ГОСТ Р 51747-2001
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
СИСТЕМА ИНСТРУМЕНТАЛЬНОГО ЗАХОДА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ПОСАДКУ
САНТИМЕТРОВОГО ДИАПАЗОНА ВОЛН
РАДИОМАЯЧНАЯ
Основные параметры и методы измерений
ГОССТАНДАРТ РОССИИ
Москва
Предисловие
1 РАЗРАБОТАН Всероссийским научно-исследовательским институтом радиоаппаратуры
ВНЕСЕН Акционерным обществом открытого типа «Центральный научно-исследовательский институт радиоэлектронных систем»
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 15 мая 2001 г. № 206-ст
3 Стандарт разработан с учетом требований «Конвенции ИКАО о гражданской авиации» (приложение 10, 1996 г.)
4 ВВЕДЕН ВПЕРВЫЕ
СОДЕРЖАНИЕ
ГОСТ Р 51747-2001
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
СИСТЕМА ИНСТРУМЕНТАЛЬНОГО ЗАХОДА ЛЕТАТЕЛЬНЫХ АППАРАТОВ
НА ПОСАДКУ
САНТИМЕТРОВОГО ДИАПАЗОНА ВОЛН РАДИОМАЯЧНАЯ
Основные параметры и методы измерений
Microwave radio beacon instrument approach landing system for air
vehicles.
Main parameters and methods of measuring
Дата введения 2002-01-01
1 Область применения
Настоящий стандарт распространяется на радиомаячную систему инструментального захода летательных аппаратов (далее - ЛА) на посадку сантиметрового диапазона волн, состоящую из угломерных комплексов сантиметрового диапазона волн, определяющих азимуты и углы места по интервалу времени между облучениями бортовой антенны сканирующими лучами радиомаяков для передачи основных и вспомогательных данных, и комплекса дециметрового диапазона, использующего метод «запрос борта - ответ земли» для определения расстояния.
Стандарт устанавливает основные параметры системы и методы их измерений.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 26.003-80 Система интерфейса для измерительных устройств с байт-последовательным, бит-параллельным обменом информацией. Требования к совместимости
ГОСТ 26566-85 Система инструментального захода летательных аппаратов на посадку сантиметрового диапазона волн радиомаячная. Термины и определения
3 Сокращения
В настоящем стандарте применяют следующие сокращения:
АРМ - азимутальный радиомаяк;
АРУ - автоматическое регулирование усиления;
ВОР - всенаправленный радиомаяк, работающий в диапазоне сверхвысоких частот;
ВПП - взлетно-посадочная полоса;
ДМЕ - радиодальномерная система, состоящая из наземного и бортового оборудования;
ДФМС - дифференциальная фазовая манипуляция сигналов;
ИКАО - международная организация гражданской авиации;
ИЛС - система инструментальной посадки метрового диапазона волн;
КЭП - конечный этап захода ЛА на посадку;
МЛС - радиомаячная система инструментального захода ЛА на посадку сантиметрового диапазона волн;
НРД - наземный ретранслятор дальномера;
НРД/П - наземный ретранслятор дальномера прецизионный (или посадочный);
НРД/Н - наземный ретранслятор дальномера навигационный;
НЭП - начальный этап захода ЛА на посадку;
ПАЛ - передвижная лаборатория для проверки выходных характеристик наземных угломерных радиомаяков на малых высотах;
ПСТ - погрешность следования по траектории;
РСБН - радиотехническая система ближней навигации;
РУВК - радиомаяк ухода на второй круг;
СИПВЗН - сигналы индикации о пребывании вне зоны наведения;
УРМ - угломестный радиомаяк;
ХИП - хаотичная импульсная помеха;
ШСТ - шумы следования по траектории;
ШСУ - шумы системы управления.
Соответствие сокращений на русском языке английским аналогам по ИКАО приведено в приложении А.
4 Общие положения
4.1 Назначение системы
Система предназначена для обеспечения точной информации о координатах ЛА при заходе на посадку при любых погодных условиях.
4.2 Состав оборудования системы
4.2.1 Система включает наземные и бортовые устройства, обеспечивающие определение местоположения ЛА по отношению к взлетно-посадочной полосе и передачу на ЛА основных и вспомогательных данных.
4.2.2 В состав наземного оборудования МЛС должны входить:
- азимутальный радиомаяк с устройством передачи основных данных и связанной с ним аппаратурой контроля, дистанционного управления и индикации;
- угломестный радиомаяк с аппаратурой контроля, дистанционного управления и индикации;
- наземный ретранслятор дальномера с аппаратурой контроля, дистанционного управления и индикации;
- устройство дистанционного управления с аппаратурой передачи данных, контроля и индикации, установленное на командно-диспетчерском пункте.
Примечание - Для обеспечения точной информации о дальности во всей зоне наведения по азимуту следует использовать НРД/П. Если точная дальномерная информация не требуется, вместо НРД/П допускается использовать менее точный НРД/Н.
Для усовершенствования характеристик указанного выше основного оборудования МЛС допускается включать в ее состав одно или несколько из нижеперечисленных устройств:
- радиомаяк ухода на второй круг с устройством передачи слов основных данных и связанной с ним аппаратурой контроля, дистанционного управления и индикации;
- угломестный радиомаяк выравнивания с аппаратурой контроля, дистанционного управления и индикации;
- устройство для передачи слов вспомогательных данных с аппаратурой контроля, дистанционного управления и индикации;
- устройство для обеспечения более широкого сектора пропорционального наведения, который превышает минимальный сектор пропорционального наведения, равный ± 10°.
Примечание - Формат сигнала МЛС позволяет осуществлять дальнейшее развитие системы и включение в ее состав дополнительных устройств, например устройства наведения по азимуту в пределах 360°.
4.2.3 Бортовое устройство системы МЛС должно состоять из:
- антенно-фидерных модулей, обеспечивающих прием сигналов угломерного устройства, а также прием и передачу сигналов радиодальномера;
- угломерного приемника, обеспечивающего прием и преобразование сигналов наземных устройств в сигналы информации об угловых координатах, основных и вспомогательных данных;
- запросчика радиодальномера, обеспечивающего передачу запросных сигналов, прием ответных сигналов и выделение информации о наклонной дальности до НРД.
Примечание - На конкретном ЛА допускается размещение дополнительного бортового оборудования.
4.2.4 Контрольно-проверочная аппаратура системы МЛС должна состоять из:
- имитатора сигналов угломерных радиомаяков;
- имитатора сигналов радиодальномера;
- передвижной лаборатории для проверки выходных характеристик наземных угломерных радиомаяков на малых высотах;
- самолета-лаборатории.
Примечание - Допускается использовать одну ПАЛ и один самолет-лабораторию для обслуживания нескольких систем МЛС. Методика испытаний должна быть приведена в технических условиях на конкретную систему МЛС.
5 Основные параметры
5.1 Основные параметры системы МЛС
5.1.1 Наземные угломерные устройства и НРД системы МЛС должны излучать сигналы для определения угловых координат ЛА и передачи данных на одной из частот, указанных в таблице Б.1 приложения Б.
5.1.2 Спаривание частот сигналов каналов, излучаемых для определения угловых координат, и частот сигналов ДМЕ должно осуществляться в соответствии с таблицей Б.1.
5.1.3 Частоты сигналов, излучаемых для определения угловых координат ЛА и передачи данных, должны отличаться не более чем на ± 10 кГц от частот, установленных в таблице Б.1.
Примечание - Рекомендуемые последовательности сигналов, излучаемых угломерными устройствами, приведены в таблицах В.1, В.2 и на рисунке В.1 приложения В.
5.1.9 Частота обновления сигналов каждого из указанных видов обслуживания должна соответствовать указанной в таблице 1.
Таблица 1
|
Частота обновления сигналов, Гц, средняя за 10 с |
|
|
Определение азимута захода на посадку |
13,0 ± 0,5 |
|
Определение азимута захода на посадку с высокой частотой обновления сигналов |
39,0 ± 1,5 |
|
Определение азимута ухода на второй круг |
6,50 ± 0,25 |
|
Определение угла места захода на посадку и при выравнивании |
39,0 ± 1,5 |
|
Основные данные |
По таблице Б.10 |
|
Вспомогательные данные |
В случаях, когда сектор пропорционального наведения не превышает ± 40° и не предусматривается применение устройства определения угла места при выравнивании устройства наведения по азимуту при уходе на второй круг или других дополнительных устройств, следует применять устройство наведения по азимуту захода на посадку с высокой частотой обновления сигналов.
5.1.10 Размещение во времени элементов сигнала, используемого для определения вида обслуживания, приведено в таблицах Б.2 - Б.8.
Погрешность размещения во времени элементов сигнала не должна превышать ± 2 мкс, а среднее квадратическое значение отклонения фронтов элементов не должно превышать 1 мкс.
5.1.11 Предварительные сигналы (преамбула) должны передаваться по всей зоне наведения системы посадки для определения вида обслуживания и состоять из сигналов немодулированной несущей частоты для синхронизации гетеродина приемника, кода опорного времени и кода опознавания вида обслуживания. Размещение элементов преамбулы во времени приведено в таблице Б.2.
5.1.12 Коды преамбулы, а также сигналы основных и вспомогательных данных должны передаваться классом излучения Д1Д с помощью ДФМС несущей частоты. Логическому 0 соответствует переброс фазы на 0° ± 10°, а логической 1 - переброс фазы на 180° ± 10° между соседними посылками (тактами). Частота перебросов - 15625 Гц, а точность моментов перебросов должна соответствовать погрешности размещения во времени элементов сигнала, указанной в 5.1.10.
Примечание - Класс излучения определен по регламенту [2].
5.1.13 Фазовые перебросы ДФМС, убывание мощности излучения должны соответствовать требованиям 5.1.5.
5.1.14 В составе сигналов преамбулы должен содержаться код опорного времени 11101 (I1 - I5), в котором опорным временем является момент последнего переброса фазы.
5.1.15 Код опознавания вида обслуживания должен состоять из пяти информационных тактов (I6 - I10), которые позволяют обозначить 31 вид обслуживания, а также двух тактов четности (I11 - I12). Принятые в системе МЛС коды опознавания приведены в таблице Б.11.
5.1.16 Информация об угле должна кодироваться величиной временного интервала между центрами принятых главных лепестков сканирующего луча в направлениях «Туда» и «Обратно». В бортовом устройстве этот код расшифровывается по формуле
![]()
где Θ - азимут или угол места, ...°;
Т0 - интервал времени между центрами главных лепестков сканирующего луча в направлениях «Туда» и «Обратно» при размещении приемной антенны на направление 0°, мкс;
t - интервал времени между центрами главных лепестков сканирующего луча в направлении «Туда» и «Обратно», мкс;
v - постоянная скорость сканирования луча, ...°/мкс.
5.1.17 Параметры режима сканирования лучей наземных устройств должны соответствовать значениям, приведенным в таблице 2.
Таблица 2
|
Т0, мкс |
Скорость сканирования v, ...°/мкс |
Углы сканирования и интервалы времени, максимально возможные по формату сигнала |
||
|
Θ |
t, мкс |
|||
|
Наведение по азимуту захода на посадку |
6800 |
0,020 |
От -62° до +62° |
13000 |
|
Наведение по азимуту захода на посадку с высокой частотой обновления сигналов |
4800 |
0,020 |
От -42° до +42° |
9000 |
|
Наведение по азимуту при уходе на второй круг |
4800 |
0,020 |
От -42° до +42° |
9000 |
|
Наведение по углу места при заходе на посадку |
3350 |
0,020 |
От -1,5° до +29,5° |
3500 |
|
Наведение по углу места при выравнивании |
2800 |
0,010 |
От -2° до +10° |
3200 |
|
Примечание - В промежутке между окончанием сканирования в направлении «Туда» и началом сканирования в направлении «Обратно» наступает пауза, в течение которой наземная установка сигналов не излучает. Во время паузы ослабление сигнала должно быть достаточным, чтобы не создавать помех в работе бортового оборудования (5.2.1). Середина паузы должна совпадать со средней точкой сканирования, указанной в таблицах Б.3 - Б.6, с погрешностью не более ± 10 мкс. |
||||
5.1.18 Каждый цикл сканирования лучом антенны для определения угла должен состоять из сканирования лучом антенны в направлении «Туда» и последующим сканированием в направлении «Обратно». Луч антенны радиомаяка для определения азимута захода на посадку должен сканировать в направлении «Туда» в сторону увеличения углов, а луч антенны радиомаяка для определения азимута ухода на второй круг должен сканировать в направлении «Туда» в сторону уменьшения углов. Сканирование в направлении «Обратно» должно проводиться в противоположную сторону. Направление нулевых углов обоих устройств должно совпадать с направлением оси ВПП, если их антенны установлены на оси ВПП (5.2.8.2). Условия сканирования указаны на рисунке Г.1 приложения Г.
5.1.19 Формат сигнала любого радиомаяка для наведения по азимуту должен содержать секторные сигналы, которые состоят из:
- сигналов, образующих код Морзе для опознавания наземного устройства;
- сигналов выбора бортовой антенны;
- контрольного сигнала «Туда», излучаемого с наземного оборудования системы МЛС;
- сигналов СИПВЗН, согласно таблицам Б.3 - Б.5.
5.1.19.2 Сигнал выбора бортовой антенны должен передаваться вслед за тактом кода Морзе шестью тактами ДФМС с «нулевым» перебросом фазы. Этот сигнал должен излучаться по всему сектору наведения.
- за пределами зоны наведения сигналы СИПВЗН должны быть больше любого угломерного сигнала;
- в левом и правом секторах клиренсного наведения (рисунок Г.1) сигналы СИПВЗН должны быть меньше соответствующих клиренсных сигналов не менее чем на 5 дБ;
- в секторе пропорционального наведения сигнал сканирующего луча должен превышать сигналы СИПВЗН более чем на 5 дБ.
Длительность каждого из сигналов СИПВЗН должна быть не менее 100 мкc, а длительности его фронтов и срезов должны быть не более 10 мкc каждый.
5.1.19.14 Допускается вместо сигнала СИПВЗН, указанного в 5.1.19.3, формировать сигнал внезонной индикации в том же интервале времени, состоящий из двух импульсов длительностью не менее 50 мкc каждый с длительностью фронтов и срезов не более 10 мкc.
5.1.19.5 В формате сигналов устройства определения азимута должны быть предусмотрены промежутки времени для контрольных сигналов, которые предназначены для использования в будущем.
Клиренсные сигналы должны излучаться в секторах между границами сектора пропорционального наведения и границами полного сектора наведения данного радиомаяка.
5.1.20.1 Наведение по клиренсному сигналу в случае применения импульсов, разнесенных во времени, должно осуществляться путем передачи пар импульсов за пределами используемого времени углового сканирования. Первая пара импульсов должна состоять из одного импульса, граничащего с началом сканирования в направлении «Туда», и импульса, граничащего с концом сканирования в направлении «Обратно». Вторая пара импульсов должна состоять из одного импульса, граничащего с концом сканирования в направлении «Туда», и импульса, граничащего с началом сканирования в направлении «Обратно».
В сигналах наведения по азимуту захода на посадку первая пара импульсов (правый клиренсный сигнал) должна обозначать «Лети влево», а вторая пара импульсов (левый клиренсный сигнал) должна обозначать «Лети вправо». Такой же смысл имеют пары импульсов в сигналах радиомаяка наведения по азимуту захода на посадку с высокой частотой обновления сигналов. В сигналах радиомаяка наведения по азимуту ухода на второй круг пары сигналов имеют обратный смысл.
На рисунке Г.2 приведены диаграммы размещения во времени клиренсных сигналов в излучении радиомаяка наведения по азимуту захода на посадку и ухода на второй круг.
5.1.20.2 Длительность импульсов клиренсного сигнала должна быть (50 ± 5) мкc, а время переключения передатчика с антенны сканирующего луча на антенну клиренсного сигнала должно быть не более 10 мкс. Фронт или срез импульсов клиренсного сигнала, не граничащий со сканирующим лучом, должен быть не более 10 мкс.
Условия сканирования лучей антенны устройств наведения по углу места захода на посадку показаны на рисунке Г.3.
- больше любого сигнала сканирующего луча за пределами сектора пропорционального наведения;
- не менее чем на 5 дБ меньше сигнала сканирующего луча в секторе пропорционального наведения.
Длительность импульсов индикации о пребывании вне зоны наведения должна быть не более 100 мкс, а длительность его фронта и среза - не более 10 мкс.
5.1.22.1 В случае необходимости импульс индикации о пребывании вне зоны наведения должен излучаться в том же интервале времени последовательно двумя импульсами длительностью не более чем по 50 мкс каждый с фронтами и срезами длительностью не более 10 мкс. Размещение во времени элементов сигнала наведения по углу места захода на посадку приведено в таблице Б.5.
5.1.23 Если не оговорено особо, приводимые ниже погрешности должны соблюдаться с 95 %-ной вероятностью. Погрешности системы МЛС, указанные ниже, включают погрешности от всех источников (бортового устройства, наземного устройства) и условий распространения сигналов.
5.1.25 Высота опорной точки азимута ухода
на второй круг должна быть ![]() м от уровня середины ВПП.
м от уровня середины ВПП.
5.1.26 Погрешности определения азимута ЛА при заходе на посадку с нормальной и высокой частотой обновления сигналов не должны превышать в опорной точке значений, приведенных в таблице 3.
Таблица 3
|
Допускаемая погрешность наведения, м |
|||
|
ПСТ |
ШСТ |
ШСУ |
|
|
Наведение по азимуту захода на посадку с высокой частотой обновления сигналов |
± 6 |
± 3,5 |
± 3,2 или 0,1°* |
|
Наведение по азимуту ухода на второй круг |
± 6 |
± 3,5 |
± 3,2 или 0,1°* |
|
Наведение по углу места при заходе на посадку |
± 0,6 |
± 0,4 |
± 0,3 |
|
Наведение по углу места при выравнивании |
± 0,6 |
± 0,4 |
± 0,3 или 0,07°* |
|
* Выбирают меньшее значение. |
|||
5.1.26.1 Линейная погрешность, указанная в таблице 3 для опорной точки, должна выдерживаться в зоне ВПП, которая определена в 5.2.4.1, а в остальном секторе наведения допускается увеличение допускаемых погрешностей, указанных в 5.1.26.2.
- допуск на погрешности наведения ПСТ, ШСТ и ШСУ при изменении углов места в интервале от нижней границы зоны наведения и до 9° при неизменных азимуте и дальности не изменяется;
- при движении над продолжением оси ВПП по прямой линии, проходящей через фазовый центр антенны радиомаяка наведения по азимуту и опорную точку захода на посадку, допуски на погрешности ПСТ и ШСТ увеличиваются пропорционально дальности от порога ВПП так, что на удалении 37 км они превышают в 2 раза их значения в опорной точке, а допуск на погрешность ШСУ увеличивается в 1,3 раза на удалении 18,5 км от опорной точки; на других азимутах изменение допусков на погрешности ПСТ, ШСТ и ШСУ при изменении дальности от порога ВПП происходит так же;
- при изменении азимута и неизменных расстоянии и угле места допуски на погрешности изменяются так, что на азимутах ± 40° допуски на погрешности ПСТ и ШСТ возрастают в 1,5 раза по сравнению с их значениями на азимуте 0° на том же удалении, а допуск на погрешность ШСУ возрастает в 1,3 раза (вершина азимутальных углов лежит в точке начала отсчета системы МЛС);
- при увеличении углов места от 9° до 15° (вершина угла места лежит в фазовом центре антенны радиомаяка наведения по азимуту) и при неизменных азимуте и дальности допуски на погрешности ПСТ и ШСТ возрастают пропорционально углу места так, что при угле места 15° они увеличиваются в 2 раза по сравнению с их значением при угле места 9° и том же расстоянии и азимуте, а допуск на погрешность ШСУ с изменением угла места не изменяется.
5.1.27 Погрешности наведения ЛА по азимуту при уходе на второй круг не должны превышать в опорной точке ухода на второй круг значений, приведенных в таблице 3.
5.1.27.1 К границам зоны наведения ЛА по азимуту при уходе на второй круг разрешается монотонное увеличение допусков на погрешности наведения в угловой мере в следующих размерах:
- допуск на погрешности наведения ПСТ, ШСТ и ШСУ в интервале углов места от нижней границы зоны наведения до 9° при неизменных азимуте и дальности не изменяются;
- при движении над продолжением оси ВПП по прямой линии, проходящей через фазовый центр антенны радиомаяка и опорную точку ухода на второй круг, допуски на погрешности ПСТ и ШСТ увеличиваются пропорционально увеличению дальности от конца ВПП так, что на удалении 9,3 км они превышают в 2 раза их значения в опорной точке, а допуск на погрешность ШСУ увеличивается в 1,3 раза; изменение допусков на погрешности ПСТ, ШСТ и ШСУ на других азимутах при неизменных угле места и азимуте, но при изменении дальности, происходит таким же образом;
- при изменении азимута и при неизменных расстоянии и угле места допуски на погрешности изменяются так, что на азимутах ± 20° допуски на погрешности ПСТ и ШСТ возрастают в 1,5 раза по сравнению с их значением на азимуте 0°, а допуск на погрешность ШСУ возрастает в 1,3 раза;
- при увеличении угла места от 9° до 15° (вершина угла места лежит в фазовом центре радиомаяка) и при неизменных азимуте и дальности допуски на погрешности ПСТ и ШСТ возрастают так, что при угле места 15° они увеличиваются в 1,3 раза по сравнению с их значением при угле места 9°, а допуск на погрешность ШСУ при изменении угла места не изменяется.
