МИНИСТЕРСТВО СТРОИТЕЛЬНОГО,
ДОРОЖНОГО
И КОММУНАЛЬНОГО МАШИНОСТРОЕНИЯ СССР
РУКОВОДЯЩИЙ НОРМАТИВНЫЙ ДОКУМЕНТ
ЭКСКАВАТОРЫ ОДНОКОВШОВЫЕ.
ПОВОРОТНЫЕ ПЛАТФОРМЫ И ХОДОВЫЕ РАМЫ.
РАСЧЕТ НА ПРОЧНОСТЬ
РД 22-157-86
МОСКВА 1987
УТВЕРЖДЕН: Зам. генерального директора НПО «ВНИИстройдормаш» П.В. Панкрашкиным 22 октября 1986 г.
ИСПОЛНИТЕЛИ: А.Р. Айзенштат, инж.; О.И. Грицевец, инж; В.Б. Елизарова, инж.; А.М. Крылов, к.т.н.; М.М. Гайцгори, к.т.н.; В.Л. Лифшиц, к.т.н.; Ю.М. Гольдин, к.т.н.; Г.А. Кондрахин, к.т.н.; Н.Н. Лукшо, инж. (НПО «ВНИИстройдормаш»)
СОДЕРЖАНИЕ
РУКОВОДЯЩИЙ НОРМАТИВНЫЙ ДОКУМЕНТ
|
Экскаваторы одноковшовые. |
РД 22-157-86 Введен впервые |
|
Срок введения |
с 01.07.87 г. |
Настоящий руководящий документ (РД) устанавливает порядок расчета на прочность металлоконструкций поворотных платформ и ходовых рам гидравлических и канатных одноковшовых экскаваторов с применением стандартных программ, реализующих метод конечных элементов (МКЭ) на ЭВМ. При разработке РД использованы материалы исследований, проведенных во ВНИИстройдормаше.
1. ОБЩИЕ ТРЕБОВАНИЯ К РАСЧЕТУ
1.1. РД устанавливает методику расчета и порядок подготовки исходных данных для расчета на прочность металлоконструкций поворотных платформ и ходовых рам одноковшовых экскаваторов.
1.2. РД распространяется на металлоконструкции поворотных платформ и ходовых рам универсальных гидравлических и канатных экскаваторов на гусеничном и колесном ходу.
1.3. Расчетные схемы представляют собой пространственные идеализированные конструкции, включающие все конструктивные элементы, работающие совместно: поворотные платформы, нижние, ходовые и гусеничные рамы, опорно-поворотное устройство.
1.4. Нагрузки определяются с учетом коэффициентов перегрузки и задаются в узлах расчетной схемы.
1.5. Для обеспечения прочности должны выполняться условия:
|
σпр ≤ 1,15Rym |
(1.1) |
|
σпр ≤ Rym |
|
|
τ ≤ Rsm, |
где σпр - приведенное расчетное напряжение в элементе;
Ry - расчетное сопротивление стали растяжению, сжатию, изгибу по пределу текучести;
σ - нормальное напряжение;
τ - касательное напряжение
Rs - расчетное сопротивление стали сдвигу;
m - коэффициент условий работы.
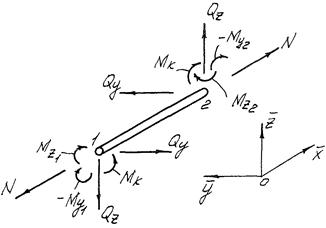
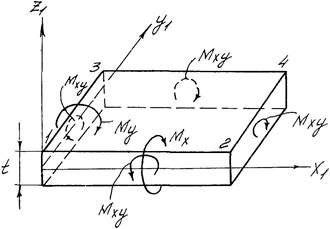
Для конечных элементов пластинчатого типа
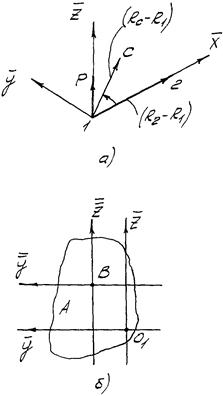
где σх и σy - нормальные напряжения по двум взаимно перпендикулярным осям x и у локальной системы координат (черт. 1.1)
Напряжения, входящие в формулу (1.2) определяются по зависимостям:
|
σx = σx′ + σx″; σy = σy′ + σy″; τ = τxy′ + τxy″, |
(1.3) |
где σx′, σy′, τxy′ - изгибные напряжения по толщине пластинки;
σx″, σy″, τxy″ - мембранные напряжения.
Изгибные напряжения по толщине пластинки определяются из соотношений:
|
|
(1.4) |
где Мх, Му, Мху - внутренние моменты, действующие на единицу длины x и y;
t - толщина пластинки;
Нормальные мембранные напряжения σx″ и σy″ действуют вдоль осей x и y соответственно местной системы координат пластинки, напряжение сдвига τxy″ соответствует деформации, при которой диагональ 1 - 4 удлиняется, а диагональ 2 - 3 укорачивается, либо наоборот (черт. 1.1).
Напряжения σx и σy следует определять в одной точке конечного элемента и брать каждое со своим знаком.
Для конечных элементов стержневого типа
Нормальные напряжения σ и касательные напряжения τ определяются в соответствии с рекомендациями РД 22-158-86 «Экскаваторы одноковшовые гидравлические. Рабочее оборудование. Расчет на статическую прочность металлоконструкций» (пункты 6.2, 6.3, 6.6).
Геометрические характеристики поперечных сечений вычисляются в соответствии с пунктами 6.4, 6.5 РД 22-158-86.
Расчетные сопротивления принимаются по приложению 1 в соответствии со СНиП II-23-81 «Стальные конструкции». Для сталей, не представленных в Приложении 1, расчетное сопротивление принимается равным меньшему из двух значений: 0,8 от предела текучести или 0,5 от предела прочности.
Коэффициенты перегрузки принимаются по таблице 1.1.
Таблица 1.1.
|
Нагрузка |
Коэффициент перегрузки K |
|
1. Собственный вес металлоконструкций |
1,1 |
|
2. Усилия в гидроцилиндрах стрелы |
1,1 |
|
3. Момент механизма привода поворота |
1,1 |
|
4. Усилия в пяте стрелы для гидравлических экскаваторов |
1,1 |
|
5. Усилия в шарнирах крепления двуногой стойки |
1,2 |
|
6. Усилия в опорах валов лебедок |
1,2 |
|
7. Усилия в пяте стрелы для канатных экскаваторов |
1,2 |
Черт. 1.1.
Коэффициенты условий работы принимаются по таблице 1.2. В неоговоренных случаях m = 1.
