ГЛАВНОЕ УПРАВЛЕНИЕ ГЕОДЕЗИИ И КАРТОГРАФИИ
при СОВЕТЕ МИНИСТРОВ СССР
ГЕОДЕЗИЧЕСКИЕ И КАРТОГРАФИЧЕСКИЕ ИНСТРУКЦИИ,
НОРМЫ И ПРАВИЛА
РУКОВОДЯЩИЙ
ТЕХНИЧЕСКИЙ МАТЕРИАЛ
Редукционно-полярный метод
измерений
при крупномасштабном картографировании
местности
Обязателен для
предприятий и организаций
Главного управления геодезии и картографии
при Совете Министров СССР
Утвержден ГУГК 12
ноября 1979 г.
и введен в действие с 1 марта 1980 г.
Москва 1980
РАЗРАБОТАН Научно-исследовательским институтом прикладной геодезии (НИИПГ)
Директор И.Т. АНТИПОВ
Зав. отделом Д.В. ЛИСИЦКИЙ
Руководитель темы Д.В. ЛИСИЦКИЙ
Исполнители А.П. ИВАНОВ, В.В. ИЗОСИМОВ, А.И. МАКАРОВ, А.А. ГАБРАТ
ВНЕСЕН Научно-исследовательским институтом прикладной геодезии
Директор И.Т. АНТИПОВ
ПОДГОТОВЛЕН К УТВЕРЖДЕНИЮ Техническим управлением ГУГК
Начальник управления В.А. БРЕВНОВ
Начальник отдела Б.Н. НЕЙМАН
Ст. инженер Н.М. ВОРОНКОВ
УТВЕРЖДЕН Главным управлением геодезии и картографии при Совете Министров СССР
Начальник ГУГК И.А. КУТУЗОВ
ВВЕДЕН В ДЕЙСТВИЕ Приказом ГУГК
от «12» ноября 1979 года № 478п
Настоящий руководящий технический материал «Редукционно-полярный метод измерений при крупномасштабном картографировании местности» составлен в развитие «Инструкции по топографической съемке в масштабах 1:5000, 1:2000, 1:1000, 1:500» М. 1973 и устанавливает требования к методике выполнения работ, оформлению полевых и камеральных материалов.
В РТМ изложены геометрическая сущность редукционно-полярного метода измерений при крупномасштабном картографировании местности, его технико-эксплуатационная характеристика, методика полевых и камеральных работ с применением светодальномера, теодолита, ЭВМ и автоматического координатографа.
1. СОДЕРЖАНИЕ РЕДУКЦИОННО-ПОЛЯРНОГО МЕТОДА
1.1. Геометрическая сущность метода
Геометрический принцип производства измерений редукционно-полярным методом иллюстрируется рисунком 1.1 и заключается в следующем:
- внецентренное измерение расстояний светодальномером с последующим редуцированием их на измеренные теодолитом направления;
- для редукции расстояний используются элементы, определяющие положение центра светодальномера относительно точки съемочного обоснования, на которой устанавливается теодолит.
На рис. 1.1 обозначения следующие:
Т - центр теодолита, устанавливаемого над съемочной точкой (под центром теодолита подразумевается точка пересечения вертикальной оси вращения теодолита с горизонтальной осью вращения зрительной трубы и визирной осью зрительной трубы);
С - центр светодальномера (точка пересечения вертикальной оси вращения светодальномера с горизонтальной осью вращения приемопередатчика и оптической осью приемо-визирной системы);
N - направление на точку ориентирования;
P - центр отражателя, устанавливаемого над определяемой точкой;
l - расстояние между центрами теодолита и светодальномера;
Sc - измеренное дальномером наклонное расстояние до определяемой точки;
D - горизонтальный угол между ориентирным направлением и направлением на определяемую точку;
Sт - наклонное расстояние между центром теодолита и центром отражателя.
В точке Т измеряют вертикальные углы b1 и b2 на центр отражателя и центр светодальномера соответственно, горизонтальный угол α между направлениями на светодальномер и определяемую точку.
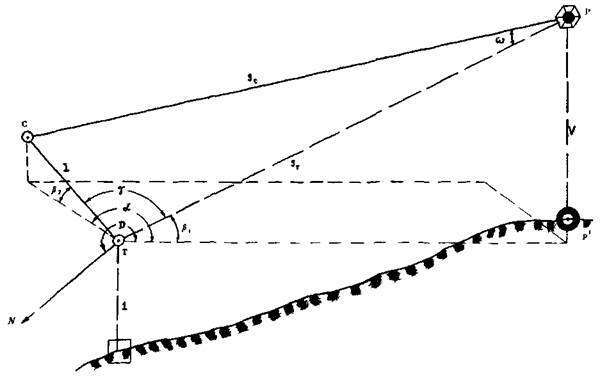
Рис. 1.1. Геометрический принцип редукционно-полярного метода
Измеренные наклонные расстояния (sc) в соответствии с принятыми обозначениями редуцируют к центру теодолита (Т) по формуле
где
cosγ = cosβ1 · cosβ2 · cosα + sinβ1 · sinβ2. (1.2)
Здесь γ - пространственный угол в плоскости треугольника ТСР между направлениями на определяемую точку и светодальномер.
Приращения координат X, Y, H определяемых точек относительно съемочной точки Т вычисляют по следующим формулам:
ΔX = ST · cos(D + D') · cosβ1;
ΔY = ST · sin(D + D') · cosβ1; (1.3)
ΔH = ST · sinβ1,
где D' - дирекционный угол ориентирного направления.
В результате вычислений получают каталог координат определяемых точек по формулам:
X = XT + ΔX;
Y = YT + ΔY; (1.4)
Н = НT + Δh + i - V,
где i - высота центра теодолита над точкой стояния;
V - высота центра отражателя над определяемой точкой.
Из геометрической сущности метода следует, что величина измеряемого расстояния (Sc) для обеспечения нормативной точности редуцирования по формуле 1.1 должна быть не менее 1,25 от величины линейного элемента редукции
в противном случае необходимо изменить расположение светодальномера относительно теодолита или расстояние между ними.