Примечание - Вершины углов места и азимутов находятся в фазовом центре антенн радиомаяка наведения по азимуту при уходе на второй круг.
5.1.28 Погрешность наведения ЛА по углу места захода на посадку не должна превышать в опорной точке захода на посадку значений, указанных в таблице 3.
5.1.28.1 К границам зоны наведения разрешается в угловой мере монотонное увеличение допусков на погрешности наведения ЛА по углу места при заходе на посадку:
- при движении по прямой линии, проходящей через точку начала отсчета системы и опорную точку (минимальная глиссада) или при движении по прямой линии, исходящей из точки начала отсчета системы, наклоненной под углом места 3° (в зависимости от того, что меньше), допуски на погрешности ПСТ и ШСТ увеличиваются пропорционально дальности от порога ВПП так, что на удалении 37 км они достигают 0,2°, а допуск на погрешность ШСУ при удалении на 18,5 км в 1,3 раза превышает ее значение в опорной точке;
- при изменении азимута и при неизменных дальности и угле места допуски на погрешности ПСТ, ШСТ и ШСУ изменяются пропорционально азимуту так, что на азимуте ± 40° они в 1,3 раза превышают погрешности на азимуте 0°;
- при изменении угла места от угла минимальной глиссады или от угла места 3° (в зависимости от того, что меньше) и до максимального угла места зоны пропорционального наведения при неизменных азимуте и дальности допуски на погрешности ПСТ, ШСТ и ШСУ увеличиваются пропорционально углу места так, что при угле места 15° они в два раза превышают их значения в соответствующих точках минимальной глиссады или линии, проходящей под углом места 3° (в зависимости от того, что меньше); непосредственно над опорной точкой погрешность ШСУ не должна превышать 0,07°, а при других азимутах и дальностях погрешности ПСТ и ШСТ не должны превышать 0,8°, а ШСУ - 0,4° при изменении этих погрешностей так, как это описано в первом и втором абзацах настоящего пункта;
- при изменении угла места от угла минимальной глиссады или от угла места 3° (в зависимости от того, что меньше) и до 60 % упомянутых углов места допуски на ПСТ, ШСТ и ШСУ не изменяются;
- при изменении угла места от 60 % угла минимальной глиссады или 60 % от угла места 3° (в зависимости от того, что меньше) и до нижней границы зоны действия непосредственно под опорной точкой допуски на погрешности ПСТ, ШСТ и ШСУ растут обратно пропорционально углу места до увеличения в 6 раз по сравнению с их значениями в опорной точке; в других участках зоны действия при углах места от 60 % угла места минимальной глиссады или 3° (в зависимости от того, что меньше) и до нижней границы зоны действия допуски на погрешности ПСТ, ШСТ и ШСУ растут пропорционально удалению от порога ВПП или пропорционально азимуту так, как это описано в первом и втором абзацах настоящего пункта, но при этом ПСТ и ШСТ не должны превышать 0,8°, а ШСУ - 0,4°.
5.1.28.2 Устройство наведения по углу места, предназначенное для работы с минимальной глиссадой более 3°, не должно обеспечивать погрешность наведения, меньшую, чем ее значение для устройства с минимальной глиссадой в 3° в пределах зоны действия.
5.1.29 Погрешность наведения ЛА при выравнивании по углу места в опорной точке не должна превышать значений, указанных в таблице 3.
Примечание - Допускаемое увеличение погрешности наведения ЛА по углу места при выравнивании будет определено после установления ИКАО соответствующих требований.
5.1.30 Минимальные необходимые уровни сигналов наземных устройств для обеспечения наведения ЛА с заданной погрешностью приведены в таблице 4. Требуемое соотношение мощностей между клиренсными сигналами и сигналами сканирующего луча приведено в 5.1.20.3.
Таблица 4
Минус дБ·Вт/м2
|
Сигнал преамбулы |
Угломерный сигнал при ширине сканирующего луча |
Сигнал клиренса |
|||
|
1° |
2° |
3° |
|||
|
Наведение по азимуту захода на посадку |
89,5 |
85,7 |
79,7 |
76,2 |
88,0 |
|
Наведение по азимуту захода на посадку с высокой частотой обновления |
89,5 |
88,0 |
84,5 |
81,0 |
88,0 |
|
Наведение по азимуту при уходе на второй круг |
89,5 |
88,0 |
82,7 |
79,2 |
88,0 |
|
Наведение по углу места при заходе на посадку и выравнивании |
89,5 |
88,0 |
84,5 |
- |
- |
5.1.30.1 Уровни угломерных сигналов наведения по азимуту при заходе на посадку должны превышать значения, приведенные в таблице 4, не менее чем на:
- 15 дБ в опорной точке захода на посадку;
- 5 дБ для сканирующего луча шириной 1º или на 9 дБ для сканирующего луча 2° и шире; указанное превышение должно появляться на высоте 2,5 м над точкой начала отсчета системы МЛС или на высоте 2,5 м над наиболее удаленной (от радиомаяка наведения по азимуту захода на посадку) точкой оси ВП.
5.1.30.2 Для обеспечения ЛА достоверной информацией наведения в случае отказа одного из видов обслуживания должна обеспечиваться взаимозависимость между излучениями видов обслуживания, которая приведена в таблице Б.9.
5.1.32 Погрешность определения дальности ЛА до НРД не должна превышать с доверительной вероятностью Р = 0,95 % значений, приведенных в таблице 5.
Таблица 5
|
Класс точности |
Режим |
Погрешность следования по траектории, м |
Шум управления, м |
|
|
От 37 до 9,3 км от опорной точки захода на посадку |
1; 2 |
НЭП |
± 250, линейно уменьшаясь до ± 85 |
68, линейно уменьшаясь до 34 |
|
От 9,3 км до опорной точки захода на посадку |
1 |
КЭП |
± 85, линейно уменьшаясь до ± 30 |
18 |
|
2 |
КЭП |
± 85, линейно уменьшаясь до ± 12 |
12 |
|
|
Примечание 1 |
- |
НЭП |
± 100 |
68 |
|
В опорной точке захода на посадку и над всей ВПП |
1 |
КЭП |
± 30 |
18 |
|
2 |
КЭП |
± 12 |
12 |
|
|
В пределах зоны наведения по азимуту ухода на второй круг |
1; 2 |
КЭП |
± 100 |
± 68 |
|
Примечание 1 |
- |
НЭП |
± 100 |
± 68 |
|
Примечания 1 Если режим КЭП не используется, то режим НЭП можно применять для системы МЛС с расстояния 9,3 км до опорной точки захода ЛА на посадку и во всей зоне наведения по азимуту ухода на второй круг. 2 Радиодальномерная подсистема определяет дальность от ЛА до фазового центра антенны НРД; расстояние до точки начала отсчета с учетом слова 3 основных данных определяет бортовой вычислитель. |
||||
Разрешается линейное увеличение допуска на погрешности следования ЛА по траектории до 1,5 раза на краю сектора ± 40° относительно средней линии ВПП, расположенного в направлении захода на посадку.
Примечание - Обработка результатов измерений дальности ЛА для определения погрешности наведения выполняется согласно указаниям, приведенным в приложениях Д и Е.
5.1.34 Наземные угломерные устройства, НРД и бортовой запросчик радиодальномера должны обеспечивать электромагнитную совместимость с аппаратурой РСБН и другими системами, использующими общие полосы частот.
5.1.35 Наземное угломерное и дальномерное оборудование системы МЛС обеспечивает посадку ЛА в условиях метеоминимумов различных категорий, если это оборудование обладает параметрами, определяемыми уровнями обслуживания в следующем соответствии:
- в условиях метеоминимума категории I при параметрах 1-го уровня обслуживания;
- в условиях метеоминимума категории II при параметрах 2-го уровня обслуживания;
- в условиях метеоминимума категории III при параметрах 3-го уровня обслуживания;
- в условиях метеоминимумов категорий IIIв и IIIс при параметрах 4-го уровня обслуживания.
Параметры уровней обслуживания приведены в таблице 6.
Таблица 6
|
Радиомаяки наведения по азимуту или углу места*** |
Наземный ретранслятор дальномера*** |
|||||
|
Целостность обслуживания для одиночной посадки*4 |
Непрерывность обслуживания*4 |
Наработка на отказ, ч |
Целостность обслуживания для одиночной посадки*4 |
Непрерывность обслуживания*4 |
Наработка на отказ, ч |
|
|
1 |
Оборудование должно соответствовать требованиям 2-го уровня обслуживания |
|||||
|
2 |
1 - 1·10-7 |
1 - 4·10 - 6 (15 с) |
1000 |
1 - 1·10-7 |
1 - 4·10 - 6 (15 с) |
1000 |
|
3 |
1 - 0,5·10-9 |
1 - 2·10 - 6 (15 с) |
2000 |
1 - 1·10-7 |
1 - 4·10 - 6 (15 с) |
1000 |
|
4 |
1 - 0,5·10-9 |
1 - 2·10 - 6 (30 с, АРМ) (15 с, УРМ) |
4000 (АРМ) 2000 (УРМ) |
1 - 1·10-7 |
1 - 4·10 - 6 (15 с) |
1000 |
|
* Значения целостности и непрерывности обслуживания передачи слов данных для АРМ и УРМ включены в указанные значения для каждого уровня обслуживания соответственно. ** В основных схемах захода на посадку РУВК не применяется. *** Если для работы в составе системы МЛС используется НРД/Н, то значения целостности и непрерывности обслуживания могут быть уменьшены до 1 - 1·10-5. *4 Определения терминов «целостность» и «непрерывность обслуживания» приведены в [1]. Примечание - Все оборудование, установленное после 01.01.2001, должно иметь параметры не хуже определенных для 2-го уровня обслуживания. |
||||||
5.2 Основные параметры наземных устройств наведения ЛА по азимуту (азимутальные радиомаяки)
5.2.1 Излучение наземного устройства в периоды времени, когда данное устройство не должно излучать (остаточное излучение), должно быть не менее чем на 70 дБ ниже уровня при передаче и настолько мало, чтобы не мешало приему и правильной обработке сигналов других устройств.
5.2.3 Наведение по азимуту должно осуществляться в планарной или конической системе координат.
5.2.3.1 Зона наведения наземных устройств по азимуту должна представлять собой пространство, в пределах и на границах которого сигналы должны быть не меньше уровней, указанных в таблице 4.
5.2.3.2 Зона наведения разделяется на зону ВПП, сектор пропорционального наведения и сектор наведения по клиренсному сигналу.
Зона наведения по азимуту захода на посадку приведена на рисунках Ж.1 и Ж.2 приложения Ж.
Зона наведения по азимуту ухода на второй круг приведена на рисунке Ж.3.
5.2.4 Зона наведения по азимуту захода на посадку (рисунки Ж.1 и Ж.2) должна охватывать пространство, ограниченное следующими поверхностями:
а) в горизонтальной плоскости - в секторе 80° (как правило, ± 40° относительно линии визирования антенны), который начинается от фазового центра антенны азимута захода на посадку;
б) в продольном направлении - от антенны азимута захода на посадку до точки, удаленной на 41,7 км;
в) в вертикальной плоскости между:
- нижней конической поверхностью, начинающейся от фазового центра антенны азимута захода на посадку и простирающейся вверх до границы зоны действия в продольном направлении (600 м над горизонтальной плоскостью, проходящей через фазовый центр антенны) и
- верхней конической поверхностью, начинающейся от фазового центра антенны азимута захода на посадку, имеющей угол наклона 15° относительно горизонтали и простирающейся вверх до высоты 6000 м.
Примечания
1 Если по условиям размещения наземной аппаратуры препятствия выступают за коническую поверхность, то наведение не должно обеспечиваться ниже линии прямой видимости вершин препятствий из фазового центра антенны устройства наведения по азимуту.
2 Если предполагается, что за пределами рекомендуемого сектора зоны действия имеется неверная инструктивная информация, а в соответствующих правилах эксплуатации не предусмотрено приемлемое решение, используются методы сведения этих эффектов к минимуму. Эти методы включают коррекцию сектора пропорционального наведения или использование сигналов внезонной индикации.
3 Если сектор пропорционального наведения меньше минимальной зоны действия в горизонтальной плоскости, указанной в 5.2.4, перечисление а, то требуются сигналы наведения по клиренсу.
5.2.4.1 Зона ВПП (рисунки Ж.1 и Ж.2) должна охватывать пространство, ограниченное следующими поверхностями:
а) в горизонтальной плоскости - на расстоянии 45 м с каждой стороны от осевой линии ВПП, начинающемся от дальнего конца ВПП и простирающемся параллельно осевой линии ВПП в направлении захода на посадку до соединения с районом минимальной эксплуатационной зоны действия;
б) в вертикальной плоскости между:
- горизонтальной поверхностью, расположенной на высоте 2,5 м над наиболее удаленной точкой оси ВПП, которая находится на линии прямой видимости азимутальной антенны и
- конической поверхностью, начинающейся от антенны наземного азимутального оборудования, имеющей угол наклона 20° относительно горизонтали и простирающейся вверх до высоты 600 м.
Примечание - Для выпуклых ВПП нижней границей зоны наведения является горизонтальная плоскость, проходящая на высоте 2,5 м над наиболее удаленной точкой касания к оси ВПП прямой линии, проведенной из фазового центра антенны АРМ в сторону порога ВПП.
Для вогнутых ВПП нижней границей зоны наведения является горизонтальная плоскость, проходящая на высоте 2,5 м над наиболее удаленной точкой оси ВПП, которая находится на линии прямой видимости из фазового центра антенны АРМ.
5.2.4.4 Сектор пропорционального наведения должен быть не меньше ± 10° относительно оси ВПП.
5.2.5 Зона наведения по азимуту ухода на второй круг должна охватывать сигналами наведения пространство (см. рисунок Ж.3), не менее ограниченного следующими поверхностями:
а) в горизонтальной плоскости - в секторе ± 20° относительно осевой линии ВПП, начинающемся от антенны наземного оборудования наведения по азимуту ухода на второй круг и простирающемся в направлении ухода на второй круг, по крайней мере, на 18,5 км от дальнего конца ВПП;
б) в вертикальной плоскости в зоне ВПП между:
- горизонтальной поверхностью, расположенной на высоте 2,5 м над наиболее удаленной точкой по оси ВПП, которая находится на линии прямой видимости антенны наведения по азимуту ухода на второй круг и
- конической поверхностью, начинающейся от антенны наземного оборудования наведения по азимуту ухода на второй круг, имеющей угол наклона 20° относительно горизонтали и простирающейся вверх до высоты 600 м;
в) в вертикальной плоскости в зоне наведения по азимуту ухода на второй круг между:
- конической поверхностью, начинающейся на высоте 2,5 м над дальним концом ВПП и имеющей угол наклона 0,9° относительно горизонтали и
- конической поверхностью, начинающейся от антенны наземного оборудования наведения по азимуту ухода на второй круг, имеющей угол наклона 15° относительно горизонтали и простирающейся вверх до высоты 3000 м.
Примечание - Если физические характеристики ВПП или препятствий не соответствуют требованиям 5.2.5, перечисления б, в, обеспечивать наведение ниже линии прямой видимости необходимости нет.
5.2.5.1 Оборудование наведения по азимуту ухода на второй круг должно обеспечивать информацию наведения в секторе до 30° относительно горизонтали.
- погрешность ПСТ в опорной точке превышает нормы, указанные в 5.1.26, 5.1.26.1, 5.1.27;
- мощность излучения становится меньше, чем указано в 5.1.30;
- в сигналах ДФМС преамбулы возникает более одной ошибки за любую 1 с;
- нарушается взаимное расположение во времени сигналов наземного оборудования, оговоренное в 5.1.7 и 5.1.8.
5.2.6.1 Конструкция и схема устройства контроля должны быть такими, чтобы при отказе устройства контроля излучение сигналов наведения прекращалось и в соответствующие пункты управления подавался сигнал аварии.
5.2.6.2 Время, в течение которого излучаются ошибочные сигналы, и время отсутствия сигналов наведения в совокупности не должно превышать 1 с. В течение этого времени должны предприниматься все возможные меры по восстановлению работы оборудования. Если это не удается до истечения секунды, то оборудование должно отключаться и восстановление излучения разрешается не ранее чем через 20 с.
5.2.7 Погрешность наземного оборудования наведения по азимуту, вносимая в погрешность положения средней линии пути системы, которая является частью погрешности ПСТ, не должна в отсутствие переотражений превышать ± 3 м в опорной точке захода на посадку или в опорной точке ухода на второй круг.
5.2.7.1 Погрешность наземного оборудования, вносимая в погрешность ШСУ системы, не должна в условиях отсутствия переотражений и при доверительной вероятности Р = 0,95 % превышать в опорной точке захода на посадку или в опорной точке ухода на второй круг ± 1 м или ± 0,03° в зависимости от того, что меньше.
5.2.8 Антенну наземного устройства наведения по азимуту захода на посадку устанавливают так, чтобы вертикальная плоскость, совпадающая с направлением 0°, проходила через опорную точку захода на посадку, а сама антенна находилась за концом ВПП на продолжении ее оси.
5.2.8.1 Антенну наземного устройства наведения по азимуту ухода на второй круг устанавливают так, чтобы вертикальная плоскость, совпадающая с направлением 0°, проходила через опорную точку ухода на второй круг, а сама антенна находилась за порогом ВПП на продолжении ее оси.
5.2.8.2 Допускается устанавливать антенну наземного устройства наведения по азимуту смещенной относительно оси ВПП, если установка на продолжении оси ВПП невозможна. При этом смещенная антенна наведения по азимуту должна быть установлена так, чтобы азимут 0° проходил либо параллельно оси ВПП, либо через соответствующую опорную точку.
5.2.9 В составе наземных устройств наведения ЛА по азимуту должно быть предусмотрено оборудование передачи основных и вспомогательных данных. Размещение во времени и перечень элементов сигнала этого оборудования приведены в таблицах Б.7 и Б.8.
5.2.9.1 Основные и вспомогательные данные должны передаваться сигналами с ДФМС, параметры которой приведены в 5.1.12 и 5.1.13.
5.2.9.2 Содержание и максимальный интервал между словами основных данных приведены в таблице Б.10. Данные, содержащие цифровую информацию, должны передаваться, начиная с самого младшего бита, а наименьшее двоичное число должно означать нижний предел диапазона с приращениями по двоичным ступеням до верхнего предела диапазона.
5.2.9.3 Содержание сообщений основных данных, указанное в таблице Б.1, расшифровывается следующим образом:
- расстояние от фазового центра антенны АРМ представляет собой минимальное расстояние от фазового центра АРМ до плоскости, перпендикулярной к оси ВПП, проходящей через ее порог;
- граница сектора пропорционального наведения по азимуту захода на посадку представляет собой границу сектора, в котором информация о положении ЛА пропорциональна его азимуту относительно оси ВПП;
- сигнал вида клиренса указывает метод осуществления сигнала клиренсного наведения по азимуту;
- минимальная глиссада - линия, угол наклона которой в плоскости азимута 0° соответствует правилам захода на посадку и критериям нормирования пролета препятствий, приведенным в [1];
- сообщение о состоянии РУВК;
- сообщение об эксплуатационном состоянии НРД;
- сообщение об эксплуатационном состоянии АРМ;
- сообщение об эксплуатационном состоянии УРМ;
- ширина луча АРМ и УРМ представляет собой ширину луча антенны, определенную по ГОСТ 26566 до ближайшего самого младшего бита, предусмотренного в слове данных;
- расстояние от НРД до точки начала отсчета МЛС представляет собой минимальное расстояние, измеренное между фазовым центром антенны НРД и плоскостью, перпендикулярной к оси ВПП, которая проходит через точку начала отсчета МЛС;
- ориентация АРМ относительно магнитного меридиана представляет собой угол, измеренный в горизонтальной плоскости по часовой стрелке от северного направления магнитного меридиана до нулевого направления АРМ, исходящего из фазового центра антенны радиомаяка. Вершина измеренного угла лежит в фазовом центре антенны АРМ;
- ориентация РУВК относительно магнитного меридиана представляет собой угол, измеренный в горизонтальной плоскости по часовой стрелке от северного направления магнитного меридиана до нулевого направления РУВК, исходящего из фазового центра антенны РУВК. Вершина измеренного угла лежит в фазовом центре антенны радиомаяка;
- граница сектора наведения ЛА радиомаяком РУВК представляет собой границу зоны, где осуществляется наведение ЛА по его сигналам;
- опознавание наземной установки представляет собой последние три буквы кода опознавания согласно 5.1.19.1, присвоенного данной установке. Буквы передаются в соответствии с международным телеграфным кодом Морзе. Кроме того, знаки опознавания передаются в слове 6 основных данных в соответствии с международным телеграфным алфавитом № 5 (1А-5, таблицы 4-4 Приложения 10 ИКАО [1]) с использованием битов b1 до b6.
