МЕТОДИЧЕСКАЯ ДОКУМЕНТАЦИЯ В СТРОИТЕЛЬСТВЕ
ООО «ТЕКТОПЛАН»
ООО «ГЕОЛОГОРАЗВЕДКА»
МЕТОДИКА
ОПРЕДЕЛЕНИЯ ТОЧНОГО МЕСТОПОЛОЖЕНИЯ
И ГЛУБИНЫ ЗАЛЕГАНИЯ, А ТАКЖЕ РАЗРЫВОВ
ПОДЗЕМНЫХ КОММУНИКАЦИЙ (СИЛОВЫХ,
СИГНАЛЬНЫХ КАБЕЛЕЙ, ТРУБОПРОВОДОВ
ГАЗО-, ВОДОСНАБЖЕНИЯ И ДР.),
ПРЕДОТВРАЩАЮЩИХ ИХ ПОВРЕЖДЕНИЯ
ПРИ ПРОВЕДЕНИИ ЗЕМЛЯНЫХ РАБОТ
МДС 11-21.2009
Москва 2010
Разработана ООО «Тектоплан» (канд. техн. наук В.Д. Фельдман, инж. Л.М. Мережко) совместно с ООО «Геологоразведка» (канд. техн. наук С.В. Изюмов, кандидаты физ.-мат. наук С.В. Дручинин, Н.А. Круглов) по заданию Управления научно-технической политики в строительной отрасли Департамента градостроительной политики, развития и реконструкции города Москвы.
Методика согласована с Управлением научно-технической политики в строительной отрасли Департамента градостроительной политики, развития и реконструкции города Москвы.
Настоящая работа содержит методику применения приборов поиска существующих подземных коммуникаций и сооружений, в том числе георадаров, для выявления инженерных подземных коммуникаций на этапах проектирования, строительства и эксплуатации инженерных подземных коммуникаций, зданий и сооружений. Данная методика включает в себя: опережающее зондирование и мониторинг грунта при проходке тоннелей механизированными щитами из забоя; исследования грунтового массива с дневной поверхности по трассе проектирования инженерных подземных коммуникаций, а также мониторинг в период строительства при ведении работ с использованием бестраншейных технологий; исследование строительной площадки и трасс коммуникаций перед строительством зданий, прокладкой подземных коммуникаций и возведением подземных сооружений.
Методика распространяется как документ, рекомендуемый к утверждению в качестве стандарта саморегулируемых организаций (СРО).
Разработчики будут благодарны пользователям издания за замечания и предложения, которые будут учтены при последующих изданиях.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
Анализ аварийных и предаварийных ситуаций, имевших место при проектировании, строительстве и эксплуатации подземных инженерных коммуникаций и сооружений, показывает, что одной из причин аварий является недостаточная изученность инженерно-геологических условий строительной площадки и несоответствие местоположения и высотных отметок действующих инженерных подземных коммуникаций имеющейся топографо-геодезической и инженерно-геологической информации.
При этом информация о существующих подземных коммуникациях часто является неполной и устаревшей. Для снижения числа повреждений подземных коммуникаций в процессе земляных работ необходимы современные технологии и методы определения их точного местоположения.
В настоящее время отсутствуют современные нормы, технологии и требования, обеспечивающие сохранность подземных коммуникаций при производстве земляных работ при строительстве зданий и сооружений, а также определение повреждений и разрывов эксплуатируемых подземных коммуникаций.
Применяемые в настоящее время инженерно-геологические методы не обеспечивают достоверного и объемного представления о геологическом строении верхней части разреза. Повышение эффективности геологических исследований, особенно на ранних стадиях проектирования объектов подземной инфраструктуры, в значительной мере связано с применением геофизических методов.
Картографические материалы, хранящиеся в геоархивах города, начинали создаваться спустя многие годы от начала прокладки подземных и строительства инженерных сооружений, и информация, хранящаяся в архивах, не полностью охватывает и действующие подземные коммуникации, и инженерные сооружения, коммуникации, эксплуатируемые с начала XX века и по настоящее время.
В инженерно-геологических исследованиях с целью проектирования инженерных подземных коммуникаций основным техническим средством до настоящего времени остается разведочное бурение. Наиболее значительным недостатком данной технологии инженерно-геологических изысканий является дискретный характер исследований массива по разрезам отдельных скважин. Даже при весьма густой сети скважин эти исследования не дают достоверного объемного представления о геологическом строении в межскважинном пространстве, а также о пространственной изменчивости инженерно-геологических и гидрогеологических характеристик в нетронутом массиве и расположении действующих инженерных подземных коммуникаций.
Устарели, однако, не пересмотрены, расстояния по горизонтали (в свету) от ближайших подземных инженерных сетей до зданий и сооружений; расстояния по горизонтали (в свету) между соседними инженерными подземными сетями при параллельном размещении, на вводах их в здания и сооружения, при пересечении инженерных сетей - расстояния по вертикали (в свету).
Пересмотр вышеописанных параметров требуется по различным причинам, главными из которых являются изменения материалов, диаметров трубопроводов и кабелей, технологий прокладок, защиты прокладок при последующих земляных работах на этих территориях и пр. Ранее утвержденные нормативные и правовые акты были основаны на технологиях прокладки, фиксации и поиска ранее проложенных коммуникаций с использованием машин, механизмов, оборудования, измерительных средств конца XX века.
Ряд геометрических параметров местоположения подземных объектов техногенного характера (незадокументированных труб, кабелей, подземных выработок, погребенных коллекторов, фундаментов и пр.) или природного происхождения (крупных валунов, карстовых полостей, обводненных линз и т.п.) должен определяться методами инженерно-геофизических исследований.
При проведении строительно-монтажных работ и на стадии проектирования геофизический мониторинг проводится также с целью наблюдения за состоянием грунтов, фундаментов зданий и сооружений, находящихся в зоне ведения работ, при строительстве инженерных подземных коммуникаций, в т.ч. бестраншейными методами.
Необходимость геофизического (георадарного) мониторинга как на этапе проектирования, так и в период и после завершения строительства инженерных подземных коммуникаций определяется следующим. Ошибки в проектировании и строительстве подземных сооружений приводят к нарушениям естественного гидрогеологического режима подземных вод, что иногда приводит к подтоплениям и размывам грунта. Встречаются случаи нарушения технологии проходки тоннелей и прокладки подземных коммуникаций. Эти нарушения могут приводить к просадкам или даже провалам грунта. Известны также случаи значительного выноса грунта в строящиеся тоннели при грубых нарушениях технологии проходки. Суффозионные процессы неизбежно приводят к просадкам и провалам грунта.
Инженерно-геофизические изыскания на территории такого крупного мегаполиса, как Москва, имеют свои специфические особенности. В условиях плотной городской застройки большинство геофизических методов неприменимы из-за отсутствия необходимого места на площадке строительства (например, для бурения скважин) или ввиду значительного уровня техногенных помех. Вместе с тем отказ от использования методов опережающего геофизического контроля при прокладке подземных коммуникаций приводит в ряде случаев к авариям и к значительным финансовым затратам.
Метод подповерхностной радиолокации широко применяется в геофизике. Однако, как показывает практика, для широкого его использования при проектировании и строительстве подземных инженерных коммуникаций, зданий и сооружений необходимы методические рекомендации, которые позволяют учитывать особенности применения данного метода.
Использование современных отечественных и зарубежных машин, механизмов, оборудования, средств поиска ранее проложенных коммуникаций и фиксации местоположения вновь прокладываемых позволяет в комплексе решить проблемы безаварийной прокладки, обнаружения повреждения подземных коммуникаций при производстве земляных работ в процессе строительства зданий и сооружений.
Настоящая работа содержит методику применения приборов поиска существующих подземных коммуникаций и сооружений, в том числе георадаров, для выявления инженерных подземных коммуникаций на этапах проектирования, строительства и эксплуатации инженерных подземных коммуникаций, зданий и сооружений.
Данная методика включает в себя:
опережающее зондирование и мониторинг грунта при проходке тоннелей механизированными щитами из забоя;
исследования грунтового массива с дневной поверхности по трассе проектирования инженерных подземных коммуникаций, а также мониторинг в период строительства при ведении работ с использованием бестраншейных технологий;
исследование строительной площадки и трасс коммуникаций перед строительством зданий, прокладкой подземных коммуникаций и возведением подземных сооружений.
1. ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящая методика предназначена для применения в проектных, строительных, научных и эксплуатационных подразделениях строительного комплекса г. Москвы.
Методика предназначена для проектировщиков, инженерно-технических работников, работников эксплуатирующих организаций, занимающихся прокладкой инженерных коммуникаций, возведением подземных сооружений и их ремонтом, использующих приборы поиска подземных коммуникаций, георадарные технологии, занимающихся георадарным обследованием грунта на трассах тоннелей и обладающих начальными навыками работы с приборами поиска подземных коммуникаций и георадарами.
2. ОБЩИЕ ПОЛОЖЕНИЯ
2.1. К подземным инженерным коммуникациям относят подземные линейные сооружения с технологическими устройствами на них, предназначенные для транспортирования жидкостей, газов, передачи энергии и информации.
2.2. Подземные инженерные сооружения состоят из трубопроводов, кабельных линий и коллекторов. Трубопроводы в зависимости от назначения транспортируемых жидкостей и газа разделяют на водопроводы, теплопроводы, канализацию, газопроводы и трубопроводы специального назначения.
3. ПОИСК ПОДЗЕМНЫХ КОММУНИКАЦИЙ С ИСПОЛЬЗОВАНИЕМ ТРАССОИСКАТЕЛЕЙ
Данный раздел разработан на основе СП 11-104-97 «Инженерно-геодезические изыскания для строительства. Часть II. Выполнение съемки подземных коммуникаций при инженерно-геодезических изысканиях для строительства».
3.1. Методы поиска подземных коммуникаций
Определение местоположения подземных коммуникаций может выполняться следующими методами:
фиксация минимума (максимума) напряженности магнитного поля (классический метод);
SignalSelect - патентованный метод обнаружения направления сигнала на линии.
Этот метод позволяет работать в таких местах, где различные трассы расположены параллельно и на близких расстояниях. Генератор генерирует сигнал звуковой частоты со специальным кодированием, которое подается в трассу, используя прямое или индуктивное подсоединение. Приемник выделяет этот сигнал над трассой и определяет положения. Данный метод реализован в трассоискателе Seba KMT Ferrolux серии FL 10.
SuperMax - решение поиска по методу максимума (специальная связь в использовании традиционных методов максимума и минимума), при этом пользователь может достаточно точно определить положение трассы, не имея при этом вредного сигнала рядом с трассой. Данный метод реализован в трассоискателе Seba KMT Ferrolux серии FL 10.
3.2. Точность определения местоположения подземных коммуникаций
3.2.1. Погрешность определения планового и высотного положений коммуникаций из-за неточностей ориентирования антенны зависит от конструкции приемного устройства и неизбежных случайных погрешностей установки наблюдателем антенны в заданное положение.
Ожидаемые погрешности ориентирования антенны при определении планового Мn и высотного Мr положений коммуникаций можно предвычислить по следующим формулам:
|
|
(3.1) |
|
|
(3.2) |
где h - глубина заложения оси отыскиваемых коммуникаций, см;
ml - погрешность установки антенны, выраженная в виде линейного смещения ее конца от заданного положения (вертикального при определении планового положения или под углом 45° к поверхности земли при определении глубины заложения). При расчетах величину ml принимают равной 1 см;
l - длина футляра антенны, см.
3.2.2. Погрешности фиксации минимума напряженности магнитного поля предвычисляют по формулам:
|
mn = 5·10-5h2; |
(3.3) |
|
mr = 1,4·10-4h2; |
(3.4) |
где mn, mr - погрешности фиксации минимума напряженности магнитного поля при определении соответственно планового и высотного положений коммуникаций, см;
h - глубина заложения оси коммуникаций, см.
Примечания
1. При поиске подземных коммуникаций с глубиной заложения до 3 м погрешности ориентирования антенны определяют точность получаемых результатов.
2. Коэффициент при h2 имеет размерность см-1.
3.2.3. Точность поиска зависит также от комплекса условий: благоприятных и неблагоприятных.
К благоприятным относятся такие условия поиска подземных коммуникаций, когда имеет место сочетание следующих факторов:
смежные коммуникации расположены от отыскиваемой трассы на расстоянии не менее двойной глубины их заложения;
отыскиваемая коммуникация не имеет гальванической связи со смежными через общие металлические конструкции в котельных, насосных станциях и т.д.;
отыскиваемая коммуникация не имеет ответвлений труб равного или большего диаметра;
уровень индустриальных помех меньше уровня полезного сигнала.
Если же смежные коммуникации расположены от отыскиваемой на расстоянии менее двойной глубины ее заложения или уровень помех выше уровня полезного сигнала и т.д., то поиск подземных коммуникаций выполняется в неблагоприятных условиях.
3.2.4. Точность поиска подземных коммуникаций, расположенных в благоприятных условиях, характеризуется следующими формулами:
|
ml = 0,75h; |
(3.5) |
|
mh = 0,13h; |
(3.6) |
где ml, mh - средние квадратические погрешности определения положения коммуникаций соответственно в плане и по высоте, м;
h - глубина заложения оси коммуникации, м.
Формулы могут быть использованы для предрасчета точности поиска подземных коммуникаций, заложенных на глубину до 3 м.
3.2.5. Точность поиска подземных коммуникаций, расположенных в неблагоприятных условиях, в основном зависит от плотности их размещения. Если расстояние между коммуникациями более глубины их заложения, то погрешности определения их планового положения практически равны полученным в благоприятных условиях. При более плотном расположении коммуникаций имеют место значительные величины погрешностей, достигающие 1 м, что является следствием искажающего влияния сложного магнитного поля, возникающего в случае параллельно проложенных коммуникаций. Погрешности высотных определений в основном зависят от величины глубины заложения отыскиваемых коммуникаций, а сами погрешности в среднем не превышают величин, получаемых в благоприятных условиях. При этом необходимо производить измерение глубин заложения в сторону, противоположную местоположению смежных коммуникаций.
Дальность поиска или длина участка трассы, уверенно определяемого с одной постановки генератора трубокабелеискателя, изменяется в широких пределах в зависимости от целого ряда факторов, среди которых решающим является уровень помех, вызванных посторонними источниками переменного тока. В благоприятных условиях дальность поиска в среднем не превышает 1 км, а в неблагоприятных - 0,2 км.
3.2.6. Фиксация минимума (максимума) сигнала над осью трассы (и при определении ее глубины заложения) производится при некоторой полосе неопределенности, в пределах которой высота тона сигнала изменяется незаметно для слуха наблюдателя или изменения сигнала находятся ниже порога чувствительности стрелочного индикатора. Величину расстояния между смежными точками магнитного поля, принадлежащими одной плоскости, перпендикулярной к направлению коммуникации, где имеет место указанная неопределенность, называют шириной минимума (максимума).
Для последующей геодезической привязки точку на местности, соответствующую проекции оси коммуникации, намечают в середине ширины минимума (максимума). Естественно, что чем она меньше, тем с большей точностью можно определять планово-высотное положение коммуникации.
3.2.7. Поиск подземных коммуникаций рекомендуется выполнять в пределах зоны уверенного прослушивания, т.е. такого расстояния от генератора до точек отыскиваемой коммуникации, в пределах которого ширина минимума (максимума) не превышает:
0,2 м - при съемках в масштабах 1:500 и 1:1000;
0,5 м - при съемках в масштабах 1:2000;
1,0 м - при съемках в масштабах 1:5000.
При соблюдении указанной зоны уверенного прослушивания точность поиска подземных коммуникаций, расположенных от смежных с ними на расстоянии, большем глубины заложения отыскиваемых коммуникаций, удовлетворительна для составления планов в масштабах:
1:500 - при глубине заложения до 2 м;
1:1000 - при глубине заложения до 3 м.
Для составления планов в масштабе 1:2000 и мельче результаты поиска подземных коммуникаций, выполняемого в пределах соответствующих зон уверенного прослушивания, могут быть использованы без ограничений глубины заложения и плотности размещения отыскиваемых трасс.
3.3. Порядок проведения работ по поиску подземных коммуникаций
3.3.1. К работе по поиску подземных коммуникаций с помощью трубокабелеискателей следует приступать по завершении обследования колодцев подземных коммуникаций.
3.3.2. Содержание работ по поиску подземных коммуникаций включает:
отыскивание места для наиболее оптимального размещения комплекта трубокабелеискателя;
монтаж электрической схемы, соответствующей принятому методу поиска;
проверку работы включенных генератора и приемного устройства;
отыскивание приемным устройством коммуникации с фиксацией ее планово-высотного положения.
Как правило, поиск коммуникаций осуществляется по методу минимума, а метод максимума применяется для рекогносцировочных целей или контроля.
Примечание - Точная фиксация планового положения трассы производится, когда антенна направлена перпендикулярно к поверхности земли, в точке фиксации имеет место четкий минимум сигнала, а влево и вправо от нее сигнал заметно увеличивается.