1.2. Применяемые инструменты и оборудование
Комплекс технических средств, обеспечивающий реализацию редукционно-полярного метода, включает следующие измерительные приборы и вспомогательное оборудование:
- оптический теодолит (типа Т2, Т5К, Т15);
- малый топографический светодальномер (типа ЕОК-2000, 2СМ-2);
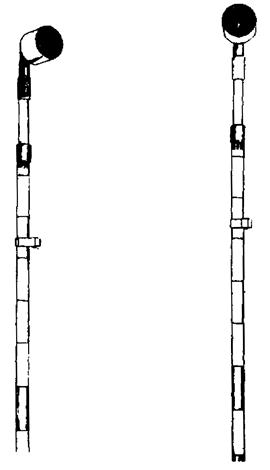
- визирную цель в виде раздвижной вехи с призменным отражателем, которая позволяет устанавливать необходимую для измерений высоту отражателя;
- рулетку (РС-10);
- портативные средства связи с диапазоном действия не менее 500 м (радиостанции типа «Муха», «Ласточка», «Виталка» и др.);
- прибор для измерения метеоданных (баротермогигрометр);
- устройства для составления планов вручную по полярным координатам (измеритель, транспортир, хордоугломер) или прямоугольным координатам (например, прецизионный координатограф ПК-1);
- ЭВМ (типа «Наири», М-20), ЕС ЭВМ или мини-ЭВМ (типа «Электроника 15 ВСМ5»);
- автоматический координатограф, графопостроитель (типа Картимат III, ГДР; ЕС 7054, ЧССР).
При выборе инструмента для работы предпочтение отдается оптическим теодолитам с компенсатором при вертикальном круге инструмента и светодальномерам с цифровой индикацией измеренного расстояния. Наиболее удобными в работе являются светодальномеры типа ЕОК-2000, 2СМ-2, которые обеспечивают высокую надежность и точность получаемых результатов. Выбирая конструкцию визирной цели, необходимо помнить, что она должна обеспечить требуемую точность установки над определяемой точкой, возможность изменения высоты отражателя и быть достаточно удобной в эксплуатации.
1.3. Составление проекта производства работ
Технический проект для выполнения крупномасштабной съемки составляется в соответствии с «Инструкцией о порядке составления технических проектов и смет на производство общегосударственных топографо-геодезических работ» издания 1967 г.
Технический проект является тем исходным документом, где указывается назначение работ, определяются технические условия, технология, качество выполнения работ, разрабатываются организационно-технические мероприятия по технике безопасности и охране труда, приводятся расчеты материалов и трудовых ресурсов.
Вначале проектируют плановые сети, а затем высотные с таким расчетом, чтобы по возможности все плановые пункты были включены в высотную сеть.
Работа по составлению проекта планово-высотных сетей выполняется в такой последовательности:
- сбор, изучение и систематизация сведений и материалов о ранее выполненных геодезических работах;
- полевое обследование района работ;
- составление проекта;
- рекогносцировка запроектированных точек съемочных геодезических сетей.
Проектирование съемочных геодезических сетей для крупномасштабных топографических съемок должно производиться с учетом масштаба и метода предстоящих съемок.
Суммарная плотность пунктов государственных геодезических сетей всех классов и геодезических сетей местного значения на территории, для которой развивается съемочная геодезическая сеть редукционно-полярным методом, должна быть не менее 1 пункта на 1 км2.
В противном случае необходимо произвести сгущение государственной геодезической сети развитием государственных геодезических сетей 4 класса и геодезических сетей 1, 2 разрядов до плотности, позволяющей вести развитие съемочной геодезической сети редукционно-полярным методом.
Плотность, превышающая 9 пунктов на квадратный километр, в большинстве случаев позволяет производить съемочные работы редукционно-полярным методом непосредственно с этих пунктов.
Количество точек съемочной геодезической сети на застроенной территории определяется в процессе рекогносцировки.
Для подбора типа инструментов в зависимости от вида работ можно воспользоваться следующими эмпирическими формулами:
Т = целая часть от (![]() ),
),
где Rmax - максимально возможный радиус работ (км);
m - допустимая средняя квадратическая погрешность положения определяемой точки относительно исходной (см);
Т - цифровой индекс теодолита по ГОСТ 10529-70;
ms - средняя квадратическая погрешность измерения линий или цифровой индекс типа светодальномера по ГОСТ 19223-73 (см).
Рассмотрим расчет типа инструментов на примере, принимая максимально возможный радиус работ Rmax = 1000 м.
Известно, что предельные погрешности положения пунктов уравненного планового обоснования относительно пунктов государственной геодезической сети на застроенной территории не должны превышать 0,2 мм в масштабе плана, что для масштаба 1:500 составляет Δпред. = 10 см.
На практике, учитывая ограниченное число измерений, принимают Δпред. = 2m (где m - средняя квадратическая погрешность положения определяемой точки относительно исходной). Принимая m = 5 см и подставив это значение в формулы (1.6), получим
ms ≤ 0,5 · 5 см;
ms £ 2,5 см,
следовательно, для данного метода работ достаточно иметь светодальномер с погрешностью измерения линий ± 2 см (ЕОК-2000 или 2СМ-2).
Для определения типа теодолита подставим значения в выражение (1.6)
![]()
получим индекс 2, что соответствует теодолиту типа Т2.
Для определения погрешности установки отражателя над определяемой точкой воспользуемся выражением
при m = 5 см получим mo = 1,2,
где mо - предельная погрешность установки отражателя над определяемой точкой.
Следовательно, отражатель достаточно устанавливать над точкой с погрешностью 1 см.
1.4. Организация полевых работ
Развитие съемочных геодезических сетей и координирование постоянных предметов местности редукционно-полярным методом выполняются бригадой в составе 4-х человек:
- наблюдатель у теодолита;
- наблюдатель у светодальномера;
- помощник, ведущий запись результатов измерений;
- рабочий у визирной цели.