Примечание - Бит b7 этого алфавита может быть восстановлен бортовым приемником путем добавления бита b6.
5.2.11 Формирование сигналов вспомогательных данных должно осуществляться 89-тактовыми словами, состоящими из преамбулы (25 тактов), адреса (8 тактов), информационных тактов (52 такта) и тактов четности (4 такта). Размещение во времени элементов сигналов вспомогательных данных приведено в таблице Б.8. Предусматриваются три кода опознавания вида обслуживания для опознавания вспомогательных данных видов А, В и С (таблица Б.11). Должна быть предусмотрена возможность передачи цифровых и буквенно-цифровых данных. Данные, содержащие цифровую информацию, должны передаваться, начиная с самого младшего бита. Буквенно-цифровые данные должны передаваться в соответствии с международным телеграфным алфавитом № 5 (1А-5 часть 1 [1]) с использованием семи информационных битов; к каждому знаку должен добавляться один бит положительной четности. Буквенно-цифровые данные должны передаваться в той последовательности, в которой они должны считываться. Последовательная передача знака должна начинаться с передачи бита младшего разряда и заканчиваться передачей бита четности. В тех случаях, когда предусмотрена передача вспомогательных данных, они должны передаваться между последовательностями излучений устройств в любом свободном месте.
Примечание - Содержание вспомогательных данных А приведено в 5.2.13. Содержание вспомогательных данных В резервируется для будущего использования, а содержание вспомогательных данных С резервируется для национального использования.
5.2.12 Система контроля обеспечивает подачу предупреждающего сигнала в установленный пункт управления, если излучаемая мощность сигнала меньше, чем необходимо для соблюдения требований в отношении ДФМС, указанных в таблице 4.
Если обнаруженная ошибка в основных данных, излучаемых в зону действия азимута захода на посадку, встречается, по меньшей мере, в двух последовательных выборках, излучение этих данных, функции азимута захода на посадку и угловой функции прекращаются.
Если обнаруженная ошибка в основных данных, излучаемых в зону действия наведения по азимуту ухода на второй круг, встречается, по меньшей мере, в двух последовательных выборках, излучение этих данных и функции наведения по азимуту ухода на второй круг прекращаются.
5.2.13 Содержание вспомогательных данных А, приведенных в таблице Б.12, определяется следующим образом:
- смещение антенны АРМ представляет собой минимальное расстояние между фазовым центром антенны АРМ и вертикальной плоскостью, проходящей через осевую линию ВПП;
- расстояние от антенны АРМ до точки начала отсчета системы МЛС представляет собой минимальное расстояние между фазовым центром антенны АРМ и содержащей точку начала отсчета системы МЛС вертикальной плоскостью, перпендикулярной к оси ВПП;
- согласование АРМ с осью ВПП представляет собой минимальный угол между азимутом АРМ, равным 0°, и осью ВПП;
- система координат АРМ представляет собой планарную или коническую систему координат, используемую АРМ для передачи азимутальных углов;
- высота антенны азимута захода на посадку представляет собой высоту фазового центра антенны относительно точки начала отсчета системы МЛС;
- смещение антенны УРМ представляет собой минимальное расстояние между фазовым центром антенны УРМ и вертикальной плоскостью, проходящей через ось ВПП;
- расстояние от точки начала отсчета системы МЛС до порога ВПП представляет собой расстояние, измеренное вдоль оси ВПП, от точки начала отсчета системы МЛС до порога ВПП;
- высота антенны УРМ представляет собой высоту фазового центра антенны УРМ относительно точки начала отсчета системы МЛС;
- превышение точки начала отсчета системы МЛС представляет собой превышение точки начала отсчета относительно среднего уровня моря;
- высота порога ВПП представляет собой высоту точки пересечения порога и осевой линии ВПП относительно точки начала отсчета системы МЛС;
- смещение НРД представляет собой минимальное расстояние между фазовым центром антенны НРД и вертикальной плоскостью, проходящей через ось ВПП;
- расстояние от НРД до точки начала отсчета системы МЛС представляет собой минимальное расстояние между фазовым центром антенны НРД и вертикальной плоскостью, содержащей точку начала отсчета системы МЛС, которая перпендикулярна к оси ВПП;
- высота антенны НРД представляет собой высоту фазового центра антенны относительно точки начала отсчета системы МЛС;
- расстояние до дальнего конца ВПП представляет собой расстояние вдоль осевой линии между дальним концом ВПП и точкой начала отсчета системы МЛС;
- смещение антенны РУВК представляет собой минимальное расстояние между фазовым центром антенны РУВК и вертикальной плоскостью, проходящей через ось ВПП;
- расстояние от РУВК до точки начала отсчета системы МЛС представляет собой минимальное расстояние между фазовым центром РУВК и вертикальной плоскостью, содержащей точку начала отсчета системы МЛС, которая перпендикулярна к оси ВПП;
- согласование РУВК с осью ВПП представляет собой минимальный угол между направлением РУВК, равным 0°, и осью ВПП;
- система координат антенны наведения по азимуту ухода на второй круг представляет собой систему координат (планарную или коническую) угловых данных, передаваемых антенной наведения по азимуту ухода на второй круг;
- высота антенны наведения по азимуту ухода на второй круг представляет собой высоту фазового центра антенны относительно точки начала отсчета системы МЛС.
5.3 Основные параметры наземных устройств наведения ЛА по углу места УРМ
5.3.1.1 Зона наведения наземного устройства для наведения по углу места при заходе на посадку представляет собой пространство (рисунки Ж.4 и Ж.5), в пределах и на границах которого сигналы оборудования не должны быть меньше указанных в таблице 4.
5.3.2 Зона УРМ должна охватывать пространство не менее ограниченного следующими поверхностями (рисунки Ж.4 и Ж.5):
а) в горизонтальной плоскости - в секторе, начинающемся от фазового центра угломестной антенны, угол которого не менее угла сектора пропорционального наведения, обеспечиваемого наземным оборудованием азимута захода на посадку на границе зоны действия в продольном направлении;
б) в продольном направлении - от угломестной антенны в направлении захода на посадку на 37 км от порога ВПП;
в) в вертикальной плоскости - между:
1) нижней конической поверхностью, начинающейся от фазового центра угломестной антенны и простирающейся вверх до границы зоны действия в продольном направлении (600 м над горизонтальной плоскостью, проходящей через фазовый центр антенны) и
2) верхней конической поверхностью, начинающейся от фазового центра антенны УРМ и имеющей угол наклона 7,5° относительно горизонтали и простирающейся вверх до высоты 600 м.
Примечание - Если физические характеристики зоны захода на посадку не соответствуют требованиям 5.3.2, перечисления а, б, в1), то обеспечивать наведение ниже линии прямой видимости необходимости нет.
В тех случаях, когда это обусловлено эксплуатационными требованиями, наземное оборудование захода на посадку по углу места должно обеспечивать пропорциональное наведение до углов, превышающих 7,5° относительно горизонтали.
5.3.2.1 Зона действия УРМ при выравнивании (зона пропорционального наведения) должна охватывать сигналами, уровень которых в пределах и на границах зоны указан в таблице 4, пространство, ограниченное следующими поверхностями (рисунок Ж.6):
а) в горизонтальной плоскости - в пределах сектора ± 10° относительно продолжения осевой линии ВПП, начинающегося в точке начала отсчета системы МЛС;
б) в продольном направлении - на расстоянии 75 м от точки начала отсчета системы МЛС в направлении порога ВПП до дальней границы зоны действия, указанной в 5.3.2, перечисление б;
в) в вертикальной плоскости - между верхней поверхностью, указанной в 5.3.2, перечисление в2), и наивысшей из следующих поверхностей:
1) поверхностью на высоте 2,5 м над ВПП, являющейся геометрическим местом точек;
2) поверхностью, начинающейся в точке начала отсчета системы МЛС и простирающейся вверх до границы зоны действия в продольном направлении, не превышающей высоту поверхности, указанной в 5.3.2, перечисление в1).
- погрешность следования по траектории превышает указанную в 5.1.28 и 5.1.29 за счет увеличения погрешности положения усредненной глиссады, вызванной наземным оборудованием;
- уровни сигналов меньше указанных в 5.1.30;
- имеется более одной ошибки в сигналах основных данных и преамбулы;
- нарушаются требования 5.1.10 в отношении точности размещения во времени элементов сигнала наведения по углу места при выравнивании и заходе на посадку;
- нарушаются требования 5.1.7 и 5.1.8 в отношении передачи на одной частоте без взаимных помех сигналов различного оборудования системы посадки.
5.3.3.1 Конструкция и схема устройства контроля должны предусматривать прекращение излучения сигналов наведения и подачу сигнала аварии в соответствующие пункты управления в случае отказа системы контроля.
5.3.3.2 Суммарное время, в течение которого излучается ошибочная информация в каналах наведения по углу места, и время отсутствия сигналов наведения не должно превышать 1 с. В течение этого времени должны быть приняты все возможные меры по восстановлению исправной работы оборудования. Если это не удается до истечения 1 с, то оборудование наведения должно отключаться и излучение должно возобновляться не ранее чем через 20 с.
5.3.4 Погрешность наземного устройства наведения по углу места при заходе на посадку или выравнивании, вносимая в погрешность положения усредненной глиссады системы (составляющая ПСТ), не должна превышать ± 0,3 м в опорной точке захода на посадку.
Погрешность наземного устройства наведения по углу места при заходе на посадку или выравнивании, вносимая в погрешность ШСУ в отсутствие переотражений, не должна превышать ± 0,15 м в опорной точке захода на посадку при доверительной вероятности Р = 95 %.
5.3.5 Антенна наведения по углу места при заходе на посадку должна устанавливаться так, чтобы минимальная глиссада проходила через опорную точку захода на посадку.
5.3.5.1 Угол наклона минимальной глиссады не должен быть более 3°, за исключением тех случаев, когда это не обеспечивает безопасного пролета препятствий.
5.3.5.2 Если одну и ту же ВПП обслуживают системы МЛС и ИЛС, то глиссада ИЛС и минимальная глиссада МЛС не должны в опорной точке различаться более чем на 1 м.
5.3.5.3 Антенна наведения по углу места для выравнивания должна быть установлена на расстоянии около 1000 м от порога ВПП в сторону ее конца.
5.4 Основные параметры наземного ретранслятора дальномера
5.4.1 Нестабильность частоты передатчика должна быть не более ± 0,002 %.
5.4.2 Параметры ответного импульса НРД должны соответствовать следующим значениям:
а) время нарастания импульса, измеренное в пределах от 0,1 до 0,9 амплитуды, не должно превышать 3 мкс;
б) частичное время нарастания импульса, т.е. нарастание, измеренное в пределах от 0,05 до 0,30 амплитуды, должно быть (0,25 ± 0,05) мкс.
Для режима КЭП и класса точности 1 крутизна импульса в пределах частичного времени нарастания должна изменяться не более чем на ± 20 %. Для класса точности 2 крутизна импульса в пределах частичного времени нарастания должна изменяться не более чем на ± 10 %;
в) длительность импульса, измеренная на уровне 0,5 амплитуды, должна лежать в пределах (3,5 ± 0,5) мкс;
г) время среза импульса, измеренное в пределах от 0,90 до 0,10 амплитуды, должно быть не более 3,5 мкс;
д) в пределах длительности импульса, измеренной на уровне 0,95 амплитуды, его мгновенное значение должно быть не менее 0,95 амплитуды;
ж) спектр импульсно-модулированного сигнала НРД должен быть таким, чтобы в полосе частот 0,5 МГц с центральной частотой, смещенной на 0,8 МГц выше и ниже номинальной частоты излучения (в обоих случаях), эффективная излучаемая мощность в пределах длительности импульса не превышала 200 мВт, а мощность сигнала НРД в полосе частот 0,5 МГц с центральной частотой, смещенной на 2 МГц выше и ниже номинальной частоты излучения, в обоих случаях не превышала 2 мВт. Любой лепесток спектра, находящийся ближе, чем соседний к номинальной частоте излучения, должен иметь большую амплитуду излучения.
Примечания
1 Пределы длительности импульса по 5.4.2, перечисление д, представляют собой время от начала импульса до его окончания. Начало и окончание импульса измеряют на уровне 5 % его амплитуды.
2 Мощность в полосе частот, указанной в 5.4.2, перечисление ж, является средней мощностью за время передачи импульса. Средняя мощность в данной полосе частот представляет собой энергию в данной полосе частот, разделенную на время длительности импульса, указанное в примечании 1.
5.4.3 НРД должен обеспечивать плотность потока мощности у антенны бортового запросчика, не менее:
- минус 89 дБ·Вт/м2 - от точки установки антенны НРД и до конца зоны наведения системы МЛС (расстояние более 13 км);
- минус 75 дБ·Вт/м2 - в зоне наведения системы МЛС на расстоянии менее 13 км от точки установки антенны НРД;
- минус 70 дБ·Вт/м2 - в опорной точке системы МЛС захода на посадку;
- минус 79 дБ·Вт/м2 - на высоте 2,5 м над точкой начала отсчета системы МЛС или над наиболее удаленной точкой оси ВПП, находящейся в пределах прямой видимости от антенны НРД.
5.4.5 НРД должен сохранять работоспособность при увеличении плотностей потоков мощности, указанных в 5.6.3, до минус 22 дБ·Вт/м2.
5.4.7 Место установки определяется длиной и профилем ВПП, а также характером местности, при этом антенна НРД должна располагаться как можно ближе к антенне АРМ.
5.4.8 Задержки по времени сигналов НРД приведены в таблице Б.14.
5.4.9 Контрольная система НРД должна отключать излучение НРД в случае, если в течение более 1 с:
- значение ПСТ, создаваемое НРД, превышает значения, указанные в 5.4.6. Если предел ПСТ в режиме КЭП нарушается, но сохраняется предел в режиме НЭП, то режим НЭП сохраняется;
- эффективная излучаемая мощность НРД оказывается менее необходимой для обеспечения норм, указанных в 5.4.3;
- на 3 дБ или более уменьшается чувствительность приемника, необходимая для удовлетворения норм, оговоренных в 5.4.4 (если это не вызвано работой схемы АРУ приемника);
- интервал между 1-м и 2-м импульсами пары ответа НРД отличается на 1 мкс или более.
5.4.9.1 Ошибочная информация НРД не должна передаваться в течение более 1 с. Если за 1 с не удается восстановить исправную работу НРД, то возобновление исправного излучения разрешается не ранее чем через 20 с.
5.4.9.2 НРД не должен запускаться для целей контроля более 120 раз в секунду.
5.4.9.3 Отказ системы контроля должен автоматически приводить к прекращению излучения НРД и препятствовать возобновлению излучения в течение 20 с.
5.4.10 НРД при необходимости выдает сигнал опознавания одним из следующих способов:
а) независимое опознавание - в случае отдельной работы НРД/П или НРД/Н;
б) взаимодействующее опознавание - в случае совместной работы НРД/Н или НРД/П с навигационным или посадочным оборудованием.
5.4.10.2 Сигнал независимого опознавания имеет следующие характеристики:
а) опознавательный сигнал состоит из передаваемых радиомаячным кодом в виде точек и тире (международный код Морзе) опознавательных импульсов с периодичностью не менее одного раза каждые 40 с со скоростью не менее 6 слов в минуту;
б) характеристики опознавательного кода и скорость передачи букв НРД должны быть такими, чтобы максимальная полная длительность включения не превышала 5 с на группу опознавательного кода. Длительность точек составляет от 0,1 до 0,16 с. Длительность тире в три раза больше длительности точек. Пауза между точками и (или) тире равна длительности одной точки ± 10 %. Пауза между буквами или цифрами составляет не менее длительности трех точек. Весь период передачи группы опознавательного кода не превышает 10 с.
5.4.10.3 Сигнал взаимодействующего опознавания имеет следующие характеристики:
а) при работе НРД совместно с навигационным или угломерным оборудованием системы МЛС сигнал опознавания передается в виде тире и точек, как указано в 5.4.10.1, и синхронизируется с опознавательным кодом навигационного или угломерного оборудования системы МЛС;
б) каждый 40-секундный интервал разделяется на 4 и более равных периода, причем сигнал опознавания НРД передается в течение только одного периода, а опознавательный сигнал навигационного и угломерного оборудования системы МЛС - в течение остальных периодов;
в) для НРД, взаимодействующего с угломерным оборудованием системы МЛС, опознавательный сигнал представляет собой последние три буквы опознавательного кода угломерного оборудования системы МЛС;
г) когда НРД работает совместно с ИЛС и (или) угломерным оборудованием МЛС, он является единым источником синхронизации для всех средств.
5.5 Основные параметры бортового угломерного приемника
5.5.2 Если плотности потоков мощности сигналов преамбулы и сканирующего луча равны значению, указанному в таблице 4, бортовое угломерное устройство должно декодировать угловые сигналы и данные, а погрешность ШСУ в любом декодированном угловом сигнале не должна превышать ± 0,2°.
5.5.3 Для обеспечения допустимой погрешности наведения на высоте 2,5 м над ВПП погрешность ШСУ бортового устройства должна быть меньше 0,04° при плотности потока мощности согласно 5.1.30.1 для высоты 2,5 м.
5.5.4 При значении плотности потока мощности любого излучаемого сигнала в диапазоне от номинального значения, указанного в таблице 4, до максимального значения (минус 14,5 дБ·Вт/м2) бортовой угломерный приемник должен декодировать сигналы, а погрешность определения углов, вызванная бортовым оборудованием, должна соответствовать требованиям 5.5.2.1.
5.5.4.1 Погрешность определения угла, вызванная бортовым угломерным приемником, не должна превышать пределов, указанных в 5.5.2.1, если значения плотности потока мощности отдельных функций различаются в пределах динамического диапазона, указанного в 5.5.4.
5.5.5 Выходные фильтры нижних частот бортового угломерного приемника при входных синусоидальных сигналах не должны вызывать по выходу угловых данных изменения амплитуды и фазы выходного сигнала более чем на 20 % по сравнению с теми же изменениями, которые дает однополюсный фильтр нижних частот с частотой среза 10 рад/с.
5.5.6 Бортовой угломерный приемник должен соответствовать требованиям, изложенным в 5.5.1 - 5.5.4, при воздействии сигнала на частоте смежного канала, который превышает принимаемый сигнал на 25 дБ.
5.6 Основные параметры бортового запросчика радиодальномера
5.6.1 Отклонение частоты передатчика запросчика от номинальной должно быть не более ± 100 кГц.
5.6.2 Параметры запросного импульса передатчика:
- длительность фронта должна быть не более 1,6 мкс;
- время нарастания импульса в пределах от 0,05 до 0,30 его амплитуды должно составлять (0,25 ± 0,05) мкс;
- отклонение закона нарастания импульса от линейного на участке времени нарастания импульса в пределах от 0,05 до 0,30 его амплитуды не должно превышать ± 20 % для класса точности 1 и ± 10 % - для класса точности 2;
- длительность импульса на уровне 0,5 амплитуды должна быть (3,5 ± 0,5) мкс;
- длительность среза импульса не должна превышать 3,5 мкс.
5.6.4 Чувствительность приемника запросчика, бортовая антенна и соединительные кабели вместе при любых погодных условиях, допускаемых для работы системы МЛС, и при плотности потока мощности, создаваемой НРД согласно 5.4.3, должны обеспечивать определение дальности с погрешностью, оговоренной в 5.6.6.
5.6.5 Запросчик должен сохранять работоспособность при возрастании плотности потока мощности от указанной в 5.4.3 до минус 18 дБ·Вт/м2.
5.7 Основные параметры контрольно-проверочной аппаратуры
5.7.1 Имитатор угломерных сигналов должен обеспечивать имитацию сигналов:
- наведения по азимуту захода на посадку;
- наведения по азимуту ухода на второй круг;
- наведения по углу места захода на посадку;
- наведения по углу места при выравнивании;
- слов основных и вспомогательных данных.
5.7.1.1 Рабочий диапазон частот имитатора должен соответствовать частотам, указанным в таблице Б.1.
Число рабочих каналов - 200.
Относительная частотная погрешность сигнала имитатора должна быть не более ± 0,4·10-6. Должна быть предусмотрена возможность изменения частоты на ± 12 кГц относительно номинального значения.