Таблица 1.2
Коэффициенты условий работы m
|
№ пп |
Наименование элемента конструкции |
Схема элемента конструкции |
m |
|
1 |
Элементы с малым поперечным сечением: листы, трубы, гнутые профили со стенками толщиной до 4 мм, равнобокие уголки ∟63×6, неравнобокие уголки до ∟90×56×6, швеллеры до № 8 |
|
0,9 |
|
2. |
Болты диаметром до 12 мм |
|
0,85 |
|
3. |
Элементы коробчатых конструкций с соотношением сторон более 3:1 |
|
0,9 |
|
4. |
Сечения, включающие швы и основной металл, например, расчет сварных швов приварки втулки |
|
0,9 |
|
5. |
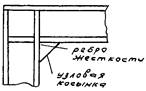
Элементы внутренних углов в узлах без узловых уширений, косынок, дифрагм, ребер жесткости |
|
0,3 |
|
6. |
То же с узловыми уширениями, косынками, диафрагмами, ребрами жесткости |
|
0,9 |
|
7. |
Проушины крепления пяты стрелы и цилиндров стрелы |
|
0,8 |
|
8. |
Участки продольных балок поворотной платформы прилегающие к проушинам крепления пяты стрелы |
|
0,7 |
2. НАГРУЗКИ
2.1. Нагрузками при определении прочности металлоконструкций поворотных платформ и ходовых рам являются: веса узлов металлоконструкций, веса наиболее крупных агрегатов, расположенных на поворотной платформе; максимальный момент механизма поворота; расчетные усилия в опорах пяты стрелы, гидроцилиндров стрелы для гидравлических экскаваторов, валов лебедок и двуногой стойки для канатных экскаваторов.
2.2. Весовые нагрузки от агрегатов и механизмов, расположенных на поворотной платформе, прикладываются в узлах расчетной схемы, соответствующих креплению агрегатов и механизмов.
2.3. Собственные веса металлоконструкций определяются по чертежам и распределяются по узлам конечных элементов. Для упрощения расчетов допускаются отклонения от действительной схемы передачи нагрузок, не снижающие запаса прочности: собственный вес можно присоединять к сосредоточенным нагрузкам.
2.4. Расчетные нагрузки, действующие на поворотную платформу гидравлических экскаваторов.
2.4.1. Для гидравлических экскаваторов расчет прочности поворотных платформ и ходовых рам ведется с оборудованием обратная лопата, в момент стопорения (упор в непреодолимое препятствие), так как в этом случае по исследованиям ВНИИстройдормаша на поворотную платформу и ходовую раму передаются наибольшие нагрузки.
2.4.2. Расчетные нагрузки в проушинах крепления пяты стрелы и цилиндров стрелы определяются по результатам расчета рабочего оборудования для трех расчетных случаев:
а) усилие в пяте стрелы максимально;
б) вертикальная составляющая усилия в пяте стрелы максимальна;
в) горизонтальная составляющая усилия в пяте стрелы максимальна.
2.4.3. Для задания расчетных нагрузок в проушинах крепления
пяты и цилиндров стрелы, возникающих при взаимодействии коша с грунтом,
рекомендуется пользоваться разработанной во ВНИИстройдормаше программой МЕСИ,
позволяющей определить величину и направление максимальных усилий в пяте стрелы
и соответствующих им усилий в гидроцилиндрах стрелы в результате перебора всех
вероятных положений ковша в забое с учетом ограничений по устойчивости и по
реактивному давлению в гидроцилиндрах. Копание производится как выдвижением
цилиндра ковша, так и выдвижением цилиндра рукояти. (См. РД
22-158-86 Экскаваторы одноковшовые гидравлические. Рабочее оборудование.
Расчет на статическую прочность металлоконструкций). ![]()
2.4.4. Коэффициент перегрузки принимается равным 1 при задании расчетных нагрузок в проушинах крепления пяты стрелы и цилиндров стрелы по результатам расчета рабочего оборудования по программе МЕСИ, так как величины усилий в пяте стрелы и в цилиндрах стрелы вычисляются по программе МЕСН с учетом соответствующих коэффициентов перегрузки.
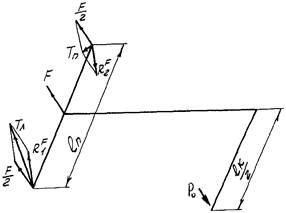
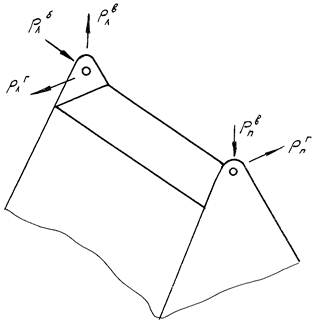
2.4.5. В пяте стрелы при взаимодействии ковша с грунтом от усилия Ро, действующего на зубе ковша, возникает усилие F, величина и направление которого определяются по результатам расчета рабочего оборудования. Усилие передается на поворотную платформу в проушинах крепления пяты стрелы (черт. 2.1).
|
|
(2.1) |
где Fл, Fп - усилия в левой и правой проушинах крепления пяты стрелы;
F - реакция в пяте стрелы от усилия Ро.
Усилие Ро прикладывается к крайнему зубу ковша и создает момент в пяте стрелы, который передается на поворотную платформу. Момент представляется парой сил RF1 и RF2, приложенных к проушинам крепления пяты стрелы (черт. 2.1).
|
|
(2.2) |
где: lк - ширина ковша;
lп - расстояние между проушинами крепления пяты стрелы.
Черт. 2.1
Черт. 2.2
Суммарные векторы усилий ![]() и
и ![]() в проушинах крепления пяты стрелы,
возникающие от усилия на зубе ковша, выразятся:
в проушинах крепления пяты стрелы,
возникающие от усилия на зубе ковша, выразятся:
левая проушина
|
|
(2.3) |
правая проушина
|
|
|
2.4.6. В расчете учитывается действие боковой силы возникающей на режущей кромке ковша от включения механизма поворота при стопорении.
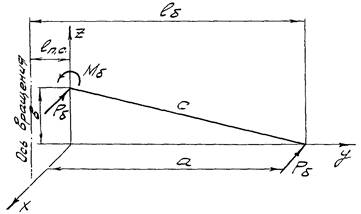
где: lп.с. - расстояние от оси вращения до пяты стрелы;
a - расстояние от пяты стрелы до зубьев ковша по горизонтальной оси у, расположенной в плоскости рабочего оборудования (черт. 2.2).
Расстояния a и b от пяты стрелы до зубьев ковша по горизонтальной оси y и вертикальной оси z соответственно меняются в зависимости от положения коша в забое (черт. 2.2).
Боковая сила Рб создает в проушинах крепления пяты стрелы реактивную силу и момент Mб равный
|
Mб = Pбc, |
(2.6) |
где: с - расстояние от пяты стрелы до зубьев ковша в плоскости рабочего оборудования.
