МЕТОДИЧЕСКАЯ ДОКУМЕНТАЦИЯ В СТРОИТЕЛЬСТВЕ
Общество
с ограниченной ответственностью
«ТЕКТОПЛАН»
РЕКОМЕНДАЦИИ
ПО ПРОВЕДЕНИЮ ДИНАМИЧЕСКОГО
МОНИТОРИНГА ВЫСОТНЫХ ЗДАНИЙ
И СООРУЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ
НАВИГАЦИОННОГО ПОЛЯ
ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ
СПУТНИКОВЫХ СИСТЕМ (ГНСС)
МДС 13-23.2009
Москва 2010
Рекомендации разработаны ООО «Тектоплан» (канд. техн. наук В.Д. Фельдман, инж. Л.M. Мережко) совместно с ООО «Простор» (канд. техн. наук В.В. Нефедов) по заданию Управления научно-технической политики в строительной отрасли Департамента градостроительной политики, развития и реконструкции города Москвы.
Рекомендации согласованы с Управлением научно-технической политики в строительной отрасли Департамента градостроительной политики, развития и реконструкции города Москвы.
МДС 13-23.2009 распространяется как документ, рекомендуемый к утверждению в качестве стандарта саморегулируемых организаций (СРО).
Разработчики будут благодарны пользователям издания за замечания и предложения, которые будут учтены при последующих изданиях.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
В период бурного строительства уникальных комплексов (высотные здания, спортивные сооружения др.) задачи обеспечения безопасности строительных конструкций приобретают особенно высокий приоритет.
Мониторинг состояния здания с использованием спутниковых технологий является оптимальным дополнением таких традиционных систем, как тензометры, уклономеры, наклономеры, традиционных геодезических наблюдений за осадками и кренами зданий.
В настоящей Методике рассмотрены вопросы проведения динамического мониторинга высотных зданий и сооружений с использованием навигационного поля глобальных навигационных спутниковых систем (ГНСС). Данный метод наблюдений дает возможность определять положение фиксированных точек строительных конструкций зданий (сооружений) в реальном времени, а также дает возможность получения детального описания эксплуатационных характеристик сооружения в течение длительного периода времени. Преимущество такого мониторинга состоит в его непрерывном характере, в том числе в реальном времени, а также в наличии возможности оповещения заинтересованных лиц о достижении критических деформаций. Помимо данных об общем изменении положения здания в пространстве с течением времени, мониторинг с использованием ГНСС дает возможность исследовать и анализировать колебания высотных зданий.
Методика подготовлена: канд. техн. наук В.Д. Фельдманом, канд. техн. наук В.В. Нефедовым, инж. Л.M. Мережко.
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Динамический мониторинг (далее - мониторинг) с использованием навигационного поля глобальных навигационных спутниковых систем (ГНСС) представляет собой комплекс инженерно-геодезических работ, выполняемых с целью определения количественных характеристик деформационных процессов (горизонтальные перемещения верха), в т.ч. колебаний зданий и сооружений.
1.2. В настоящей «Методике» представлена общая концепция систем динамического мониторинга зданий и сооружений с использованием ГНСС.
1.3. Мониторинг включает в себя следующие основные этапы:
разработка технического задания;
рекогносцировка объекта;
разработка программы проведения мониторинга;
монтаж и запуск комплекса оборудования;
обработка результатов наблюдений;
формирование отчетной документации.
1.4. Измерения деформационных характеристик зданий и сооружений должны проводиться по разработанной программе, включающей следующие разделы:
пояснительная записка, описание объекта;
перечень контролируемых параметров;
схемы размещения базовых станций, методы закрепления или использование существующих, их координаты;
схемы размещения рабочих пунктов на здании, выбор метода закрепления;
описание выбранной методики наблюдений;
используемая система координат;
программа выполнения наблюдений, методики постобработки, включая методику оценки точности полученных результатов;
рекомендуемое оборудование и программное обеспечение;
форма предоставления отчетной документации, периодичность предоставления отчетной документации;
1.5. Состав работ по каждому этапу является индивидуальным для каждого объекта.
1.6. При выполнении работ по непосредственной настройке системы, настройке отдельных приемников, программного обеспечения и пр. следует руководствоваться эксплуатационной документацией, прилагаемой к спутниковому оборудованию и программному обеспечению.
2. ОСНОВНЫЕ ПРИНЦИПЫ СИСТЕМЫ МОНИТОРИНГА С ИСПОЛЬЗОВАНИЕМ ГНСС
2.1. Схема мониторинга с использованием ГНСС базируется на классическом типе геодезической сети для выявления деформаций, т.е. методе определения смещений контрольных пунктов относительно базовых (исходных), расположенных вне зоны деформаций (колебаний).
2.2. Спутниковые наблюдения следует проводить в дифференциальном режиме.
2.3. Смещения контрольных пунктов, закрепленных на наблюдаемом здании, сооружении, определяются как разность координат за определенный промежуток времени.
2.4. Состав системы мониторинга с использованием ГНСС:
1) сеть базовых станций вне зоны деформаций;
2) сеть станций на наблюдаемом объекте (рабочие станции);
3) система персональных компьютеров с соответствующим программным обеспечением для управления системой мониторинга;
4) система коммуникаций (каналы связи для передачи данных);
5) средства обеспечения безопасности, бесперебойного электропитания и пр.
2.5. Принципиальная схема системы мониторинга приведена на рис. 2.1.
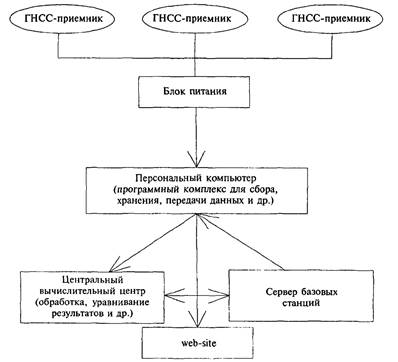
Рис. 2.1. Принципиальная схема системы мониторинга с использованием ГНСС
3. ОБЩИЕ ТРЕБОВАНИЯ К ПРОЕКТИРОВАНИЮ СИСТЕМЫ ДИНАМИЧЕСКОГО МОНИТОРИНГА
3.1. Требования к проектированию базовых станций
3.1.1. Для целей динамического мониторинга возможно использовать либо специально созданные базовые станции (предпочтительней), либо уже существующие базовые станции на территории г. Москвы.
3.1.2. Базовые станции в городе Москве рекомендуется располагать на крышах зданий и сооружений. Характеристики зданий и сооружений указаны в п. 3.1.14.
3.1.3. Состав постоянно действующей базовой станции:
1) жестко зафиксированная спутниковая антенна;
2) приемник ГНСС;
3) источник бесперебойного питания;
4) вычислительный центр, управляющий сетью базовых станций, собирающий и архивирующий данные сети и выдающий координатно-временную информацию, в том числе и для работы в реальном времени (RTK и DGPS);
5) сети коммуникаций, связывающие базовую станцию с вычислительным центром и обеспечивающие доступ к данным: модем для передачи по коммутируемой линии (наземная линия связи, GSM, высокоскоростная беспроводная и т.д.), Интернет, местные или глобальные сети (протокол TCP/IP), прямое последовательное соединение.
3.1.4. Пример состава оборудования для базовой станции приведен на рис. 3.1.
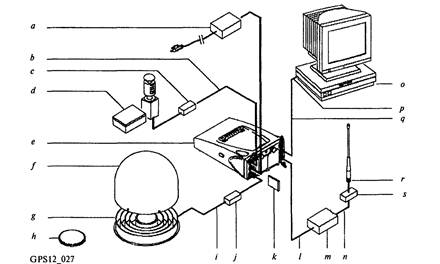
Рис. 3.1. Пример подготовки оборудования базовой
станции
( на примере приемника Leica серии 1200)
|
a) Адаптер переменного тока 100/240 В для преобразования питания 12 В постоянного тока; |
j) Сглаживающий фильтр; |
|
b) Интерфейсный кабель; |
k) Карта CompactFlash card; |
|
c) DB9 - сглаживающий фильтр; |
l) Кабель радиоинтерфейса; |
|
d) Метеодатчик/датчик наклонов с интерфейсным кабелем; |
m) Радио; |
|
e) Приемник серии GRX1200 Series; |
n) Кабель для подключения радиоантенны; |
|
f) Защитный обтекатель для антенны АТ504; |
о) Компьютер со специальным программным обеспечением, например, с LEICA GPS Spider; |
|
g) АТ504; |
р) Последовательный порт; |
|
h) АХ 1202; |
r) Радиоантенна; |
|
i) Антенный кабель TNC - TNC; |
s) Фильтр радиоканала; |
|
|
q) Кабель для передачи данных |
3.1.5. Управление станцией должно осуществляться автоматически с персонального компьютера с помощью специализированного программного обеспечения. Управление работой базовой станции рекомендуется осуществлять компьютером, расположенным на удалении от приемника, либо через Интернет.