Кратковременная стабильность частоты излучения должна соответствовать указанной в 5.1.4.
5.7.1.2 Уровень выходного сигнала по несущей частоте должен устанавливаться с погрешностью менее ± 1 дБ в точке минус 40 дБ/Вт. Погрешность изменения уровня от минус 40 до минус 140 дБ/Вт не должна превышать ± 2 дБ.
5.7.1.3 Диапазон имитируемых углов сканирования устройств наведения должен быть:
- по азимуту захода на посадку - ± 62° (при частоте обновления сигналов (13,0 ± 0,5) Гц);
- по азимуту ухода на второй круг - ± 42° при частоте обновления сигналов (6,50 ± 0,25) Гц и по азимуту захода на посадку при частоте обновления сигналов (39,0 ± 1,5) Гц;
- по углу места захода на посадку - от минус 1,5° до плюс 29,5° при частоте обновления сигналов (39,0 ± 1,5) Гц;
- по углу места при выравнивании - от минус 2°до плюс 10° при частоте обновления сигналов (39,0 ± 1,5) Гц.
Основная погрешность имитации углов должна быть не более ± 0,004°, дополнительная погрешность - ± 0,002°.
5.7.1.4 Способ кодирования слов данных по высокой частоте - дифференциальная фазовая манипуляция несущей частоты от 0° к 180° и наоборот. Основная погрешность манипуляции должна быть не более ± 6°, дополнительная погрешность - не более ± 4°.
5.7.1.5 Перечисленные в 5.7.1 сигналы должны соответствовать параметрам, приведенным в 5.1.9, 5.1.0 - 5.1.19.3, 5.1.20 - 5.1.22, 5.2.2, 5.2.4.4, 5.2.5, 5.2.9, 5.2.9.1, 5.2.10 и таблицах Б.2 - Б.8, Б.10, Б.11.
5.7.2 ПАЛ должна обеспечивать проверку параметров устройств системы на любом из 200 частотных каналов в диапазоне частот от 5031,0 до 5090,7 МГц.
5.7.2.1 Чувствительность приемника с штатной узконаправленной антенной устройства проверки параметров системы при соотношении сигнал/шум, равном десяти по напряжению, должна быть не более минус 90 дБ·Вт/м2.
5.7.2.2 Основная погрешность измерения углов ПСТ аппаратурой проверки угловых параметров радиомаяков на малых высотах не должна быть более 0,01° при плотности потока мощности от минус 90 до минус 5 дБ·Вт/м2, вероятности 90 % и разнице уровней сигналов азимутальных и угломестных радиомаяков 75 дБ, а также при уровне одного из сигналов согласно 5.1.30.1.
5.7.2.3 В остальном аппаратура проверки параметров системы на малых высотах должна соответствовать нормативной документации на конкретную аппаратуру.
5.7.3 Имитатор сигналов НРД должен создавать на частотах, соответствующих несущим частотам НРД, следующие сигналы:
- ответный сигнал дальности;
- сигнал ХИП;
- сигнал опознавания;
- эхосигнал.
Должна быть предусмотрена возможность отключения каждого из имитируемых сигналов.
5.7.3.1 Имитатор должен создавать сигналы НРД с регулируемой мощностью от минус 125 до минус 40 дБ/Вт. Уровень выходного сигнала должен устанавливаться с погрешностью менее ± 1 дБ в точке минус 40 дБ/Вт. Погрешность установки уровня выходного сигнала при его изменении от минус 40 до минус 125 дБ/Вт не должна превышать ± 3 дБ.
5.7.3.2 Имитатор должен измерять выходную импульсную мощность запросчика в диапазоне от 100 до 3000 Вт или обеспечивать возможность измерения этой мощности при подключении к имитатору внешнего прибора, при этом тракт подключения имитатора не должен вносить погрешность измерения мощности, превышающую ± 1 дБ.
5.7.3.3 Имитатор должен обеспечивать имитацию эхосигналов с фиксированной фазой по отношению к ответному сигналу дальности.
5.7.3.4 Должна обеспечиваться имитация задания дальности от 0 до 500 км. Дискретность задания дальности в интервале от 0 до 5 км должна составлять не более 10 м, а в интервале от 5 до 500 км - не более 19 м.
Примечание - Скорость света считают равной 299700 км/с.
5.7.3.5 Погрешность задания дальности на удалении 5 км не должна превышать ± 5,0 м.
5.7.3.6 Управление угломерными и дальномерными имитаторами должно осуществляться как автономно, так и от внешних управляющих устройств по ГОСТ 26.003.
6 Методы измерений
6.1 Общие положения
6.1.1 Тип и класс точности средств измерений общего применения, используемых при испытаниях системы МЛС, определяют по перечням на конкретные типы оборудования системы МЛС, согласованным с заказчиком.
6.1.2 Проверку основных параметров системы МЛС и устройств, указанных в разделе 5, осуществляют путем наземных и летных измерений.
6.1.3 Измерения проводят с использованием средств измерений общего применения, специальных средств измерений (имитатора угломерных сигналов, имитатора сигналов НРД и аппаратуры для проверки ПАЛ, аппаратуры встроенного контроля, входящей в состав наземного и бортового оборудования, самолета-лаборатории для облета системы и средств траекторных измерений).
6.1.4 Отдельные устройства и система МЛС в целом должны соответствовать нормам, указанным в НД на них, и настоящему стандарту.
6.2 Порядок проведения измерений
6.2.1 Основные параметры, указанные в 5.1.1 - 5.1.4, 5.1.7 - 5.1.12, 5.1.14 - 5.1.15, 5.1.17, 5.1.18 - 5.1.20.2, 5.1.20.4, 5.1.21, 5.1.22, 5.1.22.1, 5.1.24, 5.1.26, 5.1.26.1, 5.1.30, 5.1.30.1, 5.1.30.2, 5.1.33 - 5.2.3, 5.2.4.2, 5.2.6 - 5.2.13, 5.3.3 - 5.3.5.4, 5.4.1 - 5.4.10.3, 5.5.2 - 5.5.4, 5.6.1, 5.6.2, 5.6.5 - 5.7.3.6, проверяют наземными измерениями по методикам технических условий и инструкции по эксплуатации на конкретную систему МЛС.
6.2.2 Основные параметры, указанные в 5.1.5, 5.1.6, 5.1.13, 5.1.19.3, 5.1.20, 5.1.20.3, 5.1.22, 5.1.22,1, 5.1.26 - 5.1.30, 5.1.31, 5.1.32, 5.2.3.1 - 5.2.4.1, 5.2.4.3 - 5.2.5.2, 5.3.1 - 5.3.2.1, 5.4.3, 5.6.3, 5.6.4, проверяют летными испытаниями, которые проводят с использованием средств траекторных измерений и самолета-лаборатории с бортовой аппаратурой системы МЛС, к которой подключены дополнительные фильтры для выделения из сигнала составляющих погрешностей ПСТ, ШСТ и ШСУ, указанных в таблице 3. Параметры фильтров приведены в приложении Д.
6.3 Специализированные измерительные устройства
6.3.1 Самолет-лаборатория должен иметь аппаратуру регистрации (записи) выходных сигналов системы, индикаторы для визуального контроля этих сигналов, средства связи с наземными радиомаяками и средства траекторных измерений. Состав и характеристики оборудования самолета-лаборатории должны соответствовать НД на конкретный самолет-лабораторию.
6.3.2 Проверку по 6.2.2 проводят с использованием средств траекторных измерений, которые определяют положение самолета-лаборатории при выполнении полетов в пределах зоны наведения системы с погрешностью, меньшей, чем погрешность системы МЛС, примерно в 3 раза.
6.3.3 Летные измерения проводят по методикам, приведенным в инструкциях по эксплуатации конкретных устройств и летным испытаниям системы МЛС. Рекомендации по обработке данных летных измерений с целью оценки точностных характеристик системы приведены в приложении Е.
ПРИЛОЖЕНИЕ А
(справочное)
Соответствие сокращений на русском языке английским
аналогам
по ИКАО (ICAO)
YOR - ВОР - всенаправленный радиомаяк, работающий в диапазоне сверхвысоких частот;
DPSK - ДФМС - дифференциальная фазовая манипуляция сигналов;
ILS - ИЛС - система инструментальной посадки метрового диапазона волн;
FA - КЭП - конечный этап захода на посадку;
MLS - МЛС - радиомаячная система инструментального захода ЛА на посадку сантиметрового диапазона волн;
IA - НЭП - начальный этап захода на посадку;
PFE - ПСТ - погрешность следования по траектории;
OCI - СИПВЗН - сигналы индикации о пребывании вне зоны наведения;
PFN - ШСТ - шумы следования по траектории;
CMN - ШСУ - шумы системы управления.
ПРИЛОЖЕНИЕ Б
(обязательное)
Таблица Б.1 - Спаривание каналов ДМЕ с угломерными каналами МЛС
|
Параметры ДМЕ |
|||||||||
|
Запрос |
Ответ |
||||||||
|
Номер канала ДМЕ |
Частота ВОР, МГц |
Частота угломерного МЛС, МГц |
Номер канала МЛС |
Частота, МГц |
Импульсные коды, мкс |
Частота, МГц |
Импульсный код, мкс |
||
|
НРД/Н |
Режим НРД/П |
||||||||
|
НЭП |
КЭП |
||||||||
|
1X* |
- |
- |
- |
1025 |
12 |
- |
- |
962 |
12 |
|
1Y** |
- |
- |
- |
1025 |
36 |
- |
- |
1088 |
30 |
|
2Х* |
- |
- |
- |
1026 |
12 |
- |
- |
963 |
12 |
|
2Y** |
- |
- |
- |
1026 |
36 |
- |
- |
1089 |
30 |
|
3Х* |
- |
- |
- |
1027 |
12 |
- |
- |
964 |
12 |
|
3Y** |
- |
- |
- |
1027 |
36 |
- |
- |
1090 |
30 |
|
4Х* |
- |
- |
- |
1028 |
12 |
- |
- |
965 |
12 |
|
4Y** |
- |
- |
- |
1028 |
36 |
- |
- |
1091 |
30 |
|
5Х* |
- |
- |
- |
1029 |
12 |
- |
- |
966 |
12 |
|
5Y** |
- |
- |
- |
1029 |
36 |
- |
- |
1092 |
30 |
|
6Х* |
- |
- |
- |
1030 |
12 |
- |
- |
967 |
12 |
|
6Y** |
- |
- |
- |
1030 |
36 |
- |
- |
1093 |
30 |
|
7Х* |
- |
- |
- |
1031 |
12 |
- |
- |
968 |
12 |
|
7Y** |
- |
- |
- |
1031 |
36 |
- |
- |
1094 |
30 |
|
8Х* |
- |
- |
- |
1032 |
12 |
- |
- |
969 |
12 |
|
8Y** |
- |
- |
- |
1032 |
36 |
- |
- |
1095 |
30 |
|
9Х* |
- |
- |
- |
1033 |
12 |
- |
- |
970 |
12 |
|
9Y** |
- |
- |
- |
1033 |
36 |
- |
- |
1096 |
30 |
|
10Х* |
- |
- |
- |
1034 |
12 |
- |
- |
971 |
12 |
|
10Y** |
- |
- |
- |
1034 |
36 |
- |
- |
1097 |
30 |
|
11Х* |
- |
- |
- |
1035 |
12 |
- |
- |
972 |
12 |
|
11Y** |
- |
- |
- |
1035 |
36 |
- |
- |
1098 |
30 |
|
12Х* |
- |
- |
- |
1036 |
12 |
- |
- |
973 |
12 |
|
12Y** |
- |
- |
- |
1036 |
36 |
- |
- |
1099 |
30 |
|
13Х* |
- |
- |
- |
1037 |
12 |
- |
- |
974 |
12 |
|
13Y** |
- |
- |
- |
1037 |
36 |
- |
- |
1100 |
30 |
|
14Х* |
- |
- |
- |
1038 |
12 |
- |
- |
975 |
12 |
|
14Y** |
- |
- |
- |
1038 |
36 |
- |
- |
1101 |
30 |
|
15Х* |
- |
- |
- |
1039 |
12 |
- |
- |
976 |
12 |
|
15Y** |
- |
- |
- |
1039 |
36 |
- |
- |
1102 |
30 |
|
16Х* |
- |
- |
- |
1040 |
12 |
- |
- |
977 |
12 |
|
16Y** |
- |
- |
- |
1040 |
36 |
- |
- |
1103 |
30 |
|
17Х*** |
108,00 |
- |
- |
1041 |
12 |
- |
- |
978 |
12 |
|
17Y |
108,05 |
5043,0 |
540 |
1041 |
36 |
36 |
42 |
1104 |
30 |
|
17Z |
- |
5043,3 |
541 |
1041 |
- |
21 |
27 |
1104 |
15 |
|
18Х |
108,10 |
5031,0 |
500 |
1042 |
12 |
12 |
18 |
979 |
12 |
|
18W |
- |
5031,3 |
501 |
1042 |
- |
24 |
30 |
979 |
24 |
|
18Y |
108,15 |
5043,6 |
542 |
1042 |
36 |
36 |
42 |
1105 |
30 |
|
18Z |
- |
5043,9 |
543 |
1042 |
- |
21 |
27 |
1105 |
15 |
|
19Х |
108,20 |
- |
- |
1043 |
12 |
- |
- |
980 |
12 |
|
19Y |
108,25 |
5044,2 |
544 |
1043 |
36 |
36 |
42 |
1106 |
30 |
|
19Z |
- |
5044,5 |
545 |
1043 |
- |
21 |
27 |
1106 |
15 |
|
20Х |
108,30 |
5031,6 |
502 |
1044 |
12 |
12 |
18 |
981 |
12 |
|
20W |
- |
5031,9 |
503 |
1044 |
- |
24 |
30 |
981 |
24 |
|
20Y |
108,35 |
5044,8 |
546 |
1044 |
36 |
36 |
42 |
1107 |
30 |
|
20Z |
- |
5045,1 |
547 |
1044 |
- |
21 |
27 |
1107 |
15 |
|
21Х |
108,40 |
- |
- |
1045 |
12 |
- |
- |
981 |
12 |
|
21Y |
108,45 |
5045,4 |
548 |
1045 |
36 |
36 |
42 |
1108 |
30 |
|
21Z |
- |
5045,7 |
549 |
1045 |
- |
21 |
27 |
1108 |
15 |
|
22Х |
108,50 |
5032,2 |
504 |
1046 |
12 |
12 |
18 |
983 |
12 |
|
22W |
- |
5032,5 |
505 |
1046 |
- |
24 |
30 |
983 |
24 |
|
22Y |
108,55 |
5046,0 |
550 |
1046 |
36 |
36 |
42 |
1109 |
30 |
|
22Z |
- |
5046,3 |
551 |
1046 |
- |
21 |
27 |
1109 |
15 |
|
23Х |
108,60 |
- |
- |
1047 |
12 |
- |
- |
984 |
12 |
|
23Y |
108,65 |
5046,6 |
552 |
1047 |
36 |
36 |
42 |
1110 |
30 |
|
23Z |
- |
5046,9 |
553 |
1047 |
- |
21 |
27 |
1110 |
15 |
|
24Х |
108,70 |
5032,8 |
506 |
1048 |
12 |
12 |
18 |
985 |
12 |
|
24W |
- |
5033,1 |
507 |
1048 |
- |
24 |
30 |
985 |
24 |
|
24Y |
108,75 |
5047,2 |
554 |
1048 |
36 |
36 |
42 |
1111 |
30 |
|
24Z |
- |
5047,5 |
555 |
1048 |
- |
21 |
27 |
1111 |
15 |
|
25Х |
108,80 |
- |
- |
1049 |
12 |
- |
- |
986 |
12 |
|
25Y |
108,85 |
5047,8 |
556 |
1049 |
36 |
36 |
42 |
1112 |
30 |
|
25Z |
- |
5048,1 |
557 |
1049 |
- |
21 |
27 |
1112 |
15 |
|
26Х |
108,90 |
5033,4 |
508 |
1050 |
12 |
12 |
18 |
987 |
12 |
|
26W |
- |
5033,7 |
509 |
1050 |
- |
24 |
30 |
987 |
24 |
|
26Y |
108,95 |
5048,4 |
558 |
1050 |
36 |
36 |
42 |
1113 |
30 |
|
26Z |
- |
5048,7 |
559 |
1050 |
- |
21 |
27 |
1113 |
15 |
|
27Х |
109,00 |
- |
- |
1051 |
12 |
- |
- |
988 |
12 |
|
27Y |
109,05 |
5049,0 |
560 |
1051 |
36 |
36 |
42 |
1114 |
30 |
|
27Z |
- |
5049,3 |
561 |
1051 |
- |
21 |
27 |
1114 |
15 |
|
28Х |
109,10 |
5034,0 |
510 |
1052 |
12 |
12 |
18 |
989 |
12 |
|
28W |
- |
5034,3 |
511 |
1052 |
- |
24 |
30 |
989 |
24 |
|
28Y |
109,15 |
5049,6 |
562 |
1052 |
36 |
36 |
42 |
1115 |
30 |
|
28Z |
- |
5049,9 |
563 |
1052 |
- |
21 |
27 |
1115 |
15 |
|
29Х |
109,20 |
- |
- |
1053 |
12 |
- |
- |
990 |
12 |
|
29Y |
109,25 |
5050,2 |
564 |
1053 |
36 |
36 |
42 |
1116 |
36 |
|
29Z |
- |
5050,5 |
565 |
1053 |
- |
21 |
27 |
1116 |
15 |
|
30Х |
109,30 |
5034,6 |
512 |
1054 |
12 |
12 |
18 |
991 |
12 |
|
30W |
- |
5034,9 |
513 |
1054 |
- |
24 |
30 |
991 |
24 |
|
30Y |
109,35 |
5050,8 |
566 |
1054 |
36 |
36 |
42 |
1117 |
30 |
|
30Z |
- |
5051,1 |
567 |
1054 |
- |
21 |
27 |
1117 |
15 |
|
31Х |
109,40 |
- |
- |
1055 |
12 |
- |
- |
992 |
12 |
|
31Y |
109,45 |
5051,4 |
568 |
1055 |
36 |
36 |
42 |
1118 |
30 |
|
31Z |
- |
5051,7 |
569 |
1055 |
- |
21 |
27 |
1118 |
15 |
|
32Х |
109,50 |
5035,2 |
514 |
1056 |
12 |
12 |
18 |
993 |
12 |
|
32W |
- |
5035,5 |
515 |
1056 |
- |
24 |
30 |
993 |
24 |
|
32Y |
109,55 |
5052,0 |
570 |
1056 |
36 |
36 |
42 |
1119 |
30 |
|
32Z |
- |
5052,3 |
571 |
1056 |
- |
21 |
27 |
1119 |
15 |
|
33Х |
109,60 |
- |
- |
1057 |
12 |
- |
- |
994 |
12 |
|
33Y |
109,65 |
5052,6 |
572 |
1057 |
36 |
36 |
42 |
1120 |
30 |
|
33Z |
- |
5052,9 |
573 |
1057 |
- |
21 |
27 |
1120 |
15 |
|
34Х |
109,70 |
5035,8 |
516 |
1058 |
12 |
12 |
18 |
995 |
12 |
|
34W |
- |
5036,1 |
517 |
1058 |
- |
24 |
30 |
995 |
24 |
|
34Y |
109,75 |
5053,2 |
574 |
1058 |
36 |
36 |
42 |
1121 |
30 |
|
34Z |
- |
5053,5 |
575 |
1058 |
- |
21 |
27 |
1121 |
15 |
|
35Х |
109,80 |
- |
- |
1059 |
12 |
- |
- |
996 |
12 |
|
35Y |
109,85 |
5053,8 |
576 |
1059 |
36 |
36 |
42 |
1122 |
30 |
|
35Z |
- |
5054,1 |
577 |
1059 |
- |
21 |
27 |
1122 |
15 |
|
36Х |
109,90 |
5036,4 |
518 |
1060 |
12 |
12 |
18 |
997 |
12 |
|
36W |
- |
5036,7 |
519 |
1060 |
- |
24 |
30 |
997 |
24 |
|
36Y |
109,95 |
5054,4 |
578 |
1060 |
36 |
36 |