Момент Mб раскладывается на два составляющих момента Мг и Мв, действующих в горизонтальной и вертикальной плоскости соответственно.
|
Mг = Pбa |
(2.7) |
|
Mв = Pбb |
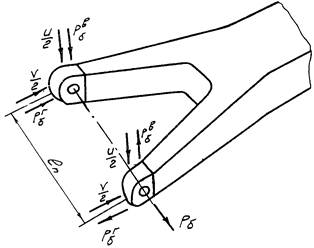
Расчетные нагрузки в левой и правой проушинах крепления пяты стрелы от действия боковой силы Pб на рабочем органе выражаются следующим образом (черт. 2.3).
От момента Mг, действующего в горизонтальной плоскости, в проушинах крепления пяты стрелы возникает пара сил
|
|
(2.8) |
От момента Mв, действующего в вертикальной плоскости, в проушинах крепления пяты стрелы возникает пара сил
|
|
(2.9) |
При боковых зазорах в пятах стрелы боковая сила Рб может восприниматься одной проушиной (правой или левой). Следует прикладывать боковую силу к наиболее нагруженной проушине (черт. 2.3).
|
Pбл = Рб |
|
2.4.7. Все расчетные нагрузки, действующие в проушинах крепления пяты и цилиндров стрелы на поворотной платформе, приводятся к вертикальным и горизонтальным равнодействующим для каждой проушины.
2.5. Расчетные нагрузки, действующие на поворотную платформу канатных экскаваторов.
2.5.1. При расчете прочности платформ и ходовых рам канатных экскаваторов нагрузки выбираются для момента отрыва препятствия ковшом прямой лопаты усилиями подъема и возврата, когда возникают максимальное усилие в стрелоподъемном полиспасте и максимальное усилие сжатия стрелы.
2.5.2. Расчетные нагрузки, возникающие от взаимодействия ковша с грунтом, определяются для положения рабочего оборудования согласно черт. 2.4. Стрела находится под минимальным углом α рукоять перпендикулярна стреле на полном вылете.
2.5.3. Реакции V и U в пяте стрелы, которые передаются на поворотную платформу, определяются из суммы моментов, действующих на стрелу нагрузок, относительно оси блоков головы стрелы и их проекций на продольную ось стрелы.
На стрелу действуют следующие нагрузки: расчетные усилия на блоке ковша Sп и напора или возврата Sн; веса стрелы Gc, блоков головы стрелы Gбл и напорного механизма Gнм расположенного на стреле (черт. 2.4, 2.6).
При определении реакций U и V необходимо учитывать схему запасовки канатов подъема ковша (черт. 2.5).
Для независимой схемы с канатным или цепным напором и для комбинированной схемы напора с напорным барабаном, расположенным на валу напора,
где: lc - длина стрелы;
Sнз - усилие в цепи привода напора или в напорных канатах;
Sнк - усилие в подъемном канате.
Черт. 2.3
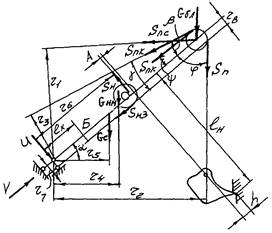
Черт. 2.4.
Черт. 2.5. Схема запасовки канатов подъема ковша экскаватора:
а - независимая полиспастная; б
- независимая бесполиспастная; в - зависимая;
1 - барабан подъема ковша; 2 - блоки головы стрелы; 3 - блок ковша; 4 -
напорный барабан.
|
|
(2.12) |
где iп - кратность полиспаста механизма подъёма ковша;
rп - к.п.д. полиспаста механизма подъёма.
Дня комбинированной схемы напора с напорным барабаном, расположенным в пяте стрелы, в формуле (2.10) принимается (Sп - Sпкi)rбл = 0, а в формуле (2.11) вместо Sпкicos γ подставляется Sпк (cos γ + cos ψ)
Для индивидуального привода напора при напорном механизме, расположенном на стреле, в формуле (2.10) и (2.11) значения
|
Sнзr8 = Sнзcos ε = 0 |
|
rбл - радиус головных блоков стрелы.
r1 ÷ r8 - плечи сил, действующих на стрелу.
|
|
|
Для большинства конструкций без больших погрешностей можно принимать соs ε = 1
|
|
|
|
|
|
Sпс - усилие в подвеске стрелы находится из суммы моментов относительно пяты стрелы.
Для независимой схемы с канатным или цепным напором и для независимой схемы напора с напорным барабаном, расположенным на валу напора
Черт. 2.6
Для комбинированной схемы напора с напорным барабаном, расположенным в пяте стрелы
|
|
(2.14) |
где rбн - радиус зависимой части напорного барабана.
Для индивидуального привода напора при расположении напорного механизма на стреле усилие Sпс определяется по формуле (2.13) при Sнзr7 = 0.
2.5.4. При задании внешних нагрузок учитывается боковая сила Рб, которая находится по формуле (2.4). Составляющие реакции от боковой силы Рб определяются зависимостями: (черт. 2.6)
|
|
(2.15) |
|
|
где lнв - расстояние от пяты стрелы до напорного вала (напорной оси).
Ввиду наличия значительных боковых зазоров в опорах пяты стрелы боковая сила Рб действует только на одну более нагруженную проушину.
2.5.5. Реакции в опорах штанг двуногой стойки на поворотной платформе определяются следующим образом
|
|
(2.16) |
где Sк - усилие в ветвях полиспаста;
n - количество ветвей.
Находятся проекции усилий в ветвях полиспаста на оси x и y определяются опорные реакции А и В, а затем графически находятся усилия в штангах двуногой стойки (черт. 2.7).
|
|
|
|
|
|
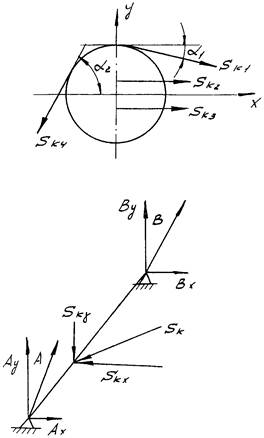
Черт. 2.7
Черт. 2.8
На черт. 2.8 представлена схема нагружения поворотной платформы в опорах двуногой стойки.
2.5.6. Из общего расчёта экскаватора выбираются реакции в опорах переднего и заднего валов лебёдки на поворотной платформе.
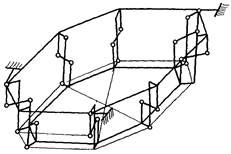
На черт. 2.9 дана типовая схема нагружения для расчёта поворотной платформы и ходовой рамы методом конечных элементов.
3. РАСЧЁТНЫЕ СХЕМЫ
3.1. Расчётная схема базовых конструкций экскаваторов включает в себя металлоконструкции поворотной платформы, опорно-поворотного круга, нижней, ходовой и гусеничной рам, так как перечисленные конструкции работают совместно.