3.3.3. Для измерения глубины заложения оси трассы традиционным методом («метод 45°») следует:
отметить точку проекции оси трассы на поверхности земли;
повернуть приемную антенну так, чтобы она была обращена к трассе и составляла угол 45° к поверхности земли;
не изменяя указанной ориентировки антенны, переместиться в направлении, перпендикулярном к трассе, до места минимума сигнала, при этом дальнейшие перемещения антенны к трассе или от нее должны сопровождаться усилением сигнала;
отметить точку, соответствующую минимуму сигнала, и измерить рулеткой расстояние между этой точкой и проекцией оси трассы.
Аналогичные действия выполняются и по другую сторону трассы с взятием среднего результата. При фиксации минимума антенну следует держать в 2 - 5 см от поверхности земли.
В настоящее время производятся трассоискатели, которые позволяют проводить измерение глубины трассы, не применяя «метод 45°» (например, трассоискатели фирмы SEBA KTM). Специальная конструкция приборов позволяет проводить измерение глубины нажатием одной кнопки на панели прибора.
3.3.4. Во время движения по трассе наблюдатель должен руководствоваться наличием звукового сигнала симметричной формы или показаниями микроамперметра и сопоставлять результаты приборного поиска с внешними признаками сетей, технологическими связями между сетями и другими сооружениями.
3.3.5. Наблюдатель должен прекращать дальнейший поиск, когда у него возникают сомнения в достоверности принимаемого сигнала. В основном это возникает в случаях, когда:
амплитуда сигнала уменьшилась настолько, что ширина минимума превышает заданную величину при съемке данного масштаба;
результаты приборного поиска по существу противоречат более обоснованным проектным или технологическим данным, а также внешним признакам сетей;
минимум сигнала не может быть определен из-за высокого уровня помех;
имеет место фиксация резко несимметричных минимумов.
3.3.6. Наблюдатель должен пользоваться следующими методами контроля поиска подземных коммуникаций:
максимума - точке минимума обязательно должен соответствовать максимум сигнала;
измерением глубины заложения - при правильности определения планового положения трассы расхождения между расстояниями в плане, измеренными по обе стороны от проекции оси коммуникации, не должны превышать 15 - 20 % глубины заложения;
поиском особенно сложных участков с двух разных мест установки генератора.
3.3.7. Поиск подземных коммуникаций может выполняться в импульсном или непрерывном режиме работы генератора. При импульсном режиме увеличивается срок эксплуатации элементов питания; импульсы звукового сигнала лучше различаются на фоне высокого уровня помех.
3.3.8. Фиксация планового положения отыскиваемой трассы выполняется на углах поворота и прямолинейных участках. Фиксация углов поворота производится следующими методами:
при отыскивании трубопроводов малых (до 200 мм) диаметров, а в масштабах 1:2000 и 1:5000 всех трубопроводов место угла поворота фиксируется методом двух створов;
для съемки в масштабах 1:500 и 1:1000 трубопроводов большого диаметра, имеющих углы поворота 90°, следует фиксировать начало, середину и конец кривой поворота. Для этого наблюдатель должен перемещать приемное устройство по линиям, нормальным к направлению кривой поворота.
Фиксация точек на прямолинейных участках производится через расстояния не более: 20, 30, 50 и 100 м при съемках в масштабах соответственно 1:500, 1:1000, 1:2000 и 1:5000.
Изломы трасс фиксируются при уклонениях фактического положения их осей от замыкающей линии на расстоянии не менее 0,3; 0,5; 1 и 3 м при съемках в масштабах соответственно 1:500, 1:1000, 1:2000 и 1:5000.
Закрепление указанных точек может быть временным (например, в виде нанесенных на асфальте крестов).
3.3.9. В процессе поиска подземных коммуникаций должен оформляться полевой журнал, в котором указываются:
схема отыскиваемой коммуникации с нанесенными точками привязки;
место подключения генератора;
назначение, диаметр и материал отыскиваемой трассы.
Если поиск подземных коммуникаций выполняется на застроенной территории, то журнал поиска сетей целесообразно совместить с журналом их съемки. В этом случае, кроме приведенного выше, в журнале показывают близлежащую ситуацию и линейные промеры до точек отыскиваемой коммуникации.
Точкам съемки придается сплошная нумерация независимо от вида отыскиваемых коммуникаций. В конце журнала следует указать общую сумму снятых точек.
3.3.10. Данные полевого журнала поиска подземных коммуникаций следует использовать для завершения схемы отрекогносцированных сетей, начатой при обследовании колодцев. На схему следует наносить линии подземных коммуникаций с пронумерованными точками привязки.
Если условия поиска не позволяют выявить с помощью трубокабелеискателей все коммуникации, то должно производиться шурфование с нанесением на схему отрекогносцированных сетей местоположения шурфов.
Окончательно составленная схема отрекогносцированных подземных сетей должна быть согласована с представителями эксплуатирующих организаций.
При поиске подземных коммуникаций на крупных промышленных предприятиях рекомендуется все работы выполнять по видам сетей, соответственно концентрируется полевая документация. Схема рекогносцировки составляется отдельно на каждый вид сети.
3.3.11. Поиск токопроводящих подземных коммуникаций может осуществляться контактным методом. При контактном методе генератор трубокабелеискателя гальванически (непосредственно) подключается к отыскиваемой подземной коммуникации.
3.3.12. Оптимальная электрическая схема, создаваемая при контактном методе, характеризуется следующим:
генератор устанавливается в непосредственной близости от колодца, шурфа или выхода коммуникации на поверхность, где возможно гальваническое соединение генератора и коммуникации;
с помощью соединительного провода, снабженного магнитным контактом, обеспечивается жесткая гальваническая связь между генератором и трубопроводом, для чего на трубе до металлического блеска зачищается площадка размером примерно 2×2 см;
для создания замкнутой электрической цепи генератор заземляется. Заземлитель устанавливается на расстоянии до 10 м в перпендикулярном к трассе направлении.
Заземлитель должен быть погружен в естественный грунт. Установка заземлителя в отвалы грунта, полотно железных и автомобильных дорог, сухой песок, рыхлый пахотный слой почвы и т.п. не создает условий для эффективного использования контактного метода.
3.3.13. Место контакта генератора с трубопроводом при наличии в колодце арматурных соединений должно быть выбрано с учетом направления прослушивания при наибольшей электропроводимости.
При выборе места подключения генератора должен соблюдаться принцип «от малого диаметра к большему».
3.3.14. В зависимости от условий поиска подземных коммуникаций следует регулировать величину выходной мощности генератора трубокабелеискателя. Максимальную выходную мощность целесообразно использовать при поиске протяженных трасс или для преодоления участков с высоким уровнем индустриальных помех. К уменьшению выходной мощности следует стремиться, когда требуется осуществить поиск коммуникаций, расположенных параллельно друг другу, на расстоянии ближе двойной глубины заложения.
3.3.15. Поиск кабельных линий контактным способом может быть осуществлен подключением генератора к броне или жиле предварительно обесточенного кабеля.
При подключении генератора к броне кабеля выполняются те же действия, что и при подключении к трубопроводам.
Если подключение генератора производится к жиле обесточенного кабеля, то необходимо:
у одного из концов отыскиваемого кабеля установить генератор, подсоединить его к жиле и заземлить;
на другом конце кабеля заземлить жилу, к которой подключен генератор.
При указанном способе подключения создается равномерное магнитное поле по всей длине отыскиваемого кабеля, что позволяет производить уверенный поиск кабеля значительной длины (до 10 км).
3.3.16. Электрическая схема может значительно отличаться от оптимальной. При невозможности установить заземлитель в перпендикулярном к трассе направлении его можно отнести вдоль трассы в противоположную от направления прослушивания сторону.
3.3.17. Разновидностью контактного метода является метод «шлейф».
Шлейф - это достаточно длинный провод, с помощью которого отыскиваемая коммуникация и генератор составляют электрическую схему.
Использование шлейфа весьма эффективно в условиях высокого уровня индустриальных помех, когда применение обычного контактного метода становится невозможным. Такие условия часто возникают при отыскивании коммуникаций вблизи промышленных зданий, насосных станций и котельных, где можно обнаружить вводы в здания и отыскать колодцы, принадлежащие к одним и тем же коммуникациям.
Участок коммуникации, заключенный между точками подключения шлейфа, может быть уверенно зафиксирован при весьма высоком уровне помех.
Для применения шлейфа необходимо, чтобы на отыскиваемой коммуникации были доступны для гальванического подключения генератора две точки, удаленные одна от другой не менее чем на 20 м. Максимальная длина шлейфа рекомендуется порядка 300 м.
При пользовании шлейфом необходимо знать примерное направление отыскиваемой коммуникации, поскольку между нею и лежащим на земле шлейфом должно сохраняться расстояние не менее 10 м. В противном случае магнитное поле, образуемое вокруг самого шлейфа, окажется помехой для поиска коммуникации.
3.3.18. При поиске подземных коммуникаций без использования или непосредственного (гальванического) соединения генератора трубокабелеискателя к отыскиваемой коммуникации применяется бесконтактный способ поиска.
3.3.19. В зависимости от источника электромагнитного поля используются следующие разновидности бесконтактного метода:
поиск токопроводящих коммуникаций;
наведенного поля;
поиск токонесущих коммуникаций.
3.3.20. Бесконтактный метод поиска токопроводящих коммуникаций основан на принципе фиксации переменного электромагнитного поля, возбуждаемого задающим контуром.
Примечание - Задающий контур - это генератор трубокабелеискателя, два погруженных в грунт заземлителя и соединительные провода от заземлителей к выходным клеммам генератора.
3.3.21. Бесконтактный метод поиска токопроводящих коммуникаций эффективен при соблюдении следующих условий:
наличие естественного грунта для заглубления заземлителей;
отыскиваемая коммуникация и смежные с ней должны быть расположены на расстоянии не менее двойной глубины заложения отыскиваемой коммуникации;
направление, в котором проложена отыскиваемая коммуникация, должно быть предварительно известно в полосе шириной не более 20 м.
3.3.22. При бесконтактном методе поиск токопроводящих коммуникаций выполняется в следующей последовательности:
генератор устанавливается в рабочее положение в месте, примерно соответствующем положению оси отыскиваемой коммуникации;
по обе стороны от генератора и на расстоянии до 10 м от него заглубляются заземлители;
проверяется работа генератора и приемного устройства в непосредственной близости от места установки генератора;
на расстоянии примерно 20 м от генератора начинается поиск коммуникаций по максимуму или минимуму сигнала, т.е. так же, как и при контактном методе.
3.3.23. Поиск подземных коммуникаций бесконтактным методом рекомендуется выполнять при максимальной выходной мощности генератора, что обеспечивает наибольший продвиг работ.
Заземлители должны быть погружены в грунт на глубину 0,2 - 0,3 м. Если при этом сопротивление внешней цепи окажется более 600 Ом, то следует уменьшить расстояние между заземлителями. Расстояние между заземлителями должно быть не менее 2 м.
3.3.24. Точность бесконтактного метода поиска токопроводящих коммуникаций такая же, как и при контактном методе, но дальность поиска с одной установки задающего контура в 2 - 4 раза меньше.
3.3.25. Поиск токопроводящих коммуникаций рекомендуется выполнять, сочетая контактный метод с бесконтактным. Если отыскиваемая коммуникация имеет выходы на поверхность, легко доступные для гальванического соединения генератора, то рекомендуется использовать контактный метод поиска. При поиске коммуникаций с небольшим числом колодцев или выходов на поверхность и условиях размещения коммуникаций, позволяющих применить бесконтактный метод, следует пользоваться этим методом.
Бесконтактный метод поиска токопроводящих коммуникаций рекомендуется использовать для отыскивания частично нарушенных коммуникаций, фланцевых и раструбных трубопроводов, кабелей, имеющих обрывы, и др.
3.3.26. Разновидностью бесконтактного метода поиска токопроводящих коммуникаций является метод длинного кабеля (длина практически до 100 м).
Заземление кабеля производится заземлителями, расположенными друг от друга на расстоянии 20 - 30 м. Общее количество заземлителей не должно быть более шести. Заземлители подсоединяются параллельно к кабелю и погружаются в естественный грунт на глубину до 0,3 м.
Кабель ориентируется в крест направлению коммуникаций. Если на участке работ коммуникации проложены друг от друга на расстоянии не ближе 10 м, то они могут быть выявлены с одной установки оборудования (генератора, кабеля и заземлителей) на площади 8 га с точностью, достаточной для топографической съемки в масштабе 1:1000 и мельче.
3.3.27. Поиск электрокабелей, находящихся под нагрузкой, производится методом фиксации переменного магнитного поля с частотой 50 Гц.
Метод фиксации переменного магнитного поля рекомендуется использовать для отыскивания отдельных кабелей, расположенных вне зоны помех. Поиск должен производиться приемным устройством по методу минимума или максимума сигнала с точностью контактного метода.
Метод фиксации переменного магнитного поля можно использовать для поиска кабелей слабых токов, если они расположены вне зоны помех и напряженность магнитного поля достаточна для четкого фиксирования сигнала приемным устройством.
3.3.28. Токонепроводящие коммуникации самотечных систем могут быть выявлены индуктивным методом введением дополнительного проводника и токопроводящей жидкости. Напорные трубопроводы для выявления индуктивным методом рекомендуется при строительстве укладывать со специально встроенными проводниками в виде медного провода сечением 3 - 4 мм2.
3.3.29. Метод дополнительного проводника, применяемый для поиска самотечных трубопроводов, включает использование поплавка объемом 100 - 300 см3, закрепленного с мягким медным проводником сечением не более 4 мм2, запускаемого в открытый доступ трубопровода, в существующий поток жидкости на необходимую для прослушивания длину. Генератор подключается к концу проводника, намотанного на специальную катушку, и к заземлителю. Поиск подземных коммуникаций выполняется как и при контактном способе.
3.3.30. Метод токопроводящей жидкости применяют, когда введение дополнительного проводника затруднено. В этом случае используют транспортируемую по трубе жидкость. При этом в зависимости от токопроводящих свойств жидкости поиск может осуществляться двумя способами.
Первый способ применяют при поиске трассы, по которой подаются минерализованные жидкости с высокой электропроводностью. В данном случае в жидкость погружают медный лист с припаянным к нему проводником, идущим от генератора трубокабелеискателя. Генератор заземляют обычным порядком, подбирают соответствующий режим работы и приемным устройством производят поиск коммуникаций. Дальность прослушивания может меняться в очень широких пределах в зависимости от свойств транспортируемой жидкости и состояния окружающего грунта.
Второй способ используют в случаях слабой электропроводности транспортируемой жидкости. Для прослушивания таких коммуникаций подбирают такие вещества или концентрированные растворы, которые, будучи добавленными к транспортируемым жидкостям, придают им свойства электропроводности (например, к таким веществам относятся некоторые соли, щелочи и кислоты).
3.3.31. В результате работ по съемке (поиску) подземных коммуникаций должны быть представлены абрисы съемки подземных сооружений.
3.4. Технические и эксплуатационные характеристики трассоискателей
3.4.1. Систематизация приборов проведена по следующим параметрам:
глубина и точность определения местоположения коммуникаций;
возможность определения токопроводящих и металлических коммуникаций;
возможность определения металлических и неметаллических коммуникаций;
ряд других дополнительных возможностей приборов и точностей определяемых параметров.
Все вышеперечисленные, а также другие возможности приборов и точности определяемых параметров приведены в обобщенной сводной таблице трассоискателей (табл. 4.1).
Таблица 4.1 - Обобщенная сводная таблица трассоискателей для поиска подземных коммуникаций
|
№ п.п. |
Модель |
Аналог. |
Цифров. |
Максимальная глубина определения местоположения, м |
Точность определения местоположения |
|
Трассоискатели российского производства |
|||||
|
1 |
Лидер 1010 (РФ) |
+ |
|
2 |
±0,3 м |
|
Лидер 1011 (РФ) |
+ |
|
5 |
±0,3 м |
|
|
2 |
Абрис ТМ5 (6) (РФ) |
|
+ |
6 м (глубина измерения); |
3 % при глубине ≤ 3 м; |
|
12 м (глубина обнаружения) |
7 % при глубине > 3 м |
||||
|
3 |
Сталкер -2 (РФ) |
+ |
|
7 |
±0,3 м |
|
4 |
Альтернатива АГ-201 (РФ) |
+ |
|
5 |
±0,3 м |
|
5 |
Успех-АТГ-210 (РФ) |
|
|
5 |
±0,3 м |
|
Трассоискатели зарубежного производства |
|||||
|
6 |
Radiodetection CAT3&Genny3 |
|
+ |
3 |
5 % |
|
(7 м с зондами) |
|||||
|
Radiodetection RD 2000 |
|
+ |
3 |
5 % |
|
|
(7 м с зондами) |
|||||
|
Radiodetection RD 4000 |
|
+ |
5 |
5 % до 3 м; |
|
|
(до 8 м с зондами) |
10 % до 8 м |
||||
|
7 |
3M Dynatel 2210 |
|
+ |
4,5 |
5 % |
|
3M Dynatel 2250/2273 |
|
+ |
9 |
5 % |
|
|
8 |
Ridgid SR-20 SeeTech |
|
+ |
10 |
5 % |
|
9 |
Seba Arrow |
|
+ |
4 |
10 % или 5 см |
|
Seba KMT Easyloc |
|
+ |
4 |
10 % или 5 см |
|
|
Seba FM 9860 (9890) |
|
+ |
6 |
5 % или 5 см |
|
|
Seba KMT FerroluxFLIO |
|
+ |
5 |
10 % |
|
|
(7 м с зондом) |
|||||
|
Seba I5000 |
|
+ |
6 |
5 % или 5 см: 0 - 3 м |
|
|
±10 % 3 - 6 м |
|||||
|
10 |
Ebinger EB 950 VLF |
|
+ |
3 |
10 % |
3.4.2. Важнейшими характеристиками трассоискателей являются:
максимальная глубина определения местоположения коммуникаций (2 - 9 м для трассоискателей);
точность определения глубины заложения коммуникаций (5 - 15 % глубины залегания коммуникаций);
возможность поиска разрывов и повреждений коммуникаций.