42 |
1123 |
30 |
|
36Z |
- |
5054,7 |
579 |
1060 |
- |
21 |
27 |
1123 |
15 |
|
37Х |
110,00 |
- |
- |
1061 |
12 |
- |
- |
998 |
12 |
|
37Y |
110,05 |
5055,0 |
580 |
1061 |
36 |
36 |
42 |
1124 |
30 |
|
37Z |
- |
5055,3 |
581 |
1061 |
- |
21 |
27 |
1124 |
15 |
|
38Х |
110,10 |
5037,0 |
520 |
1062 |
12 |
12 |
18 |
999 |
12 |
|
38W |
- |
5037,3 |
521 |
1062 |
- |
24 |
30 |
999 |
24 |
|
38Y |
110,15 |
5055,6 |
582 |
1062 |
36 |
36 |
42 |
1125 |
30 |
|
38Z |
- |
5055,9 |
583 |
1062 |
- |
21 |
27 |
1125 |
15 |
|
39Х |
110,20 |
- |
- |
1063 |
12 |
- |
- |
1000 |
12 |
|
39Y |
110,25 |
5056,2 |
584 |
1063 |
36 |
36 |
42 |
1126 |
30 |
|
39Z |
- |
5056,5 |
585 |
1063 |
- |
21 |
27 |
1126 |
15 |
|
40Х |
110,30 |
5037,6 |
522 |
1064 |
12 |
12 |
18 |
1001 |
12 |
|
40W |
- |
5037,9 |
523 |
1064 |
- |
24 |
30 |
1001 |
24 |
|
40Y |
110,35 |
5056,8 |
586 |
1064 |
36 |
36 |
42 |
1127 |
30 |
|
40Z |
- |
5057,1 |
587 |
1064 |
- |
21 |
27 |
1127 |
15 |
|
41Х |
110,40 |
- |
- |
1065 |
12 |
- |
- |
1002 |
12 |
|
41Y |
110,45 |
5057,4 |
588 |
1065 |
36 |
36 |
42 |
1128 |
30 |
|
41Z |
- |
5057,7 |
589 |
1065 |
- |
21 |
27 |
1128 |
15 |
|
42Х |
110,50 |
5038,2 |
524 |
1066 |
12 |
12 |
18 |
1003 |
12 |
|
42W |
- |
5038,5 |
525 |
1066 |
- |
24 |
30 |
1003 |
24 |
|
42Y |
110,55 |
5058,0 |
590 |
1066 |
36 |
36 |
42 |
1129 |
30 |
|
42Z |
- |
5058,3 |
591 |
1066 |
- |
21 |
27 |
1129 |
15 |
|
43Х |
110,60 |
- |
- |
1067 |
12 |
- |
- |
1004 |
12 |
|
43Y |
110,65 |
5058,6 |
592 |
1067 |
36 |
36 |
42 |
1130 |
30 |
|
43Z |
- |
5058,9 |
593 |
1067 |
- |
21 |
27 |
1130 |
15 |
|
44Х |
110,70 |
5038,8 |
526 |
1068 |
12 |
12 |
18 |
1005 |
12 |
|
44W |
- |
5039,1 |
527 |
1068 |
- |
24 |
30 |
1005 |
24 |
|
44Y |
110,75 |
5059,2 |
594 |
1068 |
36 |
36 |
42 |
1131 |
30 |
|
44Z |
- |
5059,5 |
595 |
1068 |
- |
21 |
27 |
1131 |
15 |
|
45Х |
110,80 |
- |
- |
1069 |
12 |
- |
- |
1006 |
12 |
|
45Y |
110,85 |
5059,8 |
596 |
1069 |
36 |
36 |
42 |
1132 |
30 |
|
45Z |
- |
5060,1 |
597 |
1069 |
- |
21 |
27 |
1132 |
15 |
|
46Х |
110,90 |
5039,4 |
528 |
1070 |
12 |
12 |
18 |
1007 |
12 |
|
46W |
- |
5039,7 |
529 |
1070 |
- |
24 |
30 |
1007 |
24 |
|
46Y |
110,95 |
5060,4 |
598 |
1070 |
36 |
36 |
42 |
1133 |
30 |
|
46Z |
- |
5060,7 |
599 |
1070 |
- |
21 |
27 |
1133 |
15 |
|
47Х |
111,00 |
- |
- |
1071 |
12 |
- |
- |
1008 |
12 |
|
47Y |
111,05 |
5061,0 |
600 |
1071 |
36 |
36 |
42 |
1134 |
30 |
|
47Z |
- |
5061,3 |
601 |
1071 |
- |
21 |
27 |
1134 |
15 |
|
48Х |
111,10 |
5040,0 |
530 |
1072 |
12 |
12 |
18 |
1009 |
12 |
|
48W |
- |
5040,3 |
531 |
1072 |
- |
24 |
30 |
1009 |
24 |
|
48Y |
111,15 |
5061,6 |
602 |
1072 |
36 |
36 |
42 |
1135 |
30 |
|
48Z |
- |
5061,9 |
603 |
1072 |
- |
21 |
27 |
1136 |
15 |
|
49Х |
111,20 |
- |
- |
1073 |
12 |
- |
- |
1010 |
12 |
|
49Y |
111,25 |
5062,2 |
604 |
1073 |
36 |
36 |
42 |
1136 |
30 |
|
49Z |
- |
5062,5 |
605 |
1073 |
- |
21 |
27 |
1136 |
15 |
|
50Х |
111,30 |
5040,6 |
532 |
1074 |
12 |
12 |
18 |
1011 |
12 |
|
50W |
- |
5040,9 |
533 |
1074 |
- |
24 |
30 |
1011 |
24 |
|
50Y |
111,35 |
5062,8 |
606 |
1074 |
36 |
36 |
42 |
1137 |
30 |
|
50Z |
- |
5063,1 |
607 |
1074 |
- |
21 |
27 |
1137 |
15 |
|
51Х |
111,40 |
- |
- |
1075 |
12 |
- |
- |
1012 |
12 |
|
51Y |
111,45 |
5063,4 |
608 |
1075 |
36 |
36 |
42 |
1138 |
30 |
|
51Z |
- |
5063,7 |
609 |
1075 |
- |
21 |
27 |
1138 |
15 |
|
52Х |
111,50 |
5041,2 |
534 |
1076 |
12 |
12 |
18 |
1013 |
12 |
|
52W |
- |
5041,5 |
535 |
1076 |
- |
24 |
30 |
1013 |
24 |
|
52Y |
111,55 |
5064,0 |
610 |
1076 |
36 |
36 |
42 |
1139 |
30 |
|
52Z |
- |
5064,3 |
611 |
1076 |
- |
21 |
27 |
1139 |
15 |
|
53Х |
111,60 |
- |
- |
1077 |
12 |
- |
- |
1014 |
12 |
|
53Y |
111,65 |
5064,6 |
612 |
1077 |
36 |
36 |
42 |
1140 |
30 |
|
53Z |
- |
5064,9 |
612 |
1077 |
- |
21 |
27 |
1140 |
15 |
|
54Х |
111,70 |
5041,8 |
536 |
1078 |
12 |
12 |
18 |
1015 |
12 |
|
54W |
- |
5042,1 |
537 |
1078 |
- |
24 |
30 |
1015 |
24 |
|
54Y |
111,75 |
5065,2 |
614 |
1078 |
36 |
36 |
42 |
1141 |
30 |
|
54Z |
- |
5065,5 |
615 |
1078 |
- |
21 |
27 |
1141 |
15 |
|
55Х |
111,80 |
- |
- |
1079 |
12 |
- |
- |
1016 |
12 |
|
55Y |
111,85 |
5065,8 |
616 |
1079 |
36 |
36 |
42 |
1142 |
30 |
|
55Z |
- |
5066,1 |
617 |
1079 |
- |
21 |
27 |
1142 |
15 |
|
56Х |
111,90 |
5042,4 |
538 |
1080 |
12 |
12 |
18 |
1017 |
12 |
|
56W |
- |
5042,7 |
539 |
1080 |
- |
24 |
30 |
1017 |
24 |
|
56Y |
111,95 |
5066,4 |
618 |
1080 |
36 |
36 |
42 |
1143 |
30 |
|
56Z |
- |
5066,7 |
619 |
1080 |
- |
21 |
27 |
1143 |
15 |
|
57Х |
112,0 |
- |
- |
1081 |
12 |
- |
- |
1018 |
12 |
|
57Y |
112,05 |
- |
- |
1081 |
36 |
- |
- |
1144 |
30 |
|
58Х |
112,10 |
- |
- |
1082 |
12 |
- |
- |
1019 |
12 |
|
58Y |
112,15 |
- |
- |
1082 |
36 |
- |
- |
1145 |
30 |
|
59Х |
112,20 |
- |
- |
1083 |
12 |
- |
- |
1020 |
12 |
|
59Y |
112,25 |
- |
- |
1083 |
36 |
- |
- |
1146 |
30 |
|
60Х** |
- |
- |
- |
1084 |
12 |
- |
- |
1021 |
12 |
|
60Y** |
- |
- |
- |
1084 |
36 |
- |
- |
1147 |
30 |
|
61X** |
- |
- |
- |
1085 |
12 |
- |
- |
1022 |
12 |
|
61Y** |
- |
- |
- |
1085 |
36 |
- |
- |
1148 |
30 |
|
62Х** |
- |
- |
- |
1086 |
12 |
- |
- |
1023 |
12 |
|
62Y** |
- |
- |
- |
1086 |
36 |
- |
- |
1149 |
30 |
|
63Х** |
- |
- |
- |
1087 |
12 |
- |
- |
1024 |
12 |
|
63Y** |
- |
- |
- |
1087 |
36 |
- |
- |
1150 |
30 |
|
64Х** |
- |
- |
- |
1088 |
12 |
- |
- |
1151 |
12 |
|
64Y** |
- |
- |
- |
1088 |
36 |
- |
- |
1025 |
30 |
|
65Х** |
- |
- |
- |
1089 |
12 |
- |
- |
1152 |
12 |
|
65Y** |
- |
- |
- |
1089 |
36 |
- |
- |
1026 |
30 |
|
66Х** |
- |
- |
- |
1090 |
12 |
- |
- |
1153 |
12 |
|
66Y** |
- |
- |
- |
1090 |
36 |
- |
- |
1027 |
30 |
|
67Х** |
- |
- |
- |
1091 |
12 |
- |
- |
1154 |
12 |
|
67Y** |
- |
- |
- |
1091 |
36 |
- |
- |
1028 |
30 |
|
68Х** |
- |
- |
- |
1092 |
12 |
- |
- |
1155 |
12 |
|
68Y** |
- |
- |
- |
1092 |
36 |
- |
- |
1029 |
30 |
|
69Х** |
- |
- |
- |
1093 |
12 |
- |
- |
1156 |
12 |
|
69Y** |
- |
- |
- |
1093 |
36 |
- |
- |
1030 |
30 |
|
70Х |
112,30 |
- |
- |
1094 |
12 |
- |
- |
1157 |
12 |
|
70Y** |
112,35 |
- |
- |
1094 |
36 |
- |
- |
1031 |
30 |
|
71Х |
112,40 |
- |
- |
1095 |
12 |
- |
- |
1158 |
12 |
|
71Y** |
112,45 |
- |
- |
1095 |
36 |
- |
- |
1032 |
30 |
|
72Х |
112,50 |
- |
- |
1096 |
12 |
- |
- |
1159 |
12 |
|
72Y** |
112,55 |
- |
- |
1096 |
36 |
- |
- |
1033 |
30 |
|
73Х |
112,60 |
- |
- |
1097 |
12 |
- |
- |
1160 |
12 |
|
73Y** |
112,65 |
- |
- |
1097 |
36 |
- |
- |
1034 |
30 |
|
74Х |
112,70 |
- |
- |
1098 |
12 |
- |
- |
1161 |
12 |
|
74Y** |
112,75 |
- |
- |
1098 |
36 |
- |
- |
1035 |
30 |
|
75Х |
112,80 |
- |
- |
1099 |
12 |
- |
- |
1162 |
12 |
|
75Y** |
112,85 |
- |
- |
1099 |
36 |
- |
- |
1036 |
30 |
|
76Х |
112,90 |
- |
- |
1100 |
12 |
- |
- |
1163 |
12 |
|
76Y** |
112,95 |
- |
- |
1100 |
36 |
- |
- |
1037 |
30 |
|
77Х |
113,00 |
- |
- |
1101 |
12 |
- |
- |
1164 |
12 |
|
77Y** |
113,05 |
- |
- |
1101 |
36 |
- |
- |
1038 |
30 |
|
78Х |
113,10 |
- |
- |
1102 |
12 |
- |
- |
1165 |
12 |
|
78Y** |
113,15 |
- |
- |
1102 |
36 |
- |
- |
1039 |
30 |
|
79Х |
113,20 |
- |
- |
1103 |
12 |
- |
- |
1166 |
12 |
|
79Y** |
113,25 |
- |
- |
1103 |
36 |
- |
- |
1040 |
30 |
|
80Х |
113,30 |
- |
- |
1104 |
12 |
- |
- |
1167 |
12 |
|
80Y |
113,35 |
5067,0 |
620 |
1104 |
36 |
36 |
42 |
1041 |
30 |
|
80Z |
- |
5067,3 |
621 |
1104 |
- |
21 |
27 |
1041 |
15 |
|
81Х |
113,40 |
- |
- |
1105 |
12 |
- |
- |
1168 |
12 |
|
81Y |
113,45 |
5067,6 |
622 |
1105 |
36 |
36 |
42 |
1042 |
30 |
|
81Z |
- |
5067,9 |
623 |
1105 |
- |
21 |
27 |
1042 |
15 |
|
82Х |
113,50 |
- |
- |
1106 |
12 |
- |
- |
1169 |
12 |
|
82Y |
113,55 |
5068,2 |
624 |
1106 |
36 |
36 |
42 |
1043 |
30 |
|
82Z |
- |
5068,5 |
625 |
1106 |
- |
21 |
27 |
1043 |
15 |
|
83Х |
113,60 |
- |
- |
1107 |
12 |
- |
- |
1170 |
12 |
|
83Y |
113,65 |
5068,8 |
626 |
1107 |
36 |
36 |
42 |
1044 |
30 |
|
83Z |
- |
5069,1 |
627 |
1107 |
- |
21 |
27 |
1044 |
15 |
|
84Х |
113,70 |
- |
- |
1108 |
12 |
- |
- |
1171 |
12 |
|
84Y |
113,75 |
5069,4 |
628 |
1108 |
36 |
36 |
42 |
1045 |
30 |
|
84Z |
- |
5069,7 |
629 |
1108 |
- |
21 |
27 |
1045 |
15 |
|
85Х |
113,80 |
- |
- |
1109 |
12 |
- |
- |
1172 |
12 |
|
85Y |
113,85 |
5070,0 |
630 |
1109 |
36 |
36 |
42 |
1046 |
30 |
|
85Z |
- |
5070,3 |
631 |
1109 |
- |
21 |
27 |
1046 |
15 |
|
86Х |
113,90 |
- |
- |
1110 |
12 |
- |
- |
1173 |
12 |
|
86Y |
113,95 |
5070,6 |
632 |
1110 |
36 |
36 |
42 |
1047 |
30 |
|
86Z |
- |
5070,9 |
633 |
1110 |
- |
21 |
27 |
1047 |
15 |
|
87Х |
114,0 |
- |
- |
1111 |
12 |
- |
- |
1171 |
12 |
|
87Y |
114,05 |
5071,2 |
634 |
1111 |
36 |
36 |
42 |
1048 |
30 |
|
87Z |
- |
5071,5 |
635 |
1111 |
- |
21 |
27 |
1048 |
15 |
|
88Х |
114,10 |
- |
- |
1112 |
12 |
- |
- |
1175 |
12 |
|
88Y |
114,15 |
5071,8 |
636 |
1112 |
36 |
36 |
42 |
1049 |
30 |
|
88Z |
- |
5072,1 |
637 |
1112 |
- |
21 |
27 |
1049 |
15 |
|
89Х |
114,20 |
- |
- |
1113 |
12 |
- |
- |
1176 |
12 |
|
89Y |
114,25 |
5072,4 |
638 |
1113 |
36 |
36 |
42 |
1050 |
30 |
|
89Z |
- |
5072,7 |
639 |
1113 |
- |
21 |
27 |
1050 |
15 |
|
90Х |
114,30 |
- |
- |
1114 |
12 |
- |
- |
1177 |
12 |
|
90Y |
114,35 |
5073,0 |
640 |
1114 |
36 |
36 |
42 |
1051 |
30 |
|
90Z |
- |
5073,3 |
641 |
1114 |
- |
21 |
27 |
1051 |
15 |
|
91Х |
114,40 |
- |
- |
1115 |
12 |
- |
- |
1178 |
12 |
|
91Y |
114,45 |
5073,6 |
642 |
1115 |
36 |
36 |
42 |
1052 |
30 |
|
91Z |
- |
5073,9 |
643 |
1115 |
- |
21 |
27 |
1052 |
15 |
|
92Х |
114,50 |
- |
- |
1116 |
12 |
- |
- |
1179 |
12 |
|
92Y |
114,55 |
5074,2 |
644 |
1116 |
36 |
36 |
42 |
1053 |
30 |
|
92Z |
- |
5074,5 |
645 |
1116 |
- |
21 |
27 |
1053 |
15 |
|
93Х |
114,60 |
- |
- |
1117 |
12 |
- |
- |
1180 |
12 |
|
93Y |
114,65 |
5074,8 |
646 |
1117 |
36 |
36 |
42 |
1054 |
30 |
|
93Z |
- |
5075,1 |
647 |
1117 |
- |
21 |
27 |
1054 |
15 |
|
94Х |
114,70 |
- |
- |
1118 |
12 |
- |
- |
1181 |
12 |
|
94Y |
114,75 |
5075,4 |
648 |
1118 |
36 |
36 |
42 |
1055 |
30 |
|
94Z |
- |
5075,7 |
649 |
1118 |
- |
21 |
27 |
1055 |
15 |
|
95Х |
114,80 |
- |
- |
1119 |
12 |
- |
- |
1182 |
12 |
|
95Y |
114,85 |
5076,0 |
650 |
1119 |
36 |
36 |
42 |
1056 |
30 |
|
95Z |
- |
5076,3 |
651 |
1119 |
- |
21 |
27 |
1056 |
15 |
|
96Х |
114,90 |
- |
- |
1120 |
12 |
- |
- |
1183 |
12 |
|
96Y |
114,95 |
5076,6 |
652 |
1120 |
36 |
36 |
42 |
1057 |
30 |
|
96Z |
- |
5076,9 |
653 |
1120 |
- |
21 |
27 |
1057 |
15 |
|
97Х |
115,0 |
- |
- |
1121 |
12 |
- |
- |
1184 |
12 |
|
97Y |
115,15 |
5077,2 |
654 |
1121 |
36 |
36 |
42 |
1058 |
30 |
|
97Z |
- |
5077,5 |
655 |
1121 |
- |
21 |
27 |
1058 |
15 |
|
98Х |
115,10 |
- |
- |
1122 |
12 |
- |
- |
1185 |
12 |
|
98Y |
115,15 |
5077,8 |
656 |
1122 |
36 |
36 |
42 |
1059 |
30 |
|
98Z |
- |
5078,1 |
657 |
1122 |
- |
21 |
27 |
1059 |
15 |
|
99Х |
115,20 |
- |
- |
1123 |
12 |
- |
- |
1186 |
12 |
|
99Y |
115,25 |
5078,4 |
658 |
1123 |
36 |
36 |
42 |
1060 |
30 |
|
99Z |
- |
5078,7 |
659 |
1123 |
- |
21 |
27 |
1060 |
15 |
|
100Х |
115,30 |
- |
- |
1124 |
12 |
- |
- |
1187 |
12 |
|
100Y |
115,35 |
5079,0 |
660 |
1124 |
36 |
36 |
42 |
1061 |
30 |
|
100Z |
- |
5079,3 |
661 |
1124 |
- |
21 |
27 |
1061 |
15 |
|
101Х |
115,40 |
- |
- |
1125 |
12 |
- |
- |
1188 |
12 |
|
101Y |
115,45 |
5079,6 |
662 |
1125 |
36 |
36 |
42 |
1062 |
30 |
|
101Z |
- |
5079,9 |
663 |
1125 |
- |
21 |
27 |
1062 |
15 |
|
102Х |
115,50 |
- |
- |
1126 |
12 |
- |
- |
1189 |
12 |
|
102Y |
115,55 |
5080,2 |
664 |
1126 |
36 |
36 |
42 |
1063 |
30 |
|
102Z |
- |
5080,5 |
665 |
1126 |
- |
21 |
27 |
1063 |
15 |
|
103Х |
115,60 |
- |
- |
1127 |
12 |
- |
- |
1190 |
12 |
|
103Y |
115,65 |
5080,8 |
666 |
1127 |
36 |
36 |
42 |
1064 |
30 |
|
103Z |
- |
5081,1 |
667 |
1127 |
- |
21 |
27 |
1064 |
15 |
|
104Х |
115,70 |
- |
- |
1128 |
12 |
- |
- |
1191 |
12 |
|
104Y |
115,75 |
5081,4 |
668 |
1128 |
36 |
36 |
42 |
1065 |
30 |
|
104Z |
- |
5081,7 |
669 |
1128 |
- |
21 |
27 |
1065 |
15 |
|
105Х |
115,80 |
- |
- |
1129 |
12 |
- |
- |
1192 |
12 |
|
105Y |
115,85 |
5082,0 |
670 |
1129 |
36 |
36 |
42 |
1066 |
30 |
|
105Z |
- |
5082,3 |
671 |
1129 |
- |
21 |
27 |
1066 |
15 |
|
106Х |
115,90 |
- |
- |
1130 |
12 |
- |
- |
1193 |
12 |
|
106Y |
115,95 |
5082,6 |
672 |
1130 |
36 |
36 |
42 |
1067 |
30 |
|
106Z |
- |
5082,9 |
673 |
1130 |
- |
21 |
27 |
1067 |
15 |
|
107Х |
116,00 |
- |
- |
1131 |
12 |
- |
- |
1194 |
12 |
|
107Y |
116,05 |
5083,2 |
674 |
1131 |
36 |
36 |
42 |
1068 |
30 |
|
107Z |
- |
5083,5 |
675 |
1131 |
- |
21 |
27 |
1068 |
15 |
|
108Х |
116,10 |
- |
- |
1132 |
12 |
- |
- |
1195 |
12 |
|
108Y |
116,15 |
5083,8 |
676 |
1132 |
36 |
36 |
42 |
1069 |
30 |
|
108Z |
- |
5084,1 |
677 |
1132 |
- |
21 |
27 |
1069 |
15 |
|
109Х |
116,20 |
- |
- |
1133 |
12 |
- |
- |
1196 |
12 |
|
109Y |
116,25 |
5084,4 |
678 |
1133 |
36 |
36 |
42 |
1070 |
30 |
|
109Z |
- |
5084,7 |
679 |
1133 |
- |
21 |
27 |
1070 |
15 |
|
110Х |
116,30 |
- |
- |
1134 |
12 |
- |
- |
1197 |
12 |
|
110Y |
116,35 |
5085,0 |
680 |
1134 |
36 |
36 |
42 |
1071 |
30 |
|
110Z |
- |
5085,3 |
681 |
1134 |
- |
21 |
27 |
1071 |
15 |
|
111Х |
116,40 |
- |
- |
1135 |
12 |
- |
- |
1198 |
12 |
|
111Y |
116,45 |
5085,6 |
682 |
1135 |
36 |
36 |
42 |
1072 |
30 |
|
111Z |
- |
5085,9 |
683 |
1135 |
- |
21 |
27 |
1072 |
15 |
|
112Х |
116,50 |
- |
- |
1136 |
12 |
- |
- |
1199 |
12 |
|
112Y |
116,55 |
5086,2 |
684 |
1136 |
36 |
36 |
42 |
1073 |
30 |
|
112Z |
- |
5086,5 |
685 |
1136 |
- |
21 |
27 |
1073 |
15 |
|
113Х |
116,60 |
- |
- |
1137 |
12 |
- |
- |
1200 |
12 |
|
113Y |
116,65 |
5086,8 |
686 |
1137 |
36 |
36 |
42 |
1074 |
30 |
|
113Z |
- |
5087,1 |
687 |
1137 |
- |
21 |
27 |
1074 |
15 |
|
114Х |
116,70 |
- |
- |
1138 |
12 |
- |
- |
1201 |
12 |
|
114Y |
116,75 |
5087,4 |
688 |
1138 |
36 |
36 |
42 |
1075 |
30 |
|
114Z |
- |
5087,7 |
689 |
1138 |
- |
21 |
27 |
1075 |
15 |
|
115Х |
116,80 |
- |
- |
1139 |
12 |
- |
- |
1202 |
12 |
|
115Y |
116,85 |
5088,0 |
690 |
1139 |
36 |
36 |
42 |
1076 |
30 |
|
115Z |
- |
5088,3 |
691 |
1139 |
- |