3.1.6. Данные, собираемые на станции, архивируются на жестком диске компьютера для последующей обработки и передачи по каналам связи на FTP-сервер для удаленного доступа.
3.1.7. Приемник ГНСС базовой станции должен работать постоянно и передавать «сырые» данные кодовых или фазовых спутниковых измерений в память компьютера.
3.1.8. Необходимо обеспечить надежное и бесперебойное электропитание оборудования базовой станции. Должен быть предусмотрен резервный источник питания как для приемника, так и для компьютера.
3.1.9. Передачу дифференциальных поправок следует осуществлять с передатчика базовой станции, расположенного в удобном месте, по радиоканалам, высокоскоростным беспроводным сетям (GSM, GPRS, CDMA и др.) или через Интернет. При удалении от базовой станции точность определяемых координат ухудшается пропорционально расстоянию. Для измерений в режиме реального времени (RTK) удаление от базовой станции должно быть не более 25 - 30 км, рекомендуемое удаление не более 10 км. Для получения надежных данных динамического мониторинга рекомендуется иметь минимум две базовые станции.
3.1.10. На сервере следует установить специализированное программное обеспечение для управления базовыми станциями, позволяющее загружать файлы спутниковых данных приемников в память сервера через регулярные промежутки времени (при необходимости - ежесекундно).
3.1.11. Центр, используемый для базовых станций, должен быть спроектирован с тем, чтобы его стабильность (неизменность координат по всем трем измерениям с течением времени) была максимальной.
3.1.12. Не допускается экранирование до угла возвышения 10 градусов при наблюдении с точки размещения антенны. На углах возвышения от 0 до 10 градусов следует минимизировать количество экранирующих объектов. Громоотводы, антенны систем связи и прочие объекты должны располагаться не ближе 3-х метров от спутниковой антенны базовой станции, их верхние части не должны быть выше основания антенны.
3.1.13. Следует минимизировать помехи, исходящие от радио- и электрического оборудования (телевизионные передатчики и приемники, KB- и УКВ-передатчики, PЛC, радиорелейные станции, высоковольтные ЛЭП). Вышеуказанные помехи могут привести к временному или полному срыву слежения за спутником, и даже полной невозможности производить измерения на этом пункте. Всеми средствами следует избегать близкого соседства с таким оборудованием. Все находящиеся вблизи пункта радиосредства обязательно должны быть указаны в пояснительной записке отчета.
3.1.14. Установка антенн ГНСС для базовых станций допускается только на строения из кирпича или железобетона. Здание должно быть построено не менее чем за 5 лет до установки знака. Сооружение, на котором устанавливается знак, не должно иметь видимых трещин на внутренних и внешних стенах. Недопустимо использовать деревянные сооружения и конструкции с металлическим каркасом или металлическими несущими стенами (ангары и т.п.).
3.1.15. Антенна базовой станции должна быть неподвижно закреплена на твердом основании. Антенну рекомендуется устанавливать на отдельно стоящем железобетонном пилоне или на стальной трубе диаметром не менее 10 см, которую жестко крепят на несущих элементах здания, крышах. Пилон или труба должны быть снабжены устройством (винтом) для принудительного крепления антенны.
3.1.16. Требования к креплениям ГНСС-антенн к зданию, сооружению:
1) Рекомендуется использовать для крепления стойку из нержавеющей стали (профиль - уголок или труба).
2) Стойку следует крепить болтами (сваркой) непосредственно к несущей стене здания, оптимальным местом размещения является угол, сформированный двумя несущими стенами.
3) Для резьбовых соединений настоятельно рекомендуется использование стопорящих мастик.
4) Крепление стойки на дымовую трубу допускается, только если она особо прочная или заглушена бетоном.
5) Стойка не должна мешать ремонту крыши, что уменьшит вероятность повреждения центра во время ремонта.
6) При креплении стойки сбоку на несущую стену стойка должна выступать по крайней мере на 0,5 метра над верхним срезом крыши и должна быть прикреплена к стене по длине не менее 1 метра тремя или более анкерными болтами. Отношение длин свободной и закрепленной частей должно быть примерно 1:3. Болты должны проходить прямо сквозь стойку, не допускается применение U-образных креплений, скоб, хомутов.
7) При креплении стойки в несущую стену болт или арматурный стержень следует закладывать в несущую стену. Следует избегать повреждения металлического фартука, закрывающего парапет.
8) Антенная стойка не должна уклоняться от вертикали на угол более 0,15 градуса (или 2,5 мм на метр), такой точности выставки вполне можно добиться с использованием строительных уровней.
3.1.17. Антенный кабель следует прокладывать таким образом, чтобы он не был натянут. Если кабель не прокладывается по кабельному каналу, следует принять меры по его фиксации с тем, чтобы он двигался и не перетирался. Рекомендуется использовать кабель длиной не более 30 м. Рекомендуется использовать оптическое волокно, нечувствительное к электромагнитным волнам и грозовым разрядам, обеспечивающее высокое качество и скорость передачи данных во время плохой погоды или неблагоприятных условий окружающей среды. Кроме того, современные оптико-волоконные приемные устройства могут обнаружить любое прерывание при передаче данных и послать сигнал аварийному персоналу с указанием его местонахождения.
3.1.18. Рекомендуется обеспечить защиту от молний и гроз с помощью молниеотвода или громоотвода. Для того, чтобы не мешать прохождению спутниковых сигналов, стержни молниеотвода не должны быть слишком высокими. Молниеотвод антенны должен быть связан с молниеотводной системой здания и заземлен.
3.1.19. Для защиты приемника и всего оборудования, которое к нему подключено (за исключением спутниковой антенны), рекомендуется использовать заземленный грозовой разрядник, размещаемый в антенном кабеле, между антенной и приемником. Рекомендуется применение грозовых разрядников в антенном фидере. Грозовой разрядник должен быть подключен к контуру заземления. Грозовой разрядник следует размещать вне здания или непосредственно возле ввода кабеля в здание. Грозовой разрядник предназначен для защиты электронных узлов от импульсов наведенного напряжения при близком разряде молнии.
3.1.20. Антенну рекомендуется закрывать пластиковым радиопрозрачным куполом для защиты от осадков.
3.1.21. Необходимо обеспечить сохранность оборудования в течение длительного времени.
3.2. Требования к проектированию рабочих станций, размещаемых на наблюдаемом объекте (здании, сооружении)
3.2.1. Состав рабочей станции:
1) жестко зафиксированная в несущих конструкциях здания, сооружения спутниковая антенна;
2) приемник ГНСС;
3) источник бесперебойного питания;
4) персональный компьютер, управляющий рабочей станцией, собирающий, архивирующий и выдающий данные с возможностью доступа в дистанционном режиме;
5) сети коммуникаций, связывающие рабочую станцию с вычислительным центром и обеспечивающие доступ к данным.
3.2.2. Управление рабочей станцией должно осуществляется автоматически с персонального компьютера с помощью специализированного программного обеспечения.
3.2.3. Приемник ГНСС рабочей станции может работать постоянно или периодично.
3.2.4. Необходимо обеспечить наличие надежного бесперебойного электропитания оборудования рабочей станции.
3.2.5. Спутниковые антенны рабочих станций следует размещать на крышах зданий, сооружений.
3.2.6. Размещение спутниковых антенн должно удовлетворять следующим требованиям:
1) обеспечение стабильности положения антенны. Центры (кронштейны, уголки и пр.), на которые устанавливаются антенны, должны быть закреплены в несущих конструкциях здания (сооружения);
2) наличие беспрепятственного обзора неба;
3) отсутствие в непосредственной близости объектов, которые могут быть источником многолучевости;
4) отсутствие в близлежащей области радиопередатчиков, которые могут быть источником помех;
В целом, требования к конструктивному размещению спутниковых антенн рабочих станций аналогичны требованиям к размещению антенн для базовых станций (пп. 3.1.10 - 3.1.12, 3.1.14, 3.1.16).