3.4.3. Персонал должен подробно изучить выбираемый для этих целей прибор и при необходимости пройти подробный инструктаж или обучение по пользованию прибором у продавцов приборов или в профильных учебных заведениях.
3.4.4. Ряд приборов наряду с металлическими коммуникациями обладает возможностью определения неметаллических коммуникаций, в т.ч. проложенных в пластиковых трубах (приборы SR-20 SeeTech (Rigrid) и др. трассоискатели и георадары). Как правило, стандартные трассоискатели не позволяют определять неметаллические коммуникации, за исключением случаев, когда в них устанавливают специальные маркеры. Георадары позволяют определять местоположение всех видов подземных коммуникаций. Георадары основаны на технологии подповерхностного зондирования методом радиолокации (см. раздел 5 Методики).
3.4.5. Ряд технологий позволяет определять местоположение пластиковых труб при помощи акустического датчика или при помощи плавающего датчика. В ряде приборов существует возможность совместного использования трассоискателя и GPS. Как дополнительная немаловажная опция существует функция спецсигнала близкого расположения коммуникаций и другие полезные опции, например, функция отображения на дисплее угла, на который необходимо повернуть прибор, чтобы попасть точно на коммуникацию. В приложении № 1 приведены описания и технические характеристики различных трассоискателей.
3.5. Общие требования по технике безопасности при работе с трассоискателями
3.5.1. При использовании генераторов трубокабелеискателей следует выполнять правила техники безопасности, установленные для работ с действующими электрическими установками.
3.5.2. При производстве работ на территории действующего промышленного предприятия следует соблюдать правила техники безопасности, установленные на данном предприятии, и требования СНиП 12-03-2001 «Безопасность труда в строительстве. Часть 1. Общие требования».
Примечание - При поиске подземных коммуникаций может использоваться переменный ток силой порядка 0,5 А. Безопасным для человека является ток силой до 0,03 А. Токи силой от 0,03 до 0,1 А опасны для здоровья человека и могут вызвать потерю сознания. Токи силой 0,1 А и более являются смертельно опасными.
3.5.3. Включение генератора разрешается производить только по завершении монтажа электрической схемы. Демонтаж электрической схемы без предварительного отключения генератора запрещается.
3.5.4. Соединительные провода, связывающие генератор с отыскиваемой трассой или заземлением, должны быть цельными и с надежной изоляцией. Концы соединительных проводов следует оформлять контактными вилками или наконечниками, размеры и форма которых должны соответствовать клеммам генератора и заземлителя. Для соединения генератора с трассой следует использовать магнитные контакты. Пользоваться оголенными концами проводов для контакта с клеммами генератора или с отыскиваемой трассой запрещается.
3.5.5. Генератор и заземлители во время работы должны находиться под постоянным наблюдением специального выделенного для этой цели работника. Посторонним лицам подходить к работающим приборам запрещается. У заземлителей и генератора следует устанавливать щитки с надписью «Под напряжением».
3.5.6. Во время работы генератора прикасаться руками к токоведущим частям приборов, а также к отыскиваемой коммуникации запрещается. Категорически запрещается находиться в колодцах или шурфах, через которые проходят определяемые коммуникации.
3.5.7. Для проверки наличия напряжения следует пользоваться контрольными приборами.
3.5.8. Для отыскания действующих кабелей все работы по подключению генератора, вскрытию кабеля шурфами следует производить после обесточивания кабеля и обязательно в присутствии представителя эксплуатирующей организации.
3.5.9. Производство работ на трансформаторных подстанциях разрешается только при снятом напряжении. После включения и заземления токоведущих частей нужно установить щитки с надписями: «Не включать - работают люди!» и «Заземлено».
3.5.10. Во время грозы и дождя работы по поиску подземных коммуникаций с использованием трубоискателей должны быть прекращены.
3.5.11. По окончании работ следует убедиться в выключении генератора и приемного устройства, а затем сложить комплект трубокабелеискателя в соответствии с указаниями в техническом паспорте прибора.
4. ГЕОРАДАРНОЕ ЗОНДИРОВАНИЕ
4.1. Планирование и подготовка работ
4.1.1. Порядок планирования и организация геофизических работ с использованием георадаров следующие:
планирование объема работ, выяснение целей и задач исследований. Работы по подповерхностному зондированию следует проводить в соответствии с регламентом;
заказчик работ предоставляет следующие документы и материалы (при их наличии): геологические разрезы, данные о гидрогеологической обстановке, план местности с указанием известных подземных коммуникаций и положение участка подземного строительства;
изучение гидрогеологической обстановки места предстоящих работ, характера местности и условий проведения работ;
выяснение состава и влажности грунтов, наличия и количества глины, уровня грунтовых вод;
взятие образцов грунта и проведение их анализа в лаборатории для исследования затухания радиоволн в грунте на частотах работы георадаров;
уточнение уровня электромагнитных помех. Электромагнитные помехи могут быть значительными при близости телевизионных станций, пунктов ретрансляции мобильной связи и т.п.
4.1.2. В зависимости от задач определяется тип георадара для проведения подповерхностного зондирования.
4.1.3. В соответствии с методикой зондирования определяются размеры площадок зондирования, число и длина профилей, шаг между соседними профилями на площадке. Если зондирование проводится в отдельных точках (положениях антенного блока), то определяются шаг перемещения антенн и число точек зондирования, выбор шага между отдельными положениями антенного блока и между соседними профилями.
4.1.4. План проведения работ включает в себя:
1) перечень необходимых приборов и оборудования;
2) тип используемых антенн георадара вместе с основным георадарным блоком, расстояние между антеннами в антенном блоке (если оно переменное) и т.п.;
3) указание резервной аппаратуры на случай отказа основной аппаратуры;
4) указание недопустимых действий, которые могут привести к выходу из строя аппаратуры;
5) указание всех существенных особенностей работы (необходимость выравнивания площадки или необходимость плотного прижима антенн, использования дополнительных блоков резистивного материала для экранировки антенн; возможность работы или ограничения при проведении работ вблизи ограждений, стен зданий и вблизи других, в особенности металлических, предметов, которые могут повлиять на уровень паразитных отражений и ухудшить качество получаемых результатов; расстояние, на котором посторонние предметы или объекты могут являться существенными источниками помех; специальные требования к процессу проведения измерений, такие, например, как необходимость равномерного (без рывков) перемещения антенн георадара, использование датчика пути и т.п.);
6) указание режимов работы аппаратуры или конкретные указания по настройке аппаратуры на месте в зависимости от условий работы;
7) указание скорости (темпа) проведения измерений. Для георадаров скорость измерений зависит от заданного числа накопления сигналов, которое, в свою очередь, определяется шумовой обстановкой и требуемым отношением сигнал-шум; оговаривается максимальная скорость перемещения антенного блока георадара;
8) указание размера площадок зондирования, числа и длины профилей, шага между соседними профилями, ориентации оси антенного блока относительно линии профиля и т.д. в соответствии с имеющейся методикой;
9) перечень конкретных обязанностей для каждого сотрудника выездной бригады во время проведения зондирования;
10) указание безопасного для здоровья персонала расстояния до передающей антенны георадара в соответствии с инструкцией по эксплуатации аппаратуры;
11) указание допустимого расстояния между сотрудниками и аппаратурой для того, чтобы присутствие персонала не создавало помех (отраженных сигналов);
12) временной график проведения работ; для продолжительных работ разрабатывается календарный план.
4.1.5. Проводятся инструктаж (по технике безопасности и по работе с аппаратурой) и при необходимости обучение сотрудников работе с аппаратурой и с программами записи и обработки сигналов, проверка и испытания аппаратуры, предназначенной для проведения работ. Проводится настройка аппаратуры и выбираются режимы работы аппаратуры в соответствии с задачами.
4.2. Выбор размера площадки зондирования или длины профилей, общие требования
4.2.1. Для получения достоверного изображения при пространственно-временной фокусировке необходимо иметь сигналы, записанные с некоторым запасом по расстоянию вдоль поверхности, вокруг проекции предполагаемого объекта на поверхность грунта. Это необходимо для обеспечения снятия полной серии данных, суммирование по которой вдоль годографа отраженной от объекта волны даст максимально возможный вклад в получаемое изображение объекта. Таким образом, необходимо записать сигналы на некотором участке длиной L над предполагаемым объектом, где минимальная длина L пропорциональна глубине зондирования D:L/D = 1 - 2. Указанная длина определяется шириной диаграммы направленности антенного блока. При расположении проекции объекта на краю исследуемой области результат фокусировки не вполне достоверен, так как суммирование проводилось не по всей возможной серии сигналов, а только по половине, и еще меньше, если проекция объекта находится в углу области.
4.2.2. Выбор размера площадки зондирования определяется также необходимостью достаточно большой площади для предварительной обработки. При неоднородной поверхности грунта (при наличии нескольких типов покрытия) на площадке зондирования бывает необходимо разбить одну большую площадку на несколько площадок малого размера, каждая из которых имеет один тип покрытия. Это бывает необходимым при зондировании объектов, находящихся на малых глубинах.
4.3. Выбор шага между соседними положениями антенного блока и между профилями
4.3.1. Для простоты последующего просмотра и проведения фокусировки антенны должны перемещаться вдоль нескольких параллельных профилей.
Шаг между соседними положениями антенного блока вдоль профиля Sант должен быть не более чем 25 см. Соблюдение этого условия обеспечивает удовлетворительное качество построения изображения и прослеживание годографа отраженных волн от локального объекта на вертикальном сечении вдоль профиля. Шаг между соседними положениями антенной системы вдоль профиля задается шагом датчика пути или скоростью перемещения антенн при сканировании в режиме постоянной скорости.
4.3.2. Расстояние между соседними профилями Sпроф не должно превышать ширины антенного блока, то есть около 0,4 - 1,0 м. Соблюдение этого условия позволит выявить отражения от локальных объектов на площадке зондирования. Оно также обеспечит качественное проведение трехмерной фокусировки. Требуемая минимальная ширина Wmin площадки зондирования и необходимое минимальное число профилей сканирования на ширине площадки Nпроф определяются формулами:
|
Wmin ≈ D; Nпроф ≈ Wmin/Sпроф, |
(5.1) |
где D - диаметр (ширина) подземной коммуникации, м;
Sпроф - шаг между соседними профилями, который составляет не более 0,4 - 1 м.
При этом число профилей не может быть меньше трех.
4.3.3. При поиске локальных объектов, глубина залегания которых примерно известна, расстояние между соседними дорожками сканирования (профилями) не может браться более 0,3 - 0,5D где D - предполагаемая минимальная глубина возможных объектов зондирования. В противном случае локальный объект может быть пропущен, так как не попадет в область пересечения главных лепестков диаграмм передающей и приемной антенн.
4.3.4. Для надежного выявления тонких линейных (трубы, кабели) или сильно вытянутых объектов следует проводить измерения поочередно при двух ортогональных поляризациях излучения.
Оптимальная ориентация антенного блока и направления профиля сканирования относительно направления предполагаемого тонкого вытянутого объекта показаны на рис. 4.1.

Рисунок 4.1. Оптимальная ориентация антенного блока
и направления дорожки
(профиля) сканирования относительно тонкого линейного объекта,
металлического или пустотелого, с диэлектрическими стенками
Передающая и приемная антенны антенного блока отмечены буквами Г, П. Показан случай, когда антенны в антенном блоке расположены по отношению друг к другу в Н-плоскости. Стрелками указано направление электрического поля зондирующей волны.
4.4. Схема сканирования на площадке. Выбор направления сканирования
4.4.1. Поиск линейного объекта (труба, кабель). Если направление предполагаемого линейного объекта приблизительно известно, для выявления объекта достаточно провести сканирование вдоль одной дорожки (профиля), пересекающей возможные места прохождения подземной коммуникации.
4.4.2. Схемы проведения сканирования на площадке показаны на рис. 4.2 и 4.3. Передающая и приемная антенны обозначены буквами Г (генератор) и П (приемник). Стрелки показывают направление движения антенного блока вдоль дорожки (профиля) и направление перехода от профиля к профилю. Зондирование проводится при одном направлении профилей (рис. 4.2) или поочередно для двух ортогональных направлений (рис. 4.3).
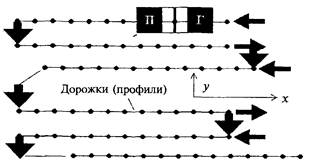
Рисунок 4.2. Схема сканирования вдоль параллельных
профилей
с одной поляризацией излучаемого и принимаемого полей

Рисунок 4.3. Схема сканирования при двух
ортогональных
направлениях прохождения профилей, каждое со своим
направлением поля Е, перпендикулярным профилю
Антенный блок георадара перемещается вдоль параллельных друг другу профилей сканирования. Для простоты последующей обработки и анализа данных профили сканирования должны быть параллельны друг другу (рис. 4.2) или проходить вдоль двух перпендикулярных направлений х и у (рис. 4.3). Начало или конец профиля могут быть сдвинутыми по отношению к началу или концу другого профиля.
Схема сканирования, показанная на рис. 4.2, применяется главным образом тогда, когда возможные линейные коммуникации (трубы, кабели) проходят перпендикулярно направлению профилей или под достаточно большим углом. Также данная схема может применяться, если исследуется геологический разрез и проводится поиск обводненных линз и аллювиальных врезов.
4.4.3. Для поиска подземных коммуникаций, когда их возможное расположение заранее неизвестно и в других сложных случаях, рекомендуется использовать схему перемещения антенн, показанную на рис. 4.3.
4.4.4. Для получения более качественных результатов допускается проводить повторное сканирование по схеме движения, показанной на рис. 4.3, но при другой ориентации антенного блока относительно профиля, чтобы получить качественные результаты. Однако на практике такая полная схема сканирования применяется редко из-за трудоемкости и большого числа измерений.
Если участок зондирования имеет большую протяженность, то он разбивается на отдельные площадки длиной не более 50 - 100 м. Это делается для того, чтобы точность привязки была выше. При использовании для пространственной привязки датчика пути возможны ошибки из-за неровностей грунта, которые могут быть значительными, если профиль будет слишком длинным. По этим площадкам и производится сканирование, как показано на рис. 4.2, 4.3. Затем данные, полученные на отдельных площадках, объединяются программой обработки данных в один общий файл для всей исследуемой площади.
4.4.5. При наличии препятствий, не позволяющих проводить зондирование вдоль прямолинейных и параллельных друг другу профилей, допускается проводить измерения с произвольными местами расположения антенного блока.
4.5. Зондирование грунтового массива с дневной поверхности при строительстве подземного сооружения на этапах проектирования и строительства
4.5.1. При строительстве подземного сооружения или коммуникации как открытыми траншейными методами, так и с использованием бестраншейных технологий проводится зондирование грунтового массива с дневной поверхности. Зондирование проводится на этапе проектирования и строительства подземного сооружения. Цели зондирования - уточнение геологического разреза в межскважинном пространстве, выявление обводненных линз, плывунов, аллювиальных врезов, поиск незадокументированных подземных коммуникаций (в том числе труб, кабелей), крупных валунов и других возможных объектов природного и техногенного характера, способных помешать движению микрощитового комплекса.
На этапе проектирования зондирование проводится вдоль оси трассы прокладки инженерной коммуникации. Площадка зондирования представляет собой полосу вдоль всей трассы, ширина которой определяется размером строящейся подземной коммуникации, а также глубиной расположения подземной коммуникации. Сканирование проводится вдоль отдельных профилей, параллельных оси трассы.
4.5.2. На особых участках трассы, где обнаружены аномалии геологического разреза, другие подземные коммуникации и техногенные зоны, также проводится выборочное зондирование с направлением профилей сканирования поперек направления трассы. Число и длина профилей в этом случае определяются в зависимости от обнаруженной аномалии.
4.5.3. В период строительства подземной коммуникации мониторинг грунтового массива с помощью георадарного зондирования проводится непосредственно перед проходкой каждого интервала. Как правило, длина интервала соответствует расстоянию между стартовым и приемным котлованами. Цель данного мониторинга - обнаружение объектов, которые могли быть построены в период между проектированием и началом строительства, а также для оценки состояния водонесущих сетей. Зондирование при данном виде мониторинга проводится с дневной поверхности с проходкой одного профиля вдоль оси трассы подземной коммуникации. При отсутствии выполнения работ на стадии проектирования работы производятся в полном объеме согласно методике, изложенной выше.