3.2. Выбор расчётной схемы зависит от конфигурации рассчитываемой конструкции.
Рассчитываемая металлоконструкция представляется идеализированной пространственной конструкцией, достаточно близкой к реальной, которая затем расчленяется на конечные элементы различной размерности (например, стержни и пластинки).
Пластинки могут быть различной формы (например, прямоугольные и треугольные).
3.3. Предполагается, что толщина t пластинки мала по сравнению с её линейными размерами в плане, а деформации пластинки малы по сравнению с её толщиной.
3.4. Отношение линейных размеров прямоугольных элементов не должно превышать 1:3. Треугольные элементы должны иметь форму, близкую к равностороннему треугольнику. Следует избегать тупых углов в ответственных местах конструкций.
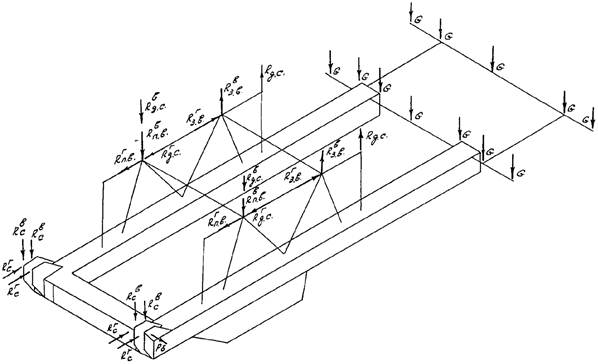
Черт. 2.9. Типовая схема нагружения.
G - весовые нагрузки; Rвз.в., Rвп.в., Rгз.в., Rгп.в. - горизонтальные и вертикальные
реакции в опорах вала заднего и вала переднего; Rвд.с.., Rгд.с. - горизонтальные и вертикальные
реакции в опорах двуногой стойки; Rвс, Rгс - горизонтальные и вертикальные реакции в проушинах
крепления стрелы; Рб - боковое усилие.
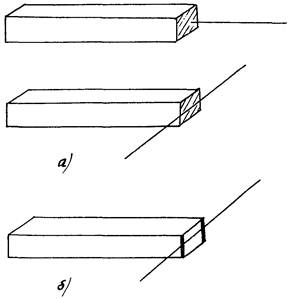
3.5. Более ответственные участки металлоконструкций на расчётной схеме разбиваются на более мелкие элементы, менее ответственные - на более крупные. Переходы от мелких элементов к крупным должны быть постепенными. Отверстия аппроксимируются многоугольниками, так как круглые пластины и кольцевые стержни в программах, реализующих МКЭ, отсутствуют.
На черт. 3.1 показаны примеры разбиения части настила поворотной платформы: а) без отверстия; б) с отверстием.
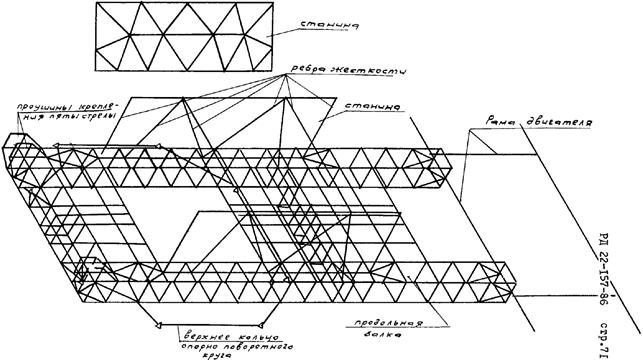
3.6. Проушины крепления пяты стрелы и станины механических экскаваторов всегда моделируются пластинчатыми конечно-элементными схемами, так как стержневая интерпретация этих узлов практически невозможна. Настилы и другие листовые узлы также представляются пластинчатой схемой.
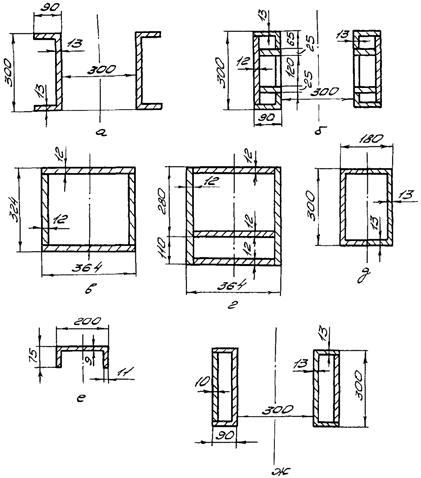
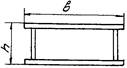
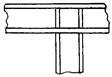
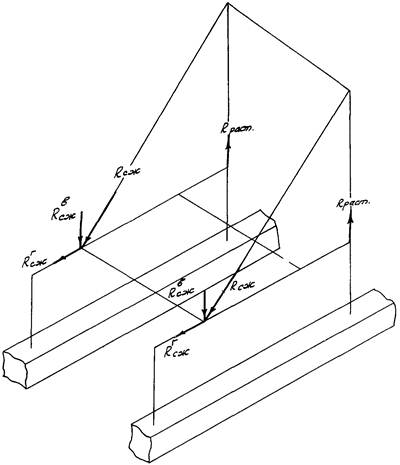
3.7. Продольные балки поворотных платформ
канатных экскаваторов следует аппроксимировать пластинами, если ширина
верхней полки в1 относится к ширине станины в2 как ![]() , так как стержневое моделирование
искажает реальное распределение нагрузки, не учитывая концентрацию напряжений в
средней части верхней полки (черт. 3.2).
, так как стержневое моделирование
искажает реальное распределение нагрузки, не учитывая концентрацию напряжений в
средней части верхней полки (черт. 3.2).
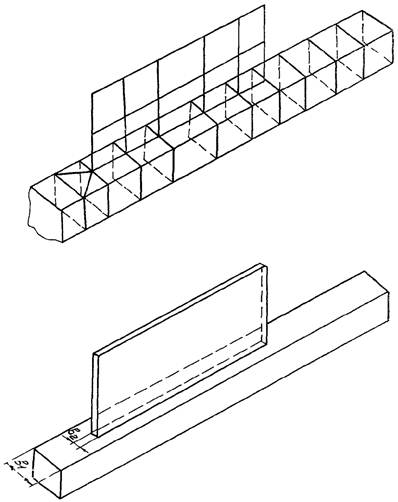
3.8. В расчётной схеме при стыковке балки, представленной пластинками, с балкой, моделируемой стержнем, для избежания нереальных деформаций необходимо вводить дополнительные конечные элементы большой жёсткости: пластины большой толщины (t = 50 мм) либо стержни, жёсткость которых равна жёсткости данной балки.
На черт. 3.3 а дополнительные конечные элементы заштрихованы, на черт. 3.3 б - выделены.