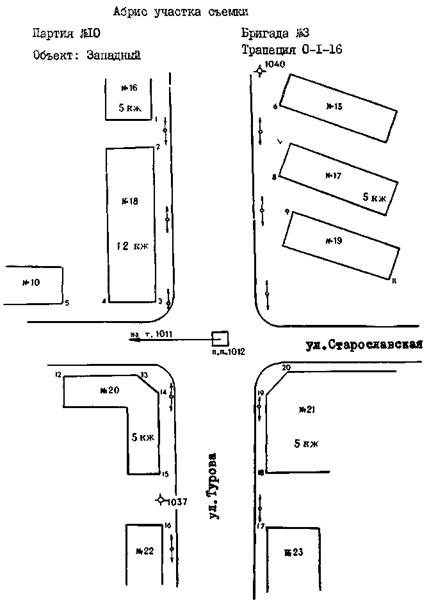
Перед началом работ производят рекогносцировку местности, в процессе которой определяют местоположение точек и порядок их набора, составляют предварительный абрис в двух экземплярах (приложение 1). Один экземпляр абриса передают рабочему, а второй находится у ответственного исполнителя. Ответственный исполнитель в процессе съемки координирует действия бригады, измеряет горизонтальные и вертикальные углы на все определяемые точки, уточняет в процессе съемки составленный ранее абрис, ведет нумерацию точек.
Работа наблюдателя у светодальномера заключается в измерении наклонной дальности до каждой определяемой точки. Помощник записывает результаты измерений в журнал специальной формы (см. приложения 2, 3) и снимает показания приборов о метеоусловиях.
Рабочий поочередно устанавливает визирную цель на определяемые точки и сообщает по рации дополнительные подробности, необходимые для уточнения абриса и производства измерений.
Работу на станции начинают с установки теодолита, измерения высоты инструмента и ориентирования его по начальному направлению. Светодальномер устанавливают рядом с теодолитом в удобном для наблюдений месте. Измерения начинают с определения углового и линейного элементов редукции. Величина линейного элемента редукции измеряется светодальномером на отражатель, установленный в подставку теодолита, или рулеткой между центрами подставок инструментов с точностью не ниже 1 см. Температура измеряется с точностью до 1 °С, атмосферное давление до 1 мм рт. ст.
Расстояния и направления до определяемых точек измеряются в намеченной последовательности и по методике, которая устанавливается в зависимости от вида выполняемых топографо-геодезических работ.
После того как набор съемочных точек на объекте закончен, производят съемку подробностей методами полуавтоматического картирования и горизонтальной съемки.
2. ПРОИЗВОДСТВО ПОЛЕВЫХ РАБОТ
2.1. Развитие съемочной геодезической сети
Съемочная геодезическая сеть для определения координат углов капитальных зданий и сооружений, центров люков колодцев подземных коммуникаций и съемки подробностей редукционно-полярным методом развивается от пунктов государственных геодезических сетей, геодезических сетей местного значения методами триангуляции, трилатерации, полигонометрии и редукционно-полярным методом.
Описание методики производства работ и соответствующие допуски на традиционные технологии создания съемочной геодезической сети изложены в «Инструкции по топографической съемке в масштабах 1:5000, 1:2000, 1:1000, 1:500», М., 1973.
При развитии съемочной геодезической сети редукционно-полярным методом определяется только плановое положение точек. Определение высотного положения точек производится ходами технического нивелирования, однако допускается в районах с пересеченным рельефом высотное положение пунктов определять из тригонометрического нивелирования редукционно-полярным методом.
Для определения положения пунктов съемочного геодезического обоснования предлагаемым методом рекомендуются следующие схемы геодезических построений (рис. 2.1):

Рис. 2.1. Схемы геодезических построений для определения положения пунктов съемочной геодезической сети
В случае использования схемы (а) положение точки 1 определяется с пунктов А и В. За окончательное значение координат принимается среднее из двух полученных значений. Схема (б) определяет положение каждой точки один раз. Между точками 1, 2, 3 производится контрольный промер. Величина расстояния (Sk) должна быть не более 500 м. Средняя квадратическая погрешность измерения не более чем принятая погрешность измерения линий в сети.
Промер контрольных расстояний удобнее производить одновременно со съемочными работами. Для схемы (а) предельно допустимые расхождения в координатах и в длинах вычисленных и измеренных контрольных линий не должны превышать ± 0,2 мм в масштабе создаваемого плана. Если величина расхождения превышает допустимую, то производятся повторные контрольные промеры расстояния до ближайших соседних точек, при помощи которых определяется точка, имеющая погрешность, и при необходимости измерения для определения положения этой точки повторяют, в противном случае точку считают непригодной.
Полевые работы по развитию съемочной геодезической сети выполняют в следующей последовательности:
Производят рекогносцировку местности, в процессе которой уточняют местоположение запроектированных точек сети с точки зрения удобства дальнейшего производства съемочных работ, проверяют условия видимости и намечают места контрольных промеров расстояний между точками. Между исходным пунктом и определяемыми точками, а также между точками развиваемой сети, где намечены промеры контрольных расстояний, должна быть обеспечена хорошая видимость. Визирный луч теодолита и светодальномера должен проходить не ближе 0,5 метра от поверхности земли или местных предметов.
Места, выбранные для закрепления точек, должны гарантировать их надежную сохранность на период проведения съемочных работ на данном объекте. Каждая закрепленная точка привязывается линейными промерами не менее чем к трем постоянным предметам местности или твердым контурам. Схемы привязки заносятся на абрис, содержащий проект сети. Точки сети закрепляются временными знаками в соответствии с существующими инструкциями и наставлениями.
Устанавливают на пункте инструменты и оборудование. Теодолит центрируют с погрешностью, определяемой по формуле (1.7). На пункте с длиной визирного луча ориентирного направления, не превышающего радиус съемки Rmax = 1000 м, погрешность центрирования рассчитывается так, чтобы угловая погрешность ориентирования, вызванная ошибкой центрирования, была в два раза меньше погрешности угловых измерений. Высота центра теодолита над пунктом измеряется с точностью ± 1 см.
Светодальномер устанавливают в удобном для наблюдений месте на расстоянии, не превышающем оптимальную дистанцию взаимодействия наблюдателей (2 - 10 м). Особое внимание надо уделять надежной установке штативов, т.к. в процессе измерений необходимо строго соблюдать неподвижность положения центров инструментов. Для исключения случаев случайного изменения положения светодальномера проекцию центра закрепляют временным знаком.