3.2.7. Требования к креплениям спутниковых антенн рабочих станций аналогичны требованиям для базовых станций (3.1 - 15).
3.2.8. Требования к защите антенн от внешних воздействий аналогичны требованиям пп. 3.1.17 - 3.1.20.
3.2.9. Спутниковые приемники и компьютерное оборудование рекомендуется размещать на техническом этаже либо в других оборудованных местах.
3.2.10. Антенны следует размещать вблизи главных или основных осей зданий (сооружений), в местах возможного появления наибольших деформаций (колебаний), так, чтобы обеспечить полноту информации об изменениях положения здания с течением времени.
3.2.11. Рекомендуется размещать не менее 4-х спутниковых антенн на здании (сооружении). Повышение количества ГНСС-приемников, установленных на наблюдаемом сооружении, позволит существенно повысить надежность получаемых результатов. Пример схемы размещения спутниковых антенн на здании простой геометрической формы приведен на рис. 3.2.
![]() - Контрольный пункт мониторинга (место установки
антенны ГНСС)
- Контрольный пункт мониторинга (место установки
антенны ГНСС)
Рис. 3.2. Типовая схема размещения спутниковых
антенн на здании простой геометрической формы
4. ТРЕБОВАНИЯ К ТЕХНИЧЕСКИМ ВОЗМОЖНОСТЯМ ОБОРУДОВАНИЯ ПРИ ПРОВЕДЕНИИ ДИНАМИЧЕСКОГО МОНИТОРИНГА ЗДАНИЙ
4.1. Приемники должны быть сертифицированы для геодезического применения в РФ и иметь свидетельства о поверке.
4.2. Согласно паспортным данным приборов инструментальная точность определения координат контрольных пунктов на наблюдаемом здании (сооружении) с использованием ГНСС должна быть:
При статической съемке (с режимом постобработки):
в плане не ниже ±5 мм + 1 мм/км;
по высоте не ниже 10 мм + 1 мм/км.
В режиме кинематической съемки (RTK):
в плане не ниже ±10 мм + 1 мм/км;
по высоте не ниже ±20 мм + 1 мм/км.
4.3. В комплект приемника должен входить программный пакет для ЭВМ, обеспечивающий вычислительную обработку.
4.4. Приемники, предназначенные для базовых станций, должны соответствовать следующим техническим требованиям:
1) возможность приема сигналов систем GPS и ГЛОНАСС всех типов (L1, L2, кодовые, фазовые). Рекомендуется использовать двухчастотные 72-канальные спутниковые ГНСС-приемники. Одночастотные приемники можно использовать в пределах небольших короткобазисных сетей, но предпочтительно применять двухчастотные;
2) возможность генерирования выходных данных всех форматов (RTK, DPGS, NMEA);
3) наличие портов для:
соединения с управляющим компьютером, на котором работает программное обеспечение станции (СОМ или Ethernet);
подключения коммуникационного устройства для передачи RTK- и DGPS-поправок;
подключения основного и резервного источников питания;
подключения внешнего стандарта частоты (если необходимо);
вывода меток точного времени (PPS);
подключения периферийных устройств, таких как метеорологические датчики и датчики наклона;
4) возможность передачи непрерывного потока «сырых» спутниковых данных на управляющий компьютер;
5) большой объем внутренней памяти для накопления данных в случае прекращения связи с компьютером и возможность автоматической передачи этих данных при восстановлении соединения.
4.5. Перечень рекомендуемых ГНСС-приемников для базовых станций приведен в табл. 4.1.
4.6. Антенны, предназначенные для базовых станций, должны соответствовать следующим техническим требованиям:
1) возможность приема сигналов GPS/ГЛОНАСС диапазонов L1 и L2 (отслеживание с частотой 10 Гц);
2) высокая стабильность фазового центра (< 1 мм);
3) наличие экрана для переотраженных сигналов;
4) устойчивость антенны к RF-искажениям.
Рекомендуется использовать антенны типа Choke-ring, снабженные специальным экраном с кольцами для защиты от переотраженных спутниковых сигналов.
4.7. Перечень рекомендуемых ГНСС-антенн для базовых станций приведен в табл. 4.1.
4.8. Приемники, предназначенные для рабочих станций, должны соответствовать следующим техническим требованиям:
1) возможность приема сигналов систем GPS и ГЛОНАСС всех типов (L1, L2, кодовые, фазовые). Рекомендуется использовать двухчастотные 72-канальные спутниковые ГНСС-приемники;
2) наличие портов для:
соединения с управляющим компьютером, на котором работает программное обеспечение станции (СОМ или Ethernet);
подключения основного и резервного источников питания;
подключения периферийных устройств, таких как метеорологические датчики и датчики наклона;
3) возможность передачи непрерывного потока «сырых» спутниковых данных на управляющий компьютер.
4.9. В качестве антенн для рабочих станций возможно использовать любой вид антенн с возможностью приема сигналов GPS/ГЛОНАСС диапазонов L1 и L2.
4.10. Перечень рекомендуемых ГНСС-антенн для рабочих станций приведен в табл. 4.1.
Таблица 1. Рекомендуемые технические характеристики и модели приборов и оборудования
|
Наименование оборудования и приборов |
Основные технические характеристики |
Модели оборудования и приборов |
|
Оборудование для базовых станций |
||
|
Приемники |
72 канала для независимого и одновременного отслеживания кода и фазы на частотах L1 и L2 (и др.) сигналов GPS и ГЛОНАСС Вывод данных с частотой от 20 Гц Передача данных в режимах RTK и DGPS |
Leica GRX1200 GG Pro Trimble NetR5 и др. |
|
Антенны |
Принимаемые сигналы: GPS/ГЛОНАСС Устойчивость фазового центра < 1 мм Рабочий диапазон температур: -40° до +50 °С 100 % влагозащищенность Вибростойкость Защита от песка, воды, пыли |
АТ504 GG (Leica) (Choke Ring) Trimble Choke Ring GNSS AX1202 GG (Leica) Trimble Zephyr Geodetic 2 и др. |
|
Оборудование для рабочих станций |
||
|
Приемники |
72 канала для независимого и одновременного отслеживания кода и фазы на частотах L1 и L2 (и др.) сигналов GPS и ГЛОНАСС Вывод данных с частотой от 20 Гц |
Leica GMX902 GG Leica GX 1230GG Trimble R6, R7 GNSS, R8 GNSS и др. |
|
Антенны |
Принимаемые сигналы: GPS/ГЛОНАСС Рабочий диапазон температур: -40° до +50 °С 100 % влагозащищенность Вибростойкость Защита от песка, воды, пыли |
Leica AX1202GG Leica ATX1230GG Trimble Zephyr и аналоги |
|
Примечание - Приемники для базовых станций более подробно рассмотрены в приложении 1. |
||
4.11. К производству работ рекомендуется допускать лиц, прошедших курс обучения работе с приемниками того типа, который предполагается применять для спутниковых определений.
4.12. Перед монтажом базовых или рабочих станций необходимо выполнять пробное тестирование аппаратуры. Пробные спутниковые определения необходимо выполнять теми же методами и, по возможности, в тех же условиях, что и на предполагаемом объекте работ.
5. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ СИСТЕМЫ МОНИТОРИНГА
5.1. Программное обеспечение для базовой станции должно иметь следующие функции:
автоматическая передача файлов с приемника на жесткий диск ПК;
проверка целостности данных, фильтрация;
сохранение данных на жесткий диск;
конвертация данных в формат RINEX (Compact Rinex);
архивация;
передача данных для постобработки;
передача дифференциальных поправок;
контроль состояния и функционирования приемника;
проверка систем связи и т.п.
5.2. Перечень рекомендуемого программного обеспечения для базовых станций с характеристиками программ приведен в приложении 2.
5.3. Программное обеспечение для обработки результатов спутниковых измерений должно иметь следующие функции:
прием и передача данных;
предварительная обработка данных;
просмотр и редактирование;
оценка качества;
окончательная обработка;
уравнивание;
преобразование координат;
организация базы данных;
сервисные функции.
5.4. Перечень рекомендуемого программного обеспечения для обработки результатов спутниковых измерений приведен в приложении 3.
6. ПОСТОБРАБОТКА РЕЗУЛЬТАТОВ СПУТНИКОВЫХ НАБЛЮДЕНИЙ
6.1. В результате проведения постобработки должны быть вычислены координаты контрольных точек на здании (сооружении), которые позволят судить о пространственных деформациях здания.