3.9. Ходовые рамы, представляющие собой листовые коробчатые конструкции, моделируются только пластинчатыми схемами.
3.10. Ходовые рамы, имеющие балочную конструкцию, рекомендуется моделировать стержневой конечно-элементной схемой.
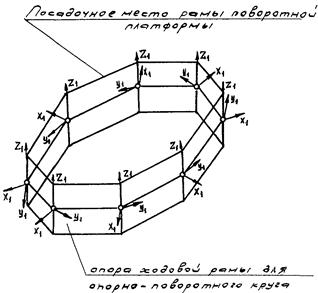
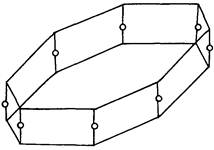
3.11. Верхнее и нижнее кольца опорно-поворотного круга аппроксимируют правильными многоугольниками (не менее, чем восьмиугольниками).
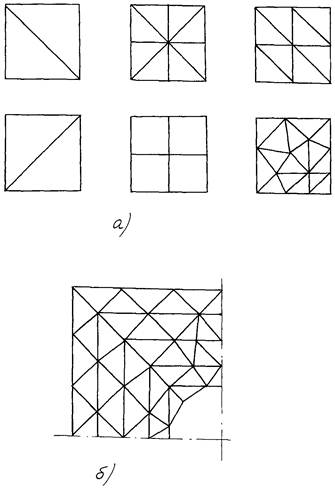
Черт. 3.1
Черт. 3.2
Черт. 3.3
Черт. 3.4
3.12. Взаимодействие верхнего и нижнего колец опорно-поворотного круга имитируется включением в расчетную схему абсолютно жестких стержней, соединяющих вершины многоугольников, аппроксимирующих верхнее и нижнее кольца опорно-поворотного круга (черт. 3.4). На этих стержнях должны быть соединения (на черт. 3.4 показаны кружками), которые в направлении, параллельном касательной к кольцу, допускают смещения, а в вертикальной плоскости, проходящей через радиус, представляют собой шарнир.
В случае, когда программа, реализующая МКЭ для ЭВМ, не позволяет разрешить свободу перемещения в направлении, параллельном касательной к кольцу для всех соединений, вводится система связей между верхним и нижним кольцами изображенная на рис. 3.5.
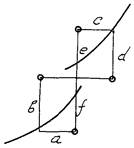
Черт. 3.5
В этой системе фиктивные стержни a, b, c, d абсолютно жесткие по отношению к изгибу, а стержни e и f по отношению к осевому усилию. Шарниры, соединяющие стержни сферические. Такая схема достаточно полно отражает особенности работы рассматриваемой системы. По кинематическим свойствам эти связи близки к связям, изображенным на черт. 3.4.
Для предотвращения нереальных деформаций в трех узлах верхнего кольца вводятся дополнительные связи (черт. 3.6).
Черт. 3.6. Расчетная схема верхнего и нижнего колец ОПК.
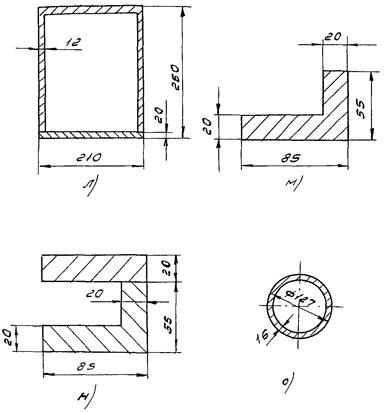
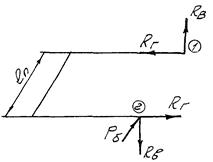
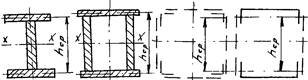
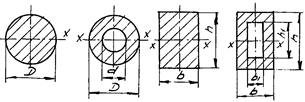
3.13. Балки, представляющие собой прямолинейные стержни переменного сечения, разбиваются на участки, в пределах которых можно принять момент инерции постоянным или принять общие размеры сечения (высоту; ширину) изменяющимися по линейному закону.
Приведенный момент инерции равен моменту инерции сечения на расстоянии l0 от конца участка с меньшими размерами сечения. Величины l0/l в зависимости от закона изменения момента инерции указаны в табл. 3.1.
Таблица 3.1
|
Закон изменения момента |
l0/l |
|
Линейный |
0,5 |
|
Квадратичный |
0,53 |
|
Кубический |
0,56 |
|
Четвертой степени |
0,58 |
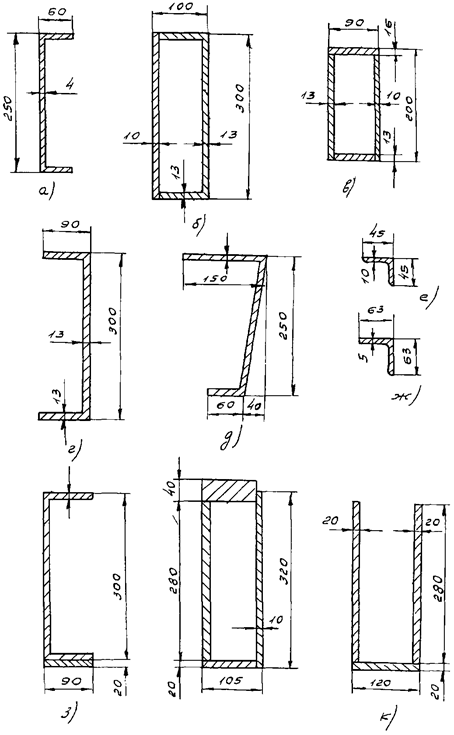
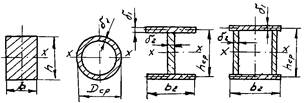
Типы сечений, характерные для различных законов изменения по длине стержня момента инерции, представлены в таблице 3.2
Таблица 3.2
|
Закон измерения |
Характерные типы сечений |
Соотношения размеров и законы их изменения |
|
Линейный |
|
b - меняется по линейному закону; h = const; δп = const δст = const; δст < δп |
|
Квадратичный |
|
h - меняется по линейному закону; Площадь поясов F = const Площадь стенок при наибольшей высоте меньше площади поясов |
|
Кубический |
|
h и Dср меняется по линейному закону; hср и b2 меняются одновременно по линейному закону, причем hср/b2 = const b1 = const, δ1 = const δ2 = const |
|
Четвертой степени |
|
D - меняется по линейному закону d = const
или h, b, h1, b1 одновременно возрастают по линейному |
3.14. Расчеты прочности следует проводить при положении рабочего оборудования вдоль хода, поперек хода и на угол хода экскаватора, так как в зависимости от положения рабочего оборудования меняется нагруженность металлоконструкций. При конструкциях ходовых рам, симметричных относительно горизонтальных осей, достаточно рассмотреть три положения рабочего оборудования относительно ходовой рамы:
1. Вдоль хода в сторону задней поперечной балки (заднего моста) или в сторону передней поперечной балки (переднего моста);
2. Поперек хода в любую сторону;
3. На любой угол хода.