Измеряют элементы приведения и регистрируют данные метеоусловий.
Горизонтальное направление на центр светодальномера (в данном случае на отвес) достаточно измерить от направления ориентирования теодолита при одном круге с предельной погрешностью 30". Затем определяют МО вертикального круга и измеряют вертикальный угол на проекцию центра светодальномера, которую предварительно выносят и обозначают на боковой стойке светодальномера.
Измеряют горизонтальные и вертикальные углы, наклонные дальности на определяемые точки съемочной геодезической сети. Горизонтальные углы определяют способом измерения отдельного угла одним приемом с перестановкой лимба между полуприемами на величину ≈ 90°. Расхождение значений угла, полученное из двух полуприемов, не должно превышать величины 2mα (где mα - средняя квадратическая погрешность измерения угла одним приемом, которая определяется величиной Т по формуле (1.6).
Измерение вертикального угла, если точки съемочной геодезической сети определяются по высоте из ходов технического нивелирования, необходимо производить однократно при одном и том же положении круга, что и все предыдущие измерения на станции. В случае определения высот точек редукционно-полярным методом отсчет по вертикальному кругу снимается при двух наведениях на определяемую точку. Расхождение значений угла Δβ" (в секундах) не должно превышать величину, определяемую по формуле
где Δh - предельная погрешность определения высот точек, не превышающая 0,2 от высоты сечения рельефа (м);
S - расстояние до определяемой точки (м);
ρ" = 206265.
За окончательное значение вертикального угла принимается среднее из двух наведений.
Измерение расстояний светодальномером производят однократно по сокращенной программе.
Порядок работы при измерении расстояний светодальномером ЕОК-2000 заключается в следующем:
- перед началом всех измерений, а также по их окончании производят проверку электрических параметров светодальномера и источника питания в соответствии с инструкцией по эксплуатации прибора;
- измерение расстояния производят при одной калибровке (обнулении) счетчика на линии оптического короткого замыкания (ОКЗ). На частоте f1 берут три отсчета R1, за окончательный результат принимают среднее значение. Расхождения в отсчетах R1 не должны превышать двух делений шкалы счетчика;
- после снятия последнего отсчета R1 счетчик обнуляют и производят отсчеты R2 и R3 на частотах f2 и f3;
- количество недостающих фазовых циклов легко определяется на глаз и фиксируется в журнале.
Порядок работы при измерении расстояний светодальномером 2СМ-2 заключается в следующем:
- перед началом всех измерений, а также в процессе работ производят проверку работоспособности источников питания, термостата, фильтра сигнального канала, счетного блока и контроль нулевых отсчетов;
- измерение расстояния производят одним приемом, делая по 2 одиночных отсчета на дистанции и на линии оптического короткого замыкания. Полный отсчет измерения дистанции и ОКЗ получают, используя среднее значение из отсчетов в приеме;
- результат измерения получают как разность средних отсчетов дистанции и ОКЗ;
- показания табло являются результатом измерения расстояний на трех частотах с разрешенной неоднозначностью до 1 км, что исключает определение фазовых циклов на глаз при развитии съемочной геодезической сети.
Если для измерения расстояний используются светодальномеры других марок, то методика измерения должна быть выбрана в соответствии с необходимой точностью и согласована с формой регистрации всех измерений в специальном журнале (приложение 2).
Измерение углов и расстояний производится на визирную цель (отражатель на штативе или веху с отражателем) (приложения 4, 5), обеспечивающую необходимую точность центрирования, согласно формуле (1.7). При продолжительности работы на станции или при заметном изменении погоды необходимо периодически производить измерения атмосферного давления и температуры. Частотная и метеорологическая поправки в длину измеренной светодальномером линии имеют одинаковый характер влияния и поэтому могут учитываться как коэффициент дальномера. Для наглядности он должен иметь размерность в см на 100 м.
Качество работ по развитию съемочной геодезической сети считается удовлетворительным, если величина Δ не превышает 0,2 мм в масштабе создаваемого плана, где Δ - расхождение контрольного промера и расстояния между точками, полученного по их координатам, а также линейные расхождения в положении точек, определенных дважды.
2.2. Определение координат углов капитальных зданий и сооружений
Определение координат углов капитальных зданий и сооружений производится, как правило, от точек съемочных геодезических сетей, а также от пунктов государственных сетей всех классов и сетей местного значения.
Для этого вида работ оптимальное расстояние до определяемых точек 300 м.
Работа на станции выполняется по описанной ниже методике. Над точкой съемочного обоснования устанавливают теодолит. Светодальномер устанавливают на расстоянии 2 - 10 метров от теодолита таким образом, чтобы не было мертвых зон, образованных взаимным перекрытием видимости инструментов.
Определяют линейный элемент редукции, измеряют рулеткой высоту теодолита над точкой стояния, определяют МО вертикального круга и снимают отсчеты с горизонтального круга на точку ориентирования и центр светодальномера, одновременно берут отсчет по вертикальному кругу теодолита на центр светодальномера, производят измерения атмосферного давления и температуры. Эти данные записываются в журнале и являются общими для всех последующих измерений на станции (приложение 2).
Измерение направлений и вертикальных углов на определяемые точки ведется при одном и том же положении круга. Не изменяя положения горизонтального круга, берут отсчеты на направление визирования, центр отражателя визирной цели, устанавливаемой поочередно на каждую определяемую точку. Контроль ориентирного направления производится в процессе работ через каждые 15 - 20 наблюденных точек или каждые полчаса работы на станции. Предельно допустимое расхождение контрольного отсчета Δ" на точку ориентирования в секундах равно
где Smax - максимальная удаленность (в сотнях метров) координируемой точки от исходной, взятая для контролируемой группы точек.
После снятия контрольного отсчета, если позволяет конструкция теодолита, горизонтальный круг устанавливается в прежнее положение. Для группы определяемых точек с разницей контрольного отсчета, превышающего указанный допуск, измерения выполняются заново при повторном снятии отсчета на точку ориентирования.
Измерение расстояний до определяемых точек (углы зданий, люки колодцев и т.д.) производится аналогично методике измерений при определении точек съемочной геодезической сети, с разницей, что для светодальномера ЕОК-2000 выполняется один отсчет R1.