21 |
27 |
1076 |
15 |
|
116Х |
116,90 |
- |
- |
1140 |
12 |
- |
- |
1203 |
12 |
|
116Y |
116,95 |
5088,6 |
692 |
1140 |
36 |
36 |
42 |
1077 |
30 |
|
116Z |
- |
5088,9 |
693 |
1140 |
- |
21 |
27 |
1077 |
15 |
|
117Х |
117,00 |
- |
- |
1141 |
12 |
- |
- |
1204 |
12 |
|
117Y |
117,05 |
5089,2 |
694 |
1141 |
36 |
36 |
42 |
1078 |
30 |
|
117Z |
- |
5089,5 |
695 |
1141 |
- |
21 |
27 |
1078 |
15 |
|
118Х |
117,10 |
- |
- |
1142 |
12 |
- |
- |
1205 |
12 |
|
118Y |
117,15 |
5089,8 |
696 |
1142 |
36 |
36 |
42 |
1079 |
30 |
|
118Z |
- |
5090,1 |
697 |
1142 |
- |
21 |
27 |
1079 |
15 |
|
119Х |
117,20 |
- |
- |
1143 |
12 |
- |
- |
1206 |
12 |
|
119Y |
117,25 |
5090,4 |
698 |
1143 |
36 |
36 |
42 |
1080 |
30 |
|
119Z |
- |
5090,7 |
699 |
1143 |
- |
21 |
27 |
1080 |
15 |
|
120Х |
117,30 |
- |
- |
1144 |
12 |
- |
- |
1207 |
12 |
|
120Y |
117,35 |
- |
- |
1144 |
36 |
- |
- |
1081 |
30 |
|
121Х |
117,40 |
- |
- |
1145 |
12 |
- |
- |
1208 |
12 |
|
121Y |
117,45 |
- |
- |
1145 |
36 |
- |
- |
1082 |
30 |
|
122Х |
117,50 |
- |
- |
1146 |
12 |
- |
- |
1209 |
12 |
|
122Y |
117,55 |
- |
- |
1146 |
36 |
- |
- |
1083 |
30 |
|
123Х |
117,60 |
- |
- |
1147 |
12 |
- |
- |
1210 |
12 |
|
123Y |
117,65 |
- |
- |
1147 |
36 |
- |
- |
1084 |
30 |
|
124Х |
117,70 |
- |
- |
1148 |
12 |
- |
- |
1211 |
12 |
|
124Y** |
117,75 |
- |
- |
1148 |
36 |
- |
- |
1085 |
30 |
|
125Х |
117,80 |
- |
- |
1149 |
12 |
- |
- |
1212 |
12 |
|
125Y** |
117,85 |
- |
- |
1149 |
36 |
- |
- |
1086 |
30 |
|
126Х |
117,90 |
- |
- |
1150 |
12 |
- |
- |
1213 |
12 |
|
126Y** |
117,95 |
- |
- |
1150 |
36 |
- |
- |
1087 |
30 |
|
* Канал, зарезервированный исключительно для национальных нужд. ** Канал, используемый для национальных нужд только в том случае, если он не используется для защиты системы вторичной радиолокации. *** Частота 108,0 МГц предусмотрена для системы МЛС. Связанный с ней рабочий канал ДМЕ № 17Х может быть использован для аварийных целей. |
|||||||||
Таблица Б.2 - Размещение во времени элементов преамбулы*
|
Номер периода (такта) тактовой частоты** 15625 Гц |
Время начала передачи элемента и конца такта, мкс |
|
|
Несущая частота для синхронизации гетеродина приемника |
0 |
0 |
|
Код опорного времени приемника*** |
||
|
I1 = 1 |
13 |
832 |
|
I2 = 1 |
14 |
896 |
|
I3 = 1 |
15 |
960 |
|
I4 = 0 |
16 |
1024 |
|
I5 = 1 |
17 |
1088*4 |
|
Код опознавания вида обслуживания*5 |
||
|
I6 |
18 |
1152 |
|
I7 |
19 |
1216 |
|
I8 |
20 |
1280 |
|
I9 |
21 |
1344 |
|
I10 |
22 |
1408 |
|
I11 |
23 |
1472 |
|
I12 |
24 |
1536 |
|
Конец преамбулы |
- |
1600 |
|
* Для всех видов углового наведения и данных. ** Началу элемента соответствует конец указанного такта. *** I1 - I12 - номера битов кодов опорного времени и опознавания вида обслуживания. *4 Опорное время для обработки в приемнике сигналов наведения. *5 Смысловое значение битов кода (логические 1 и 0) определяется в соответствии с обозначаемым видом обслуживания по таблице Б.11. |
||
Таблица Б.3 - Размещение во времени элементов сигнала наведения по азимуту захода на посадку
|
Номер периода тактовой частоты 15625 Гц |
Время начала передачи элемента, мкс |
|
|
Преамбула |
0 |
0 |
|
Код Морзе |
25 |
1600 |
|
Выбор антенны |
26 |
1664 |
|
Задний сигнал СИПВЗН |
32 |
2048 |
|
Левый сигнал СИПВЗН |
34 |
2176 |
|
Правый сигнал СИПВЗН |
36 |
2304 |
|
Контрольный сигнал «Туда» |
38 |
2432 |
|
Сканирование «Туда»* |
40 |
2560 |
|
Пауза сканирования |
- |
8760 |
|
Средняя точка сканирования |
- |
9060 |
|
Сканирование «Обратно» |
- |
9360 |
|
Контрольный сигнал «Обратно» |
- |
15560 |
|
Конец излучения |
- |
15688 |
|
Конец защитного интервала |
- |
15900 |
|
* Интервал сканирования обеспечивает максимальное сканирование в пределах ± 62°; фактически начало и окончание сканирования (соответственно «Туда» и «Обратно») определяют выбранным размером сектора пропорционального наведения. |
||
Таблица Б.4 - Размещение во времени элементов сигнала наведения по азимуту захода на посадку с высокой частотой обновления сигналов и по азимуту ухода на второй круг
|
Наименование элемента |
Номер периода тактовой частоты 15625 Гц |
Время начала передачи элемента, мкс |
|
Преамбула |
0 |
0 |
|
Код Морзе |
25 |
1600 |
|
Выбор антенны |
26 |
1664 |
|
Задний сигнал СИПВЗН |
32 |
2048 |
|
Левый сигнал СИПВЗН |
34 |
2176 |
|
Правый сигнал СИПВЗН |
36 |
2304 |
|
Контрольный сигнал «Туда» |
38 |
2432 |
|
Сканирование «Туда»* |
40 |
2560 |
|
Пауза сканирования |
- |
6760 |
|
Средняя точка сканирования |
- |
7060 |
|
Сканирование «Обратно» |
- |
7360 |
|
Контрольный сигнал «Обратно» |
- |
11560 |
|
Конец излучения |
- |
11688 |
|
Конец защитного интервала |
- |
11900 |
|
* Интервал сканирования обеспечивает максимальное сканирование в пределах ± 42°; фактически начало и окончание сканирования (соответственно «Туда» и «Обратно») определяют выбранным размером сектора пропорционального наведения. |
||
Таблица Б.5 - Размещение во времени элементов сигнала наведения по углу места захода на посадку
|
Номер периода тактовой частоты 15625 Гц |
Время начала передачи элемента, мкс |
|
|
Преамбула |
0 |
0 |
|
Пауза процессора |
25 |
1600 |
|
Сигнал СИПВЗН |
27 |
1728 |
|
Сканирование «Туда»* |
29 |
1856 |
|
Пауза сканирования |
- |
3406 |
|
Средняя точка сканирования |
- |
3606 |
|
Сканирование «Обратно» |
- |
3806 |
|
Конец излучения |
- |
5356 |
|
Конец защитного интервала |
- |
5600 |
|
* Интервал сканирования обеспечивает максимальное сканирование от минус 1,5° до плюс 29,5°; фактически начало и окончание сканирования (соответственно «Туда» и «Обратно») определяют выбранным размером сектора пропорционального наведения. |
||
Таблица Б.6 - Размещение во времени элементов сигнала наведения по углу места при выравнивании
|
Номер периода тактовой частоты 15625 Гц |
Время начала передачи элемента, мкс |
|
|
Преамбула |
0 |
0 |
|
Пауза процессора |
25 |
1600 |
|
Сигнал СИПВЗН |
27 |
1728 |
|
Сканирование «Туда»* |
29 |
1856 |
|
Пауза сканирования |
- |
3056 |
|
Средняя точка сканирования |
- |
3456 |
|
Сканирование «Обратно» |
- |
3856 |
|
Конец излучения |
- |
5056 |
|
Конец защитного интервала |
- |
5300 |
|
* Интервал сканирования обеспечивает максимальное сканирование от минус 2,0° до плюс 10,0°; фактически начало и окончание сканирования (соответственно «Туда» и «Обратно») определяют выбранным размером сектора пропорционального наведения. |
||
Таблица Б.7 - Размещение во времени элементов сигнала основных данных
|
Номер периода тактовой частоты 15625 Гц |
Время начала передачи элемента, мкс |
|
|
Преамбула (биты I1 - I12) |
0 |
0 |
|
Передача данных (биты I13 - I30) |
25 |
1600 |
|
Передача четности (биты I31 - I32) |
43 |
2752 |
|
Конец измерения |
45 |
2880 |
|
Конец защитного интервала |
- |
3100 |
Таблица Б.8 - Размещение во времени элементов сигналов вспомогательных данных
|
Номер периода тактовой частоты 15625 Гц |
Время начала передачи элемента, мкс |
|
|
Преамбула (биты I1 - I12) |
0 |
0 |
|
Передача адреса (биты I13 - I20) |
25 |
1600 |
|
Передача данных (биты I21 - I69) |
33 |
2112 |
|
Передача четности (биты I70 - I76) |
82 |
5248 |
|
Конец измерения |
89 |
5696 |
|
Конец защитного интервала |
- |
5900 |
Таблица Б.9 - Зависимость излучения видов обслуживания системы МЛС в случае отказа одного из них
|
Виды обслуживания |
|||||||
|
Наведение по азимуту захода на посадку |
Наведение по углу места при заходе на посадку |
Наведение при выравнивании |
Наведение по азимуту ухода на второй круг |
Передача основных данных |
Наведение по дальности |
Передача вспомогательных данных |
|
|
Наведение по азимуту захода на посадку |
* |
* |
* |
||||
|
Наведение по углу места при заходе на посадку |
* |
||||||
|
Наведение при выравнивании |
* |
||||||
|
Наведение по азимуту ухода на второй круг |
* |
||||||
|
Передача основных данных |
* |
||||||
|
Наведение по дальности |
* |
||||||
|
Передача вспомогательных данных |
* |
||||||
|
Примечание - Знаком * отмечены виды обслуживания, излучение при которых запрещено. |
|||||||
Таблица Б.10 - Содержание и максимальный интервал между словами основных данных
|
Содержание сообщения |
Максимальное время между словами, с |
Число используемых тактов |
Диапазон сообщаемых значений |
Цена градации |
Номер бита от начала опорного времени |
|
|
1 |
Преамбула |
12 |
Примечание 1 |
I1 - I12 |
||
|
Расстояние от фазового центра антенны радиомаяка наведения по азимуту захода на посадку до порога ВПП |
1,0 |
6 |
От 0 до 6300 м |
100 м |
I13 - I18 |
|
|
Граница сектора отрицательных углов пропорционального наведения по азимуту захода на посадку |
1,0 |
5 |
От 0° до минус 60°. Примечание 2 |
2° |
I19 - I23 |
|
|
Граница сектора положительных углов пропорционального наведения по азимуту захода на посадку |
1,0 |
5 |
От 0° до 60°. Примечание 2 |
2° |
I24 - I28 |
|
|
Сигнал вида клиренса |
1,0 |
1 |
Примечание 3 |
I29 |
||
|
Резерв |
1,0 |
1 |
Примечание 4 |
I30 |
||
|
Четность |
1,0 |
2 |
Примечание 5 |
I31 - I32 |
||
|
2 |
Преамбула |
12 |
Примечание 1 |
I1 - I12 |
||
|
Минимальная глиссада |
0,16 |
7 |
От 2° до 14,7° |
0,1° |
I13 - I19 |
|
|
Состояние радиомаяка наведения по азимуту ухода на второй круг |
0,16 |
1 |
Примечание 6 |
I20 |
||
|
Состояние НРД |
0,16 |
2 |
Примечание 7 |
I21 - I22 |
||
|
Состояние радиомаяка наведения по азимуту захода на посадку |
0,16 |
1 |
Примечание 6 |
I23 |
||
|
Состояние радиомаяка наведения по углу места при заходе на посадку |
0,16 |
1 |
Примечание 6 |
I24 |
||
|
Резерв |
0,16 |
6 |
Примечания 4 и 8 |
I25 - I30 |
||
|
Четность |
0,16 |
2 |
Примечание 5 |
I31 - I32 |
||
|
3 |
Преамбула |
12 |
Примечание 1 |
I1 - I12 |
||
|
Ширина луча радиомаяка наведения по азимуту захода на посадку |
1,0 |
3 |
От 0,5° до 4°. Примечание 9 |
0,5° |
I13 - I15 |
|
|
Ширина луча радиомаяка наведения по углу места захода на посадку |
1,0 |
3 |
От 0,5° до 2,5°. Примечание 9 |
0,5° |
I16 - I18 |
|
|
Расстояние от НРД |
1,0 |
9 |
От 0 до 6387,5 м |
I19 - I27 |
||
|
Резерв |
1,0 |
3 |
Примечание 4 |
I28 - I30 |
||
|
Четность |
1,0 |
2 |
Примечание 5 |
I31 - I32 |
||
|
4 |
Преамбула |
12 |
Примечания 1 и 10 |
I1 - I12 |
||
|
Ориентация радиомаяка наведения по азимуту захода на посадку |
1,0 |
9 |
От 0° до 359° |
1° |
I13 - I21 |
|
|
Ориентация радиомаяка наведения по азимуту ухода на второй круг |
1,0 |
9 |
От 0° до 359° |
1° |
I22 - I30 |
|
|
Четность |
1,0 |
2 |
Примечание 5 |
I31 - I32 |
||
|
5 |
Преамбула |
12 |
Примечания 1 и 11 |
I1 - I12 |
||
|
Граница сектора отрицательных углов наведения ЛА по азимуту ухода на второй круг |
1,0 |
5 |
От 0° до 40°. Примечание 2 |
2° |
I13 - I17 |
|
|
Граница сектора положительных углов наведения ЛА по азимуту ухода на второй круг |
1,0 |
5 |
От 0° до 40°. Примечание 2 |
2° |
I18 - I22 |
|
|
Ширина луча радиомаяка наведения ЛА по азимуту ухода на второй круг |
1,0 |
3 |
От 0,5° до 4,0°. Примечание 9 |
0,5° |
I23 - I25 |
|
|
Состояние радиомаяка ухода на второй круг |
1,0 |
1 |
Примечание 6 |
I26 |
||
|
Резерв |
1,0 |
4 |
Примечание 12 |
I27 - I30 |
||
|
Четность |
1,0 |
2 |
Примечание 5 |
I31 - I32 |
||
|
6 |
Преамбула |
12 |
Примечания 1 и 10 |
I1 - I12 |
||
|
Опознавание наземного оборудования: |
1,0 |
|||||
|
Знак 2 |
6 |
I13 - I18 |
||||
|
Знак 3 |
6 |
I19 - I24 |
||||
|
Знак 4 |
6 |
I25 - I30 |
||||
|
Четность |
1,0 |
2 |
Примечание 5 |
I31 - I32 |
||
|
Примечания 1 12 битам данных преамбулы предшествует интервал продолжительностью 0,832 мс (13 синхронизирующих импульсов) для выделения несущей частоты (таблица Б.2). 2 Пределы сканирования будут выходить за границы сектора пропорционального наведения, указанные в словах 1 и 5 основных данных в соответствии с таблицей 2. 3 Код для бита I29: 0 - импульсный сигнал клиренсного наведения; 1 - сканирующий сигнал клиренсного наведения. 4 Все резервные биты устанавливаются на ноль. 5 Биты четности I31 и I32 выбираются с целью удовлетворения уравнениям I13 + I14, + ..., + I29 + I30 + I31 = нечетная величина, I14 + I16 + I18, ..., + I28 + I30 + I32 = нечетная величина. 6 Кодирование битов состояния: 0 - наведение не осуществляется (устройство не является надежным для навигации), 1 - наведение осуществляется в обычном режиме (для радиомаяка наведения по азимуту ухода на второй круг означает, что должна последовать передача этого радиомаяка). 7 Кодирование для битов I21 и I22: I21 I22 0 0 - НРД не работает или не установлен; 1 0 - Имеется только режим НЭП или НРД/Н; 0 1 - Имеется режим КЭП, класс точности 1; 1 1 - Имеется режим КЭП, класс точности 2. 8 Номера указанных битов зарезервированы для использования в будущем, когда потребуется более высокая скорость обновления информации. 9 Значение, кодируемое для этих данных, должно представлять фактическую ширину луча (в соответствии с ГОСТ 26566), округленную до ближайших 0,5°. 10 Слова основных данных 4 и 6 передаются как для зоны наведения по азимуту захода на посадку, так и для зоны наведения по азимуту ухода на второй круг, если обеспечивается наведение по азимуту ухода на второй круг при сохранении указанного максимального времени между передачами слов в каждом секторе зоны действия. 11 Слово основных данных 5 передается как в зону наведения по азимуту захода на посадку, так и в зону наведения по азимуту ухода на второй круг, если обеспечивается наведение по азимуту ухода на второй круг при сохранении указанного максимального времени между передачами в каждом секторе зоны действия. 12 Эти биты резервируются для использования в будущем. Одно из возможных применений - определение коэффициента шкалы отклонения по азимуту ухода на второй круг. |
||||||
Таблица Б.11 - Коды опознавания видов обслуживания
|
Код опознавания |
|||||||
|
I6 |
I7 |
I8 |
I9 |
I10 |
I11 |
I12 |
|
|
Наведение по азимуту захода на посадку |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
