПЗ-90
в референцную
Систему координат 1995 года
ПРИЛОЖЕНИЕ
Б
(обязательное)
Элементы трансформирования между системой координат ПЗ и системой координат МГС
Преобразование координат из системы координат ПЗ-90 в систему МГС-84
Dх = (-1,08 ± 2) м; ωx = 0;
Dу = (-0,27 ± 0,2) м; ωу = 0;
Dz = (-0,90 ± 0,3) м; ωz = -0,16" ± 0,01";
m = (-0,12 ± 0,06)·10-6;

Преобразование координат из системы координат МГС-84 в систему ПЗ-90

Ключевые слова: аппаратура приемная глобальной навигационной спутниковой системы и глобальной системы позиционирования, системы координат, определение координат местоположения