Измерение высоты визирования производится только для точек, определяемых как в плане, так и по высоте при помощи раздвигающейся вехи. На выдвигающейся части веха должна иметь деления, позволяющие отсчитывать высоту визирования.
Полевой контроль закоординированных точек производится промерами расстояний при одном уложении мерного прибора. Число контрольных точек, определенных редукционно-полярным методом, можно установить не превышающее 5 % от их количества.
Допустимые расхождения контрольных измерений и расстояний, взятых с плана, не должны превышать 0,4 мм в масштабе плана.
2.3. Регистрация результатов измерений
Запись измерений в полевой журнал (приложение 3) ведут четким почерком.
Это особенно важно, если перфорирование исходной информации для обработки на ЭВМ ведется непосредственно с полевого журнала. При координировании точек запись измерений на станции начинают с заполнения заголовка станции, содержащего:
- дату;
- номер точки стояния;
- номер точки ориентирования;
- отсчет по горизонтальному кругу на точку ориентирования;
- место нуля вертикального круга (с точностью до 0',1);
- постоянную поправку дальномера (м);
- суммарную атмосферную и частотную поправку (см. на 100 м);
- температуру (до 1 °С);
- атмосферное давление P (мм рт. ст.);
- атмосферную поправку (мм/км).
Затем заполняют первую строку (нулевой пикет), в которой записывают результаты измерения элементов редукции, т.е. расстояние (до см) от центра теодолита до центра светодальномера, горизонтальный и вертикальный углы на центр светодальномера с точностью до 0',1, высоту инструмента (теодолита) до см.
Строка нулевого пикета заполняется на каждой новой станции или каждой странице журнала при развитии съемочного обоснования. Для каждой определяемой точки в соответствующей ей строке записывают номер точки, высоту визирования, отсчет по вертикальному и горизонтальному кругу при наведении креста сетки нитей теодолита на центр отражателя.
Если в качестве определяемой точки наблюдаются точки съемочной геодезической сети, то в графу «горизонтальный угол» записывают горизонтальное направление на определяемую точку, приведенное к ориентирному. Если редукционно-полярным методом выполняется координирование углов капитальных зданий, то в эту графу записывают отсчет по горизонтальному кругу.
В графе «примечание» делают пометки о принадлежности точек элементам местности.
Отсчеты светодальномера записывают на правой странице журнала. Вычисленное расстояние записывают в графу «наклонная дальность».
При развитии съемочного обоснования каждая страница журнала содержит те же сведения, только данные о состоянии атмосферы записывают в графе «примечание».
2.4. Техника безопасности при топографо-геодезических работах на застроенной территории и промышленных площадках
Все виды полевых топографо-геодезических работ производятся в строгом соответствии с утвержденными техническими инструкциями, наставлениями, техническими проектами и правилами безопасности.
После составления рабочего проекта разрабатывается организационно-техническое предписание каждому исполнителю с подробным указанием правил безопасного ведения работ на данном участке.
Производство топографо-геодезических работ на улицах и площадях с интенсивным движением транспорта согласовывается с местными органами Государственной автоинспекции. Люди, работающие на дорогах (улицах) города, должны знать и соблюдать правила дорожного движения. При работе с оборудованием и инструментами на проезжей части дорог (улиц) города место работы защищается ограждениями, окрашенными в красный и желтый (белый) цвета, и на расстоянии 50 - 100 м с каждой стороны выставляются дорожные знаки «Прочие опасности». Рабочие должны быть одеты в демаскирующие жилеты или куртки оранжевого цвета.
Переходить с инструментами с одной стоянки на другую следует по тротуару или у самой кромки проезжей части улицы навстречу идущему транспорту.
Во время работы с геодезическими инструментами вблизи колодцев или над ними люки колодцев должны быть плотно закрыты крышками.
Забивка металлических штырей, трубок, гвоздей в асфальт для закрепления точек съемочного обоснования допускается без согласования при условии, если длина их не более 15 см.
При производстве работ на территории строительных объектов необходимо обращать внимание на предупредительные и запрещающие надписи, плакаты, знаки на дверях, стенах, ограждениях в опасных зонах и строго придерживаться их.
Работы на железнодорожных станциях и подъездных путях следует производить с соблюдением требований, изложенных в «Правилах по технике безопасности на топографо-геодезических работах» (ПТБ-73 г.) М., Недра, 1973.
К работе со светодальномерами допускаются только лица, прошедшие специальную подготовку.
Строго должны соблюдаться правила эксплуатации и хранения аккумуляторов.
Для работы с радиостанциями на объекте необходимо получить разрешение инспекции радиосвязи и провести с исполнителями инструктаж по правилам работы с ними.
3. КАМЕРАЛЬНАЯ ОБРАБОТКА ПОЛЕВЫХ ИЗМЕРЕНИЙ
3.1. Автоматизированное формирование управляющей информации
В зависимости от конкретных условий работы (объемы, сроки, обеспеченность оборудованием, наличие кадров) камеральная обработка может осуществляться по одной из технологий:
- с использованием ЕС ЭВМ для вычисления координат точек и далее составлением планшетов традиционными методами;
- с использованием ЭВМ и автоматического координатографа.
Для автоматизированного формирования управляющей информации используются комплексы программ первичной обработки результатов полевых измерений, формирования ЦММ и система автоматизации подготовки управляющей информации для АК.
Процесс формирования управляющей информации осуществляется в 3 этапа:
- формирование ЦММ по элементам местности;
- подготовка обращений к системе;
- получение на ЭВМ управляющей информации для рисовки прямолинейных и криволинейных контуров, условных знаков и горизонталей.
Для формирования ЦММ исходными данными является метрическая информация (в виде каталога координат, полученного после работы программ первичной обработки), записанная на диске или введенная с перфокарту семантическая. Семантическая информация, зафиксированная на абрисе, вводится в ЭВМ после составления абрисного списка точек ситуации, содержащего код контура и номера точек в порядке их формирования.
Весь комплекс задач, решаемых на ЭВМ при цифровом картографировании местности, в соответствии с основным процессом производства, обеспечивается разработанным программным комплексом.