4.6. Мониторинг грунтового массива с дневной поверхности вдоль трассы подземных коммуникаций после завершения их строительства
4.6.1. Зондирование проводится с целью выявления возможных мест разуплотнения или провалов грунта, особенно в местах пересечения построенного коллектора с улично-дорожной сетью города и водонесущими коммуникациями.
Зондирование проводится вдоль одного профиля. Результаты зондирования до и после строительства сравниваются между собой. При этом проводится поиск аномалий на радиолокационных изображениях, которые могли бы быть вызваны перебором грунта и протечками воды.
4.7. Зондирование на строительной площадке при строительстве зданий, сооружений
4.7.1. Зондирование на строительной площадке при строительстве зданий, сооружений, шахтных стволов проводится с целью поиска погребенных фундаментов, труб, кабелей, незадокументированных подземных коммуникаций, карстовых полостей, с целью уточнения геологического разреза между скважинами.
4.7.2. На этапе проектирования зондирование проводится вдоль двух наборов профилей с ортогональным направлением друг к другу и, соответственно, на двух поляризациях. Размер площадки определяется размером котлована с добавлением по краям полосы шириной L не менее чем L ≈ D, где D - максимальная глубина зондирования. Целесообразно проведение зондирования дважды: на большие глубины (3 - 10 м) с более низкой разрешающей способностью и на малые глубины (до 3 м) с лучшей разрешающей способностью. Это позволит выявить как аномалии геологического разреза и возможные карстовые пустоты на больших глубинах, так и найти подземные коммуникации и другие мелкие объекты на малых глубинах.
4.8. Порядок сканирования
4.8.1. Работы по зондированию георадарами вручную проводятся в соответствии с требованиями по технике безопасности.
4.8.2. Определяются схемы проведения сканирования, размеры площадок зондирования, размещение и число профилей, поляризация поля, ориентация антенного блока и другие параметры сканирования в соответствии с данными рекомендациями.
4.8.3. Рассмотрим режимы сканирования. По характеру работы режимы сканирования подразделяются на автономный и режим «реального времени» с использованием компьютера.
Имеется три режима работы, различающихся по характеру записи сигналов и измерению положения антенного блока.
1-й режим. С использованием датчика пути в виде колеса, укрепленного на антенном блоке георадара. В этом режиме измерение координаты антенного блока вдоль профиля сканирования ведется автоматически датчиком пути. Оператор задает требуемое число программных усреднений сигнала, меняя скорость перемещения. Программа считывания данных в компьютер (со встроенной флэш-памятью или в режиме реального времени) производит усреднение всех сигналов георадара, снятых на каждом отрезке переключения датчика пути. Проводя сканирование с малой скоростью, оператор может получить большое число таких программных усреднений сигнала и, следовательно, высокое отношение сигнал-шум.
2-й режим. Режим постоянной скорости. В этом режиме координаты положений антенного блока будут устанавливаться в предположении постоянной скорости перемещения антенного блока. Оператор должен по возможности равномерно, без рывков и выдерживая постоянную скорость, перемещать антенный блок. Оператор задает требуемое число программных усреднений сигнала, устанавливая ту или иную скорость перемещения антенного блока.
3-й режим. Режим записи сигналов в отдельных точках (положениях антенного блока). В этом режиме оператор дискретно перемещает антенный блок с заданным шагом вдоль профиля и в каждой такой точке профиля включает и затем выключает запись сигналов. Оператор задает требуемое число программных усреднений сигнала, устанавливая число усреднений сигналов в каждой точке либо регулируя время измерений сигналов в каждой точке. Этот способ является наиболее подходящим для измерений, когда необходимо получить очень высокое отношение сигнал-шум. Время измерения сигналов в каждой точке может составлять несколько десятков секунд, в зависимости от уровня случайных помех техногенного характера (радиостанции, мобильная связь) и от желаемого уровня отношения сигнал-шум. Чем дольше проводятся измерения, тем выше отношение сигнал-шум, пропорционально корню квадратному от времени измерения сигналов.
4.9. Выбор площадки и подготовка перед сканированием
4.9.1. Если зондирование проводится по открытому грунту, перед зондированием следует (при возможности) выровнять площадку зондирования и убрать мешающие предметы.
4.9.2. Размеры площадки зондирования и длины профилей должны быть измерены рулеткой или лазерным дальномером. Расположение площадки или профилей должно быть привязано к ориентирам на местности. План местности с подробным описанием условий измерений и ориентиров привязки должен быть занесен в полевой журнал. Необходимо проводить фотодокументацию площадки зондирования.
4.9.3. При измерениях без датчика пути сканируемый участок большой длины следует разбить на множество коротких участков, длиной не более 10 м каждый. После окончания измерений данные, полученные на этих отдельных участках, должны сшиваться в общий профиль. Такое разбиение участка сканирования позволит получить удовлетворительную точность привязки найденных объектов и неоднородностей грунта к местности.
4.9.4. Занесение в журнал сведений о посторонних предметах, которые могут впоследствии оказаться на радиолокационном изображении и представлять помехи при интерпретации. Таковыми предметами являются столбы, опоры ЛЭП, контактная сеть, металлические и железобетонные ограждения, металлические сооружения и механизмы, автомашины и т.п.
4.10. Обработка и интерпретация результатов георадарного зондирования
4.10.1. Перечень исходных данных для проведения камеральной обработки и интерпретации результатов зондирования
4.10.1.1. Оригинальные файлы, полученные при измерениях.
4.10.1.2. Данные о расположении профилей и площадок зондирования. Должны прилагаться план местности с нанесенными подземными коммуникациями и инженерно-геологические разрезы с продольным профилем строящейся подземной коммуникации.
4.10.1.3. План и описание местности.
4.10.1.4. Описание условий измерений. Необходимо указать наличие осадков или факт недавнего выпадения осадков, насколько был влажным или сухим грунт и т.п. Указываются характер и примерная величина неровностей поверхности, по которой перемещался антенный блок.
4.10.1.5. Описание и пробы грунта. Для грунта необходимо указать влажность, тип (глинистый, песчаный). Желательно знать уровень грунтовых вод. Иметь геологический разрез и информацию о геологическом строении.
4.10.2. Методика обработки сигналов и построения трехмерного изображения в камеральных условиях
4.10.2.1. В камеральных условиях проводятся как предварительная, так и дополнительная, более детальная обработка сигналов и фокусировка. Предварительная обработка во многих случаях сразу дает достаточно хорошее представление о некоторых объектах зондирования, так что последующих обработки и фокусировки может не потребоваться.
4.10.2.2. Перед проведением обработки сигналов проверяется правильность ввода координат и длин профилей сканирования, положений антенного блока. Задают параметры обработки, размеры площадки, для которой производится построение трехмерного изображения, шаги и максимальную глубину для построения трехмерного изображения, Проводится предварительная обработка сигналов.
4.10.2.3. Изучаются результаты предварительной обработки в виде вертикальных радиолокационных профилей или горизонтальных сечений объема. Проводится анализ выявленных объектов или других аномалий радиолокационного изображения.
4.10.2.4. Программа обработки должна обеспечивать необходимый набор средств визуализации результатов зондирования, который должен позволить провести качественную интерпретацию результатов:
изображение вертикальных радиолокационных профилей с результатами предварительной обработки вдоль каждого профиля сканирования;
изображение вертикальных и горизонтальных сечений исследуемого объема. Должен иметься удобный интерфейс, позволяющий задавать сечения для просмотра.
4.10.3. Методика интерпретации результатов георадарного зондирования
4.10.3.1. Интерпретация результатов зондирования является последним этапом обработки и анализа данных. Интерпретация включает анализ полученных радиолокационных изображений, учет всех имеющихся данных по геологическому разрезу на площадке зондирования, данные о типах и электрических характеристиках грунтов. Интерпретация включает сравнение получаемых радиолокационных изображений с типичными радиолокационными изображениями для ряда известных объектов (например, труб, полостей заданного размера, локальных и протяженных объектов), полученными или в результате численного моделирования, или из результатов и прошлого опыта зондирования на аналогичных объектах.
Интерпретация результатов георадиолокационного зондирования проводится в соответствии с разработанной и утвержденной методикой интерпретации данных.
4.10.3.2. При проведении интерпретации анализируются радиолокационные изображения, полученные после предварительной обработки.
Анализируется общее содержание радиоволновой картины, проверяется наличие отражений от локальных и линейных объектов, выявляются отражения от плоских или протяженных объектов типа слоев и границ раздела в грунте. Выявляются отражения от объектов, находящихся в воздухе, в том числе от зданий и других предметов, находящихся в стороне от площадки, по характерным полосам постоянного наклона на радиолокационных изображениях.
По форме изображений отражений на профиле производится выявление локальных объектов и объектов, выглядящих как локальные, но которые могут быть линейными объектами, проходящими перпендикулярно профилю.
Анализируются изображения, полученные на ряде параллельных профилей, проходящих через площадку зондирования. Выявляются линейные объекты, которые видны на нескольких профилях и которые проходят перпендикулярно или под углом к профилям. Изображения найденных объектов анализируются на изображениях горизонтальных сечений трехмерного изображения, построенного для всего исследуемого объема.
Для каждого из найденных локальных и линейных объектов выясняется знак отражения. По знаку отражения делается вывод о типе объекта по составу: предположительно металлический (или влажный) или пустотный (или диэлектрический).
Найденные локальные и линейные объекты заносятся в таблицы отчета вместе с параметрами объекта - глубиной, координатами и возможным типом по составу. Метки и подписи с указанием номеров найденных объектов наносятся на радиолокационные изображения на вертикальных профилях. Результаты выявления техногенных объектов сравниваются и сверяются с имеющимися планами подземных коммуникаций. Все выводы заносятся в итоговый отчет.
Выделяются отражения от слоев или границ раздела в грунте. Результаты выявления границ раздела и слоев в грунте сверяются с имеющимися геологическими разрезами и заносятся в таблицу.
4.10.3.3. В спорных случаях или при поиске объектов заранее известной или предполагаемой формы и состава может проводиться дополнительно численное моделирование и расчет отраженного сигнала. Моделирование проводится методом конечных разностей. Моделируется процесс излучения и приема импульсов антеннами георадара. Учитываются реальные электрические характеристики грунта и его предполагаемое строение. Моделируются объекты зондирования. Результаты расчета отраженных сигналов сравниваются с наблюдаемыми отраженными сигналами.
4.10.3.4. Все результаты анализа данных и интерпретации изображений вместе с выводами заносятся в итоговый отчет.
4.11. Отчетные графические материалы, предоставляемые заказчику
4.11.1. Заказчику работ предоставляются результаты в виде итогового отчета. Итоговый отчет должен включать следующие материалы:
описание целей и задач работ;
краткое описание используемой геофизической аппаратуры;
условия проведения георадиолокационного зондирования;
краткое описание методов обработки результатов;
фотографии с места проведения работ;
условные обозначения различного вида объектов и аномалий на приводимых рисунках;
описание палитры цветов, используемой для представления результатов на радиолокационных профилях.
4.11.2. Результаты георадарного зондирования должны включать вертикальные радиолокационные профили после предварительной обработки для всех профилей сканирования. Результаты последующей более детальной обработки приводятся для отдельных участков.
4.11.3. При зондировании на площадке приводятся результаты в виде горизонтальных сечений объема (вид в плане) на различных глубинах или в режиме изображения «прозрачного объема» сразу для всех сечений в заданном интервале глубин.
4.11.4. Для отдельных участков могут приводиться изображения проекции трехмерной вырезки из исследуемого объема под заданными углами просмотра.
4.11.5. Таблицы, где указаны обнаруженные объекты и аномалии исследуемого участка с указанием координат и глубин. На радиолокационных профилях должны быть нанесены метки с указанием номеров объектов в таблицах. Указывается тип объекта по форме (локальный, протяженный, линейный (труба)) и по составу (металлический, железобетонный, диэлектрический, полость, зона разуплотнения).
4.11.6. План местности с указанием расположения найденных объектов или аномалий строения грунта.
4.11.7. В отчете приводится анализ полученных результатов с указанием другой интерпретации при возможной неоднозначной интерпретации.
4.11.8. Указание помех и паразитных отражений, если такие будут, на полученных радиолокационных изображениях.
4.11.9. Результаты специальных исследований, например, распределения электрических характеристик грунта по глубине, полученные методом общей глубинной точки.
4.11.10. Результаты проведения контрольных бурений или вскрытий грунта (если проводились) и сопоставление с данными, полученными в ходе георадарного зондирования.
4.11.11. Основные выводы.
4.11.12. В приложении на отдельных листах формата А1 обычно даются геологический разрез, план местности с указанием площадок и расположением найденных объектов, длинные радиолокационные профили или отдельные изображения крупным планом.
4.11.13. В основных выводах итогового отчета отдельным пунктом указываются объекты и аномалии, которые могут являться причиной возможных провалов или просадок грунта или других возможных аварий.
4.12. Требования по составу и подготовке персонала
4.12.1. Требования по численности и подготовке персонала
4.12.1.1. Зондирование георадаром вручную контактным методом осуществляется двумя операторами. Второй оператор фиксирует положение объектов, создающих помехи в работе приборов (например, воздушные линии), осуществляет привязку профилей и контролирует направление движения.
4.12.1.2. Операторы, проводящие запись сигналов георадара, должны иметь специальную подготовку, которая включает следующее:
1) курс лекций по теории георадиолокации в объеме не менее 8 ч;
2) курс лекций по практическому применению георадаров, методике проведения зондирования и обработки данных в течение не менее 8 ч;
3) обучение работе с аппаратурой и программой записи данных (считывания данных из флэш-памяти прибора) и обработки в течение трех дней. Изучение инструкции по эксплуатации для каждой модели георадара, используемой в работе. Изучение описания программы для записи и обработки данных;
4) изучение разработанной методики зондирования;
5) проведение практических работ по зондированию под руководством специалиста не менее трех дней;
6) инструктаж по технике безопасности для работы с электроизмерительными приборами.
После обучения проводится сдача экзамена по теоретической части и зачета по практической части.
4.12.1.3. К сотрудникам, проводящим обработку результатов георадарного зондирования, анализ и интерпретацию результатов, предъявляются следующие требования. Сотрудник должен иметь высшее образование, квалификацию инженера-геофизика, геолога. Специальная подготовка включает следующее:
1) курс лекций по теории георадиолокации в объеме не менее 8 ч;
2) курс лекций по практическому применению георадаров, методике проведения зондирования и обработки данных в течение не менее 8 ч;
3) обучение работе с георадарами, изучение инструкций по эксплуатации;
4) изучение разработанной методики георадарного зондирования;
5) обучение работе с программой для обработки данных. Изучение описания программы;
6) изучение методики интерпретации результатов зондирования;
7) практические занятия по зондированию, обработке и интерпретации результатов георадарного зондирования под руководством специалиста в течение не менее 5 дней;
8) инструктаж по технике безопасности для работы с электроизмерительными приборами.
После обучения проводится сдача экзамена по теоретической части и написание отчета по результатам самостоятельно проведенного зондирования, обработки и интерпретации результатов.
4.12.1.4. Требования к персоналу, проводящему обработку, интерпретацию результатов георадарного зондирования и составление итогового отчета, следующие. Указанная работа проводится не менее чем двумя операторами. Один из них должен иметь квалификацию геолога. Он должен проводить анализ имеющихся геологических разрезов и другой проектно-технической документации строительного объекта, на котором проводится зондирование. Операторы должны иметь квалификацию и специальную подготовку, а также опыт работы по данному направлению в геофизике не менее двух лет.
4.12.2. Рекомендуемый состав отряда для проведения подповерхностного зондирования
Рекомендуемый состав отряда:
инженер-геофизик - 1 чел.
инженер-геолог - 1 чел.
водитель - 1 чел.
рабочий - 1 чел.
Обязанности членов отряда:
Инженер-геофизик (оператор) - планирует работы, проводит техническое обслуживание аппаратуры, собирает георадары в рабочее состояние, проводит их настройку, следит за ходом измерений, разбирает аппаратуру после завершения работ. После выполнения полевых работ в камеральных условиях совместно с инженером-геологом проводит обработку данных и интерпретацию результатов.
Инженер-геолог - участвует в рекогносцировочном осмотре, отмечает по косвенным признакам изменение грунтово-гидрогеологических условий, отбирает пробы грунта для последующего лабораторного анализа, фиксирует информацию о взятых пробах (вид материалов, тип и консистенцию грунта). После выполнения полевых работ в камеральных условиях совместно с инженером-геофизиком участвует в обработке данных и интерпретации результатов. В лабораторных условиях определяет состав и физико-механические свойства отобранных материалов и грунтов.
Водитель - доставляет отряд и оборудование до места проведения работ, вывозит отряд и оборудование после завершения работ.