6.2. Постобработка результатов измерений может выполняться как с использованием программ, входящих в комплект к спутниковому оборудованию, так и с использованием специально разработанных программ (см. приложения 2 - 3).
6.3. Постобработку следует проводить по следующим этапам:
1) разрешение неоднозначностей фазовых псевдодальностей до наблюдаемых спутников, получение координат определяемых точек в системе координат глобальной навигационной спутниковой системы и оценка точности;
2) трансформация координат в принятую систему координат;
3) уравнивание геодезических построений и оценка точности уравненных координат (оценка и исключение случайных ошибок, обеспечение единственного решения при наличии избыточных данных; минимизация поправок, внесенных в измерения, и т.д.).
6.4. В качестве исходных условий должны быть заданы пункты, участвующие в обработке, опорные станции, координаты базовых станций, интервалы времени для полевых данных, включаемых в обработку, а также должны быть выбраны параметры вычислений: корректировка угла отсечки (15°), выбор тропосферной модели, выбор ионосферной модели, выбор варианта использования эфемерид, выбор комбинации частот и пр.
7. ПОДГОТОВКА ОТЧЕТНЫХ МАТЕРИАЛОВ ПО РЕЗУЛЬТАТАМ ДИНАМИЧЕСКОГО МОНИТОРИНГА
7.1. По результатам мониторинга необходимо составлять технические отчеты с периодичностью, установленной техническим заданием.
7.2. В процессе работ необходимо составлять технические отчеты:
по окончании работ монтажа и настройки системы мониторинга;
в процессе мониторинга с периодичностью, установленной техническим заданием (программой производства работ).
7.3. По окончании монтажа и настройки системы мониторинга следует оформить следующие материалы:
1) пояснительная записка (название организации и год производства работ; административная принадлежность района работ; описание объекта работ; содержание и назначение работ и т.п.);
2) краткое описание методики наблюдений;
3) сведения о принятой системе координат и высот;
4) сведения о базовых и рабочих станциях:
схема установленных спутниковых антенн базовых и рабочих станций;
абрисы местоположения спутниковых антенн;
журналы и абрисы препятствий;
акты сдачи установленных спутниковых антенн для наблюдения за сохранностью;
названия контрольных пунктов и их условные обозначения, внесенные в регистрационный файл;
фамилии исполнителей полевых и камеральных работ;
тип и серийные номера основных компонентов спутниковой аппаратуры (антенны, приемника и т.д.);
зарисовки или фотографии установки антенны;
5) сведения об используемом программном обеспечении;
6) сведения о критических деформациях, при которых оповещаются заинтересованные лица.
7.4. Отчетные материалы в процессе мониторинга могут предоставляться как в графическом, так и в электронном виде.
7.5. Отчетные материалы в процессе мониторинга должны содержать следующие материалы:
краткая пояснительная записка; схемы размещения базовых станций и контрольных точек на здании, сооружении;
информация о сроках выполнения измерений;
ведомости координат, деформационных характеристик, подлежащих определению согласно техническому заданию (программой производства работ). В ведомостях необходимо указать величины деформационных характеристик за определенные этапы времени с оценкой точности полученных величин. Должны быть указаны величины деформационных характеристик за текущий период наблюдений и суммарные значения за весь период наблюдений;
графики деформаций (колебаний);
результаты наблюдений. Форма предоставления результатов наблюдений должна быть указана в программе производства работ (в виде координат, графиков и др.).
7.6. При появлении критических деформаций (колебаний) либо близких к ним необходимо незамедлительно направлять информацию всем заинтересованным лицам.
8. ОБЩАЯ ТЕХНИКА БЕЗОПАСНОСТИ
8.1. К работе с аппаратурой допускаются лица, прошедшие инструктаж по технике безопасности.
8.2. Техническое описание спутниковых приемников должно содержать требования по технике безопасности и обеспечению безопасности для здоровья обслуживающего персонала и окружающих людей.
8.3. К работе с аппаратурой допускаются лица, прошедшие обучение и изучившие инструкцию эксплуатации для используемой аппаратуры.
8.4. Необходимо строго соблюдать требования по технике безопасности, изложенные в инструкции для эксплуатации аппаратуры.
8.5. Пользователю запрещается разбирать аппаратуру и производить другие операции, не предусмотренные инструкцией по эксплуатации.
8.6. Пользователю запрещается работа с приемников, имеющим явные повреждения или дефекты.
8.7. Настоятельно рекомендуется использовать молниеотводы. Для предотвращения повреждений от непрямых ударов молнии (скачки напряжения) антенну, источники питания и модемы рекомендуется оснащать соответствующими средствами защиты, такими как, например, грозозащитный разрядник.
ПРИЛОЖЕНИЕ 1
ГНСС-ПРИЕМНИКИ ДЛЯ БАЗОВЫХ СТАНЦИЙ
1. Серия Leica GRX1200 GG
Приемники данной серии обеспечивают получение некоррелированых данных высшего качества при любых условиях. Они точны для всех видов применения базовых станций. Приемники GRX1200 GG Pro принимают сигналы спутниковых систем ГЛОНАСС и GPS, включая L2C. При этом имеется возможность модернизации до приема сигналов GPS L5, европейской системы Galileo и китайской системы Beidou-2 (Compass). Приемник имеет встроенный FTP-сервер, позволяющий просто и быстро скачивать данные вручную без какого-либо специального программного обеспечения. Или использовать функцию FTP Push, позволяющую полностью автоматически выгружать с приемника на удаленный FTP-сервер. Таким образом, наличие встроенного современного Интернет-интерфейса в приемнике позволяет исключить персональный компьютер из оборудования базовой станции.
Серия Leica GRX1200 обеспечивает любой информацией, требуемой для осуществления высокоточной съемки с помощью всех типов RTK- и ГИС-приемников. Они осуществляют передачу RTK- и DGPS-данных из места размещения по радиомодему или мобильному телефону или распределяют данные из центра управления по радиомодему, мобильному телефону или через Интернет. Поддерживаются форматы RTCM, собственно LEICA, CMR и CMR+.
Приемники могут передать два различных формата одновременно на двух различных частотах или используя два различных медиаустройства (например, радио и телефон). Поддерживается квантование времени.
|
GPS-технология |
SmartTrack |
|
Тип, каналы |
Двухчастотный, 12L1 + 12L2, 20 Hz |
|
SmartTrack |
Время, необходимое для захвата спутника после включения приемника: обычно около 30 секунд. |
|
Современная технология GPS-измерений |
Перезахват спутника после потери слежения: обычно около 1 секунды. |
|
Очень высокая чувствительность: захват с вероятностью более 99 % для всех возможных наблюдений при высотах места спутника более 10 градусов. |
|
|
Очень низкий шум: Устойчивое слежение за сигналом. |
|
|
Слежение за слабым сигналом при низких углах и неблагоприятных условиях. |
|
|
Уменьшение влияния многолучевости. Защита от радиопомех. |
|
|
Точность измерений: |
|
|
Фаза несущей частоты |
L1 и L2 : 0,2 мм |
|
Код (псевдодальность) |
L1 и L2 : 20 мм |
|
Статус индикаторов |
3 светодиода: для питания, слежения за спутниками, работы с памятью |
|
Web-доступ включен |
Контроль и конфигурация приемника с помощью web-браузера через сеть Ethernet или протокол РРР. |
|
Защита информации по протоколу SSL и управление доступом. |
|
|
Доступ к памяти приемника по протоколу FTP. |
|
|
Дополнительно: |
Leica GPS Spider. |
|
Программное обеспечение системы управления |
Для управления отдельными станциями и сетями RTK. |
|
Вес |
1,2 кг |
|
Диапазон температур |
ISO9022, MIL-STD-810F |
|
Рабочий |
-40 °С до + 65 °С |
|
Хранение |
-40 °С до +80 °С |
|
Влажность |
ISО9022, MIL-STD-810F |
|
До 100 % |
|
|
Водонепроницаемость |
MIL-STD-810F |
|
Временное погружение на глубину до 1 м |
|
|
Дождь, пыль, песок, ветер |
MIL-STD-810F, IP67/IP57 |
|
Герметичен от порывистого ветра, дождя, песка и пыли |
|
|
Ударопрочность |
Выдерживает падение с высоты 1 м |
|
Виброзащищенность |
ISО9022, MIL-STD-810F |
|
Выдерживает вибрации без потери приема сигнала |
|
|
Напряжение питания |
Номинально 12 В постоянного тока |
|
Внешний источник питания |
От 10,5 до 28 В постоянного тока |
|
2 канала питания |
1 основной, 1 запасной |
|
|
|
|
|
GRX1200 Pro |
|
Потребляемая мощность |
4,2 Вт |
|
Порты |
|
|
Внешнее питание |
2 |
|
Последовательный |
4 |
|
Антенна |
1 |
|
Для дополнительного контроллера |
1 |
|
Ethernet |
1 |
|
Вывод PPS (импульсов в секунду) |
1 |
|
Ввод маркера событий |
1 |
|
Внешний генератор |
1 |
|
Регистрация «сырых» данных |
+ |
|
Передача данных в режимах RTK и DGPS |
|
|
Leica для SmartStation |
+ |
|
Leica, CMR, CMR |
+ |
|
RTCM v2.1/2.2/2.3/3.0 |
+ |
|
Другие данные |
|
|
«Сырые» данные Leica LB2 |
+ |
|
BINEX |
+ |
|
NMEA 0183 |
+ |
|
NTRIP |
|
|
Интегрированный сервер NTRIP |
+ |
|
Одновременная передача в режиме RTK |
Для двух портов, в одном или различных форматах |
2. Приемники Trimble NetR5
Приемник Trimble NetR5 специально предназначен для установки в качестве постоянно действующей базовой станции. В ее состав не требуется включать дополнительный компьютер - достаточно просто подключить базовую станцию к Ethernet-порту и настроить передачу данных непосредственно пользователям или в центр обработки сети базовых станций.