Методика подготовки управляющих данных для различных координатографов основывается на одних принципах. Конкретное же содержание и последовательность процессов формирования управляющей перфоленты определяются технико-эксплуатационными возможностями применяемых АК и, в первую очередь, структурой программного обеспечения вычислительного (управляющего) устройства.
3.2. Описание пакета программ первичной обработки полярного способа съемки на ЕС ЭВМ
Для обработки результатов на ЕС ЭВМ традиционной тахеометрической съемки авторедукционным теодолитом - тахеометром, полярного способа горизонтальной съемки, а также результатов измерений электронной тахеометрии и редукционно-полярного метода разработан пакет программ. Результатом работы пакета программ является каталог координат определяемых точек, который используется совместно с каталогом исходных пунктов для составления топографического плана.
Пакет представляет собой библиотеку взаимоувязанных подпрограмм и насчитывает 363 оператора FORTRAN-IV. Подпрограмма SZPPLP является головной подпрограммой библиотеки объектных модулей и содержит в себе вызовы в явной и неявной форме всех остальных модулей библиотеки для данного пакета. Уровень вложенности подпрограмм равен 4 (рис. 3.1).
Для организации работы пакета и для подготовки файлов исходных данных используется система кодовых обозначений процедур обработки (для сферы подготовки данных они являются обозначением технологии). Пакет начинает работу с ввода файла инициирующих данных, который содержит образцы кодовых обозначений для технологий (процедур), используемых в идентификации последующей исходной информации.
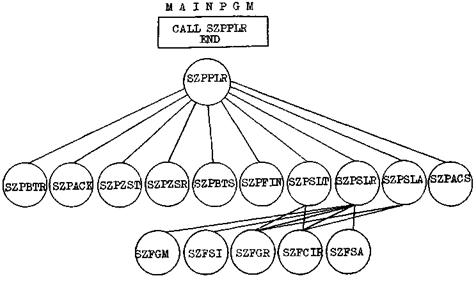
Рис. 3.1. Схема взаимодействия программ пакета
Пакет использует три алгоритма обработки измерений, основанных на полярном способе. Первый из них обеспечивает обработку данных электронной тахеометрии и редукционно-полярного метода, второй - обработку результатов измерений авторедукционной тахеометрии и полярного способа горизонтальной съемки, третий - обработку данных традиционной тахеометрической съемки. Укрупненная блок-схема алгоритма пакета показана на рис. 3.2, в основу которой положен принцип: каждый блок представляет собой логически завершенную часть общего алгоритма. Модули ввода - вывода показаны отдельными блоками. Исключением является печать информационных сообщений - интерфейсная информация о работе модулей и пакета в целом. Печать выполняется каждым модулем самостоятельно по мере необходимости.
Блок 1 - производит ввод файла с инициирующими данными для работы пакета, которые содержат перечень имен методов съемки (технологий).
Блок 2 - производит ввод, отработку и печать каталога координат исходных пунктов. В состав блока входят две подпрограммы. Подпрограмма SZPBTK вводит перфокарты каталога и в случае необходимости распечатывает ошибочные данные на АЦПУ. Эти ошибочные данные из дальнейших расчетов изымаются. Подпрограмма SZPACK выводит на печать оставшиеся точки каталога и передает управление блоку 3.
Блок 3 - вводит карту с именем метода съемки, которое является одним из перечисленных в перечне, упомянутом выше, и производит на основании этого выбор модуля ввода файла данных «Заголовка станции», передавая в зависимости от исхода выбора управление блоку 4 или блоку 5.
Блок 4 - вводит файл с данными «Заголовка станции» для редукционно-полярного метода съемки и съемки с применением электронной тахеометрии. Этот блок состоит из одной подпрограммы с именем SZPZSP, которая вводит «Заголовок станции» и распечатывает его с необходимыми пояснениями, после чего управление передается блоку 6.
Блок 5 - вводит файл с данными «Заголовка станции» для традиционной тахеометрической съемки и съемки авторедукционным тахеометром. Этот блок состоит из одной подпрограммы с именем SZPZST, которая вводит «Заголовок станции» и распечатывает его с необходимыми пояснениями, после чего управление передается блоку 6.
Блок 6 - состоит из одной подпрограммы с именем SZPBTS, которая производит ввод файла измерений указанной станции, отбраковку и печать ошибочных измерений, которые в дальнейшей обработке не участвуют, и печать оставшихся достоверных измерений, после чего управление передается блоку 7.
Блок 7 - состоит из одной подпрограммы с именем SZPFIN. Эта подпрограмма производит поиск координат для указанных в «Заголовке станции» точек в каталоге координат исходных пунктов. В зависимости от результатов поиска управление может быть передано блоку 8 или в случае безрезультатного поиска выводится диагностическое сообщение и происходит аварийный выход на блок 3.

Рис. 3.2. Укрупненная блок-схема алгоритма пакета программ
Блок 8 - производит выбор счетного модуля, реализующего соответствующий методу съемки алгоритм. В зависимости от результатов выбора блока 3 и блока 8 происходит передача управления в 9, 10 или 11 блок.
Блок 9 - состоит из подпрограмм SZPSLA, SZFGR и SZFCIR, которые вычисляют значения координат для всех оставшихся верных точек по алгоритму авторедукционной тахеометрии.
Блок 10 - состоит из подпрограмм SZPSLT, SZFGR и SZFCIR, которые вычисляют значения координат точек по алгоритму тахеометрии.
Блок 11 - состоит из подпрограмм SZPSLR, SZFGM, SZFST, SZFGR и SZFCIR, которые вычисляют значения координат точек по алгоритму (REPS) редукционно-полярного метода и электронной тахеометрии. В результате работы блоков 9, 10 и 11 получают каталог координат определяемых точек и управление передается блоку 12.
Блок 12 - состоит из подпрограммы SZPACS и выводит на печать полученный ранее каталог координат определяемых точек. Этот блок по завершении вывода передает управление блоку 3, тем самым образуя циклическую работу пакета по файлам отдельных станций. Вследствие этого пакет программ POLAR не может иметь нормального завершения обработки входных данных. Для снятия программы достаточно ввести в качестве исходных данных карту «Конец задания». Этой карте должна предшествовать карта «Конец файла».