Рабочий - обеспечивает погрузку и разгрузку оборудования, участвует в разбивке площадки, отборе проб. При необходимости выполняет перемещение антенн при сканировании.
4.13. Общие требования по технике безопасности при работе с георадарами
4.13.1. К работе с аппаратурой допускаются лица, прошедшие инструктаж по технике безопасности для работы с электроизмерительными приборами.
4.13.2. Техническое описание георадаров должно содержать требования по технике безопасности и обеспечению безопасности для здоровья обслуживающего персонала и окружающих людей.
4.13.3. К работе с аппаратурой допускаются лица, прошедшие обучение и изучившие инструкцию по эксплуатации для используемой аппаратуры.
4.13.4. Необходимо строго соблюдать требования по технике безопасности, изложенные в инструкции по эксплуатации аппаратуры.
4.13.5. Пользователю запрещается разбирать аппаратуру и производить другие операции, не предусмотренные инструкцией по эксплуатации.
5. НОРМАТИВНЫЕ И МЕТОДИЧЕСКИЕ ДОКУМЕНТЫ
1. Земельный кодекс Российской Федерации от 25.10.2001 № 136-ФЗ.
2. Градостроительный кодекс Российской Федерации. Глава 6. Архитектурно-строительное проектирование, строительство, реконструкция объектов капитального строительства.
3. Закон г. Москвы от 14.05.2003 № 27 «О землепользовании и застройке в городе Москве».
4. Постановление Правительства Москвы от 16 декабря 1997 г. № 896 «О мерах по усилению контроля за строительством и реконструкцией при производстве работ в стесненных условиях окружающей сложившейся застройки».
5. Приказ Председателя Москомархитектуры от 01.12.2004 № 180 «Об утверждении пособия «Обследование и мониторинг при строительстве и реконструкции зданий и подземных сооружений» к МГСН 2.07-01 «Основания, фундаменты и подземные сооружения»».
6. СНиП III-44-77 Тоннели железнодорожные, автодорожные и гидротехнические. Метрополитены.
7. СНиП II-11-77* Защитные сооружения гражданской обороны.
8. СНиП 11-02-96 Инженерные изыскания для строительства. Основные положения.
9. СНиП II-89-80* Генеральные планы промышленных предприятий.
10. СНиП III-42-80* Магистральные трубопроводы.
11. СНиП 2.04.02-84* Водоснабжение. Наружные сети и сооружения.
12. СНиП 2.05.03-84* Мосты и трубы.
13. СНиП 2.06.09-84 Туннели гидротехнические.
14. СНиП 3.02.03-84 Подземные горные выработки.
15. СНиП 3.01.03-84 Геодезические работы в строительстве.
16. Пособие по производству геодезических работ в строительстве (к СНиП 3.01.03-84).
17. СНиП 2.01.55-85 Объекты народного хозяйства в подземных горных выработках.
18. СНиП 2.04.03-85 Канализация. Наружные сети и сооружения.
19. СНиП 3.05.04-85 Наружные сети и сооружения водоснабжения и канализации.
20. СНиП 3.05.03-85 Тепловые сети.
21. СНиП 2.05.06-85* Магистральные трубопроводы.
22. СНиП 41-02-2003 Тепловые сети.
23. СНиП 3.01.04-87 Приемка в эксплуатацию законченных строительством объектов. Основные положения.
24. СНиП 2.07.01-89* Градостроительство. Планировка и застройка городских и сельских поселений.
25. СНиП 3.06.04-91 Мосты и трубы.
26. СНиП 12-01-2004 Организация строительства.
27. СП 34-106-98 Подземные хранилища нефти, газа и продуктов их переработки.
28. СП 11-105-97 Инженерно-геологические изыскания для строительства. Часть 1. Общие правила производства работ.
29. СП 11-105-97 Инженерно-геологические изыскания для строительства. Часть VI. Правила производства геофизических исследований.
30. СП 11-104-97 Инженерно-геодезические изыскания для строительства.
31. СП 11-104-97 Инженерно-геодезические изыскания для строительства. Часть II. Выполнение съемки подземных коммуникаций при инженерно-геодезических изысканиях для строительства.
32. ВСН 160-69 Инструкция по геодезическим и маркшейдерским работам при строительстве транспортных тоннелей.
33. ВСН 352-75 Инструкция о ведении исполнительной документации при проведении водопонизительных работ.
34. ВСН 2-85 Нормы проектирования, планировки и застройки Москвы.
35. ВСН 66-081-88 Геодезическо-маркшейдерское обеспечение строительства тоннелей в городах и промышленных предприятиях.
36. ГОСТ 5865-51 Железные дороги узкоколейные наземные и подземные.
37. ГОСТ 2.856-75 Горная графическая документация. Обозначения условные производственно-технических объектов.
38. ГОСТ 2.853-75 Горная графическая документация. Правила выполнения условных обозначений.
39. ГОСТ 2.855-75 Горная графическая документация. Обозначения условные горных выработок.
40. ГОСТ 2.850-75 Горная графическая документация. Виды и комплектность.
41. ГОСТ 2.851-75 Горная графическая документация. Общие правила выполнения горных чертежей.
42. ГОСТ 21.108-78 Условные графические изображения и обозначения на чертежах генеральных планов и транспорта.
43. ГОСТ 23616-79* Контроль точности.
44. ГОСТ Р 51872-2002 Документация исполнительная геодезическая. Правила выполнения.
45. МГСН 4.04-94 Многофункциональные здания и комплексы. - М., 1994.
46. МГСН 2.07-97 Основания, фундаменты и подземные сооружения. - М., 1998.
47. МГСН 8.01-00 Приемка и ввод в эксплуатацию законченных строительством объектов. Основные положения.
48. Пособие к МГСН 2.07-01 Обследование и мониторинг при строительстве и реконструкции зданий и подземных сооружений.
49. МГСН 6.01-03 Бестраншейная прокладка коммуникаций с применением микротоннелепроходческих комплексов и реконструкция трубопроводов с применением специального оборудования. - М., 2004.
50. ПБ 03-428-02 Правила безопасности при строительстве подземных сооружений.
51. РД 07-166-97 Инструкция по наблюдениям за сдвижениями земной поверхности и расположенными на ней объектами при строительстве в Москве подземных сооружений.
52. Инструкция по проектированию зданий и сооружений в районах г. Москвы с проявлением карстово-суффозионных процессов. - М.: Изд. Моссовета, 1984.
54. Рекомендации по проектированию и устройству оснований, фундаментов и подземных сооружений при реконструкции гражданских зданий и исторической застройки/Москомархитектура. - М., 1995.
55. Руководство по геодезическим работам при устройстве подземных коммуникаций. - М.: Стройиздат, 1983.
56. Руководство по применению микротоннелепроходческих комплексов и технологий микротоннелирования при строительстве подземных сооружений и прокладке коммуникаций закрытым способом. - М., 2004.
57. Комплексные инженерно-геофизические исследования при строительстве гидротехнических сооружений/Под ред. А.И. Савича и Б.Д. Куюнджича. - М.: Недра, 1980.
58. Применение геофизических методов для изучения скальных оснований: Сборник научных трудов Гидропроекта/Под ред. А.И. Савича. Выпуск 114. - М., 1986.
59. Владов М.Л., Старовойтов А.В. Обзор геофизических методов исследований при решении инженерно-геологических и инженерных задач. - М., 1998.
60. Вопросы подповерхностной радиолокации/Под ред. А.Ю. Гринева. - М.: Радиотехника, 2005.
61. Теория и методы георадиолокации/С.В. Изюмов, С.В. Дручинин, А.С. Вознесенский. - М.: Горное дело, 2008.
62. Инструкция по инженерно-геологическим и геоэкологическим изысканиям в г. Москве. Утверждена и введена в действие указанием Москомархитектуры от 11.03.04 № 5.
63. Постановление Правительства Москвы от 06.12.2005 «Об обеспечении сохранности подземных сетей и коммуникаций при производстве земляных и строительных работ в городе Москве».
Приложение 1
ОПИСАНИЯ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РАЗЛИЧНЫХ МОДЕЛЕЙ ТРАССОИСКАТЕЛЕЙ
1. Трассоискатели российского производства
1.1. Лидер 1010
Кабелеискатель «ЛИДЕР 1010» - самый простой и дешевый прибор из серии аналоговых трассоискателей. Он предназначен для определения местоположения и глубины залегания силовых кабелей и газопроводов на глубине до 2 м, имеет возможность определения мест повреждения кабельных линий индукционным методом.
|
Рабочая температура, °С |
-30 ... +45 |
|
Точность определения трассы, м |
±0,3 |
|
Глубина, м |
До 2 |
|
Рабочие частоты приемника, Гц |
50; 100; 50 - 1200 |
|
Источник питания приемника |
Аккумулятор 12 В |
1.2. Лидер 1011
Комплект трассоискателя «ЛИДЕР 1011» предназначен для определения местоположения и глубины залегания скрытых коммуникаций (силовые и сигнальные кабели, трубопроводы) на глубине до 5 м и удалении до 2 км от места подключения генератора, имеет возможность определения мест повреждения кабельных линий индукционным методом.
Отличительной характеристикой комплекта «Лидер 1011» является повышенная степень влагозащиты, более удобное управление прибором и удачное расположение мест присоединения проводов (все входы расположены на задней панели, а не на передней, как у аналогов), встроенные аккумуляторы в приемник и генератор.
|
Точность определения трассы, м |
+0,3 |
|
Глубина, м |
До 5 |
|
Диапазон рабочих частот генератора, Гц |
1024; 8926 |
|
Рабочие частоты приемника, Гц |
50; 100; 1024; 8924; 50 - 1200 |
|
Мощность генератора, Вт |
8 |
|
Источник питания генератора |
Аккумулятор 12 В |
|
Источник питания приемника |
Аккумулятор 12 В |
|
Рабочая температура, °С |
-30 ... +45 |
1.3. Абрис ТМ5 (ТМ5-П, ТМ6, ТМ6-П)
Серия универсальных трассопоисковых приборов «Абрис» производства фирмы АКАГЕО (Россия) предназначена для:
точного определения местоположения и глубины залегания подземных коммуникаций (силовых и сигнальных кабелей, трубопроводов водоснабжения, канализации, газоснабжения и любых других протяженных металлических предметов);
быстрого и надежного обследования территории перед началом земляных работ;
экстренного поиска повреждений при необходимости проведения аварийного ремонта.
Генератор трассопоисковый ТГ12-2
Предназначен для наведения переменного тока звуковой частоты на расположенные под землей трубопроводы и кабели. Выходной мощности генератора достаточно для трассировки линии на расстоянии до 2000 м. Генератор ТГ24-2 позволяет наводить больший ток и, соответственно, работать на удалении до 3000 м. Питание осуществляется от встроенных аккумуляторных батарей. Заряд производится от зарядного устройства (сети переменного тока 220 В, 50 Гц), а также от внешнего источника питания постоянного тока с напряжением от 10 до 15 В (аккумулятор автомобиля). Процесс заряда полностью автоматизирован и контролируется встроенным микропроцессором, что увеличивает срок службы аккумуляторов и сокращает время заряда.
Приемник трассопоисковый ТМЗ-1
Предназначен для быстрого зондирования территории с целью обнаружения подземных кабелей и металлических трубопроводов, их трассировки, а также определения глубины их залегания. Режимы пассивного поиска позволяют при помощи приемника определять местоположение подключенных кабелей и трубопроводов с катодной защитой.
Благодаря наличию большого частотного диапазона может работать как в пассивном режиме, так и в активном - с использованием любого из генераторов серии АБРИС.
В пассивном режиме, по трем частотным диапазонам, можно различить энергетические кабели, телефонные и газопровод отдельно друг от друга.
Отличительные особенности: определение отклонения от оси трассы; цифровое измерение глубины; цифровое измерение тока; разделение при поиске труб и кабелей (режим 50 + 100 Гц); максимально точное определение оси (при использовании поиска по минимуму).
В пассивном режиме, по трем частотным диапазонам, можно различить энергетические кабели, телефонные и газопровод отдельно друг от друга.
Приборы адаптированы для самых неблагоприятных полевых условий. Существует модификация приборов для подводных исследований. Корпус приемника изготовлен из высокопрочного окрашенного пластика и стоек к атмосферным воздействиям во всем диапазоне рабочих температур.
Для работы в составе трассопоискового комплекта возможно использование любого генератора в сочетании с приемником.
Технические характеристики трассоискателей «Абрис»
|
Параметры трассоискателей |
Абрис 12 (ТГ12 + ТМ5 (6)) |
Абрис 12 (ТГ12 + ТМ5 (6)) |
|
Максимальное удаление от генератора |
До 2 км |
До 3 км |
|
Максимальная глубина обнаружения трассы |
8 м |
12 м |
|
Максимальная глубина измерения |
6 м электронное ограничение |
|
Технические характеристики приемников «Абрис»
|
Параметры приемников |
ТМ5 (ТМ5П) |
ТМ6 |
|
Тип индикатора |
|
|
|
Используемые пассивные частоты, Гц |
50, 100, 50 + 100, радио |
|
|
Частоты при работе от генератора, Гц |
1450, 9820, заказные |
|
|
Максимальная глубина измерений |
6 м электронное ограничение |
|
|
Точность трассировки, точность измерения глубины |
3 % при глубине до 3 м, 7 % при глубине > 3 м |
|
|
Точность измерения силы тока |
10 %, ±10 см |
|
|
Синхронизация с приемником GPS |
Да (доп. опция) |
|
|
Количество одновременно принимаемых частот |
2 (режим 50 + 100) |
|
|
Источник питания приемника |
2 батареи типоразмера D |
|
1.4. Сталкер-2
Трассоискатель Сталкер-2, производства российской компании «Радио-Сервис», предназначен для определения местоположения и глубины залегания любых металлических скрытых коммуникаций (силовые и телефонные кабели, различные трубопроводы) на глубине до 7 м, определения мест повреждений кабельных линий; поиска пар проводов в сигнальных кабелях; работ по скрытой проводке; обследования участков местности перед проведением земляных работ. Трубокабелеискатель «Сталкер-2» включает в себя небольшой генератор, мощности которого хватает для трассировки трубопровода на удаление до 10 км от места первоначального подключения.
Трассоискатель Сталкер-2 имеет три рабочие частоты и регулируемую выходную мощность, что дает возможность наиболее эффективно выбирать режим работы трассоискателя, фильтровать помехи и найти повреждение. Мини-датчик, подключаемый к приемнику, делает удобной работу при отборе жил в кабеле, при работе в каналах прокладки кабелей или внутри помещений. Специальная передающая рамка обеспечивает бесконтактное подключение к коммуникациям.
Сталкер-2 имеет встроенный громкоговоритель, позволяя работать без наушников, генерируя сигнал различной громкости и частоты при изменении расстояния от проводника. Трассоискатель компактен и удобен в работе, масса приемника около 1 кг, генератора 2,0 кг.
Мини-датчик, идущий в комплекте к трас-соискателю, предназначен для поиска скрытой проводки. Применяется в двух режимах: «Обрыв» - при поиске обрывов в радиотрансляционной сети, телефонной сети и в обесточенной проводке; «Замыкание» - при поиске замыканий в жилах кабелей.
Для поиска повреждений в силовых кабелях к данному виду трассоискателей можно дополнительно заказать специальную А-рамку (емкостной зонд).
|
Точность определения трассы, м |
±0,3 |
|
Глубина, м |
До 7 |
|
Диапазон рабочих частот генератора, Гц |
526; 1024; 8928 |
|
Рабочие частоты приемника, Гц |
50 - 3000; 526; 1024; 8928 |
|
Мощность генератора, Вт |
8 - 75 |
|
Источник питания генератора |
Аккумулятор 12 В; сеть 220 В |
|
Источник питания приемника |
3 батареи типоразмера D |
|
Время работы генератора, ч |
Не менее 8 |
|
Рабочая температура, °С |
От -20° до +40° |
1.5. Альтернатива АГ-201
Трассоискатель обладает высоким быстродействием и удобен в эксплуатации, имеет возможность бесконтактного наведения сигнала в трубопроводе или обесточенном кабеле. Он предназначен для трассировки и поиска коммуникаций и определения глубины их залегания, применяется в случаях, когда не нужно разделение найденных коммуникаций по их типу, а важно просто знать, что в данной области находится некий объект коммунального хозяйства.
|
Точность определения трассы, м |
±0,3 |
|
Глубина, м |
До 5 |
|
Диапазон рабочих частот генератора, Гц |
1024; 8926 |
|
Рабочие частоты приемника, Гц |
50 - 1200; 1024; 8924 |
|
Мощность генератора, Вт |
8 |
|
Источник питания генератора |
Аккумулятор 12 В |
|
Источник питания приемника |
6 батарей типоразмера D |
|
Время работы генератора, ч |
Не менее 8 |
|
Рабочая температура, °С |
От -20° до +45° |
1.6. Успех АТГ-210
Течетрассоискатель УСПЕХ АТГ-210 - комплект, состоящий из двух приборов: течеискателя и трассоискателя. Предназначен для обнаружения подземных кабельных трасс, определения мест их повреждения (индукционным методом), обнаружения любых токопроводящих коммуникаций (водопроводные и газовые трубопроводы, канализационные) и определения их глубины залегания. Положительной особенностью трассоискателя является использование в генераторе низкой частоты (512 Гц), наводимой генератором на нужную коммуникацию в условиях густо расположенных коммуникаций, т.к. это дает наименьшие наводки на соседние трассы и облегчает поиск.