В случае перебоев в электросети или на линии связи приемник имеет емкий встроенный аккумулятор и большую внутреннюю память, которую можно практически неограниченно расширять с помощью внешних USB-устройств, таких как модули флэш-памяти или жесткие диски. После восстановления связи файлы измерений будут автоматически отправлены пользователям.
Настройки и состояние базовой станции можно проверить с помощью экрана и кнопок на передней панели приемника, а также дистанционно с любого компьютера, подключенного к Интернету. Удобный встроенный Web-интерфейс приемника на русском языке позволяет выполнять все необходимые операции.
Безопасность доступа обеспечивается индивидуальными паролями для каждой группы пользователей.
Общие характеристики
Технология Trimble R-Track
Современная технология Maxwell GNSS
Высокоточный коррелятор измерений псевдодальностей по сигналам GNSS
Фазовые измерения на частотах системы GNSS с очень низким уровнем помех, с точностью < 1 мм в полосе 1 Гц
Представление отношения «сигнал-шум» в виде dB-Hz
Проверенная технология Trimble для слежения за спутниками с малыми значениями высот над горизонтом.
|
72 канала: |
NAVSTAR: L1 С/А код, L2C, фаза несущей L1/L2/L5; ГЛОНАСС: L1 С/А код, LI Р код, L2 Р код, фаза несущей L1/L2; SBAS WAAS/EGNOS |
|
Выполнение дифференциальной съемки с кодовым сигналом |
|
|
Точность: |
В плане: ±0,25 м + 1 мм/км |
|
По высоте: ±0,50 м + 1 мм/км |
|
|
Выполнение статической съемки (режимы: статика, быстрая статика) |
|
|
Точность: |
В плане: ±5 мм + 0,5 мм/км |
|
По высоте: ±5 мм + 1,0 мм/км |
|
|
Выполнение кинематической съемки (только в качестве ровера под управлением ПО GPSNet) |
|
|
Точность: |
В плане: ±10 мм + 1,0 мм/км |
|
По высоте: ±20 мм + 1,0 мм/км |
|
|
Инициализация |
менее 10 секунд |
|
Надежность инициализации |
более 99,9 % |
|
Физические характеристики |
|
|
Корпус |
полностью герметичный |
|
Размеры |
24 см×12 см×5 см |
|
Водонепроницаемость |
выдерживает погружение в воду на 1 метр (стандарт IPX 7) |
|
Ударопрочность и виброзащищенность |
выдерживает падение с высоты 2 м на жесткую поверхность |
|
Вибростойкость |
40 G в соответствии со стандартами MIL-STD-810F, FIG.514.5C-1 |
|
Вес |
1,55 кг (со встроенным аккумулятором) |
|
Рабочая температура |
-40 °С - +65 °С |
|
Температура хранения |
-40 °С - +80 °С |
|
Влажность |
полностью водонепроницаем |
|
Электрические характеристики |
|
|
Электропитание: |
Вход питания от 10,5 до 28 В пост, тока на порт Lemo с защитой от перенапряжения |
|
Вход питания от 9,5 до 28 В пост, тока на 26-контактный разъем D sub с защитой от перенапряжения |
|
|
Потребляемая мощность |
< 4,8 Вт |
|
Аккумуляторы: |
встроенная литий-ионная батарея 7,4 В, 7800 мАч, на 15 часов непрерывной работы, является резервным источником питания. |
|
Встроенное зарядное устройство для зарядки внутреннего аккумулятора при напряжении внешнего питания более 15 В |
|
|
Связь, обмен и хранение данных: |
- Функционирует как NTRIP-сервер и клиент; |
|
- LAN-порт для подключения к сетям 10BaseT/100BaseT |
|
|
- 3 стандартных DB9 RS232 порта |
|
|
- Bluetooth-порт |
|
|
- USB-порт |
|
|
Регистрация «сырых» L1/L2 GPS-данных (в режиме «Статика») приблизительно в течение 1620 часов с интервалом записи через 15 секунд от 6 спутников (с использованием 59 Мб встроенной памяти) |
|
|
Возможность подключения внешних устройств хранения данных |
|
|
Интервал определения координат и записи данных |
1 Гц, 2 Гц, 5 Гц, 10 Гц и 20 Гц |
|
Вывод по протоколам |
RT17/RT-27, CMR, CMR+, RTCM 2.1, 2.2, 2.3, 3.0, BINEX |
|
HTML-браузер |
Internet Explorer 5.0 и выше, Netscape 4.78 и выше |
|
1 антенный порт, который поддерживает любую антенну Trimble геодезического класса, включая Trimble Zephyr Geodetic 2 и Trimble GNSS Choke Ring |
|
ПРИЛОЖЕНИЕ 2
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ БАЗОВЫХ СТАНЦИЙ
1. Leica GNSS Spider
GPS Spider - интегрированный пакет программного обеспечения для контроля и управления как отдельными станциями, так и сетями базовых станций. GPS Spider является модульной, наращиваемой системой, в которой воплощены передовые решения для постоянно действующих высокоточных сетей RTK (SpiderNET), централизованного распространения данных, с возможностью управления данными, а также сбора и обработки данных.
Leica GNSS Spider имеет несколько модулей и может быть расширен различными функциями, в том числе для предоставления сетевых дифференциальных поправок для работы в режиме RTK на большом удалении (SpiderNET Network RTK), централизованного распространения данных для постобработки.
Leica GNSS Spider, поддерживает GNSS-приемники Leica серий System 1200, GMX900 и System 500, а также спутниковые приемники других производителей.
Установив только одну базовую станцию под управлением GNSS Spider, возможно в будущем наращивать количество базовых приемников для создания сети референцных станций.
На начальном этапе программа GPS Spider может быть установлена в такой конфигурации, которая позволяет обеспечивать автоматизированный прием спутниковых данных с одной или нескольких референцных станций с автоматическим преобразованием данных в формат RINEX, проверкой качества, сохранением данных на жесткий диск компьютера, записью событий. Имеется служба FTP для размещения файлов «сырых» измерений в сети Internet.
Программа GPS Spider может быть установлена в конфигурации, позволяющей формировать спутниковые дифференциальные поправки в реальном масштабе времени для транслирования их по радиоканалу, сотовым сетям, в сети Internet. Дифференциальные поправки могут быть сформированы в различных форматах, включая общеиспользуемый формат RTCM. GPS Spider может одновременно создавать поправки различных форматов и типов для работы в режимах RTK, DGPS от одиночных базовых станций и сетевые поправки вида VRS, FKP от нескольких станций.
Программный модуль Leica GNSS SpiderNET предназначен для анализа данных реального времени, поступающих от базовых приемников, и моделирования ошибок спутниковых измерений в области сети референцных станций.
Сетевые дифференциальные поправки обеспечивают постоянную точность и надежность измерений в режиме RTK. Сетевые поправки могут формироваться на основе стандарта RTCM V3.1 с использованием специально разработанных технологий позиционирования Leica МАХ и i-MAX.