Пакет программ предусматривает ввод и вывод следующих файлов данных.
Ввод файлов:
1. «Инициирующий файл»;
2. «Каталог координат исходных пунктов»;
3. «Заголовок станции» с признаком технологии;
4. «Измерения на станции»;
Вывод файлов:
1. «Каталог ошибочных координат исходных пунктов»;
2. «Каталог координат исходных пунктов, прошедших проверку»;!
3. «Заголовок станции» без признака технологии;
4. «Отбраковочные измерения на станции»;
5. «Измерения на станции, прошедшие проверку»;
6. «Каталог координат определяемых точек на станции».
Структура входных данных может быть представлена цепочкой входных файлов (рис. 3.3).

![]() - служебный файл операционной системы «Конец задания»;
- служебный файл операционной системы «Конец задания»;
 - группа
файлов, обрабатываемых за один «станционный» цикл.
- группа
файлов, обрабатываемых за один «станционный» цикл.
Рис. 3.3. Структура входных данных пакета
Структура выходных данных может быть представлена цепочкой выходных файлов (рис. 3.4).
![]()
![]() - файл, который
может быть выведен только в зависимости от наличия ошибок во входных файлах 2,
5.
- файл, который
может быть выведен только в зависимости от наличия ошибок во входных файлах 2,
5.
Исключение: файл 5 выводится, если во входном файле 2 и 3 не было допущено ошибок.
Рис. 3.4. Структура выходных данных пакета
Для более успешной эксплуатации пакета и экономии времени необходимо в библиотеке абсолютных модулей сформировать программную фазу, например, с именем POLAR. В этом случае за управляющим оператором //׀__׀ЕХEС׀__׀POLAR должен следовать весь рабочий массив перфокарт, организованный в описанной последовательности. При этом следует учитывать, что файл «Каталог координат исходных пунктов» может содержать не более 100 записей.
С позиции 10 и 17 включительно записывается номер исходной точки. Здесь, как и везде в последующем, номера точек прижимаются к правой границе поля записи номера. В противном случае пустой столбец справа от записанного номера, если он попадает в указанное поле, считывается как 0.
Абсцисса исходной точки записывается с 20-ой по 37-ую позицию, ордината - с 40-ой по 57-ую. В программе предусмотрено два режима записи координат X, Y, H. Первый режим - с фиксированной десятичной точкой, второй режим - с плавающей десятичной точкой.
Первый режим не требует ясного указания на положение десятичной точки, но считается, что разряды поля записи координат, оказавшиеся правее позиции 34 (для абсциссы), 54 (для ординаты) и 64 (для отметки), выражают десятые, сотые и тысячные доли метра. С позиции 73 могут быть записаны любые 8 символов кода ISOI в качестве примечания к координатам.
Второй режим записи координат предусматривает десятичную точку, которая может быть помещена в любое место поля для записи координат. В поле записи перед координатами может помещаться знак «-». Отсутствие знака «-» означает, что число является положительным.
В случае, если физическое количество точек, определяемых на станции, более 100, то необходимо все измерения разбить на две группы и сформировать дополнительный пакет карт с тем же заголовком станции.
Перфокарта «Заголовок станции» содержит:
с 10 по 17 позицию
- номер точки стояния;
с 20 по 27 позицию
- номер точки ориентирования;
с 30 по 37 позицию
- отсчет по горизонтальному кругу теодолита на точку ориентирования до десятых долей минуты с плавающей десятичной точкой;
с 40 по 47 позицию
- МО вертикального круга теодолита до десятых долей минуты с плавающей десятичной точкой (значение МО должно быть дано при «КЛ», как и все угловые измерения на станции);
с 50 по 57 позицию
- постоянная инструментальная поправка светодальномера в метрах с плавающей десятичной точкой;
с 60 по 67 позицию
- поправочный коэффициент за атмосферные условия в см на каждые 100 метров, с плавающей десятичной точкой;
с 75 по 80 позицию
- записывают примечания.
Вслед за картой «Заголовок станции» идут перфокарты измерений, которые могут начинаться с определения элементов редукции, и поэтому первая карта измерений на станции может носить номер определяемой точки ноль (0).
Остальные карты содержат измерения, определяющие положение точек, номер которых указан в позициях с 10 по 17;
измеренное в метрах расстояние с 20 по 27;
высота наведения в метрах с 30 по 37;
отсчет по ВК теодолита до десятых долей минуты с 40 по 47;
отсчеты по ГК теодолита до десятых долей минуты с 50 по 57;
примечание с 73 по 80.
Все данные могут быть записаны как в режиме с фиксированной десятичной точкой, так и с плавающей.
Далее следует закрыть файл «Измерения на станции» картой «Конец файла» подобно тому, как это сделано для файла «Каталог координат исходных пунктов». Количество станций для обработки не ограничено.
Пакет реализуется с использованием ДОС ЕС версии 3.1 и занимает примерно 40 Кбайт оперативной памяти. Для работы пакета необходимо устройство ввода с п/к и устройство алфавитно-цифровой печати.
3.3. Порядок работы при составлении топографических планов на графопостроителе ЕС 7054 в режиме on-line
Автоматическое чертежное устройство (графопостроитель ЕС 7054) служит для графического черчения задач, решенных с помощью программы, или непосредственно в качестве графического выхода вычислительной машины.
Графопостроитель ЕС 7054 состоит из двух основных частей - чертежно-координатного стола с полезной площадью 1600´1200 мм (Дигиграф 1612) и цифровой электронной системы для непрерывного управления чертежный столом. Эта система может обрабатывать входные данные из вычислительной машины через управляющий файл с перфоленты и с магнитной ленты и может работать в режиме on-line и off-line. Обслуживание устройства и выбор рабочего режима осуществляется с помощью панели оператора (приложение 6).
При составлении топографических планов на графопостроителе ЕС 7054 принят следующий порядок работы.
1. После общей проверки всей системы необходимо проверить правильность соединения чертежного стола с электроникой ДАПОС Д-ЗГ соединительным кабелем (подтягивание коннектора прижимной гайкой) и затем включить ДАПОС Д-ЗГ в сеть с помощью шнура. При работе в режиме on-line (при совместной работе с вычислительной машиной) устройство ДАПОС Д-ЗГ присоединяется к сети центрально из вычислительной машины через управляющий элемент (интерфейс) ДАПОСа Д-ЗГ.