С помощью акустического датчика можно определить места утечек в трубах тепловых сетей, водопроводов и газопроводов. При поиске повреждений кабеля акустическим методом определяет места нарушения сопротивления кабелей при прожигах. При совместном использовании данного акустического датчика и генератора звуковых импульсов «Дятел» (RSP 3) появляется возможность трассировки пластиковых труб. Наличие двух режимов работы в одном приборе позволяет использовать его как для трассировки, так и для поиска утечек.
Стандартный комплект: генератор, рамка для индуктивного подключения, приемник, клещи для гальванического подключения, зарядное устройство, аккумулятор, наушники.
|
Глубина, м |
До 5 |
|
Точность определения трассы, м |
±0,3 |
|
Диапазон рабочих частот генератора, Гц |
1024; 8926 |
|
Рабочие частоты приемника, Гц |
50; 100; 1024; 8924; ШП; ФНЧ; ПФ |
|
Мощность генератора, Вт |
8 |
|
Источник питания генератора |
Аккумулятор 12 В |
|
Источник питания приемника |
6 батарей типоразмера D |
|
Время работы генератора, ч |
Не менее 8 |
|
Время работы приемника, ч |
Не менее 8 |
|
Точность определения места утечки, м |
±0,3 |
|
Рабочая температура, °С |
От -20° до +50° |
2. Трассоискатели зарубежного производства
2.1. Производитель Radiodataction
2.1.1. САТ3 & Genny3
Трассопоисковый комплект САТ3+ и Genny3+ предназначен для поиска и локализации силовых и телефонных кабелей и металлических трубопроводов на глубине от 0,1 м до 5 м. Трассопоисковый комплект может обнаружить только металлические коммуникации. Прибор имеет функцию цифрового отображения измеренной глубины на небольшом дисплее. Трассопоисковый комплект САТ3 & Genny3 создан для того, чтобы избежать неприятностей в случае повреждения подземных коммуникаций (трубопроводов или кабелей) землеройной техникой на строительной площадке. Данный тип трассоискателя разработан специально для работы в условиях сильных электромагнитных помех, имеет высокую чувствительность и помехозащищенность, уверенно работает в любых условиях.
Приемник работает в четырех режимах (Power, Radio, Genny, AvoidanceScan) и снабжен влагозащищенным динамиком с витым шнуром для использования в местах сильных шумов, имеет ударопрочное и влагозащищенное исполнение. Режимы:
Power - поиск силовых кабелей и газопровода;
Radio - поиск телефонного кабеля, по которому идет постоянный сигнал;
Genny - поиск трубопроводов, обесточенных силовых и телефонных кабелей;
AvoidanceScan - обследование местности одновременно на всех частотах, и предназначен для случаев, когда нужно быстро обследовать территорию без определения типа коммуникации. Функция позволяет одновременно работать на всех диапазонах частот - электрочастоты (Power), радиочастоты (Radio), рабочей частоте генератора Genny, что облегчает и сокращает время поиска различного рода коммуникаций в зоне поиска.
Функция StrikeAlert™ предупредит пользователя о неглубоко залегающих электрокабелях, находящихся в зоне поиска (C.A.T.3V, С.А.Т.3+).
Запатентованный метод обработки сигнала позволяет снизить уровень нежелательных электромагнитных сигналов. С помощью приемника САТ3 гораздо проще, чем ранее, работать на участках, переполненных подземными кабелями, и под ЛЭП.
Мощность генератора Genny3 0,1 Вт, способы подключения - прямое соединение и индукция. Имеет два режима подачи сигнала на коммуникацию - импульсный и непрерывный.
В сочетании с генератором Genny этот прибор позволяет решать большинство задач, связанных с поиском подземных коммуникаций в городских условиях.
|
Измерение глубины |
3 м |
|
Измерение глубины с зондами |
7 м |
|
Точность определения глубины |
5 % глубины |
|
Рабочие частоты приемника |
50 (Power); 1,500 - 30,000 (Radio) |
|
Используемый генератор |
Genny3 |
|
Рабочие частоты генератора |
32768 ± 3 Гц |
|
Мощность генератора |
0,1 Вт |
|
Количество одновременно принимаемых частот |
Опционально 3 |
|
Регулировка усиления |
Ручная, полуавтоматическая в режиме пассивных частот |
|
Режим максимум |
Да |
|
Режим минимум |
Нет |
|
Работа с одной горизонтальной антенной |
Нет |
|
Измерение глубины |
Методом 45° (C.A.T.3, C.A.T.3V)/ цифровое (С.А.Т.3+) |
|
Глубина, м |
До 5 |
|
Мощность генератора, Вт |
од |
|
Источник питания генератора |
4 батареи типоразмера D, до 30 ч |
|
Источник питания приемника |
2 батареи типоразмера D, до 40 ч |
|
Защита от воды и пыли |
IP54 |
|
Специальные принадлежности |
Индуктивные клещи, миниатюрный передатчик типа «зонд» для трассировки неметаллических трубопроводов, flexitrace - гибкий стержень для проталкивания передатчика типа «зонд» |
|
Рабочая температура, °С |
от -20 °С до +50 °С |
2.1.2. RD2000
В приборах серии RD 2000 сохранены все лучшие достижения линейки C.A.T.&Genny и добавлены новые особенности.
Характерные особенности:
жидкокристаллический дисплей;
функция автоматического цифрового определения глубины;
технология обработки сигнала, исключающая помехи от переотражения сигнала и наводки от близко расположенных электрических кабелей.
Модификации:
RD2000+ - базовая модель, предназначенная для обнаружения самых разнообразных коммуникаций;
RD2000S - локатор для точного определения положения труб из чугуна, бетона и пластика с помощью специальных зондов;
RD2000CPS - локатор для обнаружения металлических электропроводящих труб различного диаметра и труб с катодной защитой.
|
Показатель |
RD2000+ |
RD2000S |
RD2000CPS |
|
Частоты |
|||
|
Используемый генератор |
Т1 |
||
|
Принимаемые пассивные частоты |
Электросеть 50 |
Электросеть 50 Гц |
Радиочастоты |
|
Радиочастоты |
15000 - 30000 Гц |
||
|
15000 - 30000 Гц |
Электросеть 50 |
||
|
Принимаемые активные частоты |
Одна из 640, 8192, 32768 Гц |
||
|
Прием на частоте катодной защиты |
Нет |
Да |
|
|
Возможность работы с зондами |
Только на частоте 32768 Гц |
Работает только с зондами на всех активных частотах |
Нет |
|
Режимы работы |
|||
|
Регулировка усиления |
Ручная, полуавтоматическая |
||
|
Измерение глубины |
Цифровое, автоматическое |
||
|
Измерение глубины |
3 (со спецфондами) 7 м |
3 м |
|
|
Поиск утечек |
Нет |
|
|
|
Измерение глубины с зондами |
7 м |
- |
|
|
Точность |
|||
|
Точность определения глубины |
5 % |
||
|
Питание |
|
||
|
Батареи |
2 батареи типа D |
||
|
Время работы |
До 40 ч при 20 °С |
||
|
Дополнительно |
|||
|
Индикация |
ЖК и звуковая |
||
|
Особенности |
Опционально функция StrikeAlert |
||
|
Физические характеристики |
|
||
|
Размеры |
720×255×65 мм |
||
|
Масса |
2,2 кг |
||
|
Пыле- влагозащищенность |
IP54 |
||
|
Рабочие температуры |
От -20 °С до +55 °С |
||
2.1.3. RD4000
Широкий набор частот зондирования и дополнительные опции для приборов серии RD4000 позволяют находить и трассировать любые трубы и кабели. Одной из особенностей, которой обладают приемники этой серии, является то, что на выход подается «реальный», а не синтезированный звук.
Приемники PXL и PDL производятся и в модификации MRx - с возможностью поиска специальных маркеров, закладываемых при прокладке пластиковых труб. Имеется возможность использовать подводный вариант антенны. Кроме этого, существует множество различных дополнительных приспособлений, облегчающих поиск и слежение трассы.
Все приемники этой серии имеют разъем RS232 для связи с компьютером и навигационным устройством.
|
Показатель |
RD4000 SL |
RD4000 PXL |
RD4000 PDL |
|
Частоты |
|||
|
Используемый генератор |
RD4000T3, RD3000T10 |
RD4000T3, |
|
|
RD4000T3F, |
|||
|
RD3000T10 |
|||
|
Принимаемые пассивные частоты |
Электросеть 40 - 700, радиочастоты 14000 - 26000 Гц |
||
|
Принимаемые активные частоты |
Одна из 8192, 32768, 65536 Гц |
До 4 из диапазона 8000 - 200000 Гц |
|
|
Принимаемые низкие частоты |
Нет |
640 Гц |
|
|
Прием на частоте катодной защиты |
Нет |
Да |
|
|
Количество одновременно принимаемых частот |
1 |
||
|
Режимы работы |
|||
|
Работа с маркерами |
Нет |
В модификациях MRX |
|
|
Регулировка усиления |
Полуавтоматическая |
||
|
Режим максимум |
Да |
||
|
Режим минимум |
Нет |
Да |
|
|
Работа с одной горизонтальной антенной |
Нет |
Да |
|
|
Измерение глубины |
Цифровое |
||
|
Измерение направления тока |
Нет |
1024 Гц (Current Direction) |
|
|
Измерение силы тока |
Нет |
Д |
а |
|
Измерение глубины |
5 м |
||
|
Поиск утечек |
Нет |
8 и 8192 Гц с А-рамкой |
|
|
Измерение глубины с зондами |
8 м |
||
|
Точность |
|||
|
Точность определения глубины |
5 % до 3 м, 10 % до 8 м |
||
|
Питание |
|
||
|
Батареи |
4 батареи типа D |
||
|
Время работы |
До 16 ч при 20 °С |
||
|
Дополнительно |
|
||
|
Соединение с GPS |
По RS232 |
||
|
Работа с наушниками |
Да |
||
|
Особенности |
Подводная антенна, гибкий прут для тонких труб (flexiTrace) |
||
|
Физические характеристики |
|||
|
Размеры |
690×280×123 мм |
||
|
Масса |
2,8 кг |
||
|
Пыле- влагозащищенность |
IP54 |
||
|
Рабочие температуры |
от -20 °С до +50 °С |
||
2.2. Производитель 3М, серия Dynatel
2.2.1. Dynatel 2210 (3М)
Цифровой трассопоисковый приемник фирмы 3М предназначен для обследования местности на наличие скрытых силовых кабелей и трубопроводов и имеет наибольшее количество функций для прибора такого класса.
Прибор снабжен большим информативным дисплеем, где наряду с классическим шкаловым индикатором отображаются цифрой эквивалент интенсивности электромагнитного поля, глубина залегания коммуникации и сила наведенного поля. Вторым характерным отличием является возможность поиска коммуникации не только по максимальному сигналу, но и по глубинному минимому, дающему возможность уточнить искомое местоположение. Сочетание этих возможностей делает поиск более быстрым и уверенным.
Наличие у генератора низкой активной частоты (577 Гц) и более высокой мощности - 3 Вт дает возможность, при прямом подсоединении, избежать наводок на соседние коммуникации и позволяет сигналу распространяться на большее расстояние, чем у аналогов.
Особенности трассопоискового комплекта Dynatel 2210:
два режима поиска: по максимуму сигнала и по цифровому глубинному минимуму;
отображение на дисплее в условных единицах силы электромагнитного поля от проводника для более простого поиска;
наличие в комплекте круглых индукционных клещей;
поиск телефонного кабеля, определение глубины залегания силового и телефонного кабелей без использования генератора;
две активные частоты генератора, наличие низкой частоты для насыщенных коммуникациями районов;
две пассивные частоты поиска;
поиск кабеля или пары в пучке;
режим выходной мощности 3 Вт.
|
Глубина обнаружения трассы, м |
4,5 |
|
Точность определения трассы, % глубины |
±5 |
|
Принимаемые частоты: |
|
|
активные |
577 Гц, 33 кГц |
|
пассивные |
50/60 Гц, 22 кГц |
|
Выходная мощность, Вт |
3 |
|
Время работы приемника, ч |
До 30 |
|
Время работы генератора, ч |
До 50 |
|
Дополнительные принадлежности |
Передающие клещи; приставка - маркероискатель Dynatel 2206; маркеры (шаровые и дисковые, для силовых линий и линий связи) |
|
Рабочая температура, °С |
-20 ... +50 |
2.2.2. Dynatel 2250М (3М)
(Dynatel™ 2250М трассоискатель, Dynatel™ 2250МЕ-1D трассомаркероповреждениеискатель).
Серия Dynatel 2250М предназначена для поиска металлических трубопроводов всех типов и различного вида кабельных линий, проложенных под землей. Эта серия укомплектована круглыми индукционными клещами «Dyna-Coupler» увеличенного диаметра для подачи сигнала от генератора в коммуникацию, когда нежелательно или невозможно непосредственное подсоединение генератора к трассируемой линии (силовой или телефонный кабель, труба небольшого диаметра). Специально для поиска пластиковых труб, оптоволоконных кабелей и различных объектов подземных коммуникаций, рядом с которыми были заложены специальные устройства - маркеры, разработана модель Dynatel 2250M-iD/E.
Трассоискатель Dynatel 2250M-EU обладает патентованной системой из четырех (а не трех, как у других производителей) поисковых антенн, что выделяет его, по показателям результатов поиска, среди группы профессиональных приборов.
Благодаря разнесению одной из продольных поисковых антенн на две составляющие инженеры компании 3М добились более простого и точного наведения на трассу. При этом каждая из полуантенн отвечает за одну из сторон (левую и правую). Стрелки-указатели, индицируемые на дисплее, показывают направление ближайшей коммуникации, расположенной параллельно рукоятке приемника, а цифровое отображение электромагнитного поля значительно облегчает поиск. Возможность цифрового измерения глубины залегания и силы наведенного тока дает возможность идентификации близко расположенных или пересекающихся коммуникаций.
Следующим шагом в улучшении поисковых характеристик стало разделение режима поиска силового кабеля на два подрежима: поиск на 9-й и 5-й гармониках промышленной частоты. Использование 9-й гармоники частоты 50 Гц особенно удобно для поиска трехфазных силовых кабелей. В линиях трехфазного кабеля основные частоты обычно компенсируются, но сигнал частоты 9-й гармоники увеличивается, обеспечивая наличие сильного сигнала вдоль трассы кабеля, поэтому 9-я гармоника наиболее удобна в большинстве случаев поиска на промышленной частоте, но если уровень сигнала слаб или прерывист, применение 5-й более эффективно.
Помимо поиска силового кабеля трассоискатели Dynatel имеют возможность искать отдельно газопровод и телефонный кабель на специально выделенных частотах. Наличие в приборе режимов для раздельного поиска силового, телефонного кабелей и газопровода облегчает их поиск, когда на обследуемой территории нет возможности использовать генератор, а данные коммуникации нужно не только найти, но и определить их тип.
Трассоискатели Dynatel™ 2250ME-iD, а также маркероискатель Dynatel™ 1420 ЕМС способны работать с GPS-приемниками в режиме реального времени и записывать в маркер координаты или заносить данные о маркерах в электронные карты GPS-приемников с последующей обработкой на ПК.
Особенности трассопоискового комплекта Dynatel 2250М:
высокая точность определения местоположения коммуникации благодаря четырем разнесенным датчикам;
пять режимов поиска: максимум, широкий максимум, ноль, инверсионный ноль, разность сигналов;
имеется специальный пиковый режим, при котором чувствительность приемника усиливается, что необходимо для продолжения трассировки при слабом уровне сигнала (2250МЕ);
поиск мест повреждений оболочки кабелей (кроме моделей 2250МЕ и 2250ME-1D);
возможность раздельного поиска газопровода и силового кабеля;
поиск телефонного кабеля, определение глубины залегания силового и телефонного кабелей без использования генератора;
четыре активные частоты генератора, наличие низкой частоты для насыщенных коммуникациями районов;
три пассивные частоты поиска для поиска силового кабеля, телефонного кабеля и газопровода;
режим непрерывного измерения глубины;
встроенный вольтметр/омметр;
измерение относительной величины тока в проводнике для его идентификации среди коммуникаций с наведенным сигналом той же частоты;
подключение к кабелю (не обесточивая его) индукционным способом через круглые индукционные клещи;
режим обнаружения любых двух типов маркеров (в том числе других производителей).
|
Глубина обнаружения трассы, м |
9 |
|
Точность определения трассы, % глубины |
±5 |
|
Диапазон рабочих частот генератора |
577 Гц, 8 кГц, 33 кГц, 133 кГц |
|
Рабочие частоты приемника |
50 Гц, 100 Гц, РАДИО, 577 Гц, 8 кГц, 33 кГц, 133 кГц |
|
Мощность генератора, Вт |
3 или 5 от внешнего аккумулятора |
|
Время работы приемника, ч |
До 30 |
|
Время работы генератора, ч |
До 50 |
|
Дополнительные принадлежности |
Передающие клещи; приставка - маркероискатель Dynatel 2206; маркеры (шаровые и дисковые, для силовых линий и линий связи) |
|
Рабочая температура, °С |
-20 ... +50 |
2.2.3. Dynatel 2273М
(Dynatel™ 2273М трассоповреждениеискатель, Dynatel™ 2273M-ID/EU трассомаркероповреждениеискатель).