Новая концепция работы с сетевыми дифференциальными поправками MAC (Master-Auxiliary Concept) позволяет быстро и надежно получать точное местоположение в сети референцных станций. При этом Leica GNSS Spider предоставляет возможность работать в режиме RTK пользователям оборудования фирмы Leica, а также и других производителей.
Модуль сетевой обработки Leica GNSS SpiderNET полностью поддерживает сигналы спутниковых систем GPS/ГЛОНАСС при создании всех сетевых дифференциальных поправок в реальном времени. Leica GNSS Spider является средством для организации сервиса позиционирования в сетях базовых станций на самом современном уровне с использованием GPS/ГЛОНАСС-сигналов.
Программный модуль Leica GNSS Spider Positioning позволяет применять технологию спутникового позиционирования в реальном времени или с постобработкой данных для отслеживания движения антенн базовых станций, а также геодезического мониторинга различных объектов и сооружений. Позиционирование может осуществляться относительно одиночной базовой станции или с применением сетевых поправок.
В дополнение к Leica GNSS Spider существует программное обеспечение Leica GNSS QC для контроля качества и анализа GPS/ГЛОНАСС-данных.
2. Trimble GPSBase
Trimble GPSBase - программное обеспечение для управления одиночной базовой станцией. Оно позволяет производить запись данных для постобработки и передавать их в реальном времени.
Trimble GPSBase поддерживает до десяти различных сценариев передачи поправок в режиме реального времени. Это позволяет одновременно передавать дифференциальные поправки в форматах CMR и RTCM.
Оператору базовой станции доступна подробная информация о количестве и расположении спутников на небесной сфере, статусе GPS-эфемерид, анализе значений DOP, а также детализированные оценки эффекта многолучевости и ионосферных ошибок.
3. Trimble GPSNet
Программное обеспечение Trimble GPSNet позволяет создать современную ГЛОНАСС/GPS-инфраструктуру из нескольких базовых станций. Используя Trimble GPSNet, можно управлять сетью постоянно действующих базовых станций на необходимый район работ. Объединение одиночных базовых станций в единую сеть осуществляется, используя различные каналы связи.
Программное обеспечение Trimble GPSNet предоставляет возможность полного дистанционного управления всеми базовыми станциями. Все необходимые параметры (количество принимаемых спутников, значения DOP, эффект многолучевости и т.д.) легко контролируются оператором сети.
Для каждой базовой станции индивидуально устанавливаются частота сбора данных, величина маски возвышения, формат записываемых данных и другие параметры.
Важной функцией программного обеспечения Trimble GPSNet является постоянный контроль целостности всей системы базовых станций и передаваемых потребителю данных. Оператор ГЛOHACC/GPS-инфраструктуры может быть немедленно оповещен о неполадках в работе системы.
Для работы с ГЛOHACC/GPS-инфраструктурой в режиме реального времени пользователю необходимо соединиться с единым вычислительным центром сети, используя, например, GSM- или GPRS-соединение.
Программное обеспечение Trimble GPSNet имеет модуль автоматической загрузки быстрых эфемерид из Интернета, увеличивая тем самым надежность системы.
В постобработке Trimble GPSNet обеспечивает удобный доступ к данным любой базовой станции через FTP или Интернет. Возможность автоматического архивирования данных базовых GPS-станций в форматы Rinex Hatanakawm Trimble Dat Zip позволяет максимально эффективно использовать файловое пространство сервера.
ПРИЛОЖЕНИЕ 3
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ОБРАБОТКИ ГНСС-ДАННЫХ
1. LEICA Geo Office
LEICA Geo Office обеспечивает все необходимое для управления, визуализации, обработки, импорта и экспорта данных измерений, собранных с помощью GPS/ГЛОНАСС-приемников. Анализ и обработка данных осуществляются раздельно или совместно.
Данные спутниковых приемников управляются однообразно с помощью стандартизированных программных функций и единого потока данных.
LEICA Geo Office содержит следующие стандартные функции:
управление данными;
настраиваемый импорт и экспорт данных;
средства для GNSS;
визуализация и редактирование;
простое создание отчетов.
Стандартные функции могут быть расширены дополнительными модулями:
обработка GPS/ГЛОНАСС-измерений;
преобразование координат;
импорт данных в RINEX-формате;
уравнивание сети;
экспорт данных в GIS/CAD-форматах.
Импорт данных можно осуществляться с карт памяти CompactFlash, напрямую из инструментов, а также из текстовых файловых или через сеть Internet. Экспорт результатов вместе с кодами и атрибутами точек, линий и других объектов можно выполнять в любые программы CAD, GIS и другие картографические системы.
Создание кодового листа, диспетчер данных, редактор форматов и загрузчик обновления встроенного ПО - основные средства для GPS/ГЛОНАСС-приемников.
Основанный на HTML-формате генератор отчетов позволяет быстро настроить вид и выбрать самые необходимые данные.
Постобработка GPS/ГЛОНАСС-измерений
Этот модуль обрабатывает все типы «сырых» данных GPS/ГЛОНАСС. Одно из основных приложений - классическая обработка базовых линий в геодезических опорных сетях. Модуль также используется для определения точек траекторий на периоды отсутствия радиомодемной связи, когда RTK-поправки не передавались. Для вычисления базовых линий можно использовать настройки по умолчанию, чтобы провести весь процесс в полностью автоматизированном режиме. Для критических линий или специальных исследований обработка может быть проведена вручную. Этот режим очень хорош для опытных пользователей, которые могут создать свои собственные настройки и сценарии обработки данных. Диспетчер результатов содержит множество графических средств для анализа и создания отчетов, которые позволяют более детально рассмотреть полученный результат перед его окончательной записью в файл.
В LEICA Geo Office есть полный набор библиотек и функций по определению систем координат и преобразованию из одной системы в другую.
Есть возможность импортировать для обработки в LEICA Geo Office измерения, полученные с помощью GNSS-приемников других производителей, в RINEX-формате (Receiver INdependant EXchange format), ставшем стандартным форматом обмена данными спутниковых наблюдений.
Модуль Уравнивания сетей позволяет комбинировать все типы данных, полученных от различных инструментов, - GNSS-приемников, TPS (тахеометров) и нивелиров или, наоборот, уравнять их отдельно по методу наименьших квадратов для поиска наилучшего решения и проверки совмещения с уже известными координатами контрольных точек. Мощная статическая отбраковка позволяет находить грубые ошибки и просчеты. Модуль Уравнивания сетей базируется на программном ядре MOVE3 со встроенными строгими алгоритмами уравнивания. Программа уравнивает трехмерные спутниковые сети. Уравнивание может быть как отдельным по типу сети, так и совместным. Еще одно достоинство Модуля Уравнивания сетей - это возможность создать и анализировать будущую сеть для оценки ее дальнейшего применения.
Данный модуль позволяет извлечь точки, включая тематические коды, из проекта LEICA Geo Office и сформировать файлы в форматах AutoCAD DWG, MicroStation DGN, MapInfo MIF или DXF.
2. Trimble Geomatic Office
Trimble Geomatic Office - это программное обеспечение Trimble, которое объединяет в себе все аспекты работы с GPS.
Основные свойства программного обеспечения:
обработка GPS базовых линий;
уравнивание;
контроль и проверка качества данных (QA/QC);
создание отчетной документации;
управление проектами;
импорт архивированных проектов из ПО GPSurvey.
Просмотр схемы съемки используется для редактирования «сырых» данных, анализа результатов съемки, обработки GPS базовых линий и выполнения уравнивания по методу наименьших квадратов.
Файлы ПО Trimble Survey Controller, включающие любую комбинацию измерений в реальном времени, «сырых» GPS-данных:
GPS-данные кинематики в реальном времени (RTK);
«сырые» GPS-данные в форматах Trimble и RINEX;
данные из других проектов через формат Trimble Data Exchange Format;
данные с оборудования от других производителей, например, Nikon, Leica, Trimble (Carl Zeiss), Sokkia, Topcon, Trimble, TDS, SDMS.
Обширный набор инструментов проверки качества обеспечивает быстрый и точный доступ к информации о качестве данных.
Мощный модуль уравнивания Network Adjustment, использующий метод наименьших квадратов, доступен из Просмотра схемы съемки (Survey View). Есть возможность включать и исключать отдельные вектора из уравнивания. Результаты наблюдений могут быть востребованы или отключены таким же образом.