2. Включение всей системы производится нажатием на ключик, помещенный на боковой стороне шкафа над вспомогательным столиком датчика перфоленты и поворотом его направо. На панели оператора нажать кнопку ВКЛ.. Включение в сеть сигнализируется загоранием лампочки на кнопке - ВКЛ.. Однако устройство еще не подготовлено к самому черчению. Для правильной работы чертежного стола важно, чтобы у серводвигателя была требуемая температура. Для этого от нажатия кнопки включения ВКЛ. до момента начала черчения должно пройти не менее 5 минут.
3. Во время установления температуры серводвигателей необходимо подготовить чертежный материал и закрепить его на столе.
4. Для черчения подготовить чертежную головку. В зависимости от способа вычерчивания в чертежную головку необходимо вставить соответствующие пишущие устройства, либо пишущее устройство с шариковой ручкой РАХ, либо пишущее устройство с трубчатыми перьями.
Правильная высота пишущего устройства над чертежным материалом регулируется, во-первых, регулировочным винтом на чертежной головке, который изменяет расстояние между чертежной доской и чертежной головкой, а во-вторых, системой гаек на пишущем устройстве. Для черчения трубчатым пером выбирается соответствующее перо, в зависимости от толщины линии, которую необходимо начертить. Выбор пишущего устройства, его работа, движение и скорость черчения программируется в соответствующем коде.
5. Кнопкой РУЧНОЕ УПРАВЛ. включить шкаф ручного управления тем самым чертежный стол подготовлен к перемещению пишущего устройства в исходное положение для черчения. С помощью переключателя на шкафу ручного управления установить одну из трех возможных скоростей передвижения пишущей головки. С помощью кнопок +X, -X, +Y, -Y чертежная головка приводится в движение в нужном направлении. После доезда пишущего устройства в исходное положение отжатием кнопки РУЧНОЕ УПРАВЛ. на панели выключить ручное управление, что сопровождается выключением сигнальной лампочки на шкафу ручного управления.
6. Для работ в режиме on-line на панели отжать кнопку

7. Для включения черчения пишущего устройства согласно программе нужно нажать кнопку ПИШУЩЕЕ УСТР. ПРОГРАММ., потенциометр (_) изменения скорости поставить на НОРМАЛ., выбрать с помощью кнопки нужный масштаб черчения, в случае, если не нажаты кнопки МАСШТАБ 1:2 и МАСШТАБ 2:1, черчение производится в масштабе 1:1. Выбрать с помощью кнопок А, Б, С, Д узлы пишущего устройства, с помощью которых будет производиться вычерчивание, если это не заложено в программном комплексе, и с помощью кнопки СТАРТ включить все устройства.
8. Если произойдет автоматическая остановка устройства под влиянием ошибочного знака, слова, недействительной команды, доезда до упора, переполнения дифференциального счетчика, то загорится лампочка кнопки СТОП. После выявления и устранения ошибок, прежде чем продолжить работу, провести общее зануление устройства нажатием на кнопку СТОП и для продолжения программы черчения нажать кнопку СТАРТ.
9. После окончания отработки программы нажать на кнопку РУЧНОЕ УПРАВЛ., с помощью шкафа ручного управления передвинуть чертежное устройство с плоскости планшета и убрать планшет.
10. Отключение системы выполняется кнопкой ВЫКЛ..
Приложение 1
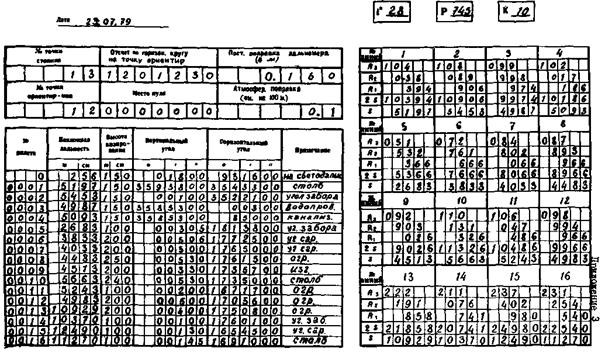
Приложение 2
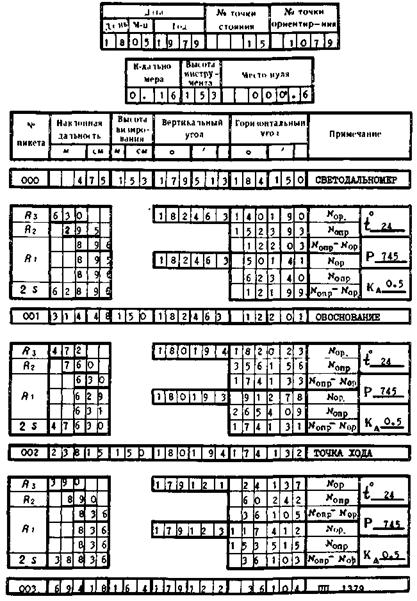
Образец страницы журнала специальной формы для обоснования
Образец страницы журнала топографической съемки редукционно-полярным методом
Приложение 4
Визирная цель
Приложение 5

Приложение 6
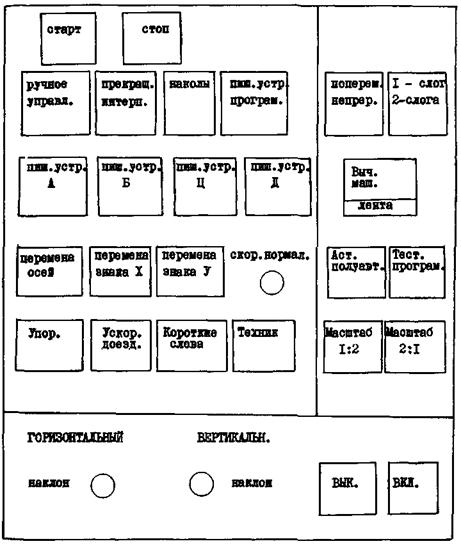
Панель оператора системы ДАПОС Д-ЗГ
СОДЕРЖАНИЕ