При симметрии конструкции только относительно продольной оси работу вдоль хода и на угол хода необходимо рассматривать как в сторону передней балки, так и в сторону задней балки.
3.15. Опорными узлами в расчетных схемах являются опоры ходового устройства. Закрепление опор принимается жестким, так как при жестком закреплении в конструктивных узлах возникают наибольшие напряжения.
Для гусеничных машин точками опоры являются направляющие, ведущие колеса и опорные катки.
Для колесных две пары аутригеров, либо колеса и аутригеры (в зависимости от конструкции ходового устройства).
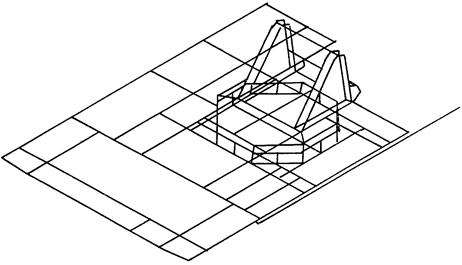
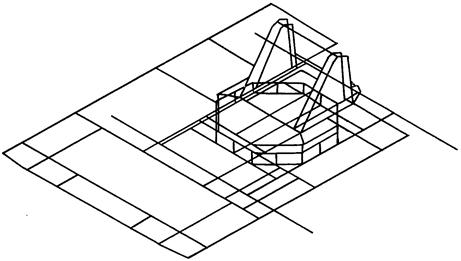
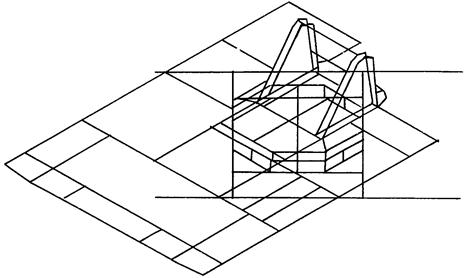
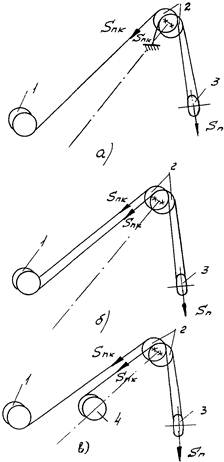
Для канатных машин при положении рабочего оборудования вдоль хода и поперек хода расчет ведется для случая опирания на две пары колес: передние и задние (черт. 3.7 а), при работе на угол хода опора, противоположная направлению рабочего оборудования, вывешивается (черт. 3.7 б).
Для гидравлических гусеничных машин при положении рабочего оборудования вдоль хода расчет ведется для случаев опирания на две пары колес: передние и задние (черт. 3.7 а) и на одну пару колес и одну пару катков (черт. 3.7 в), так как при экскавации грунта может происходить задирание передней или задней части гусениц.
При работе поперек хода опорными точками являются две пары колес (черт. 3.7 а) и колеса гусеницы, расположенной со стороны рабочего оборудования (черт. 3.7 г).
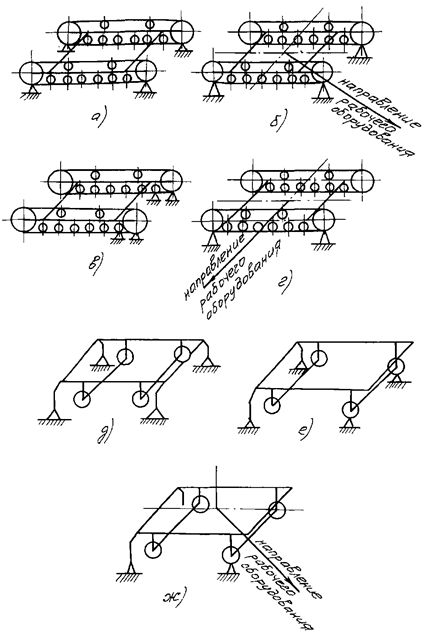
Черт. 3.7
При работе на угол хода опора, противоположная направлению рабочего оборудования, вывешивается (черт. 3.7 б).
Для гидравлических колесных машин при положении рабочего оборудования вдоль хода и поперек хода расчет ведется для случая опирания на две пары аутригеров, при отсутствии в конструкции одной пары аутригеров - на одну пару колес и аутригеры (черт. 3.7 д, е), и для случая вывешивания опор противоположных направлению рабочего оборудования.
При работе на угол хода опора противоположная направлению рабочего оборудования вывешивается (черт. 3.7 ж).
4. ПРОВЕРКА УСТОЙЧИВОСТИ
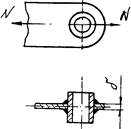
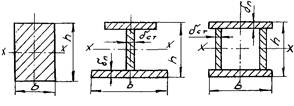
4.1. Устойчивость стенок конструкций не требуется проверять, если при выполнении условий (1.2), (1.5) условная гибкость стенок
|
|
(4.1) |

где h и t соответственно высота и толщина рассматриваемой стенки (черт. 4.1), не превышает значений:
3,2 - при отсутствии местных напряжений;
2,5 - при наличии местных напряжений и отсутствии подкрепления стенки.
Если значение условной гибкости стенки λс превышает указанные выше величины, следует провести расчет устойчивости стенок в соответствии с рекомендациями СНиП II-23-81 (пункты 7.4; 7.6)
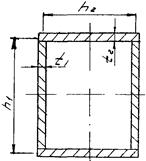
Черт. 4.1
Устойчивость сжатых поясов коробчатого сечения проверяется в соответствии с пунктом 6.11 РД 22-158-86 «Экскаваторы одноковшовые гидравлические. Рабочее оборудование. Расчет металлоконструкций на статическую прочность».
5. ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
σпр - приведенное расчетное сопротивление в элементе, МПа;
σ - нормальные напряжения, МПа;
τ - касательные напряжения, МПа;
Ry - расчетное сопротивление стали растяжению, сжатию, изгибу по пределу текучести, МПа;
Rs - расчетное сопротивление стали сдвигу, МПа;
m - коэффициент условий работы;
K - коэффициент перегрузки;
N - продольная сила, Н;
Mx, My - изгибающие моменты относительно осей х и у, Н;
Qх, Qy - поперечные силы, действующие в плоскостях, параллельных осям х и у, Н;
t - толщина стенки сечения, пластинки, м (см, мм);
Мк - крутящий момент, Н;
hп, hc - размеры по осям стенок сечения, см, мм;
Po - усилие сопротивления грунта копанию, Н;
Рб - боковая сила, приложенная к зубу ковша, Н;
Fл, Fп - усилия в левой и правой проушинах поворотной платформы гидравлических экскаваторов от Po, Н;
R1, R2 - усилия, возникающие в проушинах поворотной платформы от приложения Po к крайнему зубу ковша, Н;
lк - ширина ковша, м (см, мм);
lп - расстояние между проушинами крепления пяты стрелы, м (см, мм);
![]() ,
, ![]() - суммарные векторы усилий в левой и
правой проушинах поворотной платформы гидравлических экскаваторов, Н;
- суммарные векторы усилий в левой и
правой проушинах поворотной платформы гидравлических экскаваторов, Н;
Мп - крутящий момент механизма поворота, приведенный к оси вращений экскаватора, л;
lб - расстояние от оси вращения экскаватора до зубьев ковша, м (см, мм);
lп.с. - расстояние от оси вращения до пяты стрелы, м (см, мм);
a, b, c, r - линейные размеры, определяющие положение рабочего оборудования, м (см, мм);
Мб - момент от боковой силы Рб, м;
Мг, Мв - моменты, действующие в горизонтальной и вертикальной плоскостях соответственно, м;
U, V - реакции в пяте стрелы канатных экскаваторов, Н;
lc - длина стрелы, м (см, мм);
Sп - усилие на блоке ковша, Н;
Sн - усилие напора или возврата, Н;
Gс, Gбл, Gнм - веса стрелы, блоков головы стрелы и напорного механизма, Н;
Sнз - усилие в цепи привода напора или в напорных канатах, Н;
Sпк - усилие в подъемном канате, Н;
i - кратность полиспаста механизма подъема ковша;
rп - к.п.д. полиспаста механизма подъема;
rбл - радиус головных блоков стрелы, м (см, мм);
Sпс - усилие в подвеске стрелы, Н;
lнв - расстояние от пяты стрелы до напорного вала (напорной оси), м (см, мм);
Sк - усилие в ветвях полиспаста, Н;
n - количество ветвей полиспаста.
Rгл, Rгп - горизонтальные усилия от боковой силы Рб, действующие в проушинах крепления стрелы, Н;
Rвл, Rвп - вертикальные усилия от силы Рб, действующие в проушинах крепления пяты стрелы, Н;
E - модуль упругости, МПа;
ν - коэффициент Пуассона.
Программы, реализующие МКЭ, и инструкции по их использованию могут быть переданы ВНИИстройдормашем организациям отрасли в установленном порядке.
ПРИЛОЖЕНИЕ 1
Расчетные сопротивления проката
|
Марка стали |
ГОСТ или ТУ |
Вид проката |
Толщина* проката, мм |
Расчетное сопротивление по пределу текучести. МПа (кгс/мм2); |
|
1 |
2 |
3 |
4 |
5 |
|
ВСт3сп5-1 |
Лист |
4 - 10 |
240 (2450) |
|
|
ВСт3Гпс5-1 |
-"- |
-"- |
-"- |
-"- |
|
ВСт3сп5-1 |
-"- |
11 - 20 |
230 (2350) |
|
|
ВСт3Гпс5-1 |
-"- |
-"- |
-"- |
-"- |
|
ВСт3сп5-1 |
Фасон |
4 - 10 |
250 (2550) |
|
|
ВСт3Гпс5-1 |
-"- |
-"- |
-"- |
-"- |
|
ВСт3сп5-1 |
-"- |
11 - 20 |
240 (2450) |
|
|
ВСт3Гпс5-1 |
-"- |
-"- |
-"- |
-"- |
|
ВСт3сп5-1 |
-"- |
21 - 30 |
230 (2350) |
|
|
ВСт3Гпс5-1 |
-"- |
-"- |
-"- |
-"- |
|
ВСт3сп5 |
Лист |
4 - 20 |
225 (2300) |
|
|
ВСт3Гпс5 |
-"- |
-"- |
-"- |
-"- |
|
Вст3сп |
Лист |
21 - 40 |
215 (2200) |
|
|
ВСт3Гпс |
-"- |
-"- |
-"- |
-"- |
|
Вст3сп5 |
Фасон |
4 - 20 |
235 (2400) |
|
|
ВСт3Гпс5 |
Фасон |
4 - 20 |
235 (2400) |
|
|
ВСт3сп |
-"- |
-"- |
21 - 40 |
215 (2200) |
|
ВСт3Гпс |
-"- |
-"- |
-"- |
-"- |
|
09Г2Сгр.1 |
Лист |
4 - 10 |
335 (3400) |
|
|
09Г2Сгр.1 |
Фасон |
4 - 10 |
335 (3400) |
|
|
09Г2Сгр.1 |
Лист |
11 - 20 |
315 (3200) |
|
|
09Г2Сгр.1 |
Фасон |
11 - 20 |
315 (3200) |
|
|
09Г2Сгр.1 |
-"- |
21 - 30 |
300 (3050) |
|
|
09Г2С |
Лист |
21 - 32 |
290 (2950) |
|
|
09Г2С |
Лист |
4 - 9 |
330 ( 3350) |
|
|
09Г2С |
-"- |
10 - 20 |
310 (3150) |
|
|
09Г2С |
Фасон |
4 - 9 |
330 (3350) |
|
|
09Г2С |
-"- |
10 - 20 |
310 (3150) |
|
|
09Г2С |
-"- |
21 - 32 |
290 (2950) |
|
|
09Г2С |
ТУ 14-3-5000-76 |
Труба |
8 - 15 |
250 (2550) |
|
10Г2С1 |
Лист |
4 |
340 (3450) |
|
|
10Г2С1 |
Фасон |
4 |
340 (3450) |
|
|
10Г2С1 |
Лист |
5 - 9 |
330 (3350) |
|
|
10Г2С1 |
Фасон |
5 - 9 |
330 (3350) |
|
|
10Г2С1 |
Лист |
10 - 20 |
320 (3250) |
|
|
10Г2С1 |
Фасон |
10 - 20 |
320 (3250) |
|
|
10Г2С1 |
Лист |
21 - 32 |
310 (3150) |
|
|
10Г2С1 |
Фасон |
21 - 32 |
310 (3150) |
|
|
10Г2С1 термоупр. |
-"- |
10 - 40 |
355 (3600) |
|
|
10ХСНД |
Фасон |
4 - 15 |
355 (3600) |
|
|
10ХСНД |
Лист |
4 - 32 |
355 (3600) |
|
|
10ХСНД |
-"- |
33 - 40 |
355 (3600) |
|
|
15ХСНД |
Лист |
4 - 32 |
330 (3350) |
|
|
15ХСНД |
Фасон |
4 - 9 |
330 (3350) |
|
|
15ХСНД |
-"- |
10 - 32 |
310 (3150) |
|
|
14Г2АФ |
Лист |
4 - 50 |
370 (3750) |
|
|
15Г2АФДпс |
-"- |
4 - 32 |
355 (3600) |
|
|
15Г2СФ термоупр. |
Лист |
10 - 32 |
400 (4100) |
|
|
16Г2АФ |
ТУ 14-3-567-76 |
-"- |
6 - 9 |
400 (4100) |
|
16Г2АФ |
ТУ 14-3-829-79 |
-"- |
16 - 40 |
320 (3250) |
|
16Г2АФ |
-"- |
4 - 32 |
400 (4100) |
|
|
16Г2АФ |
-"- |
33 - 50 |
375 (3800) |
|
|
18Г2АФпс |
-"- |
4 - 32 |
400 (4100) |
|
|
14Х2ГМР5 |
ТУ 14-1-1156-74 |
Лист |
10 - 50 |
510 (5200) |
|
12ХН2МФАЮ |
ТУ 14-1-1772-76 |
Лист |
16 - 40 |
510 (5200) |
|
14X2ГM |
ТУ 14-1-2659-79 |
Лист |
10 - 30 |
510 (5200) |
|
14ХГМЕД |
ТУ 14-1-2659-79 |
Лист |
3 - 30 |
600 (6100) |
ПРИМЕЧАНИЕ: * - Значения расчетных сопротивлений получены делением нормативных сопротивлений, МПа, на коэффициенты надежности по материалу, определяемые в соответствии с таблицей 2 СНиП II-23-81 и округлением до 5 МПа, значения расчетных сопротивлений, кГс/см2, получены путем деления расчетных сопротивлений, МПа, на коэффициент 0,0980665.