Данный комплект предназначен для обеспечения поиска металлических трубопроводов всех типов и различного вида кабельных линий, проложенных под землей. Это максимально универсальный прибор в своем классе. При нахождении маркера ID типа показывает записанную в него информацию (тип коммуникации, глубину заделки, дату и т.д.) и запоминает ее во встроенную память для последующей передачи на компьютер.
Для поиска повреждений в изоляции трубопровода или оболочке кабеля существует модификация с рамкой - щупом - Dynatel 2273М-EU. Трассоискатель Dynatel 2273M-iD/EU обладает патентованной системой из четырех (а не трех, как у других) поисковых антенн.
Реализуемый в приборе контактный метод позволяет с высокой точностью определить место нарушения изоляции. Если в исследуемую коммуникацию подать специальный низкочастотный сигнал, то в местах нарушения изоляции появятся токи утечек. Для их обнаружения трассоискатель комплектуется контактным щупом (А-рамкой), который позволяет измерять шаговое напряжение вдоль трассы. Пользователь, перемещаясь вдоль трассы, периодически касается контактами А-рамки земли, регистрируя шаговое напряжение на дисплее приемника. Непосредственно над местом повреждения изоляции шаговое напряжение будет максимальным.
При поиске повреждений в Dynatel 2273М-iD/EU используется сигнал частоты в 10 Гц, близкий по своим характеристикам к сигналу постоянного тока. Такая частота позволяет избежать естественного затухания сигнала, т.е. потерь сигнала, которые происходят вследствие емкостной составляющей, поэтому практически все потери сигнала происходят из-за повреждений изоляции или электрического контакта с другими металлическими структурами.
Особенности трассомаркеродефектоискателя Dynatel 2273М:
все возможности 2250М;
функция поиска повреждений «экран-земля» (Dynatel 2273M-iD/EU);
стандартная комплектация А-антенной (Dynatel 2273M-iD/EU);
поиск трассы, маркеров и повреждений одним прибором (Dynatel 2273M-iD/EU).
|
Глубина поиска, м |
До 9 |
|
Точность определения трассы, % глубины |
±5 |
|
Диапазон рабочих частот генератора |
10 Гц, 577 Гц, 8 кГц, 33 кГц , 133 кГц |
|
Рабочие частоты приемника |
10 Гц, 50 Гц, 100 Гц, РАДИО, 577 Гц, 8 кГц, 33 кГц , 133 кГц |
|
Мощность генератора, Вт |
5 |
|
Питание генератора |
6 шт. батарей типоразмера С |
|
Питание приемника |
8 шт. батарей типоразмера АА |
|
Время работы приемника, ч |
До 30 |
|
Время работы генератора, ч |
До 50 |
|
Рабочая температура, °С |
-20 ... +50 |
2.3. SR-20 SeeTech (производитель Ridgid)
SR-20 обладает методом кругового наведения на протяженный объект, расположенный под землей. Данная технология позволяет отображать на экране прибора не простые стрелки-указатели, а наглядную схему расположения коммуникаций и называется «система картографического отображения». Благодаря этой технологии больше не нужно ходить зигзагами по исследуемой территории, теперь оператору нужно только нажать на кнопку питания и выбрать тип нужной коммуникации, а прибор сам ее найдет, изобразив на дисплее независимо от ориентации пользователя относительно подземной трассы.
Измерение глубины залегания, бесконтактное определение значения наведенного тока и силы электромагнитного поля, идущего от коммуникации, усиление и ослабление силы принимаемого сигнала проводятся автоматически и отображаются на дисплее в режиме реального времени, избавляя пользователя от лишних манипуляций с прибором.
Все это стало возможным благодаря использованию восьми поисковых антенн. Применение не стандартных прямых антенн, а специальных - сферических - позволило создателям SR-20 реализовать передовую технологию.
Профессиональная модель трассопоискового приемника SR-20 обладает возможностью поиска в пассивном режиме всех основных металлических коммуникаций, по которым уже проходит электромагнитный сигнал: силовой кабель, трубопровод с катодной защитой, телефонный кабель. При использовании специального широкополосного режима на дисплее отображается несколько лежащих рядом коммуникаций одновременно, при этом существует возможность определения типа этой коммуникации. В случае, когда исследуемая коммуникация пересекается другой, на дисплее отображается место их пересечения.
Поиск коммуникаций, на которых нет электромагнитного поля (обесточенные кабели, трубопроводы, канализации и т.п.), осуществляется с использованием специальных устройств - генераторов.
В ситуациях, когда важна большая дальность трассировки и искомые коммуникации лежат на глубинах не более 2 м, а возможности подсоединиться к ним напрямую нет, то подать сигнал в коммуникацию с поверхности земли можно, используя генератор ST-33Q.
Программное обеспечение приемника SR-20 и генератора ST-33Q позволяет настраиваться на любые поисковые частоты в интервале от 1 Гц до 33 кГц без дополнительного перепрошивания.
Для обследования неметаллических коммуникаций, в которых есть ток воды и к которым есть непосредственный доступ, применяются водонепроницаемые плавающие зонды-передатчики. Зонд помещается внутрь коммуникации и под действием тока воды движется по ней. Его перемещение отслеживается с поверхности земли с помощью трассопоискового приемника SR-20.
Также трассоискатель имеет возможность работы с системами видеодиагностики внутреннего состояния коммуникаций SeeSnake.
Особенности трассопоискового комплекта SR-20 SeekTech:
самое большое количество поисковых антенн, дающих точное местоположение всех коммуникаций вблизи прибора;
одновременное использование всех поисковых режимов;
большой выбор поисковых частот генератора;
одновременное отображение на дисплее нескольких коммуникаций, отображение пересекающихся коммуникаций;
графическое наведение на коммуникацию;
возможность задания своих поисковых частот без дополнительного перепрограммирования;
возможность раздельного поиска газопровода и силового кабеля;
поиск телефонного кабеля без использования генератора;
цифровое измерение глубины залегания коммуникаций;
четыре активные частоты генератора, наличие низкой частоты для насыщенных коммуникациями районов;
три пассивные частоты поиска;
отображение на дисплее в реальном времени значений глубины и силы наведенного тока;
отображение на дисплее в условных единицах силы электромагнитного поля от проводника для более простого поиска;
отображение на дисплее угла, на который необходимо повернуть прибор, чтобы попасть точно на коммуникацию;
возможность поиска неметаллических коммуникаций по сигналу от зондов систем видеодиагностики и миниатюрных сигнальных датчиков;
возможность подачи сигнала в силовой кабель без его отключения с помощью индукционных клещей.
|
Глубина, м |
До 10 |
|
Точность определения трассы, % |
5 % глубины |
|
Возможность поиска маркеров |
- |
|
Возможность поиска повреждения изоляции |
- |
|
Время работы генератора, ч |
До 13 |
|
Время работы приемника, ч |
До 15 |
|
Диапазон рабочих частот генератора, Гц |
128, 1000, 8000, 33000, 93000 (только в генераторе ST-33Q) |
|
Рабочие частоты приемника |
50 Гц, 100 Гц, РАДИО, 128 Гц, 1 кГц, 8 кГц, 33 кГц, широкая полоса, мультичастотный режим |
|
Мощность генератора, Вт |
10 или 5 |
|
Питание генератора |
8 шт. батарей типоразмера В |
|
Питание приемника |
4 шт. батарей типоразмера С |
|
Рабочая температура, °С |
-20° ... +50° |
Плавающий датчик для поиска неметаллических коммуникаций
Для нахождения пластиковых и керамических коммуникаций используется специальный плавающий датчик FLOAT SONDS, помещаемый непосредственно в коммуникацию. Перемещение датчика отслеживается приемником RIDGID.
2.4. Производитель Seba KTM
2.4.1. Arrow
Три частотных диапазона:
«Р» - поиск трассы в диапазоне промышленной частоты 50 Гц (энергетические кабели);
«RF» - поиск трассы в диапазоне сверхдлинных волн (радио);
«А» - поиск трассы в активном диапазоне.
Описанные выше методы локации называются «пассивными», так как для поиска трассы используются проходящие по трассе собственные и паразитные токи. Однако трубопроводы таким образом найти практически невозможно. В этом случае необходимо использовать передатчик поисковой частоты 35 кГц, который подает в трубопровод ток собственной частоты. Генератор ARROW может подключаться гальваническим методом и индуктивно через передающие клещи или встроенную антенну.
2.4.2. Easyloc
Преимущества:
на дисплее приемника EASYLOC отображается уровень принимаемого сигнала и маркером отмечается его максимальная мощность;
приемник предупреждает оператора о потенциально опасных силовых кабелях;
активная частота подключения - 33 кГц, что позволяет использовать генераторы сторонних производителей;
возможность эксплуатации от сети;
автоматический контроль заряда батареи;
три различных режима работы позволяют с большой достоверностью определять место прохождения металлических проводников, кабелей и труб;
визуальная и звуковая сигнализация;
высококонтрастный жидкокристаллический экран с подсветкой;
определение глубины залегания проводника и автоматическое усиление чувствительности;
работа в активном режиме;
работа в пассивном режиме благодаря возможности использования тока сети или сверхдлинных волн.
Дополнительно передатчик Easyloc S можно использовать для поиска металлических предметов на глубине до 20 см и крышек колодцев на глубине до 45 см.
2.4.3. FM 9860 XT (9890 XT)
Возможности трассоискателя:
автоматическое определение оптимальной поисковой частоты;
информация от омметра о подсоединениях;
система визуального и акустического оповещения;
система определения направления трассы;
полностью автоматическая непрерывная регулировка усиления сигнала;
измерение тока для точного определения параллельно проложенных трасс и для обнаружения ответвлений;
автоматическое, плавное согласование генератора;
трехчастотный диапазон; запатентованная система определения направления трассы;
полностью автоматическая непрерывная регулировка усиления сигнала;
цифровая индикация глубины залегания;
наличие двух пассивных и трех активных поисковых частот;
интеллектуальная система управления генератором и приемником с акустическими и визуальными сигналами оповещения;
три частотных диапазона для локации трассы.
Благодаря трем частотным диапазонам можно различать энергетические кабели и другие коммуникации. Активный частотный диапазон позволяет пользователю произвести настройку параметров, таких как передающие частоты и выходная мощность, к конкретной ситуации и благодаря этому получать оптимальные результаты локации. При использовании пассивных частотных диапазонов можно обнаружить кабели и металлические трубопроводы без применения генератора, и они идеально подходят для зондирования почвы с целью предотвращения случайных повреждений при земляных работах. Использование всех трех частотных диапазонов дает точные результаты при локации трасс.
Трассоискатель FM 9800 позволяет одновременно с глубиной залегания кабеля определять и ток, проходящий по проводнику. Обычные трассопоисковые приборы определяют только напряженность электромагнитного поля над проводником. Так как напряженность поля во многом зависит от глубины, то можно получить неправильные результаты при параллельно проходящих кабелях на разной глубине. Измерение тока позволяет различить параллельно проложенные трассы, а также обнаружить ответвление кабелей.
2.4.4. Ferrolux FL10
Основным отличием нового трассоискателя FL10 является возможность работать в диапазоне звуковых частот, что позволяет в значительной степени увеличить дальность и точность работы.
Трассоискатель FL10 имеет четыре частотных диапазона работы, которые могут быть использованы как для пассивного метода локации (без прямого подключения к трассе), так и для активного метода при использовании генераторов частот, таких как FLG10, FLG50.
Методы поиска трасс, используемые в FL10:
обычный метод по минимуму и максимуму сигнала;
метод SuperMax;
SignalSelect;
определение положения скрутки магнитного поля;
выбор кабеля из пучка (опция);
определение местоположения повреждения оболочки (опция);
измерение глубины (цифровой и методом 45 градусов);
определение мест повреждения (опция).
SignalSelect
Патентованный метод обнаружения направления сигнала на линии, который назван SignalSelect, заметно расширяет надежность и эффективность в определении местоположения трассы. Этот метод позволяет работать в таких местах, где различные трассы расположены параллельно и на близких расстояниях. Генератор FLG10 генерирует сигнал звуковой частоты со специальным кодированием, которое подается в трассу, используя прямое или индуктивное подсоединение. Приемник FLE10/FS10 выделяет этот сигнал над трассой и определяет положения.

SuperMax
Метод поиска по минимуму или максимуму сигнала, применяемый в обычных трассоискателях, может давать достаточно грубые результаты. Метод «максимум» имеет очень хороший прием над трассой, но и также достаточно большой диапазон поиска. Метод минимума позволяет достаточно точно определить положение трассы, но имеет очень сильный сигнал справа и слева.
Благодаря специальной связи в использовании традиционных методов максимума и минимума в новой системе Ferrolux FLE10 реализовано новое решение поиска по методу максимума, при этом пользователь может достаточно точно определить положение трассы, не имея при этом вредного сигнала рядом с трассой.

Особенности генератора Ferrolux FLG10:
автоматическое согласование полного сопротивления;
современные NiMh аккумуляторы;
зарядка аккумулятора в течение 3,5 ч;
RS232 интерфейс для обслуживания и управления генератором при помощи компьютера.
Также в качестве генератора могут быть использованы следующие модели:
Ferrolux FLG50, FM 9890-S (982/9820 Гц).
Трассоискатели Seba - сравнительные характеристики
|
Технические данные |
Anow |
Easyloc |
FM 9860 (FM 9890) |
Ferrolux FL |
|
Приемник |
||||
|
Рабочие частоты: |
|
|
|
|
|
активные, кГц |
35 |
39,2 |
9,82/82 |
0,491/0,982/9820 |
|
(0,982/9,82/82) |
||||
|
пассивные |
50/60 Гц, |
50/60 Гц, |
50/60 Гц, |
50/60 Гц, |
|
12 - 22 кГц |
15 - 23 кГц |
14 - 22 кГц |
100/120 Гц |
|
|
Питание |
10×1,5 В (АА) |
10×l,5 B (LR6) |
6×1,5 В (АА) |
4×1,5 B (LR6) |
|
Время работы, ч |
60 |
80 |
30 |
20 |
|
Габаритные размеры, мм |
500×250×70 |
720×204×162 |
686×178×229 |
220×100×110 |
|
Масса, кг |
2,2 |
2,6 |
2,35 |
1,5 |
|
Исполнение |
Моноблок |
Моноблок |
Моноблок |
Раздельное |
|
Максимальная глубина, м |
4 |
4 |
6 |
5 |
|
Метод определения глубины |
Косвенный |
Косвенный автомат. |
Прямой |
Прямой/косвенный |
|
Сервисные функции приемника |
||||
|
Система наведения на трассу |
Нет |
Нет |
Есть |
Есть |
|
Измерение тока в линии |
Нет |
Нет |
Есть |
Есть |
|
Метод «СуперМаксимум» |
Нет |
Нет |
Нет |
Есть |
|
Определение направления сигнала |
Нет |
Нет |
Нет |
Есть |
|
Генератор |
||||
|
Рабочие частоты, кГц |
35 |
39,2 |
9,82/82 |
0,491/0,982/9,82 |
|
(0,982/9,82/82) |
||||
|
Мощность, Вт |
0,5 |
0,6 |
3 |
10(50, 200)* |
|
Питание |
6×1,5 В |
10×1,5 В |
10×1,5 В |
12 В/4Ач |
|
(D/LR6) |
(LR20) |
(LR20) |
(NiMh) |
|
|
Время работы, ч |
|
140 |
70 |
3 |
|
Согласование с нагрузкой |
Автомат. |
Автомат. |
Автомат. |
Автомат. |
|
Габаритные размеры, мм |
276×230×156 |
260×255×140 |
362×235×133 |
250×120×170 |
|
Масса, кг |
2,5 |
1,7 |
4 |
2,9 |
|
Сервисные функции генератора |
||||
|
Одновременная передача всех частот |
- |
- |
Есть |
Есть |
|
Измерение |
Нет |
Нет |
Сопротивление |
Сопротивление, ток, напряжение, угол фазы |
|
Контроль изоляции |
Нет |
Нет |
Опция |
Опция |
|
Другие функции |
- |
Металлоискатель |
- |
Связь с ПК |
|
Рабочая температура, °С |
-20 ... +50 |
-25 ... +55 |
-20 ... +50 |
-10 ... +55 |
|
____________ * - Генераторы мощностью 50 и 200 Вт поставляются по отдельному заказу. Характеристики представлены для генератора мощностью 10 Вт. |
||||
2.4.5. Metrotech i5000
Многочастотная трассопоисковая система Metrotech i5000 предназначена для определения местоположения и глубины залегания электрических, связных кабелей и трубопроводов.