|
Наведение по азимуту захода на посадку с высокой частотой обновления сигналов |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
|
Наведение по углу места захода на посадку |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
|
Наведение по углу места при выравнивании |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
|
Наведение по азимуту при уходе на второй круг |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
|
Наведение по азимуту 360° |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
|
Основные данные, слово 1 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
|
Основные данные, слово 2 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
|
Основные данные, слово 3 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
|
Основные данные, слово 4 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
|
Основные данные, слово 5 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
|
Основные данные, слово 6 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
|
Вспомогательные данные А |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
|
Вспомогательные данные В |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
|
Вспомогательные данные С |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
|
Примечание - Коды опознавания выбраны таким образом, что биты четности I11 и I12 удовлетворяют следующим уравнениям: I6 + I7 + I8 + I9 + I10 + I11 = четному числу; I6 + I8 + I10 + I12 = четному числу. |
|||||||
Таблица Б.12 - Вспомогательные данные А
|
Содержание данных |
Тип данных |
Максимальное время между передачами, с |
Число используемых тактов |
Диапазон передаваемых значений |
Градация сообщений |
Номера битов |
|
|
А-1 |
Преамбула |
Цифровой |
1,0 |
12 |
Примечание 1 |
I1 - Il2 |
|
|
Адрес |
То же |
1,0 |
8 |
I13 - I20 |
|||
|
Смещение антенны АРМ |
То же |
1,0 |
10 |
От -511 до +511 м. Примечание 2 |
1 м |
I21 - I30 |
|
|
Расстояние от антенны АРМ до точки начала отсчета МЛС |
» |
1,0 |
13 |
От 0 до 8191 м |
1 м |
I31 - I43 |
|
|
Согласование АРМ с осевой линией ВПП |
» |
1,0 |
12 |
От -20,47° до +20,47°. Примечание 2 и 3 |
0,01° |
I44 - I55 |
|
|
Система координат антенны АРМ |
» |
1,0 |
1 |
Примечание 4 |
I56 |
||
|
Высота антенны АРМ |
» |
1,0 |
7 |
От -63 до +63 м Примечание 2 |
1 м |
I57 - I63 |
|
|
Резерв |
» |
1,0 |
6 |
Примечание 5 |
I64 - I69 |
||
|
Четность |
» |
1,0 |
7 |
Примечание 6 |
I70 - I76 |
||
|
А-2 |
Преамбула |
Цифровой |
1,0 |
12 |
Примечание 1 |
I1 - Il2 |
|
|
Адрес |
То же |
1,0 |
8 |
I13 - I20 |
|||
|
Смещение антенны УРМ |
» |
1,0 |
10 |
От -511 до +511 м. Примечание 2 |
1 м |
I21 - I30 |
|
|
Расстояние от точки начала отсчета МЛС до порога ВПП |
» |
1,0 |
10 |
От 0 до 1023 м |
1 м |
I31 - I40 |
|
|
Высота антенны УРМ |
» |
1,0 |
7 |
От -6,3 до +6,3 м. Примечание 2 |
0,1 м |
I41 - I47 |
|
|
Превышение точки начала отсчета МЛС |
» |
1,0 |
13 |
От -4095 до +4095 м. Примечание 2 |
1 м |
I48 - I60 |
|
|
Высота порога ВПП |
» |
1,0 |
7 |
От -6,3 до +6,3 м. Примечание 2 |
0,1 м |
I61 - I67 |
|
|
Резерв |
» |
1,0 |
2 |
Примечание 5 |
I68 - I69 |
||
|
Четность |
» |
1,0 |
7 |
Примечание 6 |
I70 - I76 |
||
|
А-3 |
Преамбула (примечание 7) |
Цифровой |
1,0 |
12 |
Примечание 1 |
I1 - Il2 |
|
|
Адрес |
То же |
1,0 |
8 |
I13 - I20 |
|||
|
Смещение НРД |
» |
1,0 |
12 |
От -2047 до +2047 м. Примечание 2 |
1 м |
I21 - I32 |
|
|
Расстояние от НРД до точки начала отсчета МЛС |
» |
1,0 |
14 |
От -8191 до +8191 м |
1 м |
I33 - I46 |
|
|
Высота антенны НРД |
» |
1,0 |
7 |
От -63 до +63 м. Примечание 2 |
1 м |
I47 - I53 |
|
|
Расстояние до дальнего конца ВПП |
» |
1,0 |
14 |
От 0 до 16383 м |
1 м |
I54 - I67 |
|
|
Резерв |
» |
1,0 |
2 |
Примечание 5 |
I68 - I69 |
||
|
Четность |
» |
1,0 |
7 |
Примечание 6 |
I70 - I76 |
||
|
А-4 |
Преамбула (примечание 8) |
Цифровой |
1,0 |
12 |
Примечание 1 |
I1 - Il2 |
|
|
Адрес |
То же |
1,0 |
8 |
I13 - I20 |
|||
|
Смещение антенны РУВК |
» |
1,0 |
10 |
От -511 до +511 м. Примечание 2 |
1 м |
I21 - I30 |
|
|
Расстояние от РУВК до точки начала отсчета МЛС |
» |
1,0 |
11 |
От 0 м до 2047 м |
1 м |
I31 - I41 |
|
|
Согласование РУВК с осевой линией ВПП |
» |
1,0 |
12 |
От -20,47° до +20,47°. Примечания 2 и 3 |
0,01° |
I42 - I53 |
|
|
Система координат антенны РУВК |
» |
1,0 |
1 |
Примечание 4 |
I54 |
||
|
Высота антенны РУВК |
» |
1,0 |
7 |
От -63 до +63 м. Примечание 2 |
1 м |
I55 - I61 |
|
|
Резерв |
» |
1,0 |
8 |
Примечание 5 |
I62 - I69 |
||
|
Четность |
» |
1,0 |
7 |
Примечание 6 |
I70 - I76 |
||
|
Примечания 1 12 битам данных преамбулы предшествует интервал продолжительностью 0,832 мс (13 синхронизирующих импульсов) передачи несущей частоты для ее выделения (таблица Б.2). 2 Условия кодирования знака чисел следующие: самый старший бит (MSB) является знаковым битом: 0 - положительная величина, 1 - отрицательная величина. Другие биты представляют собой абсолютную величину. Условное обозначение расположения антенны следующее: если смотреть от опорной точки системы МЛС для захода на посадку в направлении точки начала отсчета системы МЛС, положительное число представляет собой расположение справа от оси ВПП (боковое смещение) или над ВПП (вертикальное смещение), или в направлении остановочного конца ВПП (продольное расстояние). Условное обозначение ориентации антенны следующее: если смотреть на летное поле сверху, положительное число представляет собой вращение по часовой стрелке от оси ВПП в сторону соответствующего нулевого азимута. 3 Слова Б-42 и Б-43 данных, определенные для применения в тех случаях, когда требуется вращение азимутальной антенны более чем на 20,47°, которое обеспечивается элементами данных в слове А-1 для азимута и слове А-4 для азимута ухода на второй круг (см. таблицу Б.13). Устройство, вращение антенны азимута захода на посадку которого превышает 20,47°, передает слово Б-42 вместо слова А-1. Устройство, вращение антенны азимута ухода на второй круг которого превышает 20,47°, передает слово Б-43 вместо слова А-4. 4 Код для координат антенны: 0 - коническая; 1 - планарная. 5 Все резервные биты устанавливаются на ноль. 6 Биты четности с I70 по I76 выбираются для удовлетворения приводимых ниже уравнений: для бита I70 четная величина = (I13, + ..., + I18) + I20 + I22 + I24 + I25 + I28 + I29 + I31 + I32 + I33 + I35 + I36 + I38 + I41 + I44 + I45 + I46 + I50 + (I52, + ..., + I55) + I58 + I60 + I64 + I65 + I70; для бита I71 четная величина = (I14, + ..., + I19) + I21 + I23 + I25 + I26 + I29 + I30 + I32 + I33 + I34 + I36 + I37 + I39 + I42 + I45 + I46 + I47 + I51 + (I53, + ..., + I56) + I59 + I61 + I65 + I66 + I71; для бита I72 четная величина = (I15, + ..., + I20) + I22 + I24 + I26 + I27 + I30 + I31 + I33 + I34 + I35 + I37 + I38 + I40 + I43 + I46 + I47 + I48 + I52 + (I54, + ..., + I57) + I60 + I62 + I66 + I67 + I72; для бита I73 четная величина = (I16, + ..., + I21) + I23 + I25 + I27 + I28 + I31 + I32 + I34 + I35 + I36 + I38 + I39 + I41 + I44 + I47 + I48 + I49 + I53 + (I55, + ..., + I58) + I61 + I63 + I67 + I68 + I73; для бита I74 четная величина = (I17, + ..., + I22) + I24 + I26 + I28 + I29 + I32 + I33 + I35 + I36 + I37 + I39 + I40 + I42 + I45 + I48 + I49 + I50 + I54 + (I56, + ..., + I59) + I62 + I64 + I68 + I69 + I74; для бита I75 четная величина = (I13, + ..., + I17) + I19 + I21 + I23 + I24 + I27 + I28 + I30 + I31 + I32 + I34 + I35 + I37 + I40 + I43 + I44 + I45 + I49 + (I51, + ..., + I54) + I57 + I59 + I63 + I64 + I69 + I75; для бита I76 четная величина = I13 + I14, + ..., + I75 + I76. 7 Слово данных А-3 передается в зонах действия АРМ и РУВК, если обеспечивается наведение по азимуту ухода на второй круг при сохранении указанного максимального времени между передачами в каждом секторе зоны действия. 8 Слово данных А-4 передается в зонах наведения АРМ и РУВК, если обеспечивается наведение по азимуту ухода на второй круг при сохранении указанного максимального времени между передачами в каждом секторе зоны действия. |
|||||||
Таблица Б.13 - Слова вспомогательных данных Б
|
Содержание данных |
Тип данных |
Максимальное время между передачами, с |
Используемые биты |
Диапазон передаваемых значений |
Младший бит |
Номер бита |
|
|
Слова Б-1 - Б-39 - Неизменяемые со временем (постоянные) элементы данных, предназначенные для полетов с использованием МЛС Слова Б-40 - Б-54 - Прочие постоянные элементы данных |
|||||||
|
Б-40 |
Преамбула |
Цифровой |
2,0 |
12 |
Примечание 1 |
I1 - I12 |
|
|
Адрес |
То же |
2,0 |
8 |
I13 - I20 |
|||
|
Широта точки начала отсчета МЛС |
» |
2,0 |
23 |
-324000,0 с дуги +324000,0 с дуги. Примечание 2 |
0,1 с дуги |
I21 - I43 |
|
|
Долгота точки начала отсчета МЛС |
» |
2,0 |
24 |
-648000,0 с дуги +648000,0 с дуги. Примечание 2 |
0,1 с дуги |
I44 - I67 |
|
|
Резерв |
» |
2,0 |
2 |
Примечание 3 |
I68 - I69 |
||
|
Четность |
» |
2,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Б-41 |
Преамбула |
Цифровой |
2,0 |
12 |
Примечание 1 |
I1 - I12 |
|
|
Адрес |
То же |
2,0 |
8 |
I13 - I20 |
|||
|
Высота точки начала отсчета МЛС |
» |
2,0 |
13 |
От -4095 до +4095 м. Примечание 2 |
1 м |
I21 - I33 |
|
|
Ориентация азимута захода на посадку относительно истинного севера |
» |
2,0 |
16 |
От 0 до 359,99° |
0,01° |
I34 - I45 |
|
|
Резерв |
» |
2,0 |
20 |
I50 - I69 |
|||
|
Четность |
» |
2,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Б-42 |
Преамбула (примечание 5) |
Цифровой |
1,0 |
12 |
Примечание 1 |
I1 - I12 |
|
|
Адрес |
То же |
1,0 |
8 |
I13 - I20 |
|||
|
Смещение антенны азимута захода на посадку (АРМ) |
» |
1,0 |
10 |
От -511 до +511 м. Примечание 2 |
1 м |
I21 - I30 |
|
|
Расстояние от антенны азимута захода на посадку до точки начала отсчета МЛС |
» |
1,0 |
13 |
От 0 до 8191 м |
1 м |
I31 - I43 |
|
|
Согласование азимута захода на посадку с осевой линией ВПП |
» |
1,0 |
14 |
От -81,91 до +81,91° |
0,01° |
I44 - I67 |
|
|
Высота антенны азимута захода на посадку |
» |
1,0 |
7 |
От -63 до +63 м. Примечание 2 |
1 м |
I58 - I64 |
|
|
Резерв |
» |
1,0 |
5 |
Примечание 3 |
I65 - I69 |
||
|
Четность |
» |
1,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Б-43 |
Преамбула (примечания 5 и 6) |
Цифровой |
12 |
Примечание 1 |
I1 - I12 |
||
|
Адрес |
То же |
1,0 |
8 |
I13 - I20 |
|||
|
Смещение антенны наведения по азимуту ухода на второй круг |
» |
1,0 |
10 |
От -511 до +511 м. Примечание 2 |
1 м |
I21 - I30 |
|
|
Расстояние от антенны наведения по азимуту ухода на второй круг до точки начала отсчета МЛС |
» |
1,0 |
11 |
От 0 до 2047 м |
1 м |
I31 - I41 |
|
|
Согласование азимута ухода на второй круг с осевой линией ВПП |
» |
1,0 |
14 |
От -81,91° до +81,91°. Примечание 2 |
0,01° |
I42 - I55 |
|
|
Высота антенны наведения по азимуту ухода на второй круг |
» |
1,0 |
7 |
От -63 до +63 м. Примечание 2 |
1 м |
I56 - I62 |
|
|
Резерв |
» |
1,0 |
7 |
Примечание 3 |
I63 - I69 |
||
|
Четность |
» |
1,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Б-44 |
Преамбула |
Цифровой |
2,0 |
12 |
Примечание 1 |
I1 - I12 |
|
|
Адрес |
То же |
2,0 |
8 |
I13 - I20 |
|||
|
Номер главной ВПП |
» |
2,0 |
6 |
От 0 до 36. Примечание 7 |
I21 - I26 |
||
|
Буквенный знак главной ВПП |
Цифровой |
2,0 |
2 |
Примечание 8 |
I27 - I28 |
||
|
Номер вспомогательной ВПП |
То же |
2,0 |
6 |
От 0 до 36. Примечание 7 |
I29 - I34 |
||
|
Буквенный знак вспомогательной ВПП |
» |
2,0 |
2 |
Примечание 8 |
I35 - I36 |
||
|
Наведение по углу места на вспомогательную ВПП |
» |
2,0 |
2 |
Примечание 9 |
I37 - I38 |
||
|
Минимальная глиссада захода на посадку на вспомогательную ВПП |
» |
2,0 |
7 |
От 2° до 14,7° |
0,1° |
I39 - I45 |
|
|
Согласование азимута захода на посадку с осевой линией вспомогательной ВПП |
» |
2,0 |
16 |
+ 180,00° |
0,01° |
I46 - I61 |
|
|
Резерв |
» |
2,0 |
8 |
Примечание 3 |
I62 - I69 |
||
|
Четность |
» |
2,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Б-45 |
Преамбула |
Цифровой |
12 |
Примечание 1 |
I1 - I12 |
||
|
Адрес |
2,0 |
8 |
I13 - I20 |
||||
|
X координата порога вспомогательной ВПП |
То же |
2,0 |
15 |
+16384 м |
1 м |
I21 - I35 |
|
|
Y координата порога вспомогательной ВПП |
» |
2,0 |
15 |
+16384 м |
1 м |
I36 - I50 |
|
|
Z координата порога вспомогательной ВПП |
» |
2,0 |
8 |
+127 м |
1 м |
I51 - I58 |
|
|
Высота пересечения порога вспомогательной ВПП |
» |
2,0 |
5 |
От 0 до 31 м |
1 м |
I59 - I63 |
|
|
Расстояние от условной азимутальной антенны до порога вспомогательной ВПП |
» |
2,0 |
6 |
От 0 до 6300 м |
100 м |
I64 - I69 |
|
|
Четность |
» |
2,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Слова Б-55 - Б-64 - Меняющиеся со временем элементы данных. Примечание - Ниже определяется содержание только слова Б-55. |
|||||||
|
Б-55 |
Преамбула |
Цифровой |
12 |
Примечание 1 |
I1 - I12 |
||
|
Адрес |
10,0 |
8 |
I13 - I20 |
||||
|
Зона приземления |
То же |
10,0 |
11 |
От 0 до 2555 м. Примечание 10 |
5 м |
I21 - I31 |
|
|
Средняя точка зоны приземления |
» |
10,0 |
11 |
От 0 до 2555 м. Примечание 10 |
5 м |
I32 - I42 |
|
|
Дальний конец ВПП |
Цифровой |
10,0 |
11 |
От 0 до 2555 м Примечание 10 |
5 м |
I43 - I53 |
|
|
Скорость приземного ветра |
То же |
10,0 |
7 |
От 0 до 127 узлов |
1 узел |
I54 - I60 |
|
|
Направление приземного ветра (магнитное) |
» |
10,0 |
9 |
От 0° до 359° |
1° |
I61 - I69 |
|
|
Четность |
» |
10,0 |
7 |
Примечание 4 |
I70 - I76 |
||
|