После уравнивания для каждого пункта в окне просмотра схемы съемки показываются эллипсы ошибок (в плане и по высоте). По этим данным может быть оценено качество измерений и уравнивания.
Контроль качества измерений реализуется с использованием системы контроля QA/QC (Quality Assurance/Quality Control). В каждом модуле Trimble Geomatics Office есть инструменты, которые помогают установить высокие стандарты качества выполняемых работ и при необходимости найти недостоверные данные во всем массиве измерений.
Окно редактирования «сырых» данных выводит на экран график данных съемки в зависимости от времени. Всевозможные настройки позволяют опытным пользователям анализировать различные комбинации взаимных переменных для контроля качества данных или поиска проблем, возникших при обработке. Для начинающих пользователей и для тех, кто нуждается в быстрой обработке по стандартной схеме, Trimble Geomatics Office обеспечивается максимально возможное использование проверенных на практике параметров обработки (установленных по умолчанию) и графических инструментов для редактирования и просмотра результатов съемки и перехода в завершающую стадию работы над проектами, включающими высококачественную геодезическую съемку.
ПО Trimble Geomatics Office позволяет создавать более 14 видов отчетов. Есть возможность создания собственного формата выводимого отчета и сохранения его для дальнейшего использования.
3. Trimble Business Center
Программное обеспечение Trimble Business Center - это комплекс модулей, объединенных на единой платформе и предоставляющих уникальные возможности для совместной обработки спутниковых ГНСС-измерений.
Для решения задач обработки геодезических измерений программный комплекс Trimble Business Center предоставляет следующие основные возможности и инструменты:
импорт и экспорт комбинированных GNSS-измерений, включая загрузку данных из Internet;
быстрые алгоритмы обработки базовых линий, полученных в сеансах измерений в системах GPS и ГЛОНАСС;
гибкие средства настройки стилей обработки, критериев качества и оценки точности полученных результатов;
«Проводник проекта» - новое удобное средство отображения объектов в виде древовидной структуры, облегчающее навигацию, поиск и выделение данных проекта;
«Диспетчер фильтров просмотра» предоставляет средства для управления отображением данных;
разнообразные средства отображения данных проекта, такие как «Вид в плане», «Хронология» (шкала времени), «Редактор сессий», «Панель свойств» объектов, а также трехмерная визуализация обеспечивают новый уровень производительности, удобства и наглядности при работе над проектом;
мощный математический аппарат для уравнивания GNSS-сетей методом наименьших квадратов, а также процедура калибровки в местных системах координат;
широкие возможности создания пользовательских систем координат, преобразований ИГД и проекций на основе предустановленных государственных систем. При этом сохраняется преемственность базы данных систем координат с комплексом Trimble Geomatics Office и другими программными продуктами;
формирование настраиваемых HTML-отчетов на различных этапах обработки измерений;
полностью русифицированная справочная система;
современный пользовательский интерфейс и отображение данных.
Сведения о точках и базовых линиях могут быть представлены в виде наглядных таблиц. Просмотр, сортировка и редактирование данных в таблицах выполняются с помощью стандартных операций.
Очень удобен трехмерный вид, который используется для визуализации данных проекта с возможностью вращения изображения.
Существует два вида программы Trimble Business Center: стандартный (Survey Standard) и расширенный (Survey Advanced). Помимо основного пользовательского интерфейса, команд и возможностей, они обеспечивают следующие функции:
обработка базовых линий по L1 и L2 GPS;
обработка базовых линий по ГЛОНАСС;
комбинированная обработка;
уравнивание векторов, обработанных по L1 и L2 GPS;
уравнивание векторов, обработанных по ГЛОНАСС;
комбинированное уравнивание;
расширенный отчет о статистике обработки базовых линий и уравнивания сети.
Обработка базовых линий служит для определения и обеспечения координат наивысшего качества для каждой точки проекта. Между этими точками из базовых линий создаются пространственные векторы. «Редактор сессий» позволяет вручную отбраковать «сырые» измерения.
Хронологический вид (отображение сеансов на шкале времени) позволяет наглядно оценить структуру сеансов измерений, проконтролировать доступность спутников в сессиях и синхронность измерений по времени.
В отдельном окне работает «Редактор сессий», позволяющий добиться максимально качественных результатов обработки, исключая из обработки сбойные эпохи наблюдений.
Развернутые сведения о качестве обработки предоставляет «Отчет по обработке GNSS-векторов», содержащий графики неувязок в измерениях и уровень шумов.
Интересной функцией программы Trimble Business Center является возможность представления точек, полученных в режиме непрерывной кинематики, как в виде отдельных векторов, так и в виде траекторий, обрабатываемых единым массивом. Это значительно увеличивает скорость обработки, экономит оперативную память и позволяет без необходимости не загромождать проект.
После обработки и сохранения всех базовых линий в проекте имеется возможность выполнить команду «Замыкание полигонов». Это делается для создания отчета «Результаты замыкания полигонов» с целью выявления неудовлетворительных векторов в замкнутых фигурах.
Уравнивание сети обработанных векторов выполняется с помощью анализа методом наименьших квадратов. Реализованный в Trimble Business Center усовершенствованный модуль уравнивания, используя весьма мощный и быстрый алгоритм, легок в применении и позволяет включать и выключать измерения из уравнивания сети, в том числе графически, а также достичь высококачественных результатов уравнивания при фиксации координат опорных пунктов. Полученные в результате уравнивания эллипсы ошибок отображаются как в окне просмотра План, так и в Панели результатов уравнивания сети. Подробная информация по оценке точности формируется в Отчете по уравниванию сети, степень полноты которого может быть настроена пользователем.
Калибровка участков производится с целью минимизации неувязок между накопленными данными в системе координат WGS-84 и данными в местной системе координат. Для калибровки необходимо связать GNSS-точки с точками местной опорной сети. Программа Trimble Business Center предоставляет гибкий в настройках модуль калибровки, результат работы которого выводится в графическом и численном видах. Данная процедура позволяет достоверно и оперативно оценить согласованность опорных точек при работе в местных системах координат.
Отчет по калибровке содержит подробные сведения о результатах вычислений с оценкой точности и данные о параметрах преобразования.
«Опции отчета» используются для настройки итоговых отчетов. Заданные параметры сохраняются, обеспечивая согласованность формата вывода при создании отчетов. Панель команды «Опции отчета» содержит все доступные настройки для формирования отчетов. Все отчеты имеют HTML-формат и могут быть просмотрены в стандартном интернет-браузере. Помимо большого числа предустановленных форматов для данных отчета имеется возможность гибкой настройки любых пользовательских форматов.
ПРИЛОЖЕНИЕ 4
СПЕЦИАЛИЗИРОВАННОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ДИНАМИЧЕСКОГО МОНИТОРИНГА
1. LEICA GeoMoS
LEICA GeoMoS - это современная программа для мониторинга и анализа текущего состояния наблюдаемого объекта. Система устанавливается на любых объектах - больших и маленьких, существующих и строящихся.
GeoMoS состоит из двух приложений - Монитор (Monitor) и Анализатор (Analyzer). Monitor работает в режиме реального времени, отвечает за накопление данных и контроль измерений, проверку допустимых значений, мониторинг сообщений и контроль измерительного цикла. Analyzer - приложение для анализа, которое отвечает за анализ и создание отчетов измеренных данных, редактирование и постобработку. Данные и результаты могут быть представлены в цифровом и графическом видах и экспортированы в различные стандартные форматы.
Поддерживаются различные устройства (например, тахеометры, GPS, метеорологические сенсоры, геотехнические сенсоры). Устройства управляются с помощью LEICA Sensor Manager, в котором имеется настройка конфигурации устройства.
Leica GeoMoS Web представляет собой простое и удобное приложение, которое обеспечивает интернет-доступ к данным мониторинга через различные стандартные вэб-браузеры и поддерживает гибкие пользовательские настройки для просмотра проектов через авторизованный доступ. Правила этого доступа устанавливаются индивидуально, и легко выполняются настройки вывода изображений согласно пользовательским требованиям. Интерактивная графика позволяет быстро выполнять операции по общему обзору данных мониторинга, детальному их анализу и информированию персонала при выходе выявленных деформаций за установленные пределы. Leica GeoMoS Web использует принцип «Software as a Service» (SaaS). Это означает, что он является сервисом по заказу, дающим пользователям возможность просмотра информации, и имеет надежную защиту от несанкционированного доступа (SSL-кодировка). Любой авторизованный пользователь получает возможность просматривать данные со своего компьютера, КПК или мобильного телефона.