ПРИЛОЖЕНИЕ 2
Расчет на прочность рамы поворотной платформы
и ходовой рамы экскаватора ЭО-4125
Расчет на прочность рамы поворотной платформы и ходовой рамы экскаватора ЭО-4125 выполнен по чертежам экскаватора на ЭЦВМ методом конечных элементов по программе DIANA.
Целью расчета являлось исследование характера нагружения рамы поворотной платформы и ходовой рамы при различных случаях работы экскаватора и выявление наиболее нагруженных участков конструкции.
Обе рамы рассматривались как единая конструкция, внешние нагрузки были приложены к проушинам крепления пяты стрелы и проушинам крепления цилиндров стрелы, а опорами конструкции являлись опорные узлы ходовой рамы.
Рассматривались три случая расположения рамы поворотной платформы относительно ходовой рамы: в первом случае рама поворотной платформы располагалась вдоль хода экскаватора, во втором случае - поперек хода экскаватора, в третьем случае - под углом 45° к продольной оси экскаватора.
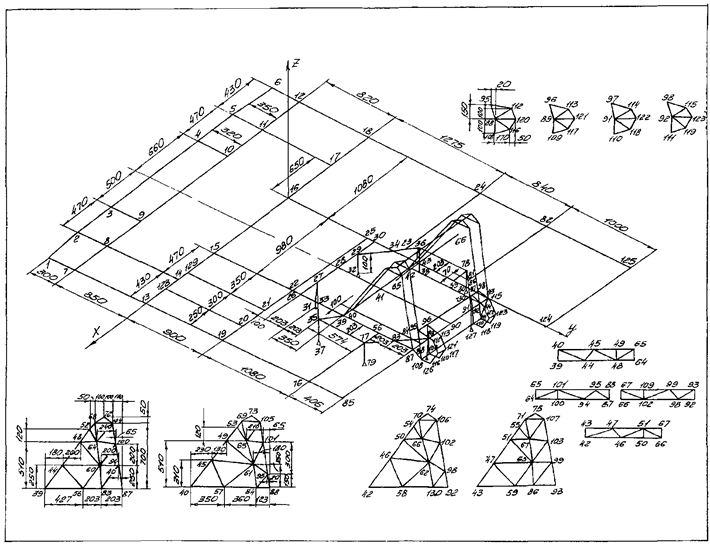
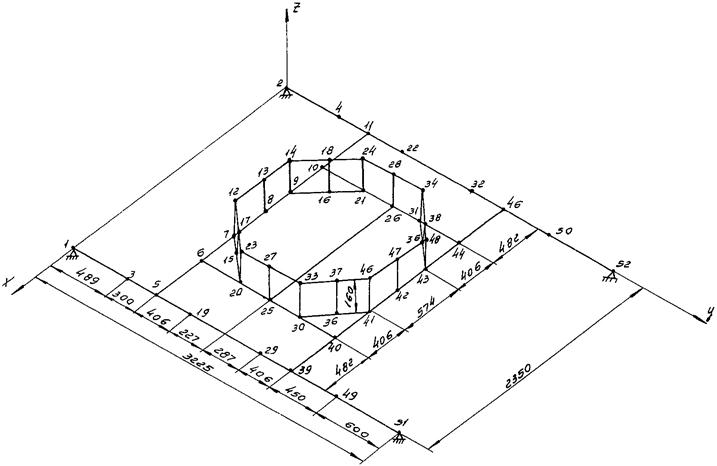
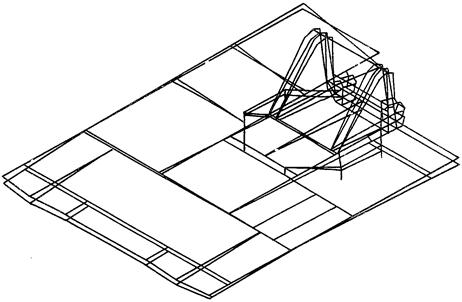
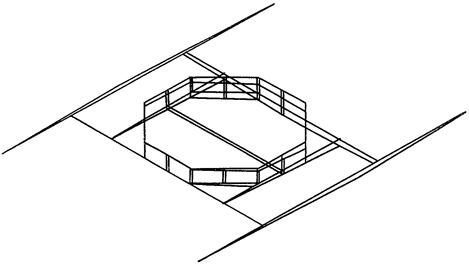
Обе рамы рассматривались как конструкции, состоящие из конечных элементов: стержней определенного сечения и пластин определенной толщины. Схема рамы поворотной платформы представлена на черт. П.2.1. Схема ходовой рамы представлена на черт. П.2.2.
Металлоконструкция рамы поворотной платформы состоит из двух продольных балок коробчатого сечения (на схеме рамы они представлены стержнями 15-22-26-33-39 и 16-25-30-34-43), продолжением которых являются балки (стержни 39-56-83-87 и 43-59-86-93) с приваренными к ним по бокам четырьмя мощными ребрами толщиной 20 мм для крепления пяты стрелы. Вышеуказанные продольные балки с одной стороны соединены поперечной балкой в виде швеллера (стержень 22-25), с другой стороны соединены поперечной балкой коробчатого сечения (стержни 87-88-89-90-91-92-93), к которой приварены сбоку четыре ребра толщиной 20 мм для крепления цилиндров стрелы.