Примечания 1 12 битам данных преамбулы предшествует интервал продолжительностью 0,832 мс (13 синхронизирующих импульсов) передачи несущей частоты для ее выделения. 2 Условие кодирования отрицательных номеров следующее: Самый старший бит является знаковым битом: 0 - положительная величина; 1 - отрицательная величина. Другие биты представляют собой абсолютную величину. Условное обозначение расположения антенны: если смотреть от опорной точки МЛС для захода на посадку в направлении точки начала отсчета МЛС, положительный номер представляет собой расположение справа от осевой линии ВПП (боковое смещение) или над ВПП (вертикальное смещение), или в направлении дальнего конца ВПП (продольное расстояние). Условное обозначение ориентации антенны: в проекции сверху положительное число представляет собой вращение по часовой стрелке от осевой линии ВПП в сторону соответствующего направления наведения, равного 0°. 3 Все резервные биты устанавливаются на ноль. 4 Биты четности I70 до I76 выбираются для удовлетворения приводимых ниже уравнений: для бита I70: четная величина = (I13, + ..., + I18) + I20 + I22 + I24 + I25 + I28 + I29 + I31 + I32 + I33 + I35 + I36 + I38 + I41 + I44 + I45 + I46 + I50 + (I52, + ..., + I55) + I58 + I60 + I64 + I65 + I70; для бита I71: четная величина = (I14, + ..., + I19) + I21 + I23 + I25 + I26 + I29 + I30 + I32 + I33 + I34 + I36 + I37 + I39 + I42 + I45 + I46 + I47 + I51 + (I53, + ..., + I56) + I59 + I61 + I65 + I66 + I71; для бита I72: четная величина = (I15, + ..., + I20) + I22 + I24 + I26 + I27 + I30 + I31 + I33 + I34 + I35 + I37 + I38 + I40 + I43 + I46 + I47 + I48 + I52 + (I54, + ..., + I57) + I60 + I62 + I66 + I67 + I72; для бита I73: четная величина = (I16, + ..., + I21) + I23 + I25 + I27 + I28 + I31 + I32 + I34 + I35 + I36 + I38 + I39 + I41 + I44 + I47 + I48 + I49 + I53 + (I55, + ..., + I58) + I61 + I63 + I67 + I68 + I73; для бита I74: четная величина = (I17, + …, + I22) + I24 + I26 + I28 + I29 + I32 + I33 + I35 + I36 + I37 + I39 + I40 + I42 + I45 + I48 + I49 + I50 + I54 + (I56, + ..., + I59) + I62 + I64 + I68 + I69 + I74; для бита I75: четная величина = (I13, + ..., + I17) + I19 + I21 + I23 + I24 + I27 + I28 + I30 + I31 + I32 + I34 + I35 + I37 + I40 + I43 + I44 + I45 + I49 + (I51, + ..., + I54) + I57 + I59 + I63 + I64 + I69 + I75; для бита I76: четная величина = I13 + I14, + ..., + I75 + I76. 5 Слова Б-42 и Б-43 данных определены для применения в тех случаях, когда требуется вращение азимутальной антенны более чем на 20,47°, которое обеспечивается элементами данных в слове А-1 для азимута и слове А-4 для азимута ухода на второй круг. Устройство, вращение антенны азимута захода на посадку которого превышает 20,47°, передает слово Б-42 вместо слова А-1. Устройство, вращение антенны наведения по азимуту ухода на второй круг которого превышает 20,47°, передает слово Б-43 вместо слова А-4. 6 Слово данных Б-43 (когда используется) передается в секторах зоны действия азимута захода на посадку и азимута ухода на второй круг, если обеспечивается наведение по азимуту ухода на второй круг при сохранении указанного максимального времени между передачами в каждой зоне. 7 Номер 0 ВПП используется при выполнении операций на вертодроме. 8 Условия кодирования следующие: 0 - без буквы; 1 - R (вправо); 2 - С (центр); 3 - L (влево). 9 Условия кодирования следующие: 0 - не обеспечивается; 1 - необработанные данные наведения по углу места; 2 - вычисляемая глиссада; 3 - код использовать не разрешается. 10 В целях обеспечения информации типа «тренд» для передачи каждого значения дальности видимости на ВПП используются десятый и одиннадцатый биты. Условие кодирования следующее: Десятый бит Одиннадцатый бит Отсутствует 0 0 Ослабление 1 0 Устойчивый 0 1 Усиление 1 1 |
|||||||
Таблица Б.14 - Задержки по времени сигналов НРД
|
Рабочий режим |
Разнесение пар импульсов, мкс |
Временная задержка, мкс |
|||
|
Запрос |
Ответ |
Время задержки 1-го импульса |
Время задержки 2-го импульса |
||
|
X* |
НРД/Н |
12 |
12 |
50 |
50 |
|
НРД/П НЭП |
12 |
12 |
50 |
- |
|
|
НРД/П КЭП |
18 |
12 |
56 |
- |
|
|
Y** |
НРД/Н |
36 |
30 |
56 |
50 |
|
НРД/П НЭП |
36 |
30 |
56 |
50 |
|
|
НРД/П КЭП |
42 |
30 |
62 |
- |
|
|
W* |
НРД/Н |
- |
- |
- |
- |
|
НРД/П НЭП |
24 |
24 |
50 |
- |
|
|
НРД/П КЭП |
30 |
24 |
56 |
- |
|
|
Z** |
НРД/Н |
- |
- |
- |
- |
|
НРД/П НЭП |
21 |
15 |
56 |
- |
|
|
НРД/П КЭП |
27 |
15 |
62 |
- |
|
|
* Каналы X и W с одинаковым номером излучают на одинаковых частотах НРД. ** Каналы Y и Z с одинаковым номером излучают на одинаковых частотах НРД. |
|||||
ПРИЛОЖЕНИЕ В
(справочное)
Рекомендуемые последовательности сигналов, излучаемых угломерными устройствами
Таблица В.1 - Пара последовательностей сигналов, обеспечивающая возможность использования всех угломерных видов обслуживания системы посадки
|
Последовательность 1 |
Последовательность 2 |
0 |
|
|
5,6 |
Угол места захода на посадку |
Угол места захода на посадку |
5,6 |
|
10,9 |
Выравнивание |
Выравнивание |
10,9 |
|
26,8 |
Азимут захода на посадку |
Азимут захода на посадку |
26,8 |
|
32,1 |
Выравнивание |
Выравнивание |
32,1 |
|
37,7 |
Угол места захода на посадку |
Угол места захода на посадку |
37,7 |
|
40,8 |
Слово основных данных (примечания 1 и 2) |
Резерв времени для развития, равный 18,2 мс минимум (примечание 2) |
55,9 |
|
52,7 |
Азимут ухода на второй круг |
Резерв времени для развития, равный 18,2 мс минимум (примечание 2) |
55,9 |
|
55,8 |
Слово основных данных (примечание 2) |
||
|
61,4 |
Угол места захода на посадку |
Угол места захода на посадку |
61,5 |
|
66,7 |
Выравнивание |
Выравнивание |
66,8 |
|
Время, мс |
Время, мс |
||
|
Примечания 1 Если используют канал наведения по азимуту ухода на второй круг, слово № 2 основных данных должно передаваться в этом месте, т.е. перед передачей сигналов канала наведения по азимуту ухода на второй круг. 2 Слова данных могут передаваться в любое свободное время. 3 Суммарная длительность 1-й и 2-й последовательностей сигналов не должна превышать 134 мс. |
|||
Таблица В.2 - Пара последовательностей сигналов, обеспечивающая возможность использования канала наведения по азимуту захода на посадку с высокой частотой обновления
|
Последовательность 1 |
Последовательность 2 |
0 |
|
|
5,6 |
Угол места захода на посадку |
Угол места захода на посадку |
5,6 |
|
17,5 |
Азимут захода на посадку с высокой частотой обновления |
Азимут захода на посадку с высокой частотой обновления |
17,5 |
|
29,9 |
Слова данных (примечание 2) |
Слова данных (примечания 1 и 2) |
20,6 |
|
41,8 |
Азимут захода на посадку с высокой частотой обновления |
Азимут ухода на второй круг |
32,5 |
|
47,4 |
Угол места захода на посадку |
Азимут захода на посадку с высокой частотой обновления |
44,4 |
|
59,3 |
Азимут захода на посадку с высокой частотой обновления |
Угол места захода на посадку |
50,0 |
|
64,9 |
Угол места захода на посадку |
Азимут захода на посадку с высокой частотой обновления |
61,9 |
|
Время, мс |
Угол места захода на посадку |
67,5 |
|
|
Время, мс |
|||
|
Примечания 1 Если используют канал наведения по азимуту ухода на второй круг, слово № 2 основных данных должно передаваться в этом месте, т.е. перед передачей сигналов канала наведения по азимуту ухода на второй круг. 2 Слова данных могут передаваться в любое свободное время. 3 Суммарная длительность 1-й и 2-й последовательностей сигналов не должна превышать 134 мс. |
|||
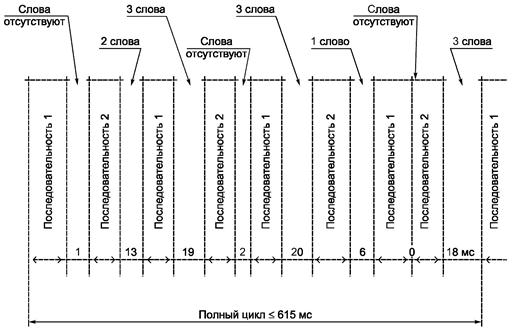
Рисунок B.1 - Полный цикл передачи сигналов системы посадки, показывающий наличие свободных периодов времени для передачи слов вспомогательных данных
Примечание - Каждая передача вида обслуживания является независимой и может производиться в любом месте последовательности, за исключением того, что слово 2 основных данных должно предшествовать передаче сигналов наведения по азимуту ухода на второй круг.
ПРИЛОЖЕНИЕ Г
(обязательное)
Условия сканирования лучей антенн устройств наведения

Рисунок Г.1 - Условия сканирования лучей антенн и сектора наведения угломерных устройств
Примечание - При изображенном положении ЛА угол наведения по азимуту захода на посадку отрицательный.
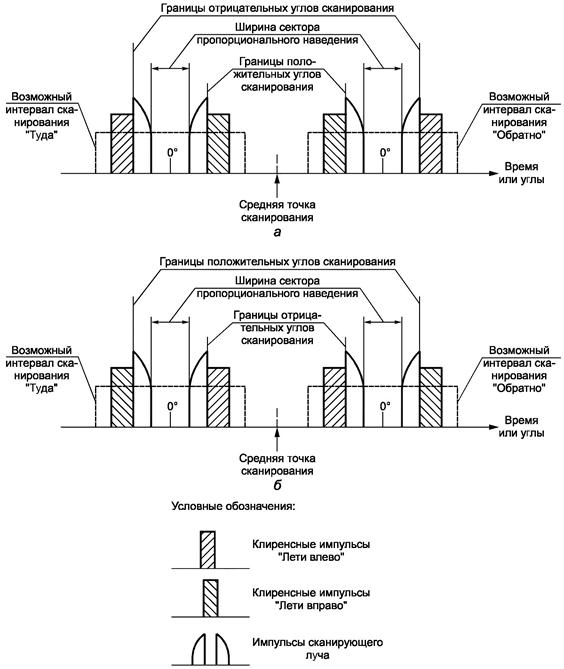
Рисунок Г.2 - Размещение во времени клиренсных сигналов радиомаяков наведения по азимуту
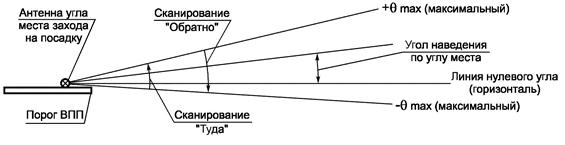
Рисунок Г.3 - Условия сканирования функции наведения по углу места захода на посадку
ПРИЛОЖЕНИЕ Д
(обязательное)
Формулы для расчета частотных характеристик фильтров
Таблица Д.1
|
Вид обслуживания |
Частота среза, рад/с |
||
|
ω0 |
ω1 |
ω2 |
|
|
Наведение по азимуту захода на посадку |
0,5 |
0,3 |
10 |
|
Наведение по углу места захода на посадку и по дальности |
1,5 |
0,5 |
10 |
|
Наведение при выравнивании |
2,0 |
0,5 |
10 |
Выходной фильтр приемника рассчитывается по формуле
![]()
Фильтр шумов управления рассчитывается по формуле
![]()
Фильтр погрешности следования по траектории рассчитывается по формуле
![]()
где ε = 1, ω0 = 0,64ωn;
f0, f1, f2 - функции (текущие значения) для графика построения частотных характеристик.
S = р + jω; р = 0 для аналоговых фильтров без потерь
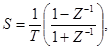
где Т - период выборки (для цифровой реализации фильтра),
Z - функция единичной задержки теории Z преобразования.

ω0 - частота среза фильтра погрешности следования по траектории (ПСТ);
ω1 - частота среза фильтра шумов управления (ШСУ);
ω2 - частота среза выходного фильтра приемника
Рисунок Д.1 - Частотные характеристики фильтра приемника
ПРИЛОЖЕНИЕ Е
(рекомендуемое)
Обработка результатов измерений для определения погрешностей наведения
Значения ПСТ, ШСТ и ШСУ определяют при полете самолета-лаборатории по заданной траектории и определении истинного положения самолета средствами траекторных измерений. Из этих значений вычитают сигнал бортового угломерного оборудования с данными об угловом положении самолета и сигнал от средств траекторных измерений с данными об истинном положении. Полученный в результате вычитания сигнал пропускают через фильтры ПСТ и ШСУ, к выходам которых подключена аппаратура регистрации (записи). Структурная схема измерений приведена на рисунке Е.1.
На рисунке Е.2 представлен пример записи сигнала с выхода фильтра.
Для определения ПСТ и ШСУ азимута захода на посадку и азимута ухода на второй круг обработку записей с выходов фильтров проводят в течение любого 40-секундного интервала записи.
Для определения значений ПСТ и ШСУ угла места захода на посадку и выравнивания производят обработку записей сигналов с выходов фильтров в течение любого 10-секундного интервала записи.
Для указанных интервалов обработки записи определяют среднее значение сигнала, являющееся прямой линией, над и под которой площади, ограниченные записью сигнала, равны. Эта прямая определяет положение средней линии наведения в интервале Т.
Кроме средней линии наведения, проводят две прямые, параллельные ей, которые расположены на равных расстояниях от нее. Эти линии проводят так, чтобы выполнялось условие
(Т1 + Т2 + Т3 +, ..., + Т) ≤ 0,05 Т.
Требования в части ШСТ и ШСУ обеспечивают системой МЛС, если погрешность наведения (рисунок Е.2) меньше заданных предельных погрешностей.
Требования в части ШСТ и ШСУ обеспечивают с заданной доверительной вероятностью Р = 95 %, если значения этих погрешностей не превышают установленных пределов в течение более чем 5 % оценочного интервала Т, то есть
(Т1 + Т2 + Т3 +, ..., + Т) ≤ 0,05 Т.
Если график (рисунок Е.2) является записью сигнала с выхода фильтра ПСТ, то разность А между угловым положением средней линии наведения и угловым положением средней линии истинного положения, которое определяется по данным траекторных измерений, характеризует погрешность положения средней линии пути (усредненной глиссады).
Если график (рисунок Е.2) является записью сигнала с выхода фильтра ШСУ, то разность А должна быть равна нулю.
Обработку результатов измерения погрешностей радиодальномера проводят аналогично обработке результатов измерения угломерным оборудованием с той разницей, что для режима КЭП используется Т = 10 с, а для режима НЭП Т = 40 с.

ω0 - фильтр погрешности следования по траектории; ω1 - фильтр шумовой погрешности управления; ω2 - выходной фильтр
Рисунок Е.1 - Структурная схема измерений погрешностей наведения
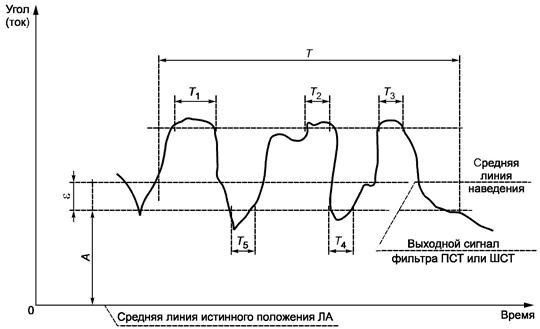
Т1 + Т2 + Т3, + ..., + Т) ≤ 0,05 Т;
ε - предел погрешности наведения ШСТ или ШСУ;
А - погрешность положения средней линии наведения;
Т - участок оценки
Рисунок Е.2 - Метод обработки результатов измерений
ПРИЛОЖЕНИЕ Ж
(обязательное)
Зоны наведения угломерных устройств
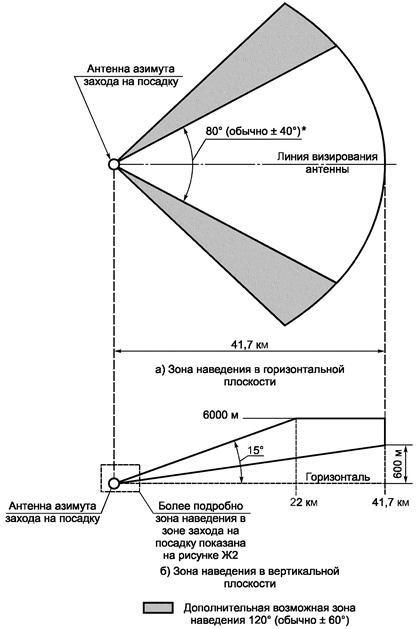
* Фактический сектор зоны наведения, начинающийся от фазового центра установленной антенны.
Рисунок Ж..1 - Зона наведения по азимуту захода на посадку
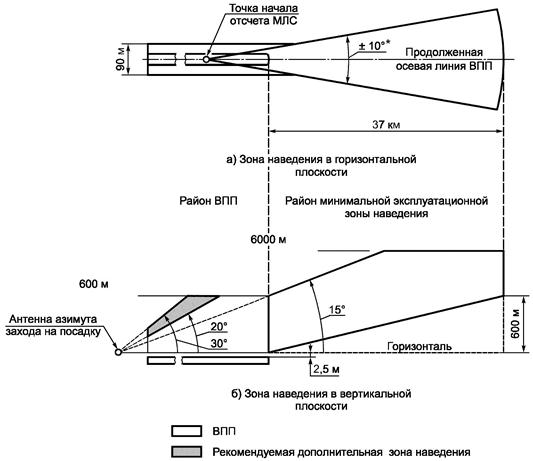
* Минимальный требуемый сектор пропорционального наведения независимо от расположения или ориентации оборудования
Рисунок Ж.2 - Зона наведения по азимуту в районе ВПП и район минимальной эксплуатационной зоны наведения
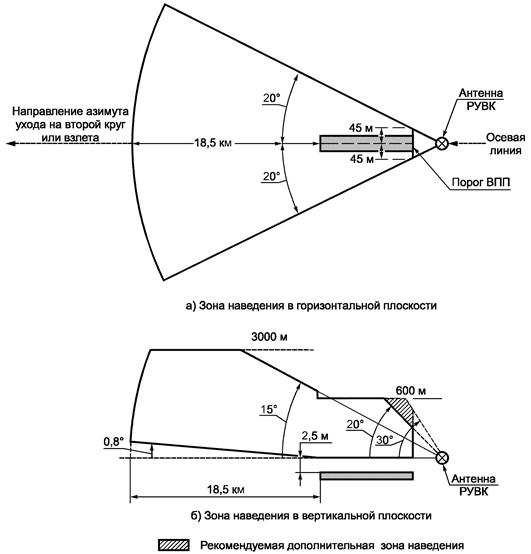
Рисунок Ж.3 - Зона наведения по азимуту ухода на второй круг
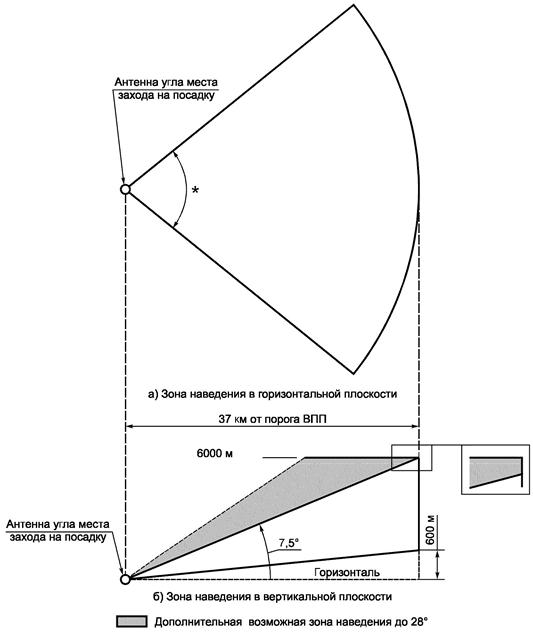
* Сектор зоны наведения, начинающийся от фазового центра установленной антенны. Ширина равна сектору пропорционального наведения по азимуту захода на посадку.
Рисунок Ж.4 - Зона наведения по углу места в районе захода на посадку
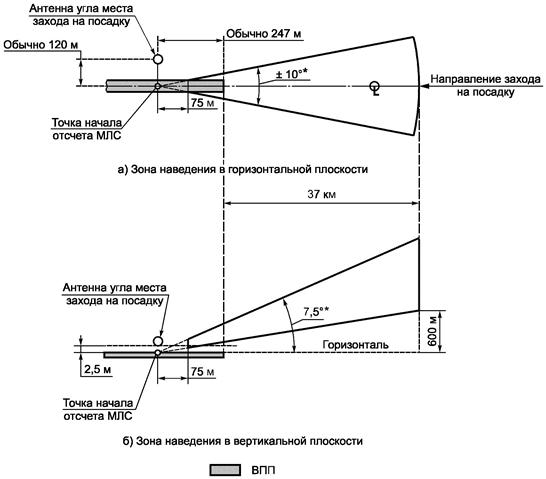
* Минимальный требуемый сектор пропорционального наведения независимо от расположения или ориентации оборудования
Рисунок Ж.5 - Минимальная эксплуатационная зона наведения по углу места
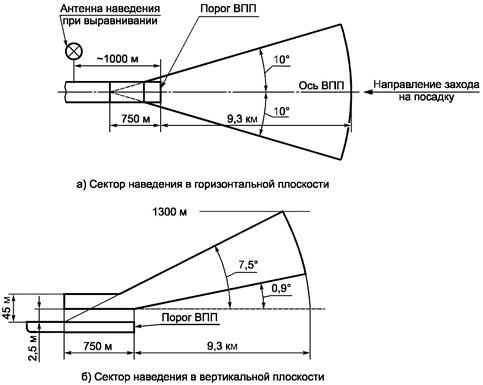
Рисунок Ж.6 - Зона наведения по углу места при выравнивании
ПРИЛОЖЕНИЕ И
(справочное)
[1] Стандарт ИКАО Приложение 10 к Конвенции ИКАО о гражданской авиации (1996 г.)
Ключевые слова: система МЛС, радиомаячная система инструментального захода летательных аппаратов на посадку сантиметрового диапазона волн, азимутальный радиомаяк МЛС, угломестный радиомаяк МЛС, радиомаяк ухода на второй круг, зона наведения, зона захода на посадку, зона ухода на второй круг, зона ВПП, сектор пропорционального наведения, сектор наведения по клиренсным сигналам, клиренсный сигнал