Поддерживаемые устройства:
GPS System 500, GPS 1200, GMX900;
метеорологические сенсоры (например, температурные, барометрические);
геотехнические сенсоры (например, экстенсиометры);
датчики наклона Nivel 210, Nivel 220;
сенсоры от других производителей.
Технические характеристики:
система имеет удаленный доступ для работы и изменения установок;
масштабируемая конфигурация от одной до нескольких станций;
поддержка больших баз данных с многопользовательским интерфейсом (SQL-Server);
большое количество подключаемых измерительных станций, объединенных в одну систему;
параллельное использование нескольких устройств (тахеометры, GPS, метеорологические и геотехнические сенсоры);
автоматическое регулирование и синхронизация получения данных по кабелю, радиомодему, LAN, WAN или через Internet;
возможность измерять расстояния на большой дальности (до 5 км);
моделирование метеорологической сети вокруг объекта измерений;
мощный набор средств для графического и цифрового анализа данных;
запись производимых изменений во время редактирования и постобработки;
управление сообщениями о текущем состоянии (например, превышено ограничение, нет питания, взлом или разрушение);
передача сообщений по электронной почте или цифровому интерфейсу;
импорт-экспорт в другие системы (ASCII, DGN, WMF, стандартный формат Excel).
2. GOCA
Проект GOCA (GPS-based Online Control and Alarm Systems) является проектом развития и исследования и разрабатывается при институте инновации и трансфера (ИИТ), а также при факультете геодезии и геоматики высшей технической школы города Карлсруэ.
GOCA применяема для онлайн-контроля и сигнализации очень чувствительных строительных сооружений и геотехнического оборудования всякого рода.
Функции GOCA:
онлайн-моделирование классической геодезической сети для выявления деформаций;
запись и графическое изображение данных, зарегистрированных в GOCA-Center на месте или через дистанционное наблюдение;
фильтрация и анализ данных, зарегистрированных во времени;
автоматическое оповещение при достижении критического состояния объекта.
Программное обеспечение для управления аппаратными средствами ответственно за коммуникацию между программным обеспечением для деформационного анализа GOCA и применяемыми датчиками.
Программное обеспечение GOCA осуществляет помимо инициализации, преобразования координат в систему пользователя, проверки стабильности опорных пунктов также деформационный анализ участвующих в мониторинге объектных точек (оценка поведения, фильтрация Кальмана, FEM), управление аварийной сигнализацией и прогноз деформаций.
Программа GOCA осуществляет обработку и анализ данных, полученных при постоянном мониторинге:
устройство и управление GOCA-проектов (банк данных с GPS-пунктами; системы координат, определенные пользователем; управление эпохами);
определение координат стабильных пунктов и их управление;
проверка стабильности опорных пунктов;
постоянное определение координат объектных пунктов в референцной системе;
онлайн-оценка позиции, скорости и ускорения на основе фильтра Кальмана;
графическое изображение данных объектных пунктов, зарегистрированных во времени, в комфортном графике;
фильтры в режиме постобработки, такие как полиномы, сплайны, переменное арифметическое среднее и изображение их результатов в графике.
Онлайн-контроль с системой GOCA требует создания проекта. К нему относятся: указание названия проекта, спецификация GPS-тoчек как стабильных и объектных пунктов и при желании пользователя определение локальной системы координат (например, системы строительного сооружения).
Инициализация проекта позволяет создать сеть опорных пунктов, на которые опираются координаты точек в объектном участке с самого начала записи данных. Основой для оценки по методу наименьших квадратов служат базовые линии, зарегистрированные в нулевом цикле измерения (нулевая эпоха), который должен быть указан при исполнении инициализации. Уравнивание происходит раздельно для горизонтальных и высотных компонентов, т.е. базовые линии, геоцентрические координаты которых известны, преобразовывают строго по закономерности накопления ошибок в прямоугольные координаты на эллипсоиде. Инициализация содержит автоматическую статистическую проверку и элиминацию ошибочных базовых линий. Базовые линии, которые были признаны ошибочными, могут быть маркированы в первичных файлах и таким образом быть исключены для последующих вычислений. Результаты уравнивания, как и результаты интерактивного поиска ошибок, обобщены в протоколах для горизонтальных и вертикальных координат.
С помощью координат всех пунктов, полученных путем уравнивания, могут быть определены параметры преобразования в локальную систему пользователя.
Координаты объектного пункта вычисляются путем уравнивания в референцной системе, записываются, изображаются в виде кривых и анализируются в каждый момент сканирования.
Рис.4.1
В графике могут быть изображены данные к выбранному пункту объекта любой эпохи вплоть до актуального времени. Через регулировку графика можно изобразить любой компонент координат данных и вычисленных кривых фильтра.
К функциям фильтра в онлайн-режиме относятся переменное арифметическое среднее и уравнивающие полиномы с выбором алгоритмов, основанных на методе наименьших квадратов или на устойчивой L1-Norm. Результаты фильтрации регистрируются в суточных файлах и изображаются вместе с данными объектных пунктов в графике.
В режиме постобработки проводится фильтрация для выбранной эпохи, результат также показан в графике (рис. 4.2: переменное арифметическое среднее, рис. 4.3: уравнивающий полином 2-й степени). Здесь также предоставлены полиномы и переменное арифметическое среднее. Дополнительно к этому возможно сглаживание с помощью сплайн-функций.
Рис.4.2
Рис.4.3
Рис. 4.4
С помощью модуля «Фильтр Кальмана» в программе GOCA возможно постоянное вычисление позиции, скорости и ускорения для каждой объектной точки. Результирующие данные изображаются в графике, для каждого компонента отдельно (рис. 4.4). Разработка мощного стандарта оповещения для программы GOCA происходит в настоящее время на основе модуля «Фильтр Кальмана».
Модуль оповещения программы GOCA- вычисление вероятности критических состояний:
На основе результатов Кальман-фильтрации вычисляется и изображается для каждой объектной точки вероятность достижения критического состояния (рис. 4.4.). Величины критического состояния для каждой объектной точки должен определить пользователь.
СПИСОК ЛИТЕРАТУРЫ
1. Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем ГЛОНАСС/GPS (ГКИНП (ОНТА)-01-271-03). Федеральная служба геодезии и картографии
2. ГКИНП (ОНТА)-02-262-02. Инструкция по развитию съемочного обоснования и съемке ситуации и рельефа с применением глобальных навигационных спутниковых систем ГЛОНАСС и GPS. М.: ЦНИИГАиК, 2002
3. РТМ 68-14-01. Спутниковая технология геодезических работ. Термины и определения. - М.: ЦНИИГАиК, 2001
4. Рекомендации по размещению и эксплуатации постоянно действующих референцных станций (CORS) (Continuously Operating Reference Stations)
(www.ngs.noaa.gov/PUBS_LIB/CORS_guidelines.pdf)
5. Kai-yuen Wong, King-leung Man, Wai-yee Chan «Мониторинг деформации мостов в Гонконге, используя метод кинематики в реальном времени (RTK GPS)» «GPS World»
6. Ana Paula С. Larocca, Ricardo Ernesto Schaal, Marcelo C. Santos. «Мониторинг динамического поведения канатного висячего моста по высокочастотным GPS-данным, «GPS World», Апрель 2005
7. Tracy Kijewski-Correa, Ahsan Kareem «Определение деформаций высотных зданий с помощью GPS», «GPS World», Сентябрь 2003
8. Донец A.M. Решение задачи геодезического мониторинга высотных зданий и сооружений методом спутниковой геодезии с использованием измерительно-вычислительного комплекса Trimble
http ://www. navgeocom.ru/projects/deform_ngk/index.htm
9. Генике A.A., Побединский Г.Е. Глобальная спутниковая система определения местоположения GPS и ее применение в геодезии. - М.: Картгеоцентр-Геоиздат, 1999
10. Харисов В.Н., Перов А.И. Глобальная спутниковая радионавигационная система ГЛОНАСС. - М.: ИПРЖР, 1998
11. Антонович К.М., Карпик А.П. Мониторинг объектов с применением GPS-технологий и других методов определения положения: Известия вузов. Геодезия и картография. - № 4. - 2003
12. http://www.gpsworld.com/
13. www.navgeocom.ru
14. www.geokosmos.ru
15. www.leica-geosystems.ru
16. http://www.orionmonitoring.com/index.htm
17. http://www.goca.info