Генератор i5000 способен подавать в искомую линию до трех частот одновременно, благодаря чему нет необходимости переключать частоту генератора при поиске трассы. Генератор проводит измерения выходной мощности, тока, напряжения и сопротивления в линии и отображает измеренные значения на дисплее.
Приемник i5000 использует направляющую катушку переднего обзора (Guidance Coil), которая используется для указания направления коммуникации и совместно с функцией Distortion Alert (предупреждение об искаженном сигнале) предупреждает об изгибах и Т-образных ответвлениях в трассе. Использование функции Signal Select (выбор сигнала) дает усовершенствованную возможность определения кабеля и направления сигнала в нем.
|
Частоты |
|
|
Используемый генератор |
i5000 |
|
Принимаемые пассивные частоты, Гц |
50, 100, 14000 - 21000 (радиочастоты) |
|
Принимаемые активные частоты, Гц |
491, 982, 8440, 9820, 35000, 82000 |
|
Принимаемые низкие частоты, Гц |
491, 982 |
|
Прием на частоте катодной защиты |
Есть |
|
Количество одновременно принимаемых частот |
1 |
|
Режимы работы |
|
|
Регулировка усиления |
Ручная, автоматическая |
|
Режим максимум |
Да |
|
Режим минимум |
Да |
|
Работа с одной горизонтальной антенной |
Нет |
|
Измерение глубины |
Цифровое |
|
Измерение направления тока |
Signal Select |
|
Измерение силы тока |
Да + измерение угла фазы |
|
Измерение глубины |
Только активные частоты 6 м |
|
Поиск утечек |
Есть с А-рамкой |
|
Измерение глубины с зондами |
6 |
|
Точность |
|
|
Точность определения глубины |
10 % глубины |
|
Питание |
|
|
Батареи |
Li-Ion аккумулятор |
|
Время работы, ч |
30, непрерывной работы |
|
Дополнительно |
|
|
Соединение с GPS |
RS232, Bluetooth |
|
Индикация |
Цветной ЖК и звук |
|
I/O порт |
Bluetooth |
|
Особенности |
Signal Select, Guidance Coil, Distortion Alert |
|
Физические характеристики |
|
|
Размеры, мм |
210×337×743 |
|
Масса, кг |
2,2 |
|
Рабочие температуры, °С |
-20 ... +50 |
2.5. Leica Digicat200
Комплект из локатора и генератора Digitex 8/33: кабелеискатель, трассировка труб, кабелей.
Преимущества системы в целом:
цифровая обработка сигнала уменьшает возможность возникновения ошибок в определении местоположения коммуникации;
простота в использовании - необходим минимальный тренинг персонала.
Для поиска керамических, пластиковых, бетонных, деревянных и других неметаллических коммуникаций используется трассировщик коммуникаций Digitrace с проводом длиной 30, 50 или 80 м.
Технические характеристики Digicat200
|
Описание |
Детали |
|
Глубина поиска |
Режим поиска силовых кабелей - до 3 м. Режим поиска кабелей связи - до 2 м. Активный поиск (с использованием генератора) - до 3 м |
|
Точность |
10 % глубины |
|
Частоты принимаемых сигналов |
Режим поиска силовых кабелей - 50 - 60 кГц. Режим поиска кабелей связи - 15 - 30 кГц. Активный поиск - 8,192 (8) кГц или 32,768 (33) кГц |
|
Расстояние поиска вдоль коммуникации |
Пассивный режим поиска - длина кабеля. Активный поиск (с использованием генератора) - в зависимости от генератора |
|
Герметичность |
Соответствует IP57 |
|
Срок службы батареек, ч |
40 |
|
Температурный диапазон работы, °С |
-20 ... +50 |
|
Доп. опции (Leica Digicat200) |
Возможность беспроводной передачи данных в ГИС-системы |
2.6. Портативный (ручной) трассоискатель (кабелеискатель) ЕВ 950 VLF немецкой фирмы «Ebinger»
Принцип действия прибора основан на регистрации магнитного поля наведенных токов от поля ОНЧ частот (пассивный метод) различных индустриальных помех. Частоты поиска - до 60 кГц. Возможность поиска любых металлических подземных коммуникаций, а не только действующих кабелей. Источник питания - батарея 9В или NiMH аккумулятор 9В (270 мАч). Время непрерывной работы от батареи - 25 ч, от аккумулятора -12 ч. Вес ручного зонда - 400 г, длина - 400 мм.
Приложение 2
ОПИСАНИЯ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РАЗЛИЧНЫХ МОДЕЛЕЙ ГЕОРАДАРОВ
1. Георадары российского производства
1.1. Георадары серии «ТР-ГЕО» производства ООО «Геологоразведка»
1.1.2. Георадары «ТР-ТЕО-01-08» (раскладной), «ТР-ГЕО-АДС-М-3» (дорожный)
Георадары «ТР-ГЕО-01-08», «ТР-ГЕО-АДС-М-3» - среднечастотные видеоимпульсные георадары для зондирования различных объектов в грунте с низким и умеренным затуханием радиоволн. Предназначены для обнаружения любых неоднородностей - как металлических, так и диэлектрических, имеющих достаточно большие размеры. Выпускаются в двух модификациях: «ТР-ГЕО-01-08» - радар для работы вручную (имеет удобный раскладной антенный блок) и «ТР-ГЕО-АДС-М-3» - радар, устанавливаемый на автолабораторию, предназначенный для сканирования с большой скоростью, до 30 - 40 км/ч.
Радары предназначены для обнаружения и зондирования:
карстовых полостей, больших валунов;
границ водных линз, плывунов, аллювиальных врезов, трещиноватых зон в скальном массиве;
различных металлических и диэлектрических объектов, имеющих размер не менее чем около 0,3 - 0,5 м, кабелей, труб;
полостей и увлажненных зон под дорожным асфальтовым покрытием.
Глубина обнаружения коммуникаций:
в сухом песчаном грунте, в скальном грунте, в замерзшем грунте до 8 - 10 м;
во влажном песчаном грунте до 3,5 - 5 м;
в суглинке с низкой влажностью до 1,5 - 2,5 м.
1.1.3. Георадар «ТР-ГЕО-04-АДС» (дорожный, высокочастотный)
Георадар «ТР-ГЕО-04-АДС» - высокочастотный георадар (средняя частота спектра 2 - 2,5 ГГц), предназначенный для зондирования автодорожного покрытия с автолаборатории. Предназначен для определения толщины слоев дорожной одежды, для поиска дефектов дорожного покрытия, зон разуплотнения и увлажнения грунта под дорожным покрытием, для поиска неглубоко расположенных подземных коммуникаций. Обеспечивает высокую разрешающую способность зондирования (до 1 - 3 см) слоев дорожного покрытия и верхнего слоя грунта до глубины 70 см. Позволяет проводить сканирование с высокой скоростью - до 30 - 40 км/ч.
1.2. Георадары «ОКО»
Георадар серии «ОКО» - цифровой одноканальный, портативный, переносимый одним оператором радар подповерхностного зондирования.
Назначение
Георадары предназначаются для обнаружения в грунте, под водой, в насыпных грузах и в других средах различных предметов, неоднородностей, в том числе трубопроводов, карстовых пустот и промоин в железнодорожном и автомобильном полотне, неоднородностей структуры грунта и т.п. Георадары могут быть использованы при проведении археологических работ, строительных и ремонтных работ, поиске криминальных и контрабандных захоронений и т.п.
Антенный блок (АБ) включает в свой состав приемо-передающие антенны, передающие и приемные устройства и системы обработки информации. Тип антенного блока определяет глубину зондирования и разрешающую способность георадара. Георадар может комплектоваться несколькими антенными блоками для выполнения разных задач.
Поставляемое с георадаром программное обеспечение позволяет использовать разнообразные методы математической обработки и разные формы визуализации георадиолокационной информации. Возможно применение различных типов фильтрации и спектрального анализа.
|
Тип георадара |
Антенные блоки |
Характеристики георадара |
||||
|
Центральная частота, МГц |
Глубина зондирования, м |
Разрешающая способность, м |
Масса комплекта/(АБ), кг |
Потребляемая мощность, Вт |
||
|
«Око-М1Д» |
АБД-25 |
25 |
20 - 30 |
2,0 |
12,0/(6,0) |
8,0 |
|
АБД-50 |
50 |
15 - 20 |
1,0 |
11,0/(5,0) |
8,0 |
|
|
АБД-100 |
100 |
10 - 15 |
0,5 |
10,0/(4,0) |
8,0 |
|
|
«Око-М1» |
АБ-150 |
150 |
6 - 12 |
0,35 |
20,0/(15) |
7,0 |
|
АБ-250 |
250 |
4 - 8 |
0,25 |
14,0/(8,0) |
7,0 |
|
|
АБ-400 |
400 |
2,0 - 5,0 |
0,15 |
8,5/(2,5) |
6,0 |
|
|
«Око-М» |
АБ-500 |
500 |
1,5 - 4,0 |
0,12 |
5,5/1,55 |
5,0 |
|
АБ-700 |
700 |
1,0 - 3,0 |
0,1 |
4,5/1,25 |
5,0 |
|
|
АБ-1200 |
1200 |
0,3 - 0,8 |
0,05 |
3,75/(0,5) |
5,0 |
|
Дополнительно могут поставляться: антенные блоки, специализированный блок обработки с полевой сумкой, комплект с радиомодемом для дистанционной работы с георадаром, датчик перемещения с колесом и оптокабелем, автомобильный датчик перемещений, измеритель пути с катушкой и оптокабелем, блоки питания и зарядные устройства к ним, профессиональная версия ПО управления и обработки.
Особенности
Для работы в полевых и неблагоприятных климатических условиях георадар комплектуется вариантом блока обработки и индикации на основе карманного компьютера (КПК). Достоинства: малый вес, термовлагозащитность, хорошая видимость на ярком солнце, низкое энергопотребление.
Все блоки георадара имеют оптическую развязку (приемник, передатчик, блок управления, датчик перемещения). Это уменьшает собственные помехи системы и дает более стабильные сигналы при перемещении антенных блоков по пересеченной местности.
Радиомодем позволяет производить дистанционное управление прибором и осуществлять съем информации с антенных блоков в радиусе до 100 м.
Набор антенных блоков обеспечивает зондирование в диапазоне частот от 50 МГц до 1,7 ГГц.
Высокая прочность антенных блоков, выполненных из алюминиевых сплавов. Все антенны, за исключением дипольной, экранированы.
Для привязки получаемого при зондировании профиля на местности возможно использование датчиков перемещения трех типов.
Малое энергопотребление - от одного комплекта аккумуляторов возможна работа в течение 4 - 8 ч.
Высокая надежность - георадары изготавливают на оборонном предприятии.
Компактность - комплект прибора перевозится в удобной транспортной сумке. Антенны большого размера имеют разборную конструкцию.
Программное обеспечение для георадаров серии «ОКО» GeoScan32
Программа GeoScan32 предназначена для управления георадаром серии «ОКО», а также последующей математической обработки и наглядной визуализации получаемой в процессе зондирования информации.
Программа предоставляет возможность сохранять на диске и внедрять в документы MS Word получаемые пользователем изображения подповерхностной среды, а также позволяет производить их распечатку на принтере.
2. Георадары зарубежного производства
2.1. Георадар «Зонд-12е» («Зонд-12е», «Зонд-12е» двухканальный) фирмы «Radar Systems» (Латвия)
Георадар «Зонд-12е» - цифровой портативный радар подповерхностного зондирования, предназначенный для решения широкого спектра задач, где есть необходимость неразрушающего и оперативного электромагнитного мониторинга среды. Набор сменных антенн позволяет проводить зондирование в диапазоне частот от 38 МГц до 2 ГГц.
В зависимости от исполнения прибор имеет один или два канала записи данных. Малое энергопотребление блока управления позволяет вести непрерывную съемку до 10 ч. Управление всеми параметрами георадара осуществляется через компьютер типа «Notebook». Данные зондирования в реальном времени выводятся на дисплей компьютера и одновременно с этим записываются на жесткий диск для дальнейшей обработки.
Антенны выполнены в пылебрызгозащищенном варианте и даже допускают кратковременное погружение в воду.
Привязку получаемого при зондировании профиля можно осуществлять с помощью GPS. Управляющая программа Prism 2 позволяет использовать практически все известные методы обработки данных. Для трехмерной визуализации используется программа Prism Layers3D.
|
Показатель |
«Зонд-12е» |
«Зонд-12е» двухканальный |
|
Привязка данных на местности |
Вручную или автоматически (GPS, одометр, мерная нить) |
|
|
Канальность |
1 |
2 |
|
Передача данных |
Ethernet |
|
|
Рабочие температуры |
От -10 °С до +40 °С при влажности до 95 % |
|
Используемые антенны
1. Экранированные антенны для «Зонд 12е» (1,5 ГГц, 900 МГц, 750 МГц, 500 МГц, 300 МГц, 100 МГц)
|
Показатель |
1,5 ГГц |
900 МГц |
750 МГц |
500 МГц |
300 МГц |
100 МГц |
|
Разрешение |
0,1 - 0,15 м |
0,2 м |
0,15 - 0,2 м |
0,5 м |
1,0 м |
2 м |
|
Глубина зондирования |
2 - 3 м |
3 - 5 м |
1,5 - 3 м |
7 - 10 м |
1 м |
10 - 15 м |
2. Неэкранированные антенны для «Зонд 12е» (2 ГГц, 150-75-38 МГц)
|
Показатель |
2 ГГц |
150 - 75 - 38 МГц |
|
Разрешение |
0,06 - 0,1 м |
1 - 4 м |
|
Глубина зондирования |
1,5 - 2 м |
7 - 30 м |
2.2. Detector-DUO
Георадар Detector-DUO разработан специально для быстрого и эффективного поиска всех видов подземных коммуникаций в режиме реального времени, прибор позволяет обнаружить объект в грунте и точно определить его местоположение.
В отличие от аналогов в приборе совмещены две антенны - 250 и 700 МГц, что позволяет одновременно получать информацию о коммуникациях, расположенных на разных глубинах. Таким образом, мы получаем за один «проход» двойной объем данных, что значительно убыстряет сбор информации и облегчает интерпретацию полученных данных. Вам не надо покупать дополнительные антенные блоки, менять их и повторять съемку с антеннами разной частоты для получения полной картины расположения коммуникаций.
Радарограммы можно сохранить для составления отчетов и дальнейшего анализа в сложных случаях.
2.3. Георадар Professional Explorer MALA РгоЕх
Professional Explorer - многоканальная георадарная система от компании Mala GeoScience.
Система универсальна, комбинируя ее модули, можно получить георадар для решения самых разнообразных задач подповерхностного зондирования.
Базовая система поставляется в двухканальном исполнении (2 физических канала, 4 канала данных), что дает возможность не только ускорять проведение работ, но и получать объемные данные от перекрестной записи сигналов.
Подключая дополнительные модули расширения функциональности, можно получить систему, работающую с восемью физическими каналами. Это позволит работать одновременно с восемью антеннами с перекрестной записью сигналов внутри каждой пары (16 каналов данных).
Три типа антенных модулей (коаксиальный, оптический и высокочастотный) позволяют подключать одну или несколько антенн MALA в любом их сочетании. Таким образом, появляется возможность производить георадарные исследования любым из известных способов с применением новейших технологий.
Частотный диапазон зондирования от 25 до 2300 МГц позволяет проводить исследования на глубину от первых сантиметров до 60 м.
Работы могут проводиться в одноканальном режиме, в режиме многоканальной томографии или в режиме послойного определения скоростей волн в среде.
Используемые антенны
1. Экранированные антенны для RAMAC (> 1000 МГц) (1,6 ГГц; 1,6 ГГц; 1,2 ГГц; 1,2 ГГц; 1 ГГц)
|
Показатель |
1,6 ГГц |
1,2 ГГц |
1 ГГц |
|
Характеристики антенны |
|||
|
Разрешение |
0,005 м |
0,005 - 0,1 м |
0,01 м |
|
Глубина зондирования |
0,8 м |
1 м |
4 м |
|
Особенности |
Встроенный кабелеискатель |
Встроенный кабелеискатель |
- |
2. Экранированные антенны для RAMAC (< 1000 МГц) (800 МГц, 500 МГц, 250 МГц, 100 МГц)
|
Показатель |
800 МГц |
500 МГц |
250 МГц |
100 МГц |
|
Характеристики антенны |
||||
|
Разрешение |
0,02 м |
0,04 м |
0,05 - 0,5 м |
0,1 - 1 м |
|
Глубина зондирования |
6 м |
10 м |
15 м |
25 м |
3. Неэкранированные антенны для RAMAC (25 МГц; 50 МГц; RTC 50 МГц; 100 МГц; 200 МГц)
|
Показатель |
25 МГц |
50 МГц |
RTC 50 МГц |
100 МГц |
200 МГц |
|
Характеристики антенны |
|||||
|
Разрешение |
1 м |
0,5 м |
0,1 - 1 м |
0,05 - 0,5 |
|
|
Глубина зондирования |
60 м |
30 м |
25 м |
15